Vol.14, No.3, pp.69-77 (2020)
11.. 서서 론론
소형 멀티콥터 무인기는 휴대가 용이하며 수직 이착 륙이 가능하다는 장점 때문에 항공촬영, 정찰, 농어업, 운송, 여가 등 여러 분야에서 다양하게 활용되고 있다.
최근에는 사람이 접근하기 어려운 재난 상황에 멀티콥
터 무인기를 활용하는 사례가 지속적으로 증가하고 있 다.
멀티콥터의 성능에 영향을 미치는 요소가 여러 가지 있으나, 그 중 중량이 성능에 미치는 영향은 매우 크 다. 배터리 및 추진시스템의 효율 향상이 드론의 성능 향상에 크게 기여 하지만, 배터리 다음으로 중량 비중 이 큰 기체구조의 경량화 또한 성능의 중요한 요소이 다. 최근 개발되는 멀티콥터 무인기는 기체구조 경량 화를 위해 탄소 복합재료를 사용하고, 세미 모노코크 (Semi- monocoque) 구조로 동체를 설계하는 추세이
재난치안용 멀티콥터 무인기 기체구조 개발
신정우1,†· 이승규1· 노정호2
1한국항공우주연구원
2한국항공대학교
Development of Airframe Structure
for Disaster and Public Safety Multicopter UAV
Jeong Woo Shin1,†, Seunggyu Lee1 and Jeong Ho Noh2
1Korea Aerospace Research Institute
2Korea Aerospace University
Abstract
Airframe structure development of the 35 kg class ‘Disaster and Public Safety Multicopter’ UAV is described in this paper. To reduce the airframe weight, T-700 grade CFRP composite material was used, and the fuselage was designed with the semi-monocoque structure and plate installed with the control and communication devices designed in a sandwich structure. The specimen tests for the laminated plate and pipe were conducted to verify the strength and stiffness of the designed parts. The stacking sequence of composite materials was determined by the static strength and vibration analysis, and landing gear strut was designed by the nonlinear analysis with decent speed and ground clearance requirements. The static strength test was performed to evaluate the structural integrity and to verify the landing gear behavior.
초 초 록록
본 논문에서는 35 kg급 재난치안용 멀티콥터 무인기의 기체구조 개발에 대해 기술한다. 경량화를 위 해 구조재료는 T-700급 탄소 복합재료를 사용하였으며, 동체는 세미 모노코크 구조로, 제어 및 통신장비 가 장착되는 판재는 샌드위치 구조로 설계하였다. 설계된 부품과 동일한 적층판과 파이프를 제작하고 시편시험을 수행하여 강도와 강성을 확인하였다. 정적강도 및 진동 해석을 수행하여 복합재료 적층순서 를 결정하였고, 착륙속도 및 지상이격 요구조건과 비선형 해석을 통해 착륙장치 스트러트의 적층순서를 결정하였다. 정적강도시험을 통해 구조 건전성을 평가하고 착륙장치의 거동을 확인하였다.
Key Words : Multicopter UAV(멀티콥터 무인기), Airframe Structure(기체구조), Composite Material(복합재 료), Structural Analysis(구조해석), Static Strength Test(정적강도시험)
Received: Feb. 10, 2020 Revised: Apr. 02, 2020 Accepted: Apr. 02, 2020
† Corresponding Author
Tel: +82-42-860-2026, E-mail: [email protected]
Ⓒ The Society for Aerospace System Engineering
다[1]. 세미 모노코크 동체는 하중을 지지하는 얇은 표피(Skin)와 프레임(Frame)을 이용해 일체형으로 제 작하므로 체결류를 최소화하여 경량화가 가능하며 항 력을 고려한 형상설계가 가능하여 비행성능 또한 향상 시킬 수 있다. 그러나, 제작 비용이 비싸며 파손 시 수 리가 용이하지 않다는 단점이 있다.
최근 멀티콥터 무인기 기체구조에 관한 몇몇 연구가 진행되었다. 황인성 등은 상용화된 30 kg급 국산 멀티 콥터의 성능향상을 위한 기체구조 경량화를 수행하였 다[2]. 기존 알루미늄 합금 구조를 탄소 복합재료로 변경하고, 추진시스템이 장착되는 암(Arm)을 최적화하 여 약 880 g을 경량화 하였다. 장병욱 등은 단순화된 기체구조 구성품으로 설계된 멀티콥터의 초기 사이징 을 위한 기체구조 중량 예측 기법을 제시하였다[3].
이 기법은 2개의 판재(Plate)를 볼트/너트 등의 체결류 를 이용해 연결하고, 여기에 추진시스템이 장착된 파 이프(Pipe) 형상의 암(Arm)과 파이프 형상의 착륙장치 를 설치하는 구조를 갖는 기존 멀티콥터의 초기 사이 징 및 중량 예측에 매우 유용하게 적용될 수 있다.
Verbeke와 Debruyne은 시험으로 측정한 소형 멀티콥 터의 로터 추력 히스토리를 이용해 강제진동해석을 수 행하여 동체 특정 위치에서의 변위 응답 결과를 제시 하였다[4]. 로터의 진동이 기체 및 내/외부 장착물에 미치는 영향이 큰 멀티콥터의 개발에 있어 진동해석은 매우 중요한 부분이다.
멀티콥터 기체구조 경량화, 해석기법, 초기 사이징 및 중량 예측 등 개별 연구에 관한 문헌들은 있지만, 기체구조 전체 개발에 대해 체계적으로 기술된 문헌은 찾아보기 어렵다. 본 논문에서는 재난치안용 멀티콥터 무인기 중 가장 크기가 큰 MC-3 (Fig. 1)의 기체구조 개발 과정에 대해 기술한다. MC-3는 6개의 로터 (Rotor)를 갖는 최대중량 35 kg의 멀티콥터이며, 해양 구조 및 감시지원 임무를 수행할 예정이다. 일부 브라 켓(Bracket)을 제외한 모든 구조부재는 T-700급 CFRP (Carbon Fiber Reinforcement Plastic) 복합재 료를 이용해 설계하였으며, 강도해석과 진동해석을 통 해 각 부재의 적층정보를 결정하였다. 착륙속도 및 지 상 이격(Ground Clearance) 요구조건과 Energy Balance 식을 이용해 착륙장치를 설계하였으며, 스트 러트(Strut)의 변형이 크게 발생하기 때문에 비선형 해
석을 수행하였다. 최종적으로 정적구조시험을 통해 구 조 건전성을 평가하고 착륙장치의 거동을 확인하였다.
Fig. 1 Configuration of MC-3
22.. 본본 론론
22..11 기기체체구구조조 설설계계
멀티콥터 무인기 각 부재 설계에 사용한 복합재료는 일방향(Uni-direction) 복합재료인 CP125NS와 직물 (Fabric) 복합재료인 WSN3KY 2종류이다. 설계 및 해 석에 사용한 복합재료 물성치는 Table 1과 같다. 물성 치는 시편시험을 수행하여 얻은 결과에 적절한 Knock-down 계수를 곱하여 산출하였다.
CP125NS (UD)
WSN3KY (Fabic) E11 (GPa) 131.5 57.7 E22 (GPa) 8.7 57.7
0.28 0.055
G12 (GPa) 4.149 4.527
0.00677 0.00845
0.00226 0.00845
0.00688 0.01052 Density (g/cm3) 1.647 1.647 Thickness (mm) 0.1150 0.2273 Table 1 Material Properties for CFRP (Lamina)
Fig. 2 Fuselage Skin of MC-3
Fig. 3 Fuselage Frame and Floor of MC-3
Fig. 4 Arm and Aluminum Bracket of MC-3
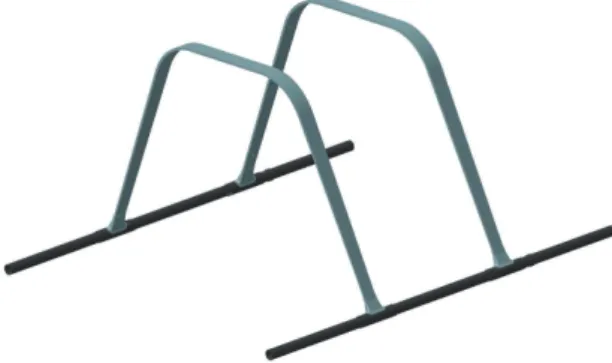
Fig. 5 Landing Gear of MC-3
동체는 Fig. 2의 표피와 Fig. 3의 프레임을 결합한
세미 모노코크 구조로 설계하였다. 표피는 WSN3KY 2장을 사용하였으며 프레임은 CP125NS를 사용하여 설계하였다. 특화임무장비와 제어 및 통신 장비가 장 착되는 동체 하부층(Lower Floor)과 중간층(Mid Floor)에는 경량화를 위해 CP125NS와 폼(Foam)을 이용한 샌드위치 구조로 설계하였다. 상부층(Upper Floor)에는 가장 무거운 배터리가 장착되므로 샌드위 치가 아닌 복합재료 적층판을 사용하였으며, 강성을 증가시키기 위해 보강재(Stiffener)를 사용하여 보강하 였다. 상부층과 중간층은 분리 가능한 구조로 설계하 였다.
추진시스템과 동체를 연결하는 암은 Fig. 4와 같으 며, 파이프 형태를 갖는다. 동체와 2점 체결 방식으로 알루미늄 브라켓과 볼트를 이용해 연결하며, 이동 및 보관의 편리성을 위해 암을 동체로 부터 분리할 수 있 도록 설계하였다. 암의 반대쪽 끝단에는 모터, 로터, ESC(Engine Control System)로 구성된 추진시스템이 장착되며, 마찬가지로 알루미늄 브라켓과 볼트를 이용 해 연결된다.
착륙장치는 스트러트와 스키드(Skid) 그리고 이 둘 을 연결하는 커넥터(Connector)로 구성되며 동체와 볼 트를 이용해 연결된다. 스트러트의 탄성 변형을 통해 착륙 시 발생하는 충격을 흡수한다. 착륙장치 구성품 은 모두 복합재료를 사용하였으며, 스트러트는 판형으 로, 스키드는 파이프 형태로 설계하였다. 착륙장치 설 계에 대해서는 2.3절에서 자세히 다루도록 한다.
22..22 시시편편 시시험험
설계를 진행함과 동시에 부재의 강도와 강성을 검증 하기 위해 판재와 파이프 부품에 대한 시편시험을 수 행하였다. 동체 프레임과 상부층에 사용하는 복합재료 적층판(Laminate Plate)과 동일한 적층순서를 갖는 평 판 시편과 암과 동일한 적층순서를 갖는 복합재료 적 층 파이프(Laminate Pipe) 시편을 제작하였다. 적층순 서는 다음과 같으며 재료는 CP125NS를 사용하였다.
암은 길이방향의 강성을 증가시키기 위해 0° 방향 적 층을 많이 사용하였다.
Plate: [90/45/0/-45/90/45/0/-45/90/0]S
Pipe: [0/90/0/45/-45/0/90/0]
Fig. 6 Tensile Test for Laminate Plate
Fig. 7 4-pt. Bending Test for Laminate Pipe
Fig. 8 Tensile Test Data for Plate
적층판 시편은 ASTM D3039/D3039M에 따라 인장 시험(Fig. 6)을 수행하였으며[5], 파이프 시편은ASTM D6272-02에 따라 4점 굽힘시험(Fig. 7)을 수행하였다 [6]. Fig. 8은 판형 시편에 대한 인장시험 응력/변형률 그래프이며, Fig. 9는 파이프 시편에 대한 4점 굽힘시 험 굽힘 응력/변형률 그래프이다. Table 2와 Table 3
은 고전 적층판 이론(Classical Laminate Theory)을 이용해 계산한 등가 탄성 계수(Equivalent Elastic Modulus, Eeq)와 파손응력을 시험결과와 비교한 결과 인데, 예측치와 시험결과가 5% 이내에서 잘 일치함을 알 수 있다.
Fig. 9 4-pt. Bending Test Data for Pipe
Prediction Test Difference Failure Strain
(mm/mm) 0.01506 0.01468 -2.5%
Failure Stress
(MPa) 828 801 -3.3%
Load (N) 52,078 50,384 -3.3%
Eeq (GPa) 54.977 52.288 -4.9%
Table 2 Tensile Test Results for Plate
Inner Diameter
Eeq (GPa)
Difference Prediction Test
20 mm 76.357 77.823 1.9%
28 mm 76.357 75.536 -1.1%
33 mm 76.357 76.411 0.1%
Table 3 4-pt. Bending Test Results for Pipe
22..33 착착륙륙장장치치 설설계계
착륙장치는 착륙 시 발생하는 에너지를 흡수하며 지 상 거치 시 무인기를 지지하는 역할을 한다. 재난치안 무인기는 비상착륙 시 내부 장착물을 보호할 수 있도 록 착륙장치를 설계해야 하며, 상세 설계요구조건은
다음과 같다.
○ 정상착륙 : 0.5 m/s, 양력비 2/3 ○ 비상착륙 : 1.0 m/s, 양력비 3/3 ○ 비상착륙 시 수직변위 : 최대 50 mm
동체 하부에 장착되는 특화임무장비가 비상착륙 시 지면과 충돌하지 않도록 하기 위해 최대 변위를 50 mm로 제한하였다. 착륙 시 스트러트가 흡수하는 에너 지는 무인기의 운동에너지와 위치에너지의 합과 같아 야 하며 Eq. 1과 같이 표현된다[7].
(1)
여기서
: strut efficiency
: vertical mass travel,
: ground reaction load factor
: aircraft weight,
: lift,
: sink speed,
설계요구조건과 스트러트 효율(Strut Efficiency) 0.55를 Eq. 1에 대입하여 비상착륙 시 지상반력 하중 배수(Ground Reaction Load Factor)를 계산하면 1.85 이다. 효율은 착륙장치의 하중-변위 선도로 부터 계산하며, 선도는 착륙장치의 형상과 재료 및 적층정 보에 따라 결정된다.
산출된 지상반력을 하중의 형태로 착륙장치에 부과 하여 비상착륙 시 수직변위가 50 mm가 되도록 스트 러트의 재료와 적층을 결정해야 한다. 결정된 적층 순 서에 따라 하중-변위 선도가 바뀌면 효율도 바뀌게 되 므로 이를 같이 적용해야 한다. 유한요소해석(Finite Element Analysis)을 통해 시행착오를 거쳐 적층순서 를 결정하였으며 해석도구는 MSC.Nastran을 사용하 였다.
선형 및 비선형 유한요소 해석을 통해 산출된 초기 착륙장치 변위는 Table 4와 같다. 측방향 변위가 크게 발생하는 것을 알 수 있는데, 이는 스트러트는 비선형 거동을 유발한다. 선형해석 결과는 수직변위가 요구조 건을 만족하지만, 비선형 해석 결과는 요구조건을 만
족하지 못함을 알 수 있다. 따라서 비선형 해석을 수 행해야 하며, 동시에 파손여부도 함께 검토하여 적층 순서를 최종 결정해야 한다. 비선형 해석을 통해 결정 된 최종 적층정보는 다음과 같다.
[WSN3KY 0/ CP125NS 010/WSN3KY 08]S
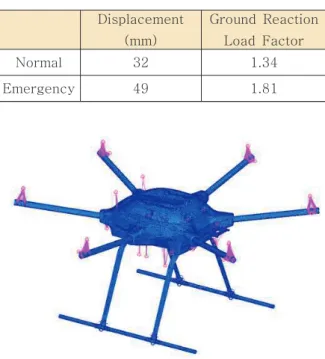
착륙조건별 변위 및 지상반력배수는 Table 5와 같 다. 착륙 시 착륙장치 스트러트의 비교적 큰 변형으로 인해 낮은 지상반력이 발생함을 알 수 있다.
Direction Displacement (mm)
Difference Linear Non-linear
Vertical 43.6 58.0 25%
Lateral 73.1 86.6 16%
Table 4 Initial Deflection of Landing Gear Strut
Displacement (mm)
Ground Reaction Load Factor
Normal 32 1.34
Emergency 49 1.81
Table 5 Displacement and Load Factor
Fig. 10 Finite Element Model for MC-3
22..44 강강도도 및및 진진동동 해해석석
구조 건전성을 평가하고 복합재료의 적층순서를 결 정하기 위해 강도 및 진동해석을 수행하였다. 유한요 소모델은 Fig. 10과 같으며, 하중을 지지하고 전달하
는 부재에 대해서만 모델을 구성하였다. 동체, 암, 착 륙장치는 2D 쉘 요소(Shell Element)로, 동체와 암을 연결하는 브라켓은 비교적 두껍기 때문에 3D 요소로, 볼트는 1D 보 요소(Beam Element)를 이용해 모델링 하였다. 그 외 추진시스템, 제어/통신 장비, 특화임무 장비, 배터리 등은 질량만 모델링 하였으며, MSC.Nastran에서 제공하는 강체요소(Rigid Body Element)인 RBE3 요소를 이용해 기체구조에 연결하 였다.
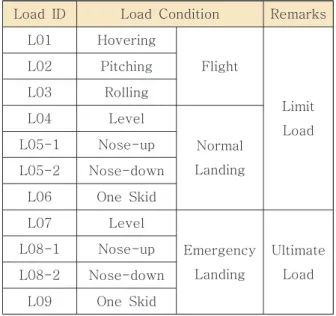
Load ID Load Condition Remarks L01 Hovering
Flight
Limit Load L02 Pitching
L03 Rolling L04 Level
Normal Landing L05-1 Nose-up
L05-2 Nose-down L06 One Skid L07 Level
Emergency Landing
Ultimate Load L08-1 Nose-up
L08-2 Nose-down L09 One Skid Table 6 Load Conditions
먼저 강도해석을 수행하였으며, 해석에 적용한 하중 조건은 Table 6과 같다. 설계제한하중은 3개의 비행 하중조건와 4개의 착륙하중조건으로 구성되며, 비상착 륙하중 4개 조건은 설계극한하중으로 적용한다. 복합 재료 해석에는 고전 적층판 이론을 적용하였으며, 정 하중 및 좌굴해석을 통해 최소 안전여유(Margin of Safety)를 산출하였다. 해석 결과, 모든 부품이 충분한 안전여유를 확보한 것으로 파악되었다. Fig. 11과 Fig.
12는 프레임과 착륙장치의 해석 결과를 보여주고 있는 데, 최소 안전여유가 0.50 이상으로 충분한 강도를 확 보하고 있음을 알 수 있다.
다음으로 MC-3의 동특성을 파악하기 위해 진동해 석을 수행하였다. 고유진동해석(Normal Mode Analysis)을 통해 무인기의 전체적인 진동특성을 파악 한 후 주파수 응답해석(Frequency Response
Analysis)을 수행하여 주요 탑재물의 무게중심에서의 가속도와 변위 응답을 산출하였다. 고유진동해석 결과 는 Fig. 13과 같다. 착륙장치 스트러트의 굽힘 모드 진동수가 가장 낮게 나타나며, 다음으로 암의 굽힘 모 드가 나타난다. 가장 무거운 배터리가 장착되는 상부 층의 진동수도 비교적 낮은 것을 알 수 있다.
Fig. 11 Strength Analysis Result of Frame
Fig. 12 Strength Analysis Result of Landing Gear
Fig. 13 Normal Mode Analysis Result
MC-3 각 로터 중심에 진폭이 1.0 N 인 조화함수 (Harmonic Function)를 0 ~ 100 Hz까지 부가하여 내/외부 탑재물과 모터의 무게중심에서의 가속도 및
변위 응답을 계산하였다. Fig. 14와 Fig. 15는 각 탑 재물에 대한 가속도와 변위 응답 결과인데, 사각형 점 선으로 표시된 영역이 무인기 운용 시 로터 회전수 범 위이다. 운용범위 내에서 최대 가속도는 1,196 mm/s2 이며 최대 변위는 0.023 mm로 모두 비교적 작은 값 으로 무인기 운용에 문제가 없을 것으로 판단된다.
Fig. 14 Frequency Response Analysis Result - Acceleration
Fig. 15 Frequency Response Analysis Result - Displacement
22..55 정정적적강강도도시시험험
정적강도시험을 수행하여 기체구조의 건전성을 평가 하고 해석결과와 비교하였다. 시험 요구조건은 다음과 같다[4].
○ 설계제한하중(100% DLL(Design Limit Load)) 하에서 주 하중전달구조의 좌굴 또는 파손 없이 하중을 지지
○ 설계극한하중(150% DLL) 하에서 주 하중전달구 조의 파손 없이 하중을 3초간 지지
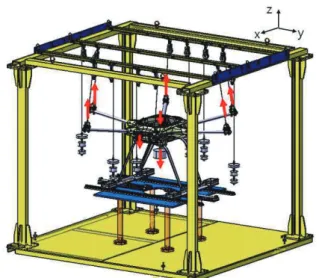
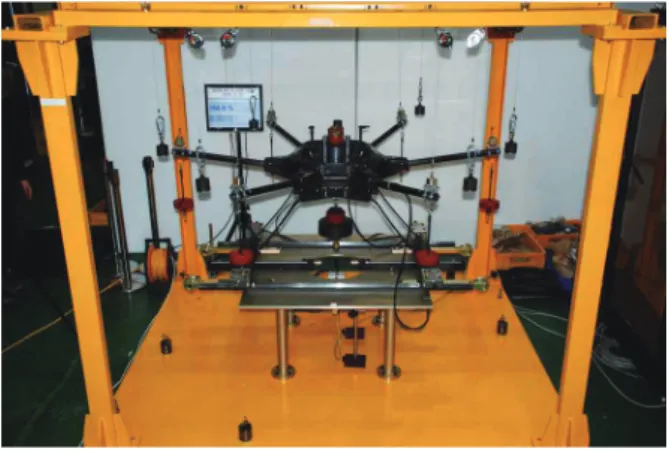
Fig. 16 Static Strength Test Setup
Fig. 17 Installation of Whiffle-tree
Fig. 18 Installation of Bracket
시험개념 및 시험치구는 Fig. 16과 같으며, 시험하 중 부가 방향을 화살표로 표시하였다. 암 끝단 추진시 스템 장착부에는 추진하중을 모사해주기 위해 시험하 중을 +z 방향으로 부가하였으며, 배터리, 내부장착물, 임무장비 등의 중량물의 관성하중을 모사해주기 위한 시험하중은 -z 방향으로 부가하였다. 착륙장치 스키드
를 시험치구에 고정하고, 스키드 고정부에는 레일 (Rail)을 장착해 시험 중 스트러트가 좌/우로 변형될 수 있도록 하였다.
시험하중을 부가하기 위한 하중부가장치(Loading System)는 브라켓과 휘플트리(Whiffle-tree), 강철 와이어, 도르래, 추(Dead Weight)와 추 트레이(Tray) 로 구성된다. 상부층과 중간층에는 배터리 및 내부 장 착물의 관성하중을 부가하기 위해 Fig. 17과 같이 휘 플트리를 장착하였으며, EO/IR 및 라이다 장착부, 특 화임무장비 장착부, 추진시스템 장착부에는 Fig. 18과 같이 브라켓을 장착하여 관성하중과 추진하중을 부가 하였다. 특히, 추진시스템 브라켓에는 도르래와 추를 연결하여 추진하중(양력)을 모사하였다.
Fig. 19 Design Ultimate Load Test for L04 Condition
시험조건은 Table 6의 비행하중조건인 L01과 착륙 하중조건인 L04 조건으로 선정하였다. 암, 상부층, 하 부층, 착륙장치 스트러트에 총 12 채널의 스트레인 게 이지를 부착하였으며, 착륙장치의 변위를 측정하기 위 해 동체 하부에 2개의 변위 게이지를 설치하였다.
Fig. 19는 L04 조건의 설계극한하중 시험 모습이다.
MC-3는 설계제한하중시험과 설계극한하중시험에서 주 하중전달구조에 어떠한 좌굴 및 파손도 발생하지 않았다. Fig. 20은 L01 조건의 암에 부착된 스트레인 게이지의 측정치와 해석치의 비교 그래프이며, Fig.
21은 L04 조건의 스트러트의 변위 측정치와 해석치의 비교 그래프이다. 실선은 측정치, 점선은 해석치인데, 측정치와 해석치가 잘 일치함을 알 수 있다. 스트러트 의 변위는 해석에서 예측한 바와 같이 비선형 현상이
나타나는 것을 확인할 수 있으며, 해석치보다 시험결 과의 비선형성이 더 크게 나타나는 것을 알 수 있다.
Fig. 20 Strain Comparison for L01 Condition
Fig. 21 Displacement Comparison for L04 Condition
33.. 결결 론론
본 논문에서는 35 kg급 재난치안용 멀티콥터 무인 기의 기체구조 개발에 대해 기술하였다. 경량화를 위 해 T-700급 복합재료를 사용하고, 동체는 세미 모노 코크 구조로 설계하였다. 설계에 사용하는 복합재료 적층판과 파이프는 설계단계에서 시편 시험을 수행하 여 강도 및 강성을 평가하였다. 강도해석과 진동해석 을 통해 복합재료 적층 순서를 결정하였고, 정적강도 시험을 통해 구조 건전성을 평가하고 착륙장치의 거동 을 확인하였다.
지금까지 국내 업체가 개발한 대부분의 멀티콥터 무 인기의 경우 기체구조의 체계적인 개발은 전무한 실정
이며, 본 연구는 앞으로 있을 멀티콥터 무인기 기체구 조 개발에 많은 도움을 줄 것으로 기대된다. 재난치안 용 무인기는 현재 비행시험 중에 있으며, 곧 개발을 완료하여 실전에 배치할 예정이다.
후 후 기기
동 연구는 다부처사업으로 수행중인 재난치안용 멀 티콥터 무인기 공통플랫폼 기술 개발 (과제번호 10080091) 연구결과 중 일부임
RReeffeerreenncceess
[1] D.-K. Kim, S.-Y. Wie, J. Song, K.-W. Song, C.
Hwang and G. Joo, "Technology Trend on the Status of the Unmanned Multicopter Development," Current Industrial and Technologic Trends in Aerospace, vol.
13, no. 2, pp. 80-91, 2015.
[2] I.-S. Hwang, B.-W. Jang, M. Kim, J.-Y. Eom, D.-K.
Kim and W. Kang, "Performance Enhancement Study for a small Drone of 30 kg Class Multicopter," Proc.
of 2015 KSAS Fall Conference, pp.1040-1043, 2015.
[3] B.-W. Jang, I.-S. Hwang, M. Kim, B. Lee, Y. Jung and W. Kang, “Airframe Weight Estimation Method for Initial Sizing of Multicopter,” J. of the Korea Society for Aeronautical and Space Sciences, vol. 46, pp. 723-734, 2018.
[4] J. Verbeke and S. Debruyne, "Vibration Analysis of a UAV Multirotor Frame," Proc. of ISMA 2016 International Conference on Noise and Vibration Engineering, pp. 2401-2409, 2016.
[5] D 3039/D 3039M, "Standard Test Method for Tensile Properties of Polymer Materix Composite Materials,"
American National Standard Institute International, pp.
1-13, 2000.
[6] D 6272-02, "Standard Test Method for Flexural Properties of Unreinforced and Reinforced Plastics and Electrical Insulation Materials by Four-Point Bending," American National Standard Institute International, pp. 1-9, 2002.
[7] N. S. Currey, Aircraft Landing Gear Design : Principles and Practices, American Institute of Aeronautics and Astronautics, Washington, DC, pp.
33-37, 1988.
[8] Federal Aviation Regulation (FAR), Part 23 - Airworthiness Standards: Normal, Utility, Acrobatic, and Commuter Category Airplanes, Federal Aviation Administration, pp. 210-211, 2009.