간략화 된 SVPWM을 적용한 4-Switch 3-Phase Inverter의 제어 방법
손상훈*․박영주*․최익**
Four-switch Three-phase Inverter control method applied by simplified Space Vector PWM
Sang-Hun Son*․Young-Joo Park*․Ick Choy**
요 약
6스위치 3상 인버터(SSTPI)의 한 상을 스위치 대신 커패시터로 대체한 4스위치 3상 인버터(FSTPI)에서 커패 시터 전압의 불평형으로 인한 출력 전압의 오차를 보상하는 방법과 전압 제어 방법은 FSTPI의 성능을 결정짓는 중요한 요소이다. 본 논문에서는 DC 오프셋 전류 주입 통한 FSTPI의 커패시터 전압의 불평형을 보상하는 새로 운 방법과 FSTPI의 새로운 전압 제어 방법인 간략화 된 SVPWM을 제안한다. 제안된 방법은 FSTPI로 SPMSM 를 구동하는 시뮬레이션과 실험을 통해 그 타당성을 검증하였다.
ABSTRACT
The performance of 4-switch 3-phase inverter(: FSTPI) which replace two switches of 6-switch 3-phase inverter(: SSTPI) is mainly affected by the compensator unbalanced voltages and output voltage control method. This paper proposes a DC offset current injection method to compensate the capacitor unbalanced voltages for FSTPI. A simplified SVPWM method which can be applied to FSTPI is also proposed. The validity of the proposed methods is verified by simulation and experiment using SPMSM.
키워드
Four-Switch Three-Phase Inverter, Unbalanced Capacitor Voltages, DC Offset Current Injection, Simplified SVPWM 4스위치 3상 인버터, 커패시터 불평형 전압, DC 오프셋 전류 주입, 간략화 SVPWM
* 광운대학교 대학원 로봇학과([email protected], [email protected])
** 교신저자: 광운대학교 로봇학부 ㆍ접 수 일 : 2016. 01. 28 ㆍ수정완료일 : 2016. 03. 13 ㆍ게재확정일 : 2016. 03. 24
ㆍReceived : Jan. 28, 2016, Revised : Mar. 13, 2016, Accepted : Mar. 24, 2016 ㆍCorresponding Author : Ick Choy
Kwangwoon University Dept. of Robotics Email : [email protected]
Ⅰ. 서 론
전력변환장치의 에너지 변환 효율을 높이고 비용 감소를 위한 연구는 지속적으로 진행되고 있으며, 그 중 하나는 4스위치 3상 인버터(FSTPI : Four-Switch Three-Phase Inverter)에 관한 연구이다[1-2]. FSTPI
는 3상 전동기 구동[3-5]에 사용되는 6스위치 3상 인 버터(SSTPI : Six-Switch Three-Phase Inverter)에 세 개의 상하 스위치 중 한 개의 상하 스위치를 그림 1과 같이 커패시터로 대체한 구조로 출력 전압의 크 기와 주파수를 동시에 가변할 수 있고 스위칭 손실이 적다는 장점이 있다.
http://dx.doi.org/10.13067/JKIECS.2016.11.3.283
그러나 FSTPI는 직류 링크 중성점 전류의 흐름에 따라 커패시터 전압의 맥동이 발생하고 이로 인해 출 력 전압 벡터가 변하게 되어 출력 전압과 전류의 전 고조파 왜곡(THD : Total Harmonic Distortion)이 증 가하게 된다. 이런 단점을 보완하기 위해 커패시터 전 압의 맥동을 보상해주는 방법은 FSTPI의 성능을 결 정하는 중요 요소이다[6-9].
또한 일반적으로 FSTPI의 전압을 제어하는데 사용 되는 공간 벡터 전압 변조 방법(SVPWM : Space Vector Pulse Width Modulation)은 주어진 직류 전압 하에서 가장 큰 교류 전압을 얻을 수 있지만 계산이 복잡하고 구현이 어렵다는 단점을 가지고 있어 다양 한 분야에서 간략화시킨 SVPWM에 대한 연구가 진 행되고 있다[9-11].
본 논문에선 커패시터 중성점의 평균 전압을 측정 하고, 이를 사용하여 커패시터 전압의 맥동을 최소화 시키는 DC 오프셋 전류 주입 방법과 FSTPI에 적용 시킨 간략화 된 SVPWM을 제안한다. 제안한 방법은 FSTPI로 SPMSM을 구동한 시뮬레이션과 실험을 통 해 그 타당성을 증명하였다.
va
vb
vc
Sa Sb
c n
vdc
vct
vcb
a b
C
C SWtop
SWbot
그림 1. FSTPI의 구조 Fig. 1 Structure of FSTPI
Ⅱ. FSTPI의 출력 전압 제어 2.1 SVPWM에 의한 FSTPI 출력 전압 제어 FSTPI의 출력 전압을 제어하는 일반적인 방법은 공간 벡터 전압 변조 방법(SVPWM)이다[9]. 그림 1 과 같은 구조의 FSTPI에서 상마다 상보적으로 작동 하는 스위치의 동작에 따라 인버터의 출력 전압은 달 라지게 된다. c상 상하 커패시터의 전압이 라
가정하였을 때 스위치 상태에 따른 FSTPI의 출력 전 압벡 터는 표 1과 같이 4개의 벡터로 표현된다.
Voltage vector
Switching
Voltage (V)
0 0
0 1
1 0
1 1
표 1. 출력 전압 벡터 Table 1. Output voltage vector
FSTPI의 경우 영 벡터가 존재하지 않기 때문에 그 림 2와 같이 크기가 같고 방향이 반대인 출력 전압 벡터 나 를 같은 시간 인가해서 영 전압 벡 터로 사용한다. 영 벡터를 설정한 후 지령 전압 벡터 의 해당하는 출력 전압 벡터와 영 전압 벡터를 조합 하여 사용하면 SVPWM을 구현할 수 있다.
그림 2. 출력 전압벡터 도표 Fig. 2 Output voltage vector diagram
2.2 제안하는 간략화 된 SVPWM 방법
SVPWM은 주어진 직류 전압 하에서 가장 큰 교 류 전압을 얻을 수 있다는 장점이 있지만 계산 시간
이 길고 구현이 복잡하다는 단점을 가지고 있다. 이런 단점을 보완하기 위해 간략화 된 SVPWM의 연구가 진행되고 있다[9-11]. 본 연구에선 순시적으로 변하는 커패시터 전압을 적용하여 FSTPI에 적용된 간략화 된 SVPWM을 제안한다.
그림 1과 같이 FSTPI는 3상을 스위치 동작을 통 해 직접적으로 제어 가능한 SSTPI와는 달리 직접적 으로 제어가 가능한 상은 a, b상이고, c상의 전압은 스위치의 동작이 아닌 a, b상 전압으로 인해 결정된 다. 결국 3상 지령 전압을 직접적으로 제어가 가능한 a, b상에 대한 전압 지령으로 바꿔준다면 좌표 변환 없이 간단한 방법으로 SVPWM 구현이 가능하다[9].
c상의 전압이 일 경우, 각 상의 지령 전압인
를 a, b상의 전압으로 표현한 새로운 지령 전 압 은 식(1)에서 식(3)과 같다. 식(1)에서 식 (3)과 같이 새로운 지령 전압을 생성해도 a, b, c상에 인가되는 전압은 기존 지령 전압과 같아진다.
(1)
(2)
(3)
그러나 인버터의 특성상 c상의 전압은 로 유 지될 수 없고, 이로 인해 상전압에 왜곡이 생기게 된 다. 이런 문제점을 해결하기 위해선 c상의 전압인 하 단 커패시터의 전압 를 순시적으로 측정하여 지령 전압에 추가해주어야 한다. c상의 순시 전압을 추가한 새로운 지령 전압은 식(4, 5)와 같다.
(4)
(5)
a, b상의 전압으로 바꾼 식(4, 5)를 이용해서 상에 인가할 전압의 듀티를 구하면 식(6, 7)과 같다.
(6)
(7)
식(6),(7)에서 x는 a, b상을 의미하고 T는 샘플링 주기를 이야기한다. 제안하는 방법으로 SVPWM을 구현할시 지령전압에 따른 구역계산과 삼각함수 계산 없이 FSTPI에서 SVPWM을 구현할 수 있다.
2.3 간략화 된 SVPWM의 과변조 기법
입출력의 선형성을 보장하는 전압의 범위를 넘어가 는 과변조 영역에서 출력 전압의 안정화를 위해 과변 조 기법이 필요하다. FSTPI에서 과변조 현상이 일어 나는 경우는 그림 2의 출력 전압벡터의 범위를 넘어 가는 경우이다. 지령전압이 일정할 경우 FSTPI에서 출력할 수 있는 최대 전압 크기는 식(8)과 같다.
max
(8)
인버터를 구동하기 위한 3상 지령 전압을 표현하면 식(9)에서 식(11)과 같다.
sin (9)
sin
(10)
sin
(11)
본 논문에서 제안한 간략화 된 SVPWM의 새로운 지령 전압으로 표현하면 식(12, 13)과 같다.
sin
(12)
sin
(13)
그림 3과 같이 지령 전압에 를 초과하거나 미 만인 경우 과변조현상이 일어나게 된다. 이를 보상하 기 위한 방법은 식(14, 15)와 같다.
i f
(14)
i f
(15)
여기서 은 각각 지령 전압이 를 넘을 경우와 보다 작은 경우이고, 은 과변조 현상
시 보상 해줄 스케일 팩터를 의미한다. 두 개의 스케 일 팩터를 비교하여서 더 작은 값을 식(16)과 같이 지령전압에 보상해준다. 식(16)의 는 a나 b를 의미 한다.
(16) 위와 같이 과변조 기법을 사용할 경우 다른 상의 지령전압을 비례적으로 감소시켜줌으로 전압 왜곡을 상대적으로 크게 감소시킬 수 있다.
Ⅲ. FSTPI의 커패시터 전압 불평형 보상 방법
3.1 FSTPI의 커패시터 전압 불평형 해석 FSTPI는 커패시터 전압이 불평형할 때 지령 전압 을 인가하면 입출력 상호간의 선형성이 유지되지 않 아 원하는 출력전압을 얻을 수 없다. 따라서 FSTPI 의 성능을 좌지하는 중요 요소는 상하 커패시터 전압 의 불평형 문제를 해결하는 방법이다[6-9].
그림 3. 커패시터 전압 파형 Fig. 3 Capacitor voltage waveform
그림 3은 FSTPI의 커패시터 전압 불평형 해석을 위한 그림이다. FSTPI의 상하 커패시터의 전압은 커 패시터 중성점에 흐르는 전류 에 따라 변하게 된다.
상단 커패시터 전압을 , 하단 커패시터 전압을
라 하고, 각 커패시터의 용량 C를 같은 값으로 설정 하면 커패시터의 흐르는 전류 는 식(17)과 같다.
(17)
인버터의 특성상 식(17)에서 중성점에 흐르는 전류
는 정현파이고 이로 인해 상하 커패시터 전압은 항 상 맥동이 일어나게 된다. 해석을 통해 중성점에 흐르 는 전류가 정현파인 인버터의 특성상 상하 커패시터 전압의 불평형은 피할 수 없는 문제임을 알 수 있다.
3.2 제안하는 DC 오프셋 전류 주입에 의한 커패 시터 불평형 전압 보상 시스템
중성점에 정현파의 전류가 흐르는 인버터의 특성상 커패시터의 전압을 순시적으로 보상해주는 것은 불가 능하다. 따라서 본 논문에선 그림 3과 같이 한 주기 동안의 커패시터 평균 전압을 보상해줄 DC 오프셋 전류 주입 방법을 사용한다[9].
한 주기 동안 커패시터의 평균 전압 ∆ ∆와 DC 오프셋 전류 간의 관계식을 구하면 식(18, 19) 과 같다.
∆
(18)
∆
(19)
식(18, 19)을 이용하여 커패시터의 전압의 차이와 DC 오프셋 전류 간의 관계식을 구하면 식(20)와 같다.
∆ ∆ ∆
(20)
식(20)를 통해 상하 커패시터의 평균 전압 차이
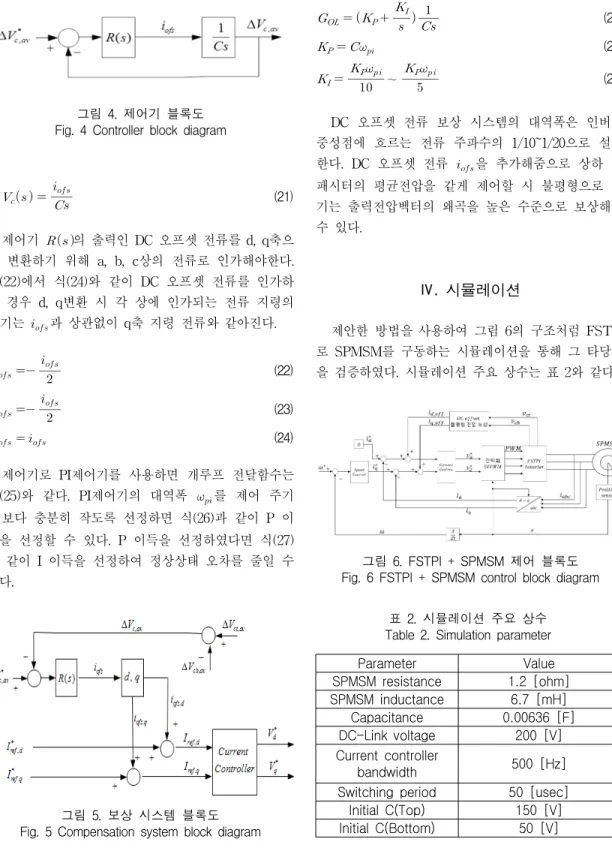
∆와 DC 오프셋 전류 은 비례관계로, DC 오프 셋 전류를 주입함으로 커패시터 평균 전압의 차이를 보상해줄 수 있음을 알 수 있다. 식(21)를 토대로 보 상 시스템의 제어기 를 구성하면 그림 4와 같이 구성할 수 있다.
그림 4. 제어기 블록도 Fig. 4 Controller block diagram
∆
(21)
제어기 의 출력인 DC 오프셋 전류를 d, q축으 로 변환하기 위해 a, b, c상의 전류로 인가해야한다.
식(22)에서 식(24)와 같이 DC 오프셋 전류를 인가하 는 경우 d, q변환 시 각 상에 인가되는 전류 지령의 크기는 과 상관없이 q축 지령 전류와 같아진다.
(22)
(23)
(24)
제어기로 PI제어기를 사용하면 개루프 전달함수는 식(25)와 같다. PI제어기의 대역폭 를 제어 주기
보다 충분히 작도록 선정하면 식(26)과 같이 P 이 득을 선정할 수 있다. P 이득을 선정하였다면 식(27) 과 같이 I 이득을 선정하여 정상상태 오차를 줄일 수 있다.
그림 5. 보상 시스템 블록도 Fig. 5 Compensation system block diagram
(25)
(26)
∼
(27)
DC 오프셋 전류 보상 시스템의 대역폭은 인버터 중성점에 흐르는 전류 주파수의 1/10~1/20으로 설정 한다. DC 오프셋 전류 을 추가해줌으로 상하 커 패시터의 평균전압을 같게 제어할 시 불평형으로 생 기는 출력전압벡터의 왜곡을 높은 수준으로 보상해줄 수 있다.
Ⅳ. 시뮬레이션
제안한 방법을 사용하여 그림 6의 구조처럼 FSTPI 로 SPMSM를 구동하는 시뮬레이션을 통해 그 타당성 을 검증하였다. 시뮬레이션 주요 상수는 표 2와 같다.
그림 6. FSTPI + SPMSM 제어 블록도 Fig. 6 FSTPI + SPMSM control block diagram
Parameter Value
SPMSM resistance 1.2 [ohm]
SPMSM inductance 6.7 [mH]
Capacitance 0.00636 [F]
DC-Link voltage 200 [V]
Current controller
bandwidth 500 [Hz]
Switching period 50 [usec]
Initial C(Top) 150 [V]
Initial C(Bottom) 50 [V]
표 2. 시뮬레이션 주요 상수 Table 2. Simulation parameter
그림 7. 전류 제어 파형
(a) 지령 전류와 실제 전류 파형 (b) 상전류 (c) 커패시터 전압
Fig. 7 Current control Results without compensation method (a) Command and real currents at d, q axis
(b) Phase currents (c) Voltage of Capacitors
그림 7,은 전류 제어 시 전류 파형과 커패시터 전 압의 파형이다. 전류 지령으로 3[A]를 인가할 때 제안 한 SVPWM을 통해 상전류가 지령전류를 추종하고 있음을 관찰할 수 있다.
그림 8. 전류 제어 + 보상 시스템 파형 (a) 지령 전류와 실제 전류 파형 (b) 상전류 (c)
커패시터 전압
Fig. 8 Current control result with compensation method (a) Command and real currents at d, q axis
(b) Phase currents (c) Voltage of Capacitors
그러나 그림 7(c)와 같이 커패시터 전압이 불평형 으로 출력 전압 벡터의 왜곡이 생겨 상전류가 서로 균형을 이루지 못함을 관찰할 수 있다. 반면 보상 시 스템을 설계한 그림 8은 커패시터 전압의 불평형이 감소하여 상전류가 균형을 이룸을 관찰할 수 있다.
그림 9. 속도 제어 + 보상 시스템 파형 (a) 지령 속도와 실제 속도 파형 (b) 상전류 (c)
커패시터 전압
Fig. 9 Speed control result with compensation method (a) Command and real speeds (b) Phase currents (c)
Voltage of Capacitors
그림 9는 속도 제어기를 설계하여 시뮬레이션을 진 행한 결과이다. 전류 제어와 동일하게 보상 시스템을 적용한 결과 커패시터 평균 전압의 차이가 줄어들어 상전류의 왜곡이 크게 감소함을 관찰할 수 있다.
Ⅴ. 실험
그림 10. 실험 환경 Fig. 10 Experimental system
본 연구에서 제안한 방법을 검증하기 위해 그림 10 과 같이 FSTPI를 사용한 모터 드라이버를 제작하고 SPMSM을 구동하여 실험을 진행하였다. 실험 주요 상수는 표 3과 같다.
Parameter Value
SPMSM resistance 0.458 [ohm]
SPMSM inductance 0.65 [mH]
Capacitance 0.003 [F]
DC-Link voltage 24 [V]
Current controller
bandwidth 1000 [Hz]
Switching period 10 [usec]
Inertia 0.0025 [kgm]
표 3. 실험 주요 상수 Table 3. Experiment parameter
그림 11은 전류 제어기를 구성하고 식(1)~(3)과 같 이 순시 커패시터 전압을 반영하지 않고 간략화 된 SVPWM을 구현한 파형이다. 지령 전류로 0.5[A]의 전압을 인가하였을 시 순시적으로 변하는 커패시터 전압에 따라 c상의 전압이 변화함으로 상전류간의 균 형이 맞지 않음을 관찰할 수 있다.
그림 11. 커패시터 전압을 반영하지 않은 전류 제어 실험 파형
Fig. 11 Experiment result of current control without capacitor voltage
그림 12는 식(4, 5)를 사용하여 FSTPI의 순시 커 패시터 전압을 반영시켜 간략화 된 SVPWM을 구현 한 경우 커패시터 전압과 상전류의 파형이다. 순시적 인 커패시터 전압을 반영한 경우 그렇지 않은 경우인 그림 11보다 상전류간의 불균형이 눈에 띄게 개선됨 을 확인할 수 있다.
그림 12. 커패시터 전압을 반영한 전류 제어 실험 파형
Fig. 12 Experiment result of current control with capacitor voltage
그림 13. 전류 제어 + 보상 시스템 실험 파형 Fig. 13 Experiment result of current control with
compensation system
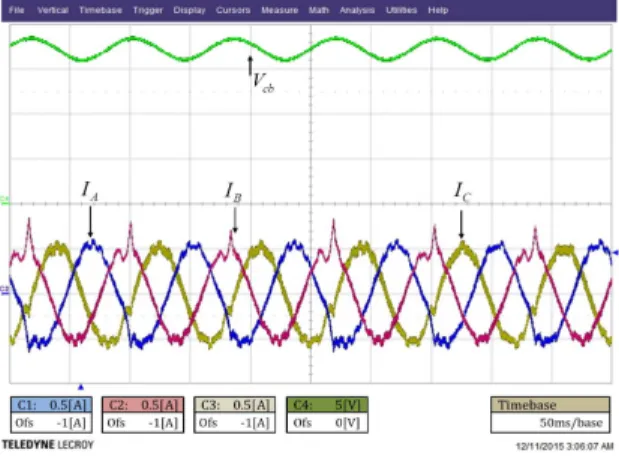
그림 13은 본 연구에서 제안하는 DC 오프셋 전류 주입에 의한 보상 시스템을 적용한 실험 파형이다. 그 림과 같이 커패시터의 평균 전압이 평형을 이루어 상 전류의 파형도 개선됨을 확인할 수 있다.
속도 제어기를 구성한 경우 전류 제어기와 마찬가 지의 결과를 얻을 수 있었다. 속도 제어기를 구성하고 지령 속도로 12.56[rad/s]를 인가할시 보상 시스템을 적용한 경우 상전류의 왜곡이 그림 16과 같이 크게 개선되었음을 관찰할 수 있다.
그림 14. 커패시터 전압을 반영한 속도 제어 실험 파형
Fig. 14 Experiment result of speed control with capacitor voltage
그림 15. 속도 제어 + 보상 시스템 실험 파형 Fig. 15 Experiment result of speed control with
compensation system
Ⅵ. 결 론
본 논문은 FSTPI의 큰 문제점인 상하 커패시터 전 압의 불평형을 보상하기 위해서 DC 오프셋 전류 주 입을 통한 보상 방법을 제안하였다. 또한 기존 FSTPI 의 적용된 SVPWM의 단점을 보완한 FSTPI에 적용 된 간략화 된 SVPWM을 제안하였다. 제안한 방법을 사용하여 SPMSM을 구동하는 시뮬레이션과 실험을 통해 그 타당성을 증명하였다. 본 연구에서 제안한 방 법을 사용할 경우 FSTPI의 실용화에 크게 기여할 수 있을 것으로 사료된다.
감사의 글
이 논문은 2014년도 광운대학교 교내학술연구 비 지원에 의해 연구되었음.
References
[1] C. Jacobina, E. Silva, A. Lima, and R.
laibeiro, “Vector and Scalar Control of a Four Switch Three Phase Inverter,” Proc. IEEE-IAS Annual Meeting, Orlando, USA, Oct, 1995.
[2] F. blaabjerg, S. Freysson, H. Hansen, and S.
Hansen, “A new optimized space vector modulation strategy for a component minimized voltage source inverter,” IEEE Trans. Power Electronics, vol. 12, no. 4, July 1997, pp. 704-714.
[3] Y. H. Jeon and M. H. Cho, “A Speed Control of BLDC Motor using Adaptive Back stepping Technique,” J. of the Korean Institute of Electronic Communications Sciences, vol. 9, no. 8, Aug. 2014, pp. 899-905.
[4] H. Lee, W. Cho, and K. Lee, “Improved switching method for sensorless BLDC motor drive,” J. of the Korean Institute of Electronic Communications Sciences, vol. 5, no. 2, Mar.
2010, pp. 164-170.
[5] S. Jung, I. Choy, and Y. Jeon, “Speed Control of IPMSM Using Nonlinear and Adaptive Back-Stepping Controller Including Integral Gain,” J. of the Korean Institute of Electronic Communications Sciences, vol. 8, no. 6, June
2013, pp. 881-889.
[6] G. Peters, G. Covic, and J. Boys, “Eliminating output distortion in four-switch inverters with three-phase loads,” IEEE Proc. Electronic Power Application, vol. 145, no. 4, July 1998, pp.
326-332.
[7] M. Correa, C. Bacobina, E. Silva, and A.
Lima, “A General PWM Strategy for Four-Switch three phase inverter,” IEEE Trans.
Power Electronics, vol. 21, no. 6, Nov. 2006, pp. 1618-1627.
[8] F. Blaabjecg, D. Neacsu, and J. Kedersen,
“Adaptive SVM to Compensate DC-link Voltage Ripple for Four-Switch Three-Phase Voltage-Source inverters,” IEEE Trans. Power Electronics, vol. 14, no. 4, July 1999, pp.
743-752.
[9] Y. Jark, S. Son, and I. Choy, “Compensation of unbalnaced capacitor voltage for Four-Switch Three-phase Inverter Using DC offset current injection,” J. of the Korean Institute of Electronic Communications Sciences, vol. 10, no. 3, Mar. 2015, pp. 365-373.
[10] Lei Hu, H. Wang, Y. Deng, and X. He, “A Simple SVPWM Algorithm for Multilevel Inverters,” IEEE 35th Annual Power Electronics Specialists Conf., Aachen, Germany, June 2004, pp. 3476-3480.
[11] P. purkait and R. Srikanth, “A simple SVPWM algorithm for elimination of neutral point current in multilevel inverter,” Int.
Symp. on Power Electronics, Electrical Drives, Automation & motion, Taormina, Italy, May 2006, pp. 566-570.
저자 소개
손상훈(Sang-Hun Son) 2014년 광운대 로봇학부 졸업 2014년∼현재 광운대 대학원 제 어계측공학과 석사과정
※ 관심분야 : 서보제어, 전력전자
박영주(Young-Joo Park) 1997년 원광대 제어계측공학과 졸업
2006년 광운대 대학원 제어계측 공학과 졸업(공학석사)
2013년∼현재 광운대 대학원 제어계측공학과 박 사과정
※ 관심분야 : 서보제어, 전력전자
최익(Ick Choy) 1979년 서울대 전기공학과 졸업 1981년 서울대 대학원 전기공학 과 졸업(석사)
1990년 동대학원 졸업(공학박사) 1982년~2003년 한국과학기술연구원 책임연구원 2003년∼현재 광운대 로봇학부 교수
※ 관심분야 : 서보제어, 지능제어, 전력전자