초음파 비이컨을 사용한 이동로봇 실내 주행용 파티클 필터 SLAM
김태균
*
․고낙용**
․노성우***
Particle Filter SLAM for Indoor Navigation of a Mobile Robot Using Ultrasonic Beacons
Tae-Gyun Kim * ․Nak-Yong Ko ** ․Sung-Woo Noh ***
요 약
본 논문에서는 파티클 필터 방법을 이용한 이동로봇의 SLAM(Simultaneous Localization and Mapping) 방 법을 제안한다. 이동로봇의 SLAM은 지도가 주어지지 않는 환경에서 로봇 스스로 자신의 위치를 파악하는 것과 동시에 지도를 만드는 것이다. 제안된 방법은 로봇의 위치를 추정함과 동시에 특징점인 외부 비이컨들 의 위치를 추정하는 방법을 다루고 있다. 특히 파티클 필터 방법을 적용하여 이동로봇과 특징점 위치를 파티 클의 분포에 의해 확률적으로 표현한다. 제안된 SLAM방법은 이동로봇의 동작 뿐 아니라 특징점 위치의 불 확실성을 고려한다. 따라서 매 샘플링 시각에 특징점의 위치 정보도 불확실성을 고려하여 예측되어진다. 제안 된 방법의 성능을 시뮬레이션과 실험을 통하여 평가하였다. 제안된 방법은 비이컨으로 부터의 거리 정보에 불규칙한 잡음이 있는 환경에서도 실질적으로 사용가능한 지도 정보를 제공하였다. 또한 통상의 최소자승법 이나 데드레크닝 방법에 비해서 보다 정확하고 강건하게 로봇의 위치를 추정하였다.
ABSTRACT
This paper proposes a particle filter approach for SLAM(Simultaneous Localization and Mapping) of a mobile robot. The SLAM denotes estimation of both the robot location and map while the robot navigates in an unknown environment without map.
The proposed method estimates robot location simultaneously with the locations of the ultrasonic beacons which constitute landmarks for navigation. The particle filter method represents the locations of the robot and landmarks in probabilistic manner by the distribution of particles. The method takes care of the uncertainty of the landmarks' location as well as that of the robot motion. Therefore, the locations of the landmarks are updated including uncertainty at every sampling time. Performance of the proposed method is verified through simulation and experiments. The method yields practically useful mapping information even if the range data from the landmarks include random noise. Also, it provides more accurate and robust estimation of the robot location than the usual least squares methods or dead-reckoning method.
키워드
SLAM, Particle filter, Ultrasonic beacon, Localization, Mapping, Mobile robot, Indoor navigation 슬램, 파티클 필터, 초음파 비이컨, 위치추정, 지도작성, 이동로봇, 실내 자율주행
* 조선대학교 제어계측공학과([email protected]) ** 교신저자 : 조선대학교 제어계측로봇공학과([email protected])
*** 조선대학교 정보통신공학과([email protected])
접수일자 : 2012. 01. 16 심사(수정)일자 : 2012. 03. 19 게재확정일자 : 2012. 04. 07
Ⅰ. 서 론
이동로봇이 미지의 환경에서 복잡한 임무를 수행하 기 위해서는 주행하는 환경 정보를 획득하여 자신의 위치를 파악하면서 작업공간까지 이동해야 한다[1][2].
이것은 이동로봇이 미지의 환경을 주행하면서 주변 환경을 인지하고 그 환경에 대한 로봇의 상대적인 위 치를 동시에 추정하는 SLAM문제이다[3]. SLAM은 이동로봇이 미지환경에서 자율 주행 구현을 위한 가 장 기본적이면서도 핵심이 되는 기술이지만 정확한 지도와 함께 로봇 자신의 위치를 동시에 알아내는 것 은 어려운 작업이라 할 수 있다. 이는 정확한 지도 작 성을 위해 로봇의 위치를 정확히 추정해야 하고, 정확 한 위치를 추정하기 위해서는 지도가 정확해야만 한 다[4]. 하지만 실제 이동로봇이 주행하는 환경에서는 불확실성이 포함된 센서정보를 이용해 지도를 작성하 고, 작성된 지도를 이용해 로봇의 위치를 추정하는 것 은 나쁜 결과를 가져올 수 있다.
본 논문은 파티클 필터(Particle Filter)[5]방법을 적 용하여 로봇과 외부 특징점들의 위치를 동시에 추정 하는 SLAM방법을 제안한다. 여기서 특징점은 외부 비이컨들의 위치를 의미하고, 로봇은 비이컨으로 부터 의 거리 정보를 이용하여 위치를 추정한다. 또한 제안 된 방법의 결과는 시뮬레이터 방법들[6][7]이 아닌 실 제 환경에서 동작하는 이동로봇에 적용하여 SLAM데 이터를 획득한 후 결과를 분석하였다.
이동로봇 분야에서 로봇의 위치추정을 위해 제안된 파티클 필터 방법은 레이저 센서, 초음파 비컨, GPS 센서등 다양한 센서들이 적용되어 많은 연구가 이루 어졌고[8][9][10], 근래에는 수중로봇의 위치추정 분야 에서도 제안되고 있다[11][12]. 이동로봇의 위치를 알 아내기 위한 방법중 하나인 삼변측량[13]과 파티클 필 터 방법을 비교하여 보면, 삼변측량은 3변의 길이로부 터 로봇의 위치(x,y)를 알아낼 수 있으나 로봇의 방향 (θ)를 알 수 없고, 지도와 로봇 사이에 장애물이 존재 할 경우 잘못된 위치를 가르킬 수 있다. 반면에, 파티 클 필터는 로봇의 위치와 방향 뿐 아니라 이동로봇의 동작과 센서신호원들의 불확실성이 고려되어 삼변측 량의 문제점을 잘 해결할 수 있다. 이러한 파티클 필 터 방법을 이용해 본 논문은 이동로봇의 SLAM에 접 근하며, 이동로봇과 특징점들의 위치를 추정한다.
본 논문의 구성은 다음과 같다. Ⅱ장에서 제안하는 SLAM방법에 대해 분석 및 구현과정을 설명한다. Ⅲ 장에서는 실제 이동로봇을 가지고 SLAM을 적용한 결과를 고찰한다. 끝으로 Ⅳ장에서는 본 논문의 결론 을 맺는다.
Ⅱ. SLAM 방법
본 논문에서 제안하는 SLAM방법은 파티클 필터 방법에 기반하고 있다. 이방법은 이동로봇이 위치할 수 있는 위치와 외부의 특징점에 대해 파티클들로 표 현하는 방법이다. 본 절에서는 파티클 필터를 이용하 여 이동로봇 SLAM에 접근한 방법을 설명한다.
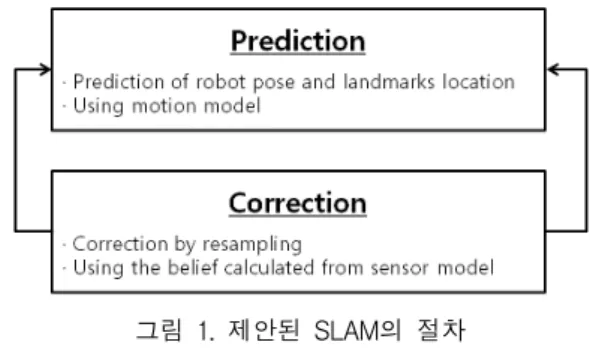
제안된 방법은 그림 1과 같이 Prediction과 Corr- ection과정으로 구성된다. Prediction과정은 로봇과 특 징점의 위치를 예측하는 과정으로, 모션모델을 이용하 여 로봇의 속도정보에 에러정보를 추가하여 로봇과 특징점을 예측한다. Correction과정은 센서모델에 의 해 모션모델에서 예측된 로봇과 특징점에 대하여 추 정 신뢰도를 계산한 후, 리샘플링에 의해 추정된 로봇 과 특징점의 위치를 재생성한다.
그림 1. 제안된 SLAM의 절차
Fig. 1 Procedure of the proposed SLAM method
2.1 SLAM의 구성
본 논문에서 제안하는 SLAM방법은 모션모델, 센
서모델, 그리고 리샘플링 3단계로 구성되어진다. 표 1
의 3 : Motion model()은 이전 시각(t-1)에서 현재 시
각(t)에서 로봇의 직진속도, 회전속도에 대해 불확실
성이 고려되어 로봇과 특징점을 예측하는 과정이다. 4
: Sensor model()은 모션모델에 의해 예측된 파티클
에 대해 추정 신뢰도를 부여하는 부분이다. 로봇의 현
재 위치에서 수신된 거리정보와 예측된 파티클을 가 지고 거리정보에 대한 불확실성 분포도를 만든다. 이 와 같이 생성된 분포도를 바탕으로 파티클들에 대해 추정 신뢰도를 계산한다. 7 : Reampling()은 파티클의 추정 신뢰도를 기반으로 파티클들을 재생성하는 과정 이다. 이러한 과정으로 매 샘플링마다 로봇 위치와 특 징점이 파티클들의 분포에 의해 추정된다.
표 1. SLAM 알고리즘 Table 1. SLAM algorithm
====
==========
==========
==========
=
=
=
=
=
=
=
====
==========
==========
==========
====
==========
==========
==========
−
−
t
[j]
t [j]
t
[j]
t t [j]
t
[j]
t t [j]
t t t
t t t
X return .
endfor .
) B ( Resampling x
.
do M to j for .
endfor .
) x , model(z Sensor
B .
) ,x model(u Motion
x .
do M to j for .
X X .
) ,z ,u SLAM(X Algorithm
9 8 7
1 6
5 4 3
1 2
1
1 1
φ
2.2 모션모델
본 논문에서 제안하는 이동로봇에 대한 모션모델은 이동로봇의 속도 명령과 불확실성 파라미터들에 의해 파티클들의 위치를 예측하는 과정이다. 표 2는 이동로 봇의 위치와 외부 비이컨들의 특징점을 추정하기 위 한 모션모델을 나타낸다. 예측되는 파티클의 위치는 이동로봇 속도정보에 대한 불확실성 파라미터들(α1∼
α6)를 포함하여 이동로봇 위치를 예측하게 된다. 또한 외부 비이컨들의 위치에 대한 특징점은 거리정보에 대한 불확실성 파라미터인 α7에 의해 예측된다.
표 2. 모션모델 Table 2. Motion model
+ +
=
========
==========
==========
==========
========
==========
==========
==========
− t t
) w v ( sample v vˆ
) ,x u ( model Motion
α α
1 21
========
==========
==========
==========
′
′
′
′
′
′
= ′ +
′ = +
=
′
=
Δ + Δ +
′ =
Δ +
− +
′ =
Δ + +
−
′ =
+
=
+ +
=
T N N 1 1 r r r t
j j
j j
) y m , x m ,..., y m , x m , , y , x ( x return
for end
) ( sample my y m
) ( sample mx x m
do N to j for
ˆ t t w ˆ
) t w ˆ w ˆ cos(
cos vˆ w ˆ y vˆ y
) t w ˆ w ˆ sin(
sin vˆ w ˆ x vˆ x
) w v ( sample ˆ
) w v ( sample w w ˆ
θ α α γ
θ θ
θ θ
θ θ
α α γ
α α
7 7 6 5
4 3
1
식 (1)은 표 2의 x t-1 과 u t 의 정보를 나타낸다. x t-1
은 시각 t-1에서 파티클의 위치이고, u t 는 이동로봇 직진속도와 회전속도 정보를 나타낸다.
[ ]
[t t]T
T 1 t N 1 t N 1 t 1 1 t 1 1 t r 1 t r 1 t r
w , v
my , mx , , my , mx , , y , x
=
=
− − − − − − −− t
1 t
u
x
θL
(1)
그림 2는 직진속도 파라미터 α1과 α2에 따른 로봇 위치의 파티클들의 분포를 보여준 것이다. 이동로봇 직진속도 파라미터 α1과 α2의 적을때, 그림 2의 a와 같이 파티클들은 조밀한 분포도를 형성한다. α1과 α2 의 값이 클 경우, 그림 2의 b처럼 파티클들은 직진방 향으로 넓게 형성되어짐을 볼 수 있다.
그림 2. 직진속도 불확실성에 의한 파티클의 분포 Fig. 2 Particle distribution due to translational velocity
uncertainty
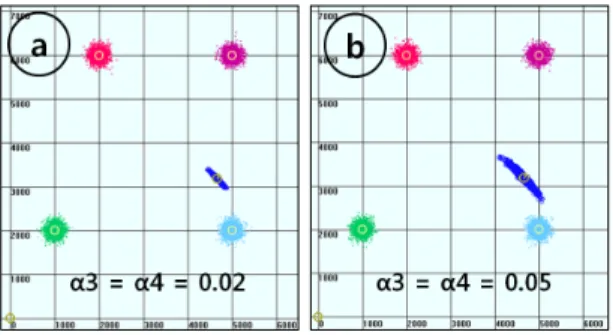
회전속도 파라미터 α3와 α4는 로봇의 회전방향에
대한 파티클들의 분포도를 결정한다. α3와 α4의 값이
적으면 그림 3의 a와 같이 로봇의 회전방향으로 파티 클들이 조밀하게 분포되고, 파라미터들의 값이 크면 그림 그림 3의 b처럼 파티클들이 넓게 분포되어진다.
그림 3. 회전속도 불확실성에 의한 파티클 분포 Fig. 3 Particle distribution due to rotational velocity
uncertainty
그림 4는 외부 비이컨 위치인 특징점 파라미터 α7 값에 따른 파티클의 분포도를 나타낸 것이다. α7의 파라미터 값이 작으면 지도 파티클들은 특징점들 주 변에 조밀하게 분포되어지고, 파라미터 값이 크면 파 티클들이 넓게 분포된다. 그림 4의 a는 특징점 파라 미터 값이 적었을 때의 파티클들 분포도를 나타내고 b는 파라미터 값이 크게 존재할 때의 분포도이다.
그림 4. 특징점 위치 불확실성에 의한 파티클 분포 Fig. 4 Particle distribution due to landmark location
uncertainty
2.3 센서모델
센서모델은 각각의 파티클에 대한 신뢰도를 부여하 는 과정이다. 모션모델에 의해 예측된 파티클들은 센 서모델에서 수신된 거리정보를 바탕으로 추정 신뢰도 를 각각 부여 받게 된다. 센서모델은 식 (2)∼(5)와 같이 가우시안 확률분포, 지수 확률분포, 센싱 실패분
포, 그리고 설명 불가능 측정분포로 구성되며, Z t k
는 외부 비이컨들의 수신데이터
이다.
식 (2)는 가우시안 확률분포로 센서신호가 제대로 수신될 확률분포를 나타낸다. 이 확률분포는 로봇 파 티클과 특징점 파티클들 사이의 거리를 중심으로 한 에러분포로 표현할 수 있다.
2 2
2 2 2
2
2 1
0
0
hit
* kt tk
z ) z ( hit
* k t k t
max k t
* k t k t t
k t hit
e )
, z
; z ( N
otherwise z z if ) , z
; z ( ) N x
| z ( P
σ
σ πσ
σ η
− −
=
⎩ ⎨
⎧ ≤ ≤
=
(2)
지수 확률분포는 식 (3)과 같다. 이 분포는 예측된 로봇과 특징점들 사이에 동적인 장애물이 존재할 수 있는 에러 분포이다.
⎪⎩
⎪ ⎨
⎧ ≤ ≤
=
−
−
otherwise z z z if ) e
x
| z (
P max
k t
* k t ) Z Z ( long t
k t long
k t max long
0 ηλ λ
(3)
센싱 실패분포는 식 (4)와 같이 표현할 수 있으며, 센서의 신호가 수신되지 않거나, 센서가 동작하지 않 는 상황에서의 분포이다.
⎩ ⎨
⎧ =
=
=
= otherwise
z z ) if z z ( I ) x
| z (
P max
k t max
t k t
max 0
1
(4)
설명 불가능 측정분포는 식 (5)와 같다. 이 분포도 는 벽의 반사나 혼선으로 인해 거리정보의 값이 올바 르지 못할 경우를 나타낸다.
⎪⎩
⎪ ⎨
⎧ ≤ <
=
otherwise z z z if
) x
| z (
P
maxk t max
t k t rand
0 1 0
(5)
식 (2)∼(5)에서 설명된 4개의 분포도는 식 (6)와
같이 하나의 센서모델 분포도 표현된다.
=1 + + +
⎟⎟
⎟⎟
⎟
⎠
⎞
⎜⎜
⎜⎜
⎜
⎝
⎛
⎟⎟
⎟⎟
⎟
⎠
⎞
⎜⎜
⎜⎜
⎜
⎝
⎛
=
rand max long hit
t k t rand
t k t max
t k t long
t k t hit T
rand max long hit
t k t
z z z z
) x
| z ( p
) x
| z ( p
) x
| z ( p
) x
| z ( p
z z z z ) x
| z ( P
(6)
표 3은 추정신뢰도 획득을 위한 방법을 나타낸 것 이다. 식 (6)에서 나타낸 바와 같이 4개의 분포도를 가지고 로봇에 수신되는 거리데이터와 추정된 로봇 위치 및 특징점들의 위치에 대하여 파티클들의 추정 신뢰도를 획득한다.
표 3. 센서모델 Table. 3 Sensor model
======
==========
==========
==========
==========
⋅
=
⋅ +
⋅ +
⋅ +
⋅
=
=
=
======
==========
==========
==========
==========
======
==========
==========
==========
==========
for end
p q q
) x
| z ( p z ) x
| z ( p z
) x
| z ( p z ) x
| z ( p z p
casting ray using z t measuremen the
for z compute
do K to k for q
) x , z ( model Sensor
k t k t rand rand k t k t max max
k t k t long long k t k t hit hit
* k t k
t t t
1 1
2.4 파티클 리샘플링
파티클 리샘플링은 센서신호에 근거해 이동로봇과 특징점의 위치를 추정하는 과정이다. 이 과정은 파티 클의 신뢰도에 따라 파티클들을 재생성하고 일반적으 로 룰렛(Roulette)방법[14]과 확률론적 일반 샘플링 (Stochastic Universal Sampling)[15]등이 사용된다.
룰렛 방법은 적은 신뢰도를 가진 파티클들이 제대로 선택하지 못하는 균형 선택의 문제점이 지니고 있다.
본 논문에서는 표 4와 같이 확률론적 일반 샘플링 방 법을 사용하여 파티클들을 재생성 한다.
표 4. 파티클 리샘플링 Table. 4 Particle resampling
=
=
========
==========
==========
========
==========
==========
c P into Tb Devide Ra
partilces total on Pb the Add Tb
) Pb , Pc ( Resampling
========
==========
==========
=
endfor
Sa to responded particle
Select
Sa to Ra Add Sa
do Pc to for 1
Ⅲ. 실험 및 고찰
본 논문에서 사용된 이동로봇과 외부 비이컨은 그 림 5와 같다. 실험에 이용된 이동로봇은 레드원테크놀 러지(주)[16]에서 개발된 차륜형 로봇으로 이더캣 통 신을 이용하여 로봇을 제어한다. 외부 비이컨으로 사 용된 센서는 초음파 기반으로 동작하며, KOREA LPS[17]에서 개발된 위치추정 시스템이다. 이 시스템 은 최소자승법에 의한 삼변측량 결과를 이동로봇에 제공하고 초음파 비이컨 4개, 위성들의 동기화 및 데 이터 전송을 위한 방송기, 수신기, 그리고 초음파 비 이컨의 거리 및 좌표정보를 수신하는 수신기로 구성 된다.
그림 5. 이동로봇과 외부 비이컨 Fig. 5 Mobile robot and ultrasonic beacon system
그림 6은 이동로봇이 실내에서 주행한 실험실 내부
환경을 보여준다. 외부 비이컨들은 천장에 설치되고,
초음파 수신기는 이동로봇에 장착된다. 그림 6에서 보
이는 라인은 이동로봇이 지나가는 경로이다.
그림 6. 실험환경 Fig. 6 Environment for experiment
그림 7은 실험의 조건을 나타낸 것으로, 외부 비이 컨의 위치 B1(0m, 0m), B2(5.8m, 0m), B3(5.8m, 5.6m), B4(0m, 5.6m)에 설치되어져있다. 그리고 이동 로봇은 설정된 4개의 경유점 WP1(1.7m, 1m), WP2(4.8m, 1m), WP3(4.8m, 4.6m), WP4(1m, 4.6m)를 경유하면서 지정된 이동경로를 따라 이동한다. 이동로 봇은 경유점 WP1에서 WP4를 경유하고 다시 WP1로 되돌아오며, 이러한 방법으로 9회 주행하였다.
그림 7. 실험조건 Fig. 7 Condition for experiment
그림 8은 이동로봇이 지정된 경유점을 1회 왕복한 과정을 보인 것이다. 그림 8에서 PF는 제안된 방법이
적용된 로봇 파티클의 위치, DR은 데드레크닝 정보에 의한 로봇의 위치, 그리고 LPS는 초음파 비이컨 센서 에서 제공해 주는 삼변측량에 의한 로봇의 위치이다.
또한 a는 제안된 SLAM 결과를 보인 그림이며, b는
삼변측량에 의한 결과이다. 파티클들 초기화시 지도에
대한 파티클들은 수신된 거리데이터에 비례하여 파티
클들이 분포되어지고 로봇 파티클들은 이동로봇의 시
작 위치에서 분포한다. 이후 시간이 경과함에 따라 이
동로봇 파티클들과 외부 비이컨의 특징점에 대한 파
티클들은 로봇과 특징점 사이의 거리정보에 비례하여
파티클들이 분포된다.
그림 8. 1회 왕복에 대한 실험과정
Fig. 8 Procedure of the experiment for motion between two points
그림 9는 이동로봇이 주어진 이동경로 따라 주행하 기 시작한 후 781.43초 경과한 상황으로 로봇은 경유 점 3에서 2로 진행하고 있는 상태이다. 그림 9의 a는 SLAM의 결과로서, 이동로봇 위치추정에 대한 파티 클들은 경유점 3∼2사이의 이동로봇 주행경로 주위에 분포되어져 있다. 그리고 외부 비이컨에 대한 특징점 4개에 대한 파티클들도 특징점들 주위 분포되어져 있 음을 확인할 수 있다. 하지만 그림 9의 b에서 삼변측 량 결과인 LPS 위치는 로봇의 이동경로가 아닌 잘못 된 위치를 추정하고 있다. 이러한 원인은 로봇과 B4 사이에서 수신된 거리데이터의 에러가 크게 존재했기 때문이다. 따라서 삼변측량을 이용하여 위치추정을 할 경우 로봇과 외부 비이컨들 사이에 유효한 데이터를 가질 때 올바른 위치추정 결과를 얻을 수 있다. 또한 그림 9의 a, b에 표현된 데드레크닝 결과 DR은 센서 오차의 누적으로 인해 올바르지 못한 위치추정 결과 를 보이고 있다.
그림 9. t=781.43초 에서의 SLAM 결과 Fig. 9 SLAM at t=781.43sec
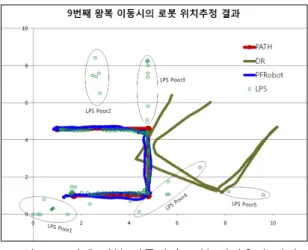
그림 10은 이동로봇이 주행경로를 따라 9번째 왕복 한 궤적을 나타내며 이동로봇이 주행된 시간 697.371 초부터 815.244초까지의 결과이다. 그림 10에서 표시 된 PATH는 이동로봇이 주행한 주행경로, DR은 이동 로봇의 데드레크닝 정보에 의한 궤적, PFRobot은 제 안된 SLAM방법에 의한 로봇 위치추정 궤적, 그리고 LPS는 삼변측량에 의한 로봇의 위치추정 결과이다.
또한 LPS Poor1∼5는 삼변측량에 의한 로봇의 위치
추정 결과 중 한 부분이다. 이는 거리정보의 신호가
부정확할 때 나타난 현상으로 로봇이 이동한 이동경
로와 전혀 다른 결과를 보여준다. 그림 10에서 보는
바와 같이 데드레크닝 정보는 센서오차의 누적으로
인해 이동로봇의 주행경로를 벗어나 잘못된 궤적을
그리고 있다. 그리고 삼변측량은 이동로봇 주행경로의
주변에 대부분 분포되어져 있지만, 거리정보가 부정확
할 때 LPS Poor1∼5처럼 잘못된 위치가 추정됨을 확
인할 수 있다. 이는 외부 비이컨들로부터 출력되는 센
서신호들이 적절하지 못할 때 나타나는 현상으로, 비
이컨과 수신기 사이에 동적 및 정적인 장애물이 존재
하거나, 센서신호에 에러가 많이 포함되어져 있을 때
잘못된 위치가 추정된다. 하지만 제안된 SLAM방법
으로 이동로봇의 위치를 추정한 경우, 이동로봇의 이
동경로 주위에 파티클들이 분포되어져 있어 데드레크
닝과 삼변측량 방법들 보다 좋은 위치추정 결과를 보
인다.
그림 10. 9번째 왕복 이동시의 로봇 위치추정 결과 Fig. 10 Localization result for the 9-th round-trip
motion
그림 11은 이동로봇이 주행경로를 따라 9번째 이동 한 상황에서 제안된 SLAM 방법으로 4개의 특징점에 대해 위치를 추정한 결과이다. 여기서, PFBn은 SLAM에 의해 추정된 외부 비이컨 n번째의 위치를 나타내고, 비이컨들은 실제 환경에 위치한 외부 비이 컨들의 위치정보 좌표이다. 그림 11에서 보면 SLAM 방법에 의해 추정된 외부비이컨 파티클들은 실제 설 치된 비이컨들 주변 B1∼B4의 주변에 위치되어져 있 음을 확인할 수 있다. 여기서 PFB1이 B1으로 추정된 이유는 획득된 SLAM 결과중 B1의 지도 정보를 원점 으로 설정하였기 때문이다. 또한 B1과 B2의 사이의 각도만큼 회전시켜 데이터를 분석하였기 때문에 B2에 대한 지도정보가 X축으로 분포되어져 있다.
그림 11. 9번째 왕복 이동시에 구해진 지도 Fig. 11 Mapping result for the 9-th round-trip motion
Ⅳ. 결 론
본 논문은 이동로봇이 미지의 환경에서 자신의 위 치를 추정하고 동시에 외부 특징점들의 위치를 추정 하는 방법을 보였다. 제안된 방법은 이동로봇과 특징 점의 불확실성을 고려한 방법으로, 실제 환경에서의 반복적인 실험을 통해 그 결과를 분석하여 타당성을 검증하고 있다. 실험에서 보인바와 같이 데드레크닝 정보를 이용해 이동로봇 위치를 추정할 때에는 시간 이 경과함에 따라 모션에러가 누적되어 자신의 위치 를 잃어버리게 된다. 삼변측량의 경우 데드레크닝 방 법과는 달리 센서오차가 누적되지 않고, 로봇과 외부 비이컨 사이의 거리정보를 이용하여 로봇의 위치를 추정한다. 하지만 실제 환경에서는 예상치 못한 동적, 정적인 장애물들과 환경적 요인등으로 인해 거리에 대한 오차가 발생하였다. 실제 실험에서는 이와같은 이유로 이동로봇의 잘못된 위치추정 결과의 원인이 되었으며, 종종 위치추정 결과가 튀는 현상을 발견할 수 있었다. 하지만 제안된 방법은 로봇의 이동경로 주 위에 장애물들과 센서정보의 불확실성이 존재하는 상 황에서도 이동로봇과 특징점들에 대한 위치추정이 가 능함을 실험을 통해 알 수 있었다.
앞으로 다양한 센서를 이용해 제안된 알고리즘을 적용하고, 여러 환경에서 센서데이터 획득 후 비이컨 들에 대한 센서모델링을 수행할 것이다. 그리고 본 논 문에서 제안된 SLAM과 여러 연구에서 제안된 SALM방법들과의 비교 분석하여 제안된 SLAM방법 의 효율성을 검증할 것이다. 또한 이동로봇과 외부 비 이컨의 높이를 측정할 수 있는 센서를 추가하여 3차 원 SLAM을 진행할 예정이다.
감사의 글
본 연구는 교육과학기술부, 한국연구재단의 2010년 지역혁신인력양성사업(과제명 : 로봇의 자율주행 요 소 기술 상용화 및 인력양성, 과제관리번호: 2010-04- 대-01-016)의 지원에 의해 이루어짐.
참고 문헌
[1] S. Thrun, “Learning metric-topological maps
for indoor mobile robot navigation”, Artificial
Intelligence, Vol. 99, No. 1, pp. 21-71, 1998.
[2] J. Borenstein, B. Everett, and L. Feng,
“Navigating Mobile Robots: Systems and Techniques, A. K. Peters, Ltd.”, 1996.
[3] 안수용, 강정관, 이래경, 오세영, “실내 복도 환 경에서 선분 특징점을 이용한 비전 기반의 지도 작성 및 위치 인식”, 제어·로봇·시스템학회 논문 지, Vol. 16, No. 1, pp. 40-47, 2010.
[4] 이용주, 송재복, “동적 환경에서 이동로봇의 동 시적 위치추정 및 지도작성”, 2005 제어·자동화·
시스템공학회 합동학술발표대회, 11, 2005.
[5] S. Thrun, W. Burgard, and D. Fox, “Pro- babilistic robotics,” MIT Press, Cambridge, 2005.
[6] 배영철, 박종규, “카오스 이론에 기반한 포메이 션 제어를 위한 다중 카오스 로봇의 장해물 회 피 및 동기화에 관한 연구”, 한국전자통신학회 논문지, 5권, 5호, pp. 534-540, 2010.
[7] 김광진, 고낙용, 박세승, “시뮬레이션을 이용한 이동 로봇의 충돌회피 알고리즘 비교”, 한국전 자통신학회논문지, 7권, 1호, pp. 187-194, 2012.
[8] 고낙용, 김태균, “외부 센서를 이용한 이동 로봇 실내 위치 추정”, 제어로봇시스템학회 논문지, 16권, 5호, pp. 420-427, 5, 2010.
[9] 노성우, 고낙용, 김태균, “위치 추정, 충돌 회피, 동작 계획이 융합된 이동로봇의 자율주행 기술 구현”, 한국전자통신학회논문지, 6권, 1호, pp.
148-156, 2011.
[10] 노성우, 김태균, 고낙용, “GPS센서와 MCL알고 리즘을 이용한 실외환경에서의 이동로봇 위치추 정”, 2011년도 추계학술대회 학술발표 논문집, 21권, 2호, pp. 49-51, 12, 2011.
[11] 김태균, 고낙용, 노성우, 이영필, “몬테카를로 위 치추정 알고리즘을 이용한 수중로봇의 위치추 정”, 한국전자통신학회논문지, 6권, 2호, pp.
288-295, 2011.
[12] N. Y. Ko, T. G. Kim and S. W. Noh, “Monte Carlo Localization of Underwater Robot Using Internal and External Information”, Services Computing Conference (APSCC), 2011 IEEE Asia-Pacific, pp. 410-15. 12, 2011.
[13] F. Thomas, and L. Ros, “Revisiting trila- teration for robot localization”, IEEE Transactions on Robotics, Vol. 21, No. 1, pp.
93-101, 2005.
[14] 김태균, “유비쿼터스 센서 환경에서의 이동로봇 위치추정”, 조선대학교 석사학위 논문, 2009.
[15] J. E. Baker, “Reducing bias and inefficiency in
the selection algorithm” Proc. of the 2nd International Conference on Genetic Algorithms, pp. 14-21, 1987.
[16] http://www.redone-technologies.com/
[17] http://korealps.co.kr/
저자 소개
김태균(Tae-Gyun Kim)
2007년 조선대학교 제어계측공학 과 졸업(공학사)
2009년 조선대학교 대학원 제어 계측공학과 졸업(공학석사) 2009년~현재 조선대학교 대학원 제어계측학과 공학박사 과정
※ 관심분야 : 이동로봇, 수중로봇, 자율주행
고낙용(Nak-Yong Ko)
1985년 서울대학교 제어계측공학 과 졸업(공학사)
1987년 서울대학교 대학원 제어 계측공학과 졸업(공학석사) 1993년 서울대학교 대학원 제어계측공학과 졸업 (공학박사)
1997~1998, 2004~2005 미국 Carnegie Mellon Univ. Visiting research scientist
1992년~현재 조선대학교 제어계측로봇공학과 교수
※ 관심분야 : 지상로봇과 수중로봇의 자율주행
노성우(Sung-Woo Noh)