논문 2011-6-26
스마트 폰을 이용한 모바일로봇의 리모트 주행제어 시스템
Remote Navigation and Monitoring System for Mobile Robot Using Smart Phone
박종진*, 최규석**, 천창희***, 박인규****, 강정진*****
Jong-Jin Park, Gyoo-Seok Choi, Chang-Hee Chun, In Ku Park, Jeong-Jin Kang
요 약 본 논문에서는
Zigbee
기반 무선센서네트웍과 레고 마인드스톰NXT
모듈을 이용하여 이동로봇의 원격주행제 어시스템을 개발하였다.
기존 회전센서(encoder)
에 의한 이동로봇 위치제어의 오차 문제(
미끄러짐 등)
를 해결하고 좀 더 정확하게 이동로봇을 제어하기 위해 본 논문에서는 무선센서네트웍상의 초음파모듈을 사용하였다.
초음파의 문제점 인 직진성과 협소한 감지범위의 단점을 극복하기 위해 이동로봇에 부착된 이동 노드를360
도 회전시킴으로써4
개의 고정 노드로부터 각각의 거리를 측정하여 삼각측량법에 의해 로봇의 정확한 위치를 추정하였다.
또한 이동로봇의 전면 에 부착된USB
웹 카메라를 사용하여 스마트폰으로 영상이 송신되도록 하였다.
그 결과 스마트폰을 통해 로봇의 위 치와 이동로봇의 주변상황을 확인함으로써 이동 로봇을 정확하게 제어할 수 있었다.
Abstract In this paper, using Zigbee-based wireless sensor networks and Lego MindStorms NXT robot, a remote monitoring and navigation system for mobile robot has been developed. Mobile robot can estimate its position using encoder values of its motor, but due to the existing friction and shortage of motor power etc., error occurs. To fix this problem and obtain more accurate position of mobile robot, a ultrasound module on wireless sensor networks has been used in this paper. To overcome disadvantages of ultrasound which include straightforwardness and narrow detection coverage, we rotate moving node attached to mobile robot by 360 ° to measure each distance from four fixed nodes. Then location of mobile robot is estimated by triangulation using measured distance values. In addition, images are sent via a network using a USB Web camera to smart phone.
On smart phones we can see location of robot, and images around places where robot navigates. And remote monitoring and navigation is possible by just clicking points at the map on smart phones.
Key Words : Wireless Sensor Network, Remote navigation, Smart Phone
*정회원, 청운대학교 인터넷학과
**종신회원, 청운대학교 컴퓨터학과 (교신저자)
***준회원, 청운대학교 정보산업대학원
****정회원, 중부대학교 컴퓨터학과
*****종신회원, 동서울대학교 정보통신공학과
접수일자 2011.10.18, 수정완료 2011.11.28 게재확정일자 2011.12.16
Ⅰ. 서 론
최근 스마트폰의 보급이 급격히 증가하고 있으며, 아
이폰, 안드로이드, 바다 등 다양한 스마트폰 OS가 존재 하여 원격제어 시스템에도 변화가 생기기 시작하였다.
과거 시스템의 제어방식은 서버에서 직접 장비를 제어하
는 중앙 제어방식 또는 장비를 일대일로 제어하는 방식
을 주로 사용하였다. 이러한 제어방식은 시스템을 확장
하거나 이전할 때 드는 설치비용과 유지보수 비용이 더
많이 들었다
[1,2]. 또한 사용자가 직접 상주하여 모니터링
을 해야 하는 시공간적 제약을 받게 되었다. 이렇게 기존
제어방식에서 벗어나, 시공간적 제약을 받지 않는 스마
트폰을 이용한 원격 로봇 제어 시스템에 대한 연구가 활 발히 진행 중이다. 또한 통신기술과 로보틱스 기술의 융 합에 의한 네트워크 로보틱스 연구가 활발히 이루지고 있다
[3][4].
본 논문에서는 네트워크를 통해 스마트폰으로 주어진 공간의 이동로봇을 원격으로 제어 하고, USB웹 카메라 를 통해 영상을 실시간으로 스마트폰에서 확인할 수 있 도록 구현하였다. 또한 이동로봇의 정확한 위치를 확인 하기 위하여, 무선센서 네트워크와 초음파 센서를 사용 하는 방법을 제안하였다. 서버와 클라이언트로 나눠져서 서버에서는 영상처리 및 로봇제어, 그리고 무선센서 네 트워크를 통한 초음파 측정하여 위치를 인식하고, 클라 이언트(스마트폰)에서는 소켓을 통해 넘어온 데이터 값 들을 어플리케이션 화면에 나타내고 로봇 제어 신호를 서버로 송신하는 역할을 하도록 구현하였다.
Ⅱ. 이동로봇의 원격 주행 제어시스템
1. 원격 시스템 구성도
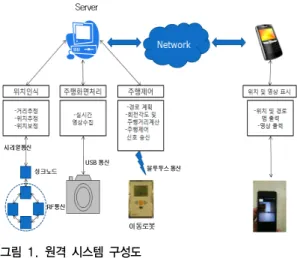
본 논문에서는 다음과 같은 시스템을 구성하고, 각 구 성요소들의 개요를 그림 1와 같이 구성하였다.
그림 1. 원격 시스템 구성도
Fig. 1. Configuration of Remote system
시스템은 크게 서버와 클라이언트(스마트폰)로 나누 어 진다. 서버는 위치 인식부, 주행화면 처리부, 주행 제 어부의 세 부분으로 나뉜다. 위치 인식부는 USN의 각 모 트로 구성된 노드로부터 초음파 측정값, 이동로봇과 연
동된 이동 노드(blind node)의 위치 값, 센서 정보 등을 컴퓨터와 연결된 싱크 노드(sink node)를 통해 시리얼 통 신으로 전달받아 측정된 초음파 값을 삼각 측량기법을 이용하여 위치 값을 추출하여 주행제어부와 네트워크를 통해 클라이언트로 넘겨준다. 주행제어부는 이동로봇의 모터에 내장된 회전 센서 값으로 로봇의 처음 위치로부 터의 움직임 궤적을 계산하여 현재 위치 좌표를 계산하 고 이 값을 USN에 의한 위치 좌표와 비교하여 보정한다.
이동 로봇의 주행은 스마트 폰의 터치 위치 좌표에 의해 이동한다. 이동로봇의 움직임을 제어하는 신호를 로봇으 로 보내고, 로봇은 현재 위치로부터 다음 이동해야 할 좌 표까지의 거리와 각도를 계산하고, 이동을 시작한다. 주 행화면처리부는 로봇에 장착된 웹카메라로부터 영상 데 이터를 수신 받는다. 수신 받은 데이터는 네트워크를 통 해 클라이언트로 전송하기 위한 스트림 과정을 하고, 생 성된 데이터스트림을 전송한다. 그림 2는 전체 시스템의 흐름도를 나타낸다.
그림 2. 시스템 흐름도
Fig. 2. System Flow Diagram
서버와 클라이언트가 서로 네트워크 소켓이 연결이 되면, 클라이언트는 서버로 이동로봇 제어신호를 전송한 다. 서버에서는 네트워크 소켓을 통해 클라이언트로부터 이동로봇 제어신호를 수신하고 이동로봇을 주행 시킨다.
동시에 웹 카메라로부터 영상 데이터를 수신한다. 이동
로봇이 자체 인식방법으로 좌표에 이동한 후 로봇에 장
착된 초음파 센서 모듈을 360° 회전시켜서 각각의 고정
된 좌표에 있는 노드들로부터 초음파 거리 값을 측정하
고, 측정된 값을 가지고 삼각 측량기법을 이용하여, 현재
이동로봇 위치 값을 추출한다. 초음파 센서로 인한 측정
된 값과 이동로봇의 자체 인식값과 비교하여, 이동로봇
의 위치와 방향각을 보정 시킨다. 보정된 위치 값과 웹
카메라로부터 수신 데이터를 네트워크를 통하여 클라이
언트로 송신한다. 클라이언트는 송신된 위치 값은 스마 트 폰 원격 제어 애플리케이션에 현재의 로봇위치와, 서 버로부터 전송받은 영상을 출력시킨다.
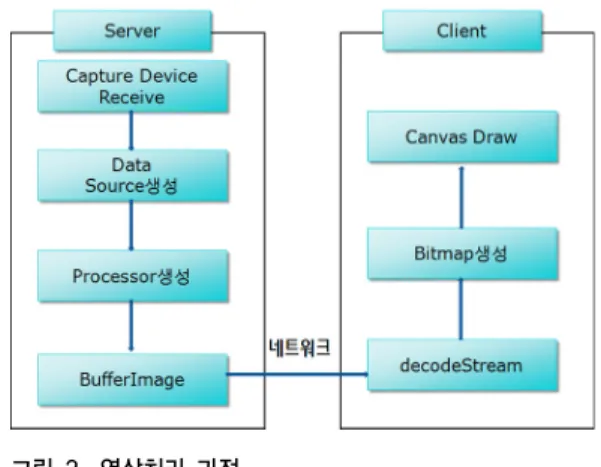
2. 영상 송수신
서버에서는 웹 카메라로부터 영상을 수신 받기 위해 클라이언트(스마트 폰)로 전송 하는 과정을 그림 3에 나 타내었다.
그림 3. 영상처리 과정
Fig. 3. Image Processing Procedure
서버에서는 JMF의 CaptureDevice 객체로부터 영상 캡처가 가능한 디바이스 정보를 획득한다. 디바이스 정 보는 현재 사용가능한 영상의 크기, Format 방식, 영상의 데이터 버퍼등의 정보가 들어있다. 이러한 정보를 가지 고 비디오 테이프의 개념과 같은 DataSource 객체를 생 성하게 된다. DataSource는 Player 객체나 Processor 객 체를 생성 시 인자값으로 사용되며, 멀티미디어 데이터 에 대한 위치정보, 전송 관한 정보를 나내고 있다.
Processor는 미디어 스트림을 전송하는 수단으로 데이터 소스에서 생성된다. 이 과정에서 전송을 위한 포맷 방식 및 ContentType이 결정되며, 전송될 미디어의 특성이 결정된다. 기본적으로 실시간 영상 데이터를 전송하기 위해서는 RTP방식을 사용하지만, 스마트 폰과의 호환성 을 위해서 BufferImage방식으로 사용하였다.
BufferImage는 데이터 영상들을 Image 형태로 변환 하여, 연속된 이미지를 Buffer 크기 만큼, 네트워크를 통 해 스마트 폰으로 전송한다. 스마트 폰은 네트워크를 통 해 들어온 스트림 데이터를 decodeStream 메소드로부터
Bitmap객체를 생성한다. 그리기 객체인 Canvas의 drawBitmap 메소드를 호출함으로써 Bitmap 객체에 들 어있는 이미지를 연속적으로 화면에 출력해줌으로써, 움 직이는 영상을 표현한다. 실시간으로 스트림 데이터가 수신되므로, 실시간으로 영상은 출력이 된다.
III. 위치인식 제어시스템
1. 위치인식 방법
자율 이동로봇의 가장 중요한 것은 자신이 가야할 위 치에 정확하게 가는 것이다. 이를 위해서 현재 위치를 인 식하는 방법들이 많이 연구가 되었다. 위치인식 방법으 로는 로봇 바퀴에 회전수를 측정하는 회전 센서(Encoder) 를 장착하여 초기의 위치로부터 자신의 위치를 추정하는 방법이 있는데, 이 방법은 센서의 측정 오차와 미끄러짐 등에 의해 오차가 누적되어 장시간 주행 시 심각한 문제 발생된다. 또한 GPS를 이용하는 방법이 있는데, 이 GPS 는 실내에서 사용이 불가할 뿐만 아니라, 위치 추정 오차 가 큰 단점이 있다. 또한 태그, 안테나, 리더로 구성되는 RFID 시스템을 사용할 경우는 사용하는 태그의 증가로 인해 설치 비용이 증가하고 동일 태그로부터 위치정보가 중복 수신되는 문제가 발생한다
[5].
이동로봇의 정확한 위치를 측정하기 위해 본 논문에 서는 초음파를 이용한 TOA(Time of Arrival)방식과 삼 각측량법을 사용하였다. TOA란 전파가 송신 측에서 출 발하여 수신 측에 도달할 때 까지의 시간을 측정한 후, 그 시간에 전파의 전송속도를 곱하여 거리를 계산하는 방식을 의미한다. TOA는 전파의 속도가 낮을수록 그 정 확도가 올라가므로 빛의 속도에 가까운 RF신호보다 초 음파와 같이 그 속도(340 m/s)가 낮은 전파를 이용하여 거리를 구한다 송신기에서 출발된 초음파 신호가 수신기 에 수신될 때까지 걸린 시간이 t(sec)이면 소리의 속도, v 는 340(m/s, 기온 15℃에서)이므로 초음파 센서 노드 간 의 거리, S는 다음 식 (1)과 같다.
𝑺 =𝒗 × 𝒕 = 340 ×𝒕 (1)
식 (1)에서 소리의 속도는 공기의 온도에 따라 변하게 된다. 따라서 다음 식 (2)에 의해 적절하게 계산될 수 있다.
𝒗 = 331.5 + 0.6𝑻 (2)
여기서, T는 온도이다. 또한 초음파 센서는 직진성이 성질과 지향각이 좁은 것이 단점이다. 삼각측량법 (Triangulation)은 위치를 계산하는 방식 중에서 가장 많 이 이용되는 방법이다. 각 노드로 부터 측정된 정확한 값 만 있다면, 현재 위치를 정확하게 측정할 수 있다. 삼각측 량법을 이용하여 좌표가 알려진 기준 노드(reference nodes)들과 위치를 계산하고자 하는 이동 노드간의 거리 를 각각 측정하고, 이를 바탕으로 이동 노드의 위치를 계 산할 수 있다.
삼각 측량법을 이용하여 이동 노드의 위치를 정확히 인식하기 위해서는 기준 노드와 이동 노드 간의 거리를 정확히 측정하여야 한다. 초음파는 실내에서 거리 측정 하는데 높은 정확도를 가지지만 이러한 정확도를 얻기 위해서는 지향각이 좁은 초음파 신호가 가지는 직진성으 로 인해 송신측과 수신측이 일치하도록 서로 마주봐야 한다.
2. 초음파 센서모듈
본 논문에서는 이동로봇의 위치 인식을 위해 한백전 자의 ZigbeX와 초음파 센서 옵션 모듈(UltraSonic Ⅱ)을 사용하였다. ZigbeX는 ZigBee 기반의 무선 센서 네트워 크 패키지로 8개의 모트와 각종 옵션 센서 보드로 구성되 어 있다. 각각의 ZigbeX 모트는 마이크로 컨트롤러 (ATmega 128L)무선 통신 칩(CC2420), 기본 센서(온도, 습도, 조도), 안테나 등으로 구성되어 있다. 사용된 ZigbeX모트와 초음파 센서 옵션 모듈의 실물은 그림 4와 같다.
그림 4. ZigBex 모트와 초음파 센서 모듈
Fig. 4. ZigBex Mote and Ultrasonic sensor module
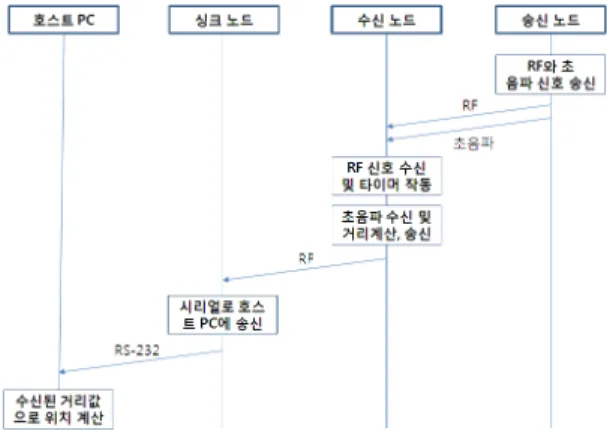
센서 네트워크 모트에 초음파 센서 모듈이 장착된 각 노드에서의 거리 측정 동작 원리는 다음 그림 5와 같다.
각 노드는 0 이상의 아이디(ID)를 부여받는다. 0번 노드 는 싱크(sink) 노드로서 수신된 노드 간의 거리 정보를 시리얼(serial)로 호스트 PC로 전송하고, 1∼9 사이의 아 이디를 가지는 노드는 수신기가 되어 초음파 신호를 수 신하며 10 이상의 아이디를 가지는 노드는 송신기로 작 동한다. 송신 노드는 1초마다 RF를 통해 수신 노드에게 지금 초음파를 전송할 것이라고 알린다. 수신 노드는 RF 메시지를 통해 송신 노드가 초음파를 전송함을 알고, 초 음파 모듈을 작동(On) 시킨다. 그리고 타이머를 동작시 켜 얼마만큼의 시간 후에 초음파가 자신에게 도착했는지 측정한다. 송신 노드는 RF 메시지 전송이 끝나면 바로 초음파 모듈을 작동시켜 초음파를 전송한다. 수신 노드 에 초음파가 도달하는 시간은 거리에 따라 증가하므로 타이머를 통해 송신 노드와의 거리를 계산할 수 있다. 수 신 노드는 계산된 거리 값을 싱크 노드에게 RF로 전송한 다. 싱크 노드는 거리 값을 보낸 수신 노드의 아이디(ID) 와 거리 값을 시리얼을 통해 호스트 PC로 전달한다. 측 정된 거리 정보를 이용하여 호스트 PC에서 이동로봇의 위치를 삼각측량법에 의해 구한다.
그림 5. 초음파 센서 모듈의 동작 원리
Fig. 5. Action principle of Ultrasonic sensor module
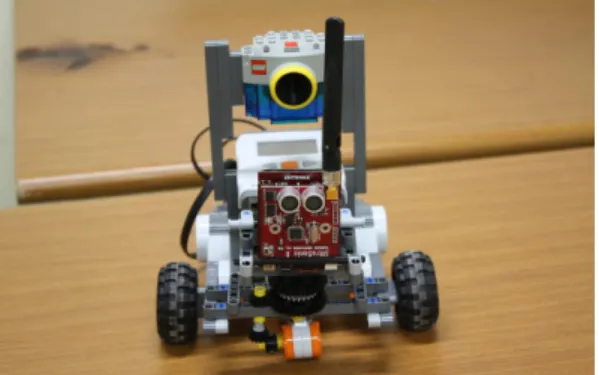
3. 이동로봇 주행 알고리즘
본 논문에 사용된 로봇은 LEGO사의 MindStorms
NXT를 사용하였다. LEGO Mindstorms NXT는 교육용
제품으로 기본적으로 32bit ARM7 마이크로 프로세서가
장착된 NXT 브릭(Brick), 8bit 인터렉티브 서보 모터
(Interactive Servo Motor), 음향, 초음파 및 다양한 센서
로 구성되고 블루투스 커뮤니케이션, 멀티 다운로드 기 능들을 가지고 있다. 중앙 제어부인 NXT 브릭은 입력포 트 4개 와 출력포트 3개를 통해 각종 센서 입력값과 제어 신호를 주고 받으며, 인터렉티브 서보 모터 는 속도와 거 리를 측정하는 회전센서가 내장되어 1도 단위의 정확한 모터 제어가 가능하고 각종 기어와 연결 블록으로 이루 어진 동작부에 실제적인 제어를 행하는 부분이다. 그림 6 은 본 논문에서 사용하기 위해 LEGO Mindstorms NXT 를 이용하여 구현한 이동로봇의 외형이다. 구현된 로봇 을 제어하기 위한 프로그램은 Mindstorms NXT를 위해 JAVA 언어로 개발된 Lejos NXT 펌웨어를 사용하였고, 블루투스를 통해 NXT로 전송하여 제어하였다.
그림 6. 자율 이동로봇의 외형
Fig. 6. Appearance of Autonomous Mobile
본 논문에서는 이동 로봇의 모터에 내장된 회전 센서 값으로 로봇의 처음 위치로부터의 움직임 궤적을 계산하 여 현재 위치 좌표를 계산하고 이 값을 무선 센서 네트워 크의 초음파 센서 노드에 의한 위치 좌표와 비교하여 이 동 로봇의 위치와 방향각을 보정한다. Mindstorms NXT 의 서보모터에는 포토커플(Photo-couple)을 이용한 회전 센서가 내장되어 있으며, 분해능은 1° 이고 ±1° 의 작동 오차를 가진다. 회전 센서의 값은 모터의 이동이나 회전 에 따라 값이 감소하거나 증가하고 임의로 값을 지정하 거나 초기화할 수 있다. 그리고 초기화된 이후에 바퀴의 회전에 따라 값이 실시간으로 나타내므로, 회전량을 알 수 있다. 구현된 이동로봇은 5.6×2.6(지름×폭)cm 크기의 바퀴를 사용하였다. 시간 𝑡에 바퀴의 회전에 따른 회전 각, ∆ℴ(° )와 이동거리,∆𝑑 (cm)의 관계식은 식 (3)와 같다.
∆ 𝑑 = π × R × ∆θ/360 (3) 𝑑 (𝑡 +1) = 𝑑 (𝑡 ) + ∆𝑑
θ( 𝑡 +1) = θ(t) + ∆θ
여기서, R은 로봇 바퀴의 지름이다.
로봇의 이동에 따른 위치 좌표는 다음 식(4)로 정의한다.
(4)
여기서,
와
는 관측시각 t 에서 나타나는 로 봇의 좌표이고,
는 로봇의 방향각으로 로봇의 전방 이 절대 좌표계의 x축과 이루는 각도이다[10].
로봇의 이동에 따른 위치와 방향의 변화는 회전이 있 는 경우와 회전이 없는 경우에 대해 각각 다음 식(5)∼
(10)에 의해 구한다. 로봇의 회전은 좌표 값의 계산을 단 순하게 하기위해 한쪽 바퀴를 고정시키고 다른 쪽 바퀴 만을 구동하는 스윙 턴(swing turn)으로 동작하게 하였다.
회전 운동이 있는 경우
(5)
(6)
× ×
(7)
회전 운동이 없는 경우(직진의 경우)
×
(8)
×
(9)
(10)
따라서 절대 좌표계 내에서 로봇의 이동에 따른 로봇 의 위치와 방향각은 다음 식(10)에 의해 추정된다.
(11)
식(11)에 의해 추정된 이동 로봇의 위치는 명령어 실 행 시 아주 작은 시간 간격동안 더 움직이거나 관성이나 마찰력 같은 물리적 특성으로 인해 바로 정지하지 않고 밀림 등으로 오차가 발생한다. 특히, 로봇이 빠르게 움직 이거나 무게가 무거운 경우는 더 많이 밀리게 된다.
이동로봇의 주행을 제어하기 위한 프로그램은 JAVA
언어인 Lejos의 iCommand API를 사용하였다. 이동 로
봇은 회전 센서로부터 얻은 데이터를 Pilot 클래스와
TachoNavigator클래스가 제공하는 함수를 이용하여 자 체적으로 자신의 위치와 방향각을 계산한다.
TachoNavigator 클래스는 Navigator 인터페이스 (Interface)를 구현하며, 로봇의 임의의 지정한 좌표(x,y) 로 이동할 수 있으며, 이동 방향을 제어할 수 있는 다양 한 메소드를 갖고 있다. 그림 7은 이동 로봇의 주행 개념 도를 나타 낸 것이다.
그림 7. 이동로봇 주행 개념도
Fig. 7. Conception diagram of Mobile Robot
그림 7에서 보는 것과 같이 이러한 오차를 보정하기 위해 회전 센서에 의한 이동로봇의 위치 좌표를 초음파 센서에 의한 위치 좌표로 갱신하고 다음과 같이 방향각 을 수정하였다.
․Ⅰ,Ⅱ 사분면의 경우(0°∼180°)
수정된 로봇 방향각 : ℴ “ =atan2
′ ′
(12)
․Ⅲ,Ⅳ 사분면의 경우(180°∼360°) 수정된 로봇 방향각 : ℴ “ =atan2
′ ′
(13)
IV. 시뮬레이션 및 결과분석
본 논문에서 스마트 폰에 애플리케이션을 적재하여 사용하기 이전에 구글에서 제공하는 안드로이드 스마트 폰 애뮬레이터로 테스트를 하고, 스마트 폰에 애플리케 이션을 적재하여 실험하였다. 안드로이드는 제한된 화면 의 크기로 인하여 영상과 함께 출력이 어렵다. 물론 같이
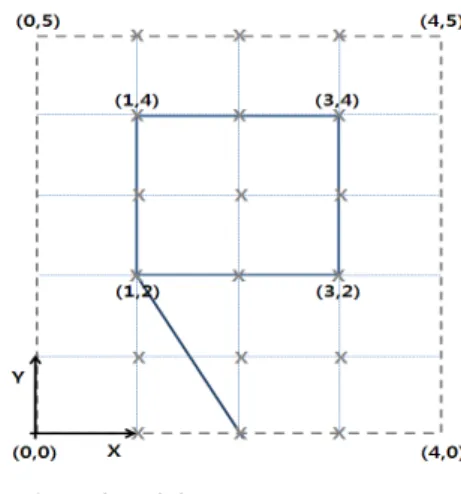
표현을 할수 있지만, 그렇게 되면 화면의 축소 및 영상의 크기가 작아져서, 알아보기 힘들었기에, 두 개의 Activity 를 만들어서, 맵을 메인 Activity 영상을 SubActity로 하 여 서로 체인지 하는 방식을 사용하였다. 사용된 스마트 폰은 LG OptimusQ로 안드로이드 2.1버젼을 사용하고, 해상도가 480 x 800이다. 애뮬레이터도 실제 스마트 폰과 같게 설정하였다. 또한 무선 센서 네트워크와 초음파 센 서에 의한 이동로봇 위치 인식과 이를 기반으로 한 이동 로봇의 주행 시스템 평가를 위해 실험실 내에 4×5(m2)의 실험 공간을 만들고 2차원 직교 좌표를 할당하였다. 할당 된 직교 좌표의 (0,0), (4,0), (0,5), (4,5) 위치에 4개의 고정 노드를 설치하였다. 이동 로봇의 전면에 부착된 이동 노 드는 360o 회전하며 1초마다 초음파 신호를 각 고정 노드 로 송신하여 거리를 측정한다. 먼저 초음파 센서에 의한 위치 인식 실험을 위해 그림 8과 같이 좌표 평면 상에
×로 표시된 고정 위치에 초음파 센서를 두고 각 위치의 좌 표를 인식하였다. 또한 제안된 위치 인식 방법을 이용하 여 이동 로봇의 주행을 실험하기 위해 좌표 평면의 중심 을 순회하는 경로를 지정하였고 출발 지점은 (2,0) 위치 로 하였다. 이동 로봇의 제어를 위한 프로그램은 Mindstorms NXT를 위해 개발된 JAVA 프로그래밍 기 법인 iCommand 방식을 사용하여 작성하였다. 이 방식은 개별적인 iCommand 코드를 무선으로 NXT에 전송하여 NXT 브릭을 제어하는 방식으로 블루투스 무선 통신을 사용한다. 이동 로봇은 회전 센서로부터 얻은 데이터를 icommand API가 제공하는 함수를 이용하여 자체적으 로 자신의 위치와 방향각을 계산한다. 방향각은 극좌표 로 주어진다.
그림 8. 좌표 평면
Fig. 8. Coordinate Plane
각각의 일정한 좌표를 맵 화면에 터치를 하면 안드로 이드는 그 위치의 값을 네트워크를 통해 서버로 전송하 고, 이동로봇으로 제어 신호를 보냄으로써 이동로봇이 이동하는 것을 확인하였다. 이동로봇의 자체 인식은 정 확한 위치로 갔다고 인식이 되지만 초음파 센서로 인한 측정 시 위치 좌표에서 벗어나는 경우에 초음파 센서에 의한 위치 보정 방법을 사용하여, 목표 지점에 거의 정확 하게 이동한 것을 확인하였다. 이동로봇에 장착된 USB 웹캠으로부터 영상을 실시간으로 받아 JMF(Java Media Framework)를 이용하여, RTP(Real Time Transport)방 식으로 네트워크를 통해 스마트폰으로 전송을 하고, 전 송받은 데이터로부터 영상출력하는 것을 애뮬레이터를 통해 확인할 수 있었다. 스마트 폰에 직접 에플리케이션 적재하여 실행하였을 때 그림 9, 그림 10과 같이 이동로 봇이 구동하는 것을 확인하였다.
그림 9. 스마트 폰 맵 화면
Fig. 9. Smart phone Map Screen
그림 10. 스마트 폰 주행 화면
Fig. 10. Smart phone Navigation Screen
Ⅴ. 결 론
최근에 이동로봇의 원격 주행제어 시스템은 스마트폰 으로 확대되고 있다. 본 논문 에서는 최근 사람들에게 많 이 보급된 스마트 폰에 모바일 네트워크를 통한 원격 제 어 애플리케이션을 탑재하여 이동로봇의 원격 제어가 가 능하게 하였다. 언제, 어디서든 스마트폰을 통해 실내의 로봇 주변 상황을 실시간으로 확인 가능하게 하였고, 이 동로봇을 제어하여, 돌발상황 발생시 그 위치로 이동하 여, 바로 확인가능하게 되었다. 본 시스템은 기존의 유선 망 방식보다 스마트폰과 이동통신망을 이용함으로써 사 용자 편의성과 효율성이 좋고, 시스템 유지보수 비용의 감소 등의 기대 효과를 가져왔다. 또한 무선 센서 네트워 크의 초음파 센서를 이용하여, 이동로봇 위치를 인식할 수 있게 하였고, 조도·습도등 다양한 옵션들을 활용하여, 집안의 환경, 돌방상황들을 감지하여, 이동로봇의 자율적 으로 이동 가능하도록 하고, USB웹카메라를 통하여 스 마트 폰으로 화면을 제공 함으로써, 보다 사용자 편의성 을 증대시킬 수 있다. 향후 이 시스템으로 언제 어디서든 서버에 접속하여, 현재 실내 감시 및 환경 변화 등을 확 인하고, 무인 경비 로봇 및 방범․방재 시스템에 응용할 수 있을 것으로 기대된다.
참 고 문 헌
[1] 김재생, 이정식 “모바일 기반의 서버/클라이언트간 원격제어시스템의 구현”, 한국콘텐츠학회, 한국콘 텐츠학회논문지, 제10권 제6호, pp 106-114 2010.6 [2] 전수용, 박영수 "스마트폰의 기술동향 및 군적용 방안“ 한국통신학회, 한국통신학회지(정보와통신), 제28권 제4호 , pp 28-34 2011.3
[3] S. I. Roumeliotis, G. A. Bekey, "Bayesian estimation and Kalman filtering: a unified framework for mobil robot localization," Robotics and Automation, Proc. ICRA. IEEE International Conference on, vol. 3. pp. 2985-2992. April 2000.
[4] 김홍준, 김병국, “모바일 센서 네트워크를 위한 에
너지 효율적이고 경제적인 소형 이동 로봇의 개
발,” 제어․로봇․시스템학회 논문지, 제14권 제3
호, pp. 284-294, 2008.
저자 소개
박 종 진(정회원)
∙제11권 2호 참조
∙2011년 현재 청운대학교 인터넷학과 교수.
<주관심분야 : 지능시스템, 임베디드시 스템, 인터넷 프로그래밍>
최 규 석(종신회원)
∙제9권 6호 참조
∙2011년 현재 청운대학교 컴퓨터학과 교수
<주관심분야 : 인공지능,이동통신,이동 컴퓨팅>
천 창 희(준회원)
∙2009년 청운대학교 인터넷학과 졸업
∙2011년 동 대학원 석사
<주관심분야 : 지능시스템, 임베디드시 스템, 자바프로그래밍>
박 인 규(정회원)
∙제10권 5호 참조
∙2011년 현재 중부대학교 컴퓨터학과 교수
<주관심분야 : 영상처리, 인공지능>
강 정 진(종신회원)
∙1991년 3월 - 2011년 12월 현재 동서 울대학교 정보통신과 교수
∙2007년 2월 - 2010년 2월 미시간주립 대학교 전기컴퓨터공학과 교환교수
∙1991년 8월 - 2005년 8월 건국대학교 전자정보통신공학과 외래교수(대학 원 및 학부, 강의 및 논문지도)
∙2011년 현재 Marquis Who's Who in the world 인명록 등재
<주관심분야 : Smart & Cloud Convergence, RFID/USN, Smart device, Mobile Communication & Computing, Antenna & Electromagnetic Wave, Intelligent Control>
※ 본 논문은 2011학년도 청운대학교 교내연구비에 의하여 지원되었음.