저작자표시-비영리-변경금지 2.0 대한민국 이용자는 아래의 조건을 따르는 경우에 한하여 자유롭게 l 이 저작물을 복제, 배포, 전송, 전시, 공연 및 방송할 수 있습니다. 다음과 같은 조건을 따라야 합니다: l 귀하는, 이 저작물의 재이용이나 배포의 경우, 이 저작물에 적용된 이용허락조건 을 명확하게 나타내어야 합니다. l 저작권자로부터 별도의 허가를 받으면 이러한 조건들은 적용되지 않습니다. 저작권법에 따른 이용자의 권리는 위의 내용에 의하여 영향을 받지 않습니다. 이것은 이용허락규약(Legal Code)을 이해하기 쉽게 요약한 것입니다. Disclaimer 저작자표시. 귀하는 원저작자를 표시하여야 합니다. 비영리. 귀하는 이 저작물을 영리 목적으로 이용할 수 없습니다. 변경금지. 귀하는 이 저작물을 개작, 변형 또는 가공할 수 없습니다.
공학박사 학위논문
선박용 디젤엔진의 출력 측정에 관한 연구
A Study on the Measurement of Service Power for
Marine Diesel Engine On-board Ship
지도교수 최 재 성
2013 년 2 월
한국해양대학교 대학원
기관공학과
목
차
List of Tables
···ⅳList of Figures
···ⅵList of Photos
···ⅹAbstract
···ⅺNomenclature
···ⅹⅳ제 1 장
서 론
···1 연구의 배경 및 목적 1.1 ···1 연구 내용 1.3 ···4제 2 장
이론 관계식
···6 피스톤의 변위 속도와 가속도 2.1 , ···6 크랭크축의 회전력 2.2 ···9 연소해석 2.3 ···13 열발생률 2.3.1 ···13 열손실률 2.3.2 ···18제 3 장
기존의 엔진출력 측정 방식과 TDC 위치의 영향···23 서언 3.1 ···23 실험장치 및 실험방법 3.2 ···24 엔진의 순간속도변동 계측 및 고찰 3.3 ···32 속도변동과 부하변동이 위치 측정에 미치는 영향 3.4 TDC ···36결언 3.5 ···43
제 4 장
디젤엔진의 손실각에 관한 이론적 연구 ···44 서언 4.1 ···44 손실각의 이론적인 배경 4.2 ···46 손실각의 정의 4.2.1 ···46 손실각에 대한 선행 연구 4.2.2 ···49 손실각에 대한 이론적 고찰 4.3 ···53 압축 사이클 시뮬레이션 4.3.1 ···53 손실각에 미치는 영향인자 4.3.2 ···54 압축 사이클 시뮬레이션에 의한 손실각의 고찰 4.3.3 ···61 결언 4.4 ···64제 5 장
디젤엔진의 출력산정을 위한 새로운 방법 ···65 서언 5.1 ···65 실험장치 및 실험방법 5.2 ···66 위치보정과 지시마력 계산 5.3 TDC ···80 계측결과 및 고찰 5.3.1 TDC ···80 향상된 시간기준 계측방법에 의한 지시마력 계산 및 고찰 5.3.2 ····82 다 실린더 엔진의 경우 크랭크축의 변형에 의한 영향 5.3.3 ···84 블로바이 가스량의 예측 및 고찰 5.4 ···87 결언 5.4 ···90제 6 장
선박발전기용 디젤엔진의 연소상태개선에 의한 연료절감 ···92 서언 6.1 ···92 연소압력 분석 장치의 개요와 실험 방법 6.2 ···93연소압력 분석 장치의 개요 6.2.1 ···93 실험 장치와 실험방법 6.2.2 ···95 연소상태 분석과 고찰 6.3 ···95 연소상태 분석 6.3.1 ···95 연료분사시기 측정 및 조정 6.3.2 ···100 연료분사시기 조정 후 연소해석 6.3.3 ···103 해석결과의 고찰 6.3.4 ···110 결언 6.4 ···112
제 7 장
결 론
···113참고문헌
···116감사의 글 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
122
A Study on the Measurement of Service Power
for Marine Diesel Engine On-board Ship
Kyun - Sik
Jung
Department of Marine System Engineering
Graduate School
Korea Maritime University
(Supervisor : Prof. Jae-Sung Choi)
Nomenclature
: The heat equivalent of work kcal/(㎏ ㎝f· )
: Specific heat of constant volume kcal/( f·K)㎏
: Mean piston speed ㎝/sec
: Area ㎠
: Weight of gas ㎏f
: Pressure in cylinder ㎏ ㎠f/
: Initial pressure ㎏ ㎠f/
: Calorific value of actual rate of heat release kcal
: Calorific value of fuel oil kcal
: Calorific value of heat loss kcal
: Gas constant ㎏ ㎝ ㎏f· /( f·K)
: Rate of heat release kcal/deg
: Temperature of gas K
: Initial temperature K
: Well temperature K
: Internal energy kcal
: Volume of cylinder ㎤
: Clearance volume ㎤
: Stroke volume ㎤
: Absolute work ㎏ ㎝f·
: Cylinder bore ㎝
: Connecting rod length ㎝
: Crank arm radius ㎝
: Coefficient of heat transfer kcal/( ·K)㎠
: Thermal conduction rate kcal/( ·K)㎝
: Compression ratio
: Crank angle deg
: Connecting rod length() by radius of crank arm(r)
: Excess air ratio
: Coefficient of absolute viscosity ㎏ ㎝f/ ·sec
: Coefficient of absolute viscosity at standard condition ㎏ ㎝f/ ·sec
: Density ㎏ ㎤f/
제 1 장 서 론
연구의 배경 및 목적
1.1
환경에 대한 관심이 지속적으로 고조됨에 따라 국제해사기구는 1997년부터 선박 대기오염에 대한 심각성을 인지하고 질소산화물 배출 규제 법안을 조기발 효를 위하여 별도의 협약으로 제정하지 않고 기존 해양오염방지협약인 MAPPOL 의 새로운 부속서인 제 부속서 선박대기오염물질 배출규제협약 73/78 Annex Ⅵ( 6 - ) 의 형태로 제정하였다. 이 부속서는 NOx를 포함한 여러 물질의 배기 배출 규제 가 포함되어 있다. 특히 NOx의 경우 정격 엔진속도에 따른 배출규제기준과 상세기술지침 “ Protocal of 1997 to amend MAPPOL 73/78 and final Act of the 1997 MAPPOL Conference and the Technical code on control of Emission of 을 마련하고 있으며 상세기술 Nitrogen Oxides from Marine Diesel Engines Ⅱ"
지침에 따라 NOx를 평가하여 기준을 만족하는 선박용 엔진에 대해 배기가스 인 증서를 발급하도록 강제화하고 있다.[1] 그러나 NOx 규제에 대해서는 2000년 1월 1일 이후 선박에 탑재되는 출력 이상의 디젤엔진이나 주요한 개조가 이루어지는 출력 이상의 디젤 130kW 130kW 엔진에 대하여 NOx 규제안(Regulation 13)이 적용되며, 시험, 검사 및 승인을
위해서 선박용 디젤엔진의 NOx 배출에 관한 기술코드(NOx Technical Code)가
마련되었다. 이것이 Tier Ⅰ의 기준이다. 이후 환경에 대한 관심이 지속적으로
고조됨에 따라 2008년 IMO는 MEPC 58차 회의 및 NOx Technical code의 개정을
채택하여 개정된 부속서 및 NOx Technical code 2008을 제정하고 2010년 7월 1
일부터 효력을 발휘하고 있다.
주요 개정사항으로는 2011년 1월 1일 이후 건조되는 130kW 초과 선박에 탑재
된 디젤엔진부터는 앞서 규정된 기준(Tier Ⅰ)의 약 15~20% 정도 저감한 기준
을 적용 하고 추가적으로 2016년 1월 1일 이후 건조된 선박에서는 Tier Ⅰ의
를 감소한 배출물 규제가 적용될 예정이다 이 에
80% NOx . NOx technical code
하고 있으며, 이를 충족시키기 위한 저감 기술뿐만 아니라 정확한 출력 산정이 중요시 되고 있다.
디젤엔진의 출력의 종류로는 지시마력(IHP : Indicated Horse Power)과 제동
마력(BHP : Brake Horse Power) 등이 있다. 지시마력은 도시마력이라고도 하며
실제 엔진에 작용하는 동력을 말하고 지압선도로부터 얻는 도시 평균 유효압력 에 의하여 계산된다 제동마력은 크랭크축 단에서 계측된 마력으로 지시 (IMEP) . 마력에서 마찰손실을 감한 마력이다. 도시마력을 구하기 위해서 종래에는 기계 식 지압기를 주로 사용하여 왔다. 이 기계식 지압기는 엔진의 테스트 콕에 설 치하여 기록지 위에 그려진 P-V선도의 면적을 플래니미터(Planimeter)라는 측 정자를 이용하여 출력을 산출하는 것으로 통상 약 10%의 오차를 가지는 것으로 알려져 있으며, 계측하는 사람과 숙련도 등에 의해서 일관성 있는 P-V선도를 얻지 못하는 단점을 가지고 있다. 최근에는 이러한 기계식 지압기의 단점을 극 복하기 위하여 전자식 지압기가 개발되어 보급되고 있다. 그러나 이러한 전작 식 지압기도 선박의 실제 출력과 많은 오차가 있는 것으로 보고되고 있으며,
주기관의 출력을 위하여 설치된 EMS(Engine Monitoring System)와 MIPS(Mean
도 동일한 문제점이 있는 것으로 알려져 있다
Indicated Pressure System) .
실린더 내 압력 분석장치는 내연기관의 연구와 개발에서 매우 중요한 도구이 다. 이것은 지시평균유효압력(IMEP), 마찰평균유효압력, 연료소비량, 열발생 률, 질량연소율 등과 같은 중요한 성능에 관계된 변수를 파악하는데 유효하 다.[2~4] 또한 실린더 압력 분석 기술은 시험결과의 현상에 대한 원인규명 및 설 계사양 변경 시 효과를 예측할 수 있는 수단으로써 엔진 개발에 많이 활용되고 있으며, 최근 컴퓨터의 성능 향상으로 배기가스 저감과 연비향상을 위한 최적 연소를 위한 필수 장치로 그 역할이 증대되고 있다. 또한, 무엇보다 신뢰성 있 는 연소해석이 중요한 기술로 인식되고 있다.[5],[6] 연소해석에서 오차가 발생하는 주요한 원인은 정확한 TDC를 결정하지 못하기 때문이다. 엔진출력 측정에서 상사점(TDC) 1.0°CA의 오차는 디젤엔진에서는 약 10% 정도, 가솔린 엔진에서는 약 4%[2]의 도시평균유효압력과 25%의 열발생 률의 오차를 유발하기 때문에 TDC의 위치는 최소한 0.1°CA각도 범위내의 정확 도를 확보하여야 한다. TDC는 크게 정적TDC(기하학적 TDC : 피스톤이 가장 상 부에 위치할 때의 지점을 다이얼 게이지를 이용하여 측정 와 동적) TDC(실린더
내 압력을 측정하여 압축압력의 피크 점 즉, 압축 TDC)로 나눌 수 있다. 일반 적인 TDC 계측방법은 실린더 헤드에 설치된 압력센서의 신호를 이용하는 것으 로 실린더 내 압력을 측정하여 압축압력의 피크(Peak) 점을 TDC 라고 추정하고 있다. 그러나 압축압력의 피크는 실린더 체적이 최저가 될 때 즉, 정적 TDC 보 다 먼저 도달 한다 이러한 차이를 크랭크 각으로 표현한 것을 손실각(Loss 이라 한다 angle) .[3],[4],[7~14] 손실각의 주 원인은 열전달에 의한 열손실과 블로바이 가스에 의한 질량손실 에서 기인하며, 대부분의 선행 연구에서는 열손실에 의한 영향이 더 크게 작용 하는 것으로 보고되고 있다. 또한 이러한 선행 연구에서는 주로 소형 고속엔진 을 대상으로 연구를 하였으며, 이러한 엔진은 연료를 차단하고 모터링 상태에 서 압축압력을 수집하여 측정하였다. 이것은 연소를 제거할 수는 있지만 열전 달의 영향을 제거하지 못하기 때문에 열전달 방정식을 통하여 해석하고 추정하 는 방법이었다. 종래의 기계식 지압기의 단점을 보안하기 위해 개발된 전자식 지압기(EMS, 는 시간기준 계측방법 으로 데이터를 수집하는 방법이며 이러한 방법 MIPS) ‘ ’ , 은 선박의 부하변동에 의한 회전수 변동으로 인하여 TDC 위치를 결정 할 때 오 차가 더 크지는 단점이 있다. 본 연구에서는‘각도기준 계측방법 이 상대적으’ 로 더 정확함을 실제 선박 엔진에서의 실험을 통하여 확인하였다.[15] 또한, 본 연구에서는 대형 저속 선박용 엔진을 대상으로 하였으며, 2000년 이후의 NOx 규제(Tier Ⅰ)를 적용받는 선박엔진으로 연료분사가 TDC 이후에 이 루어지므로 운전 중 실시간 압축압력의 피크를 수집할 수 있다는 점을 이용하 여 손실각을 계측할 수 있었다. 이렇게 계측된 손실각을 기초로 하여 선박엔진에 적합하다고 판단되는 의 열전달 방정식 Annand [16]을 이용하여 측정이 불가능한 블로바이 가스의 양을 예측할 수 있었다. 또한 압축압력을 실린더별로 수집하여 크랭크축의 비틀림을 측정할 수 있었으며, 이러한 비틀림의 발생이‘각도기준 계측방법’의 오차를 유발하게 됨을 알았다. 따라서 손실각을 보정함으로서 선박의 회전수 변동에 의한 영향과 크랭크축 비틀림에 의한 영향으로부터 무관한 데이터를 수집하여 출력을 측정하는‘향상된 시간기준 계측방법 을 고안하였으며’ , 그 신뢰성에 대하여 검증을 하였다.[17],[18]
출력측정에서 신뢰성은 무엇보다 중요한 것이 TDC의 정확한 결정이며, 신뢰 성 있는 데이터는 정밀도가 높은 연소해석을 가능하게 한다. 지금까지의 연구 를 통하여 엔진의 출력은 물론 연소해석에 필요한 데이터 계측장치와 해석을 위한 S/W를 개발하였다. 이 장치를 이용하여 현재 운항 중인 선박의 발전기용 과급 디젤엔진을 대상으로 부하별 실린더 내 압력을 계측하여 1 사이클 기간 중 압력의 변화를 고찰하고, 연소상태를 해석할 수 있었다. 또한 저 부하에서 연소특성을[19] 파악하고, 저 부하 영역에서의 연소 개선 방법에 대하여 고찰하 였으며, 이를 토대로 연소를 최적화 하여 연료소비율의 개선을 꾀할 수 있었 다.
연구 내용
1.2
본 연구는 대형 저속 선박용 2행정 엔진과 중속 발전기용 4행정 엔진을 대상 으로 하였다. 선박용 2행정 엔진은 2000년 이전에 건조된 선박의 엔진으로 연료분사시기가 전에 시작되는 엔진과 년 이후에 건조된 연료분사시기가 이후에 TDC 2000 TDC 분사하는 엔진으로 나누어 실험하였으며, 운항 중 실제 엔진의 데이터를 측정 하여 분석하였다. 본 연구 내용을 요약하면 다음과 같다. 제 2 장에서는 본 연구와 관계되는 왕복동 내연기관의 이론 관계식에 관하여 언급하였다. 즉, 크랭크 각도와 변위의 관계, 피스톤의 속도와 가속도, 크랭크 의 회전력, 왕복동 내연기관의 축 토크 변동의 기본 이론을 언급하였으며, 실 제 측정한 실린더 내 압력데이터를 이용하여 연소현상을 해석하기 위해 압력 변동률과 체적 및 체적 변동률을 구한 다음 연소가스 온도, 비열비, 열발생률 등의 관계식에 관하여 정리하였다. 제 3 장에서는 선박에서 이용되는 주 추진용 2행정 디젤엔진과 발전기용 디젤엔진의 정확한 출력산정에 요구되는 정확한 TDC의 위치를 실험적으로 측정하여 그 정확도에 영향을 미치는 인자들에 관하여 ‘시간기준 계측방법 과’ ‘각도 기준 계측방법’으로 나누어 각각의 특성에 대하여 고찰하였다. 제 4 장에서는 정적 TDC(기하학적 TDC)와 동적 TDC(압축압력의 피크 점 의 위) 치의 차이 즉, 손실각(loss angle)의 정의에 대하여 언급하였고, 선행 연구에 관한 자료 분석과 손실각에 영향을 미치는 인자에 대하여 열전달에 의한 열손 실과 블로바이 가스에 의한 질량손실에 대하여 수치적인 해석을 수행하였다. 제 5 장에서는 소형 고속엔진의 손실각을 실제로 측정하는 것은 열손실을 배 제할 수 없기 때문에 어려움이 있으나, 2000년 이후의 NOx 규제(Tier Ⅰ)를 적 용받는 선박엔진을 이용하여 손실각을 계측할 수 있었다. 또한 계측에 있어서 데이터 수집 간격의 중요성을 알았으며, 손실각 계측방법을 통하여 비틀림 측 정이 가능 하였다. 그리고 측정이 불가능한 블로바이 가스의 양에 대하여 의 열전달 경험식을 통하여 예측하였으며 비틀림 발생으로 각도기준 Annand , ‘ 계측방법 의 오차를 보완하는’ ‘향상된 시간기준 계측방법’을 고안하여 그 결 과에 대하여 검증하였다. 제 6 장에서는 앞 장에서의 데이터 수집에 대한 신뢰성을 확보한 계측방법으 로 연소해석에 필요한 데이터 계측장치와 해석을 위한 S/W를 개발하여 현재 운 항 중인 선박의 발전기용 과급 디젤엔진을 대상으로 부하별 실린더 내 압력을 계측하여 1 사이클 기간 중 압력의 변화를 고찰하여 연소상태를 해석하였고, 저 부하에서 연소특성을 파악하여 저 부하 영역에서의 연소 개선 방법에 대하 여 고찰하였으며, 이를 토대로 연료소비율의 개선을 꾀할 수 있었다. 제 7 장에서는 연구 내용에 대한 결과를 요약하였다.
제 2 장 이론 관계식
피스톤의 변위
속도와 가속도
2.1
,
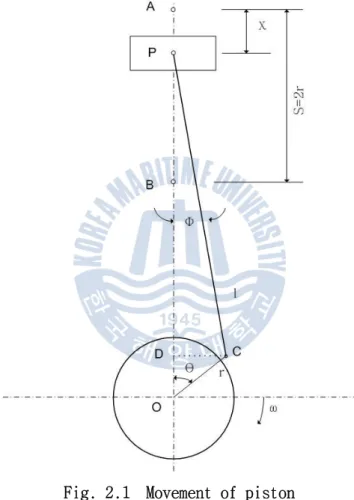
[20]Fig. 2.1 에서 상사점에서 아래 방향으로 피스톤의 변위를, 라 하면
Fig. 2.1 Movement of piston
여기서,
: 행정
: 연접봉의 길이 : 실린더 중심선에서의 크랭크 각도 : 연접봉 중심선에 대한 각도 여기서 라 하면 (2.1) 상식의 를 크랭크 각도 로 나타내기 위하여
의 관계를 식(2.1)에 대입하면
(2.2) 이므로,
⋯
⋯
⋯
⋯
⋯ (2.3) ∼로써 이상의 고차계수를 포함하는 항은 매우 작은 값으로 생략하면 ≒
(2.4) 피스톤 속도 [m/s]는 피스톤 변위 [m]를 시간에 대하여 미분하면 된다. 를 크랭크축 회전각속도 (rad/sec) , 라 하면
⋯
⋯
⋯
⋯ (2.5) 위 식에서 이상의 고차항을 생략하면 ≒
(2.6) 피스톤 가속도 [m/s2] 에 대해서도 식(2.5)로부터
⋯
⋯
⋯
⋯ (2.7)따라서 근사적으로, ≒
(2.8)크랭크축의 회전력
2.2
관성력에 의한 토크 (1) 피스톤, 연접봉 및 크랭크기구는 운전 중에 왕복질량 및 회전질량에 의한 상 하방향의 관성력을 갖는다. 실린더 하나의 전 왕복질량은 피스톤 및 그의 부착 질량과 연접봉의 왕복질량이 포함된다. 전 회전질량은 크랭크 핀 및 크랭크 암 의 상당질량과 연접봉의 회전질량을 포함한다. 전 왕복질량 = (피스톤, 피스톤 봉, 크로스헤드, 가이드 슈, 피스톤 냉 각제 등의 질량 + 연접봉의 왕복질량) 전 회전질량 = (크랭크 핀, 크랭크 암 등의 상당질량 + 연접봉의 회전 질량) 따라서 상하방향의 총질량 에 의한 관성력 은 임의 의 크랭크의 위치 에서 ≒
여기서, 이므로( : 회전수) ≒
(2.9) 인 상사점에서 관성력 는
이 되어 피스톤 운동을 방해하는 힘은 최대가 되고, 인 하사점에서는
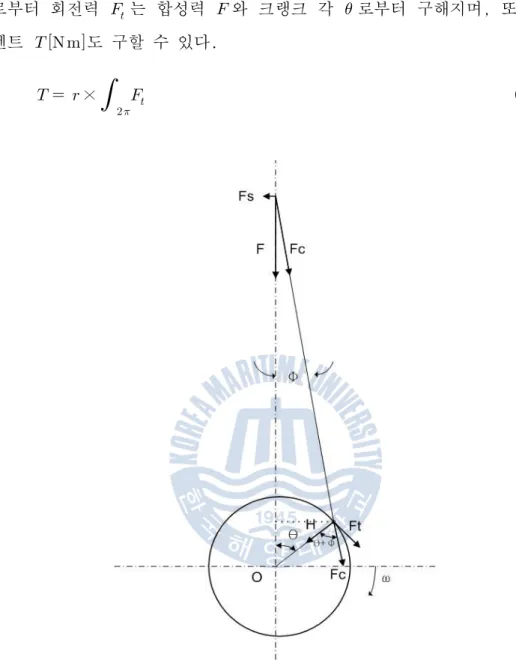
가 되어 피스톤 운동을 조장하는 힘이 최대가 된다. 이와 같이 피스톤의 왕복 운동에 대한 관성력의 영향의 크기는 크랭크 각도에 따라 변하며 이것과 가스 폭발력과의 합성력이 크랭크를 회전시키는 회전력이 된다. 가스압력에 의한 토크 (2) Fig. 2.2 에서 관성력 와 가스압력 때문에 피스톤에 작용하는 합성력 는 피스톤의 측면 압력 과 연접봉에 작용하는 힘 으로 나눌 수 있다. 크랭크 핀에 작용하는 힘 를 크랭크 암에 수평한 힘과 수직한 힘으로 나누면 수평분력 는 크랭크 핀을 베어링에 억누르는 힘에 불과하나 수직분력 접선방향( ) 는 회전력으로서 유효하게 작 용한다.
(2.10) 를 크랭크 각 로 나타내면 로부터
이므로
(2.11)이로부터 회전력 는 합성력 와 크랭크 각 로부터 구해지며, 또한 회전
모멘트 도 구할 수 있다.
×
(2.12)
Fig. 2.2 Turning force of crank shaft
왕복동 내연기관의 축 토크 변동 (3) 왕복동 내연기관의 토크 는 실린더내의 가스압력에 의하여 발생하는 토크 와 회전관성력에 의한 토크 로 구분할 수 있다.[21]
(2.13)여기서, : 실린더 번호, : 실린더 수 회전 운동하는 왕복동 내연기관의 축계 운동방정식은 다음과 같이 나타낼 수 있다. (2.14) 여기서, : 축의 질량관성모멘트 : 각속도 : 엔진발생 토크 : 프로펠러 구동 토크 순간토크의 변동 값을 구하기 위해 회전속도에 대한 크랭크 각 로 전개하면 (2.15) 을 위 식에 대입하여 전개하면
(2.16) 결국 토크 변동값는 가스압력과 관성력에 의해서 발생하는 에서 프로펠러의 회전 토크를 빼준 값이다. 따라서 회전속도의 변동이 없으면 즉, 일정한 속도로 운전 중일 때는 각가속도 는 이 되므로 이 된 다. 이 때 정속토크 토크의 평균값( )는 다음과 같이 된다. (2.17) 따라서, 에 대한 축 토크 는 다음과 같이 계산할 수 있다. (2.18)연소해석
2.3
열발생률 2.3.1 연소실 내에서 일어나는 연소에 의한 열발생률은 측정한 실린더 내 압력 데 이터를 이용하여 구할 수 있다. 과급 디젤엔진의 연소과정은 연소에 관계하는 인자가 많고 이들 인자들이 서로 복잡한 상관관계를 가지고 있으며 그간 많은 연구에도 불구하고 아직도 불분명한 인자들이 많아 그 연소과정을 정확히 해석 하는 것에는 어려움이 있다. 따라서 실린더 내의 연소과정을 열발생률을 이용 하여 해석하는데, 이 열발생률을 구하기 위하여 다음과 같이 가정한다. 연소실 내의 작동유체는 이상기체이다 (1) . 공기와 연료는 완전하게 혼합한다 (2) . 가스의 질량은 일정하다고 본다 즉 가스의 누설은 없다 (3) ( , ). 실린더 벽 온도는 사이클 중 일정하다 (4) 1 . 연소현상을 해석하기 위해 먼저 압력 변동률과 체적 및 체적 변동률을 구한 다음, 실측한 실린더 내 압력데이터를 이용하여 연소가스 온도, 비열비, 열발 생률을 계산한다. 압력 및 압력 변동률 (1) 압력 변동률 는 연소상태를 판단하는 중요 자료가 된다. 착화지연 기간 은 연료분사 시기로부터 착화가 시작될 때까지의 기간이며 착화지연 기간이 길 어지게 되면 착화 전에 형성되는 가연 혼합기의 양이 증가하여 폭발적 연소기 간 중 한꺼번에 연소하기 때문에 급격한 압력 상승을 일으켜 디젤노크(Diesel 를 일으키게 된다 knock) . 압력 변동률은 실린더 내의 압력을 크랭크 각 0.5도 또는 1도 간격으로 측정하여 이를 3 Point Smoothing을 1회 한 후, 다음 식(2.19)와 같은 Stirling
보간공식으로 구할 수 있다.[22]
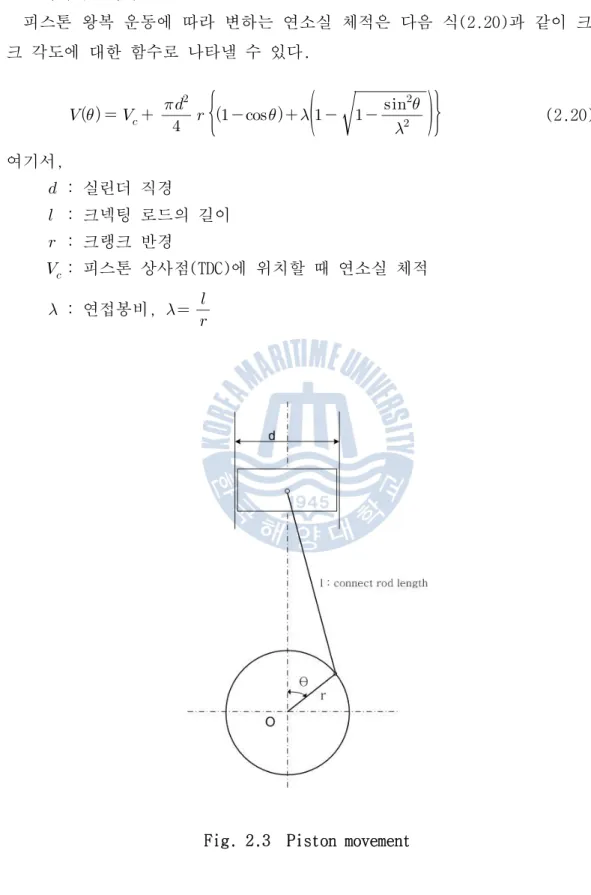
(2.19)체적 및 체적 변동률 (2) 피스톤 왕복 운동에 따라 변하는 연소실 체적은 다음 식(2.20)과 같이 크랭 크 각도에 대한 함수로 나타낼 수 있다.
(2.20) 여기서, : 실린더 직경 : 크넥팅 로드의 길이 : 크랭크 반경 : 피스톤 상사점(TDC)에 위치할 때 연소실 체적 : 연접봉비, 피스톤이 상사점(TDC)에 위치할 때 연소실 체적 는 행정체적 와 압축비
의 함수이고 다음과 같다. (2.21) 위 식(2.21)을 크랭크 각도에 따라 미분하면 다음 식과 같이 체적 변동률을 구할 수 있다. ×
(2.22) 연소가스 온도 (3) 연소가스 온도는 연소실 내의 작동유체가 압력과 온도가 균일한 상태이며, 이상기체라 가정하였으므로 아래의 식(2.23)과 같이 이상기체의 상태방정식으 로부터 구할 수 있다. (2.23) 본 연구에서는 가스 중량 는 측정하지 않았으므로 실험 엔진의 체적효율을 로 가정하여 80% [23] 이에 해당하는 가스 중량의 값을 계산에 이용하였다. × (2.24) 여기서, : 초기 압력 : 가스 정수, : 초기 온도비열비 계산 (4) 정압비열과 정적비열의 비로 정의되는 비열비
는 식(2.23)을 통해 구한 온 도를 이용하여 아래의 식으로 나타내었다. (2.25) 여기서, × × × : 공기과잉률 실제 공급한 공기량은 온도가 27℃ 이고, 부하별 과급압력 하에 체적효율 80% 로 가정하여 구하였으며, 이론적 공기량은 디젤유 1kg당의 이론적 공기량인 을 사용하였다 14.5㎏ . 열발생률 계산 (5) 연료에 의해 실린더 내로 공급되는 에너지 중 일부분은 필요한 동력인 기계 적인 일로 변환되고 일부분은 배기가스의 형태로 과급기를 거쳐 흡입공기를 공 급함으로써 환원된다. 또한 일부 에너지는 실린더 벽으로 열전달 됨으로써 빠 져나가게 된다. 여기서 연료의 연소에 의해 발생되는 총 열발생률을 구하면 다 음과 같다. (2.26) 여기서, 총 열발생률에서 열손실률을 감한 : 열발생률 실린더 벽으로 손실되는 열손실률 :상기 식 중 총 열발생률에서 열손실률을 뺀 열발생률 를 내부에너지와 기계적인 일로 나타내면 다음과 같다. (2.27) 내부에너지 가 실린더 내 가스온도만의 함수라고 가정하면, 정적비열은 이므로 아래와 같이 된다. (2.28) 기계적인 일 를 체적변화와 실린더내 압력으로 나타내면 다음과 같이 된다. (2.29) 여기서 식, (2.28)과 (2.29)를 식(2.27)에 대입하면 다음과 같이 된다. (2.30) 상기 식(2.30)을 크랭크 각도변화에 대한 압력 변동률 와 체적 변동률 에 관한 식으로 정리하기 위해 이상기체 방정식 를 크랭크 각도로 미분하면 아래의 식이 구하여진다. (2.31) 식(2.31)을 식(2.30)에 대입하고 정리하면 다음과 같이 된다.
(2.32)열손실률 2.3.2 엔진에서 통상 연료의 연소에 의해 발생하는 총에너지의 상당량이 열전달에 의해 손실된다. 과거에는 열손실이 30% 이상이었으나[23] 현재는 10~15% 에 달하 는 것으로 보고되고 있다. 열전달의 형태는 전도(conduction), 대류 그리고 복사 의 형태로 나타난다 열전달을 통해 손 (convection), (radiation) . 실되는 열손실률은 다음 식을 이용하여 구할 수 있다.
(2.33) 여기서, : 연소실을 구성하는 면적 성분(=1,2,3) : 연소실 가스 온도 : 연소실을 구성하고 있는 면적 성분의 온도(=1,2,3) 내연기관의 열전달은 현상이 복잡하고 영향을 주는 인자가 많으므로 정확히 표현하기가 매우 난해하다. 그래서 많은 학자들이 열전달 현상에 대해 연구를 거듭하였으며 상기 식(2.33)에서 열전달계수 에 관하여 많은 식들이 발표되 었다.발표된 실험식 중 주로 사용되는 식은 Nusselt, Eilchelberg, Pflaum,
의 실험식 등이 있다 각각의 실험식들은 실린더 내
Sitkei, Annand, Woschni .
가스 압력 , 가스 온도 , 및 평균 피스톤 속도 을 변수로 두고 그 외 중 요도가 낮은 인자의 경우 정수로 표현하였다. 는 구형 용기를 물에 담가 고온가스의 냉각 경계부 열량을 계측하는 Nusselt 방법으로 열전달계수를 구하였다.[24] 그리고 연소 반응물로부터 전달되는 복사 열전달 이론을 고려하고 4행정 가솔린 엔진으로부터의 실험 결과에 따른 피스 톤 속도를 수정하여 다음 식을 발표하였다.
× (2.34)는 행정 디젤엔진을 이용하여 피스톤 실린더 및 실린더 헤드의 각 Eichelberg 2 , 온도를 측정하고 온도 변화로부터 열량을 구해 아래의 식(2.35)를 제안하였 다.[25] (2.35) 은 식 의 실험식에 보완을 위해 고과급 디젤엔진을 이 Pflaum (2.35) Eichelberg 용하여 실험을 하고 그 결과로써 다음의 식을 제안하였다.[26]
(2.36) 여기서, 실린더에 대한 정수 : 실린더 헤드 피스톤에 대한 정수 : , : 과급 압력 : 대기압 년 는 디젤엔진에 대하여 다음 식을 제안하였다 1962 Sitkei .[27]
(2.37) 여기서, : 상수, 연소실 형상에 따라 서로 다른 값을 가진다. : 연소실 전열면적 : 피스톤 상부로부터 실린더 헤드까지의 높이 : 실린더 용적 그리고 식(2.37)의 우변 두 번째 항은 복사 관련 항이다. 는 기존에 발표된 실험식을 상세히 검토하여 년에 다음 식을 발표 Annand 1963 하였다.[16] × (2.38) 여기서, : 실린더 지름 : Reynolds 수 : 열전도율 는 연소에 의한 영향을 고려하여 년 다음 식을 제안하였다 Woschni 1967 .[28]
(2.39) 상기 식에서 정수 값인 는 흡기, 배기 과정에서는 , 이고 압축, 팽창 과정에서는 , × 이다. 그리고 은 연소 없이 일어나는 압력 모터링 압력 을 나타내며( ) , , 의 아래첨자 2는 연소 직전의 시기를 나타낸다. 지금까지 설명한 열전달계수에 대한 각각의 실험식 중 대상 엔진이 선박용 엔진임을 고려하여 볼 때 Nusselt 의 식은 열손실 형태가 다르며, Sitkei 식은 다른 식에 의한 계산값과 비교해 볼 때 큰 차이를 보이며,[29] Woschni식은 연 소 없이 일어나는 압력을 고려해야 하므로 계산상 어려움이 있다. Eichelberg, Pflaum, Annand 식 중 복사항과 분리하여 계산하는 Annand 의 식이 가장 효과적 일 것으로 판단된다. Annand 의 실험식에서 복사에 의한 열손실이 전도에 의한 열손실의 10% 미만 이며,[30] 다른 열손실에 비해 매우 적음을 고려하여[31] 복사에 의한 열손실은 고려하지 않았다. 본 연구에서는 다음의 식(2.40)을 이용하였다. (2.40) 여기서, : 실린더 지름 : 연소실을 구성하는 면적 성분(=1,2,3) : Reynolds 수 : 연소실을 구성하고 있는 면적 성분의 온도(=1,2,3) : Annand의 열전달계수 : 열전도율 열전도율 와 Reynolds 수 는 다음 식으로 정의된다. (2.41) (2.41) 여기서, : 분당 회전수 : 행정 : 점성계수 : 가스밀도 상기 식(2.41)과 (2.42)에서 점성계수 는 다음 식을 이용하여 계산하였다.
(2.43) 여기서, 1.71×10-7 [㎏/(㎝·sec)] 기준상태(273[K], 절대압력 1.0332[㎏f/ ])㎠ [32] 가스밀도 는 이상 기체 방정식으로부터 아래와 같이 계산하였다. 식(2.33)에서 연소실을 구성하는 면적 성분 (i=1,2,3)는 다음과 같이 구하 였다. 즉, 실린더 헤더와 피스톤 크라운의 표면적은 실린더 직경을 기준으로 구하였다. 실린더 헤드 : 피스톤 크라운 : : 실린더 라이너
(2.45) 여기서, : 크랭크 반경 : 피스톤 상사점에서의 실린더 헤드와의 간극 : 크랭크 각도별 피스톤과 실린더 헤드와의 간극 : 연접봉비제 3 장 기존의 엔진출력 측정 방식과
TDC
위치의 영향
서 언
3.1
엔진의 출력을 얻는 방법으로는 실린더 내 압력을 직접 측정하여 얻는 방 법과 추진축에서 토크를 직접 측정하는 방법이 있다.[33] 실린더 내 압력을 통해 얻을 수 있는 정보는 엔진출력 이외에도 평균유효압력, 사이클 변동, 노킹 및 착화실패의 확인, 열발생률 및 연소가스 평균온도 등이다.[34~36] 따 라서 실린더내 압력의 정확한 취득은 출력산정 및 엔진의 운전상태 파악에 기본적인 요소이다.[5],[37] 최근에 건조되는 선박의 경우 각종 감시 및 진단장치를 설치하고 있으며, 주기관의 성능을 분석하는 MIPS(Mean Indicated Pressure System)도 그 주요항목 중 하나이다. 그러나 EMS(Engine Monitoring System)에서 계측 및 산
출된 지시마력(IHP)과 기계식 지압기에 의한 지시마력 사이에는 상당한 차 이를 보이는 것으로 알려져 있으며, 운항 중인 선박에서는 아직도 기계식 지압기의 결과를 신뢰하고 있는 실정이다. 기존의 MIPS의 방법은 플라이휠에 근접센서를 설치하여 회전수를 검출하 고, 검출된 회전수에서 일정한 시간 간격으로 나누어 내부 클럭(clock)신호 를 발생시켜 연소압력 데이터를 수집하며, 이 클럭 신호를 크랭크 각도로
간주하는 방법이다. 이러한 MIPS 방법은‘시간기준 계측방법(time based
으로 순간속도변동을 고려하고 있지 않기 때문에 실제의 크랭크 sampling)’ 각도와는 차이가 있게 되고, 특히 피스톤의 TDC 위치를 부정확하게 인식함 으로서 결과적으로 디젤엔진의 정확한 출력산정을 곤란하게 하는 원인으로 확인되었다.[21] 본 연구에서는 선박에서 사용되는 추진용과 발전기용 디젤엔진의 정확한 출력산정에 요구되는 정확한 TDC의 위치 측정에 영향을 미치는 인자들에 관 하여 실험을 통하여 고찰하였다. 즉, 디젤엔진의 순간속도변동과 부하변동 에 의한 회전수 변동이 TDC 위치에 미치는 영향을 분석하였다. 그 결과 기
존의 MIPS의 방법으로는 디젤엔진의 출력을 정확하게 산정하기에는 한계가 있음이 분명히 파악되었다.
실험장치 및 실험방법
3.2
실험은 두 선박의 주기관 및 발전기 엔진을 대상으로 하였다. 두 선박의 주 기관은 6실린더 2행정 과급 디젤엔진이고, 발전기용 보조기관은 5실린더 4행정 과급 디젤엔진이다. 각 엔진의 주요사항을 Tables 3.1, 3.2 에 보여주고 있으 며, Figs. 3.1, 3.2 에 각각 주기관과 발전기 엔진의 실험장치 개략도를 보여 주고 있다. 본 실험에서는 엔코더(encoder)를 이용하여 정확한 실린더내 압력 을 얻고자 하였다. 엔코더는 설치여건을 고려하여 A 엔진은 크랭크축 끝단, B 엔진은 윤활유 주유기(lubricator) 구동축 끝단에 설치하였다. 즉, 주기관 B는 윤활유 주유기 구동축 끝단에 720펄스 엔코더를, 주기관 A 및 발전기용 엔진은 크랭크축 끝단에 360펄스 엔코더를 각도센서로 설치하여 실험을 하였다. 또한 실험은 엔진 1회전에 1회 펄스를 발생하는 엔코더의 Z펄스를 측정하고 자 하는 실린더의 TDC에 맞추고, 1회전에 360 또는 720펄스를 발생하는 A 혹은 펄스를 트리거 로 연소압력을 샘플링 하는 방법과 펄스의 시간간격 B (trigger) Z 으로부터 회전수를 감지하여 1회전을 일정한 수집 시간간격으로 나누어 내부 클럭 신호를 주는 방법을 각각 이용하였다. 여기서는 전자를‘각도기준 계측방법(angle based sampling)’, 후자를‘시간기준 계측방법(time based
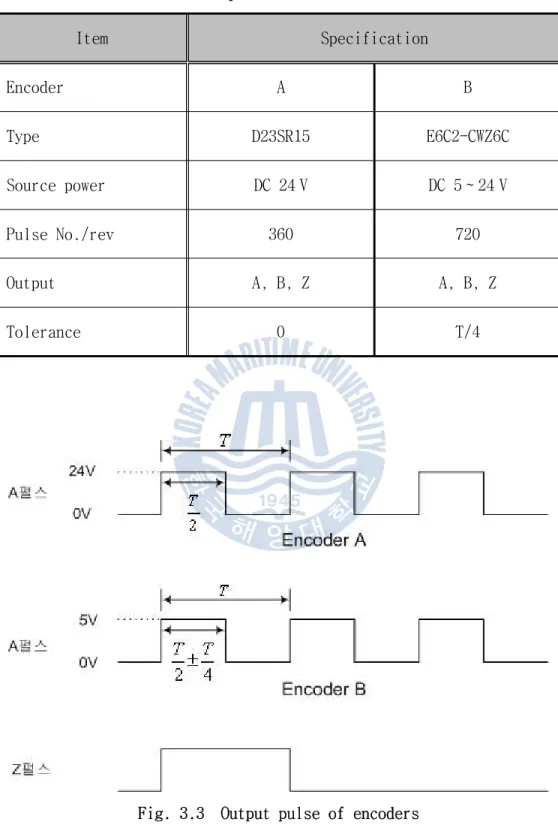
이라 하기로 한다 후자의 시간기준 계측 sampling)’ . 방법은 기존의 MIPS의 방 법과 동일한 방법이다. 엔코더는 Photos 3.1, 3.2 에서 각각 윤활유 주유기와 크랭크축 끝단에 설치 된 사진을 보여주고 있으며, Table 3.3 에서는 각 엔코더의 사양을 Fig. 3.3 에 서는 엔코더의 출력파형을 보여주고 있다.
Item Specification
Engine A B
Type of engine 2-stroke, single acting
diesel engine with T/C
No. of cylinder 6
Bore / stroke 420 mm / 1360 mm 350 mm / 1050 mm
Compression ratio 12.71 12.96
NCR
(Normal Continuous Rating) 6,911BHP/167rpm 3,400BHP/190rpm MCR
(Max. Continuous Rating) 8,130BHP/176rpm 4,000BHP/200rpm Table 3.1 Specification of main engines for test
Item Specification
Engine type 4-stroke, single acting
diesel engine with T/C
No. of cylinder 5
Bore / stroke 225 mm / 300 mm
Compression ratio 13.0
Output 725 BHP at 720 rpm
Fig. 3.1 Schematic diagram of experimental apparatus for M/E
Photo 3.1 Installation of encoder at lubricator shaft of M/E
Item Specification Encoder A B Type D23SR15 E6C2-CWZ6C Source power DC 24 V DC 5 ~ 24 V Pulse No./rev 360 720 Output A, B, Z A, B, Z Tolerance 0 T/4
Table 3.3 Specification of encoders
Photo 3.3 에서는 엔코더 B 출력파형의 오실로스코프 사진을 보여주고 있으 며, Table 3.3 과 Fig. 3.3 에서 나타낸 엔코더 B 출력파형의 오차를 이 사진에 서 잘 보여주고 있다. 사진에서 보는바와 같이 출력의 A 펄스는 B 펄스의 상승 에지(edge)에 의해 영향을 받고 B 펄스는 A 펄스의 하강 에지에 의해 영향을 받는 것을 알 수 있다. 이러한 영향은 약 T/4 의 주기로 일어나고 있다는 것을 사진을 통하여 확인 되고 있다.
Photo 3.4 와 Photo 3.5 는 각각 엔코더 A와 B의 채터링(chattering)오차에 대한 오실로스코프 사진을 보여주고 있다. Table 3.4 에서는 회전수 720 rpm 의 발전기 엔진의 데이터를 수집할 때 채터 링 오차에 의해서 발생할 수 있는 크랭크 각 1.0°CA의 오차를 두 엔코더에 대 하여 계산하였다. 여기서 엔코더 A가 엔코더 B보다 약 80배 정도 더 정확하다 는 것을 알 수 있지만, 엔코더 B의 채터링에 의해서 일어나는 오차도 무시할 수 있을 정도임을 알 수 있다. 그러나 이러한 채터링은 트리거 신호로 사용될 때 수없이 반복되는 On-Off의 반복 신호가 트리거로 사용될 수 있기 때문에 필 터링을 통하여 채터링을 제거하는 것이 무엇보다 중요하다. 본 연구에서는 채터링에 대하여 필터를 사용하여 신호처리를 하였으며, 오차 의 정도에 따른 필터링의 정도가 달라지기 때문에 엔코더가 가지고 있는 오차 는 없어지지 않는다. 따라서 정밀도에 따라서 엔코더 가격의 차이가 크게 나기 때문에 실험에 맞는 범위 내에서 적합한 엔코더를 선택하는 것이 중요하다.
Photo 3.3 Oscilloscope CRT view of encoder B for output pulse error
Photo 3.5 Oscilloscope CRT view of encoder B for chattering error Chattering time (a) ms/deg (720rpm) (b) Error by chattering (a/b) Ratio of errors by encoders (B/A) Encoder A 0.125㎲ 0.2315ms 0.00054°CA 80 Encoder B 10㎲ 0.2315ms 0.043°CA
엔진의 순간속도변동 계측 및 고찰
3.3
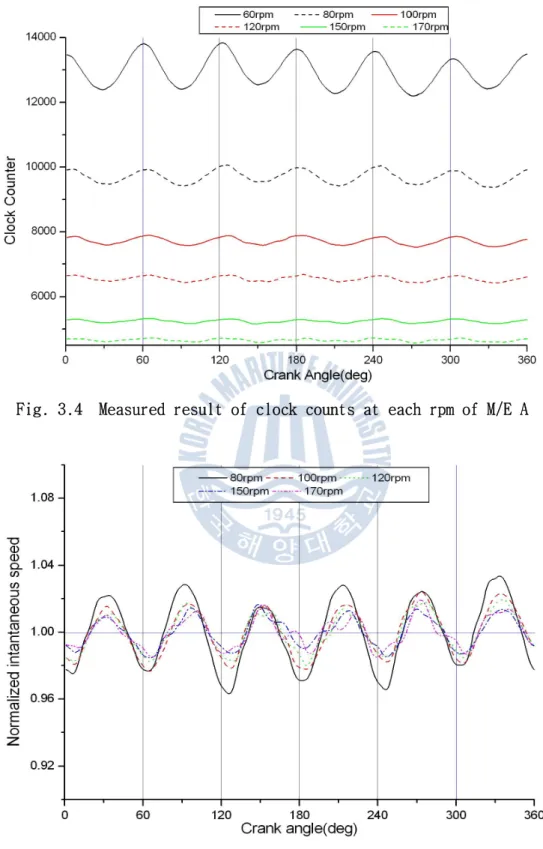
Fig. 3.4 는 주기관 A의 80~170rpm 범위에서 각 회전속도별 순간속도변동을
측정한 결과를 나타낸다. 크랭크 각 CA당 내부 클럭(internal clock)에 의
한 카운트(count) 수를 5점 평활화(5 point FFT smoothing) 처리하여 보여주
고 있다. 그림으로부터 2행정 6실린더 엔진이므로 1 사이클 동안 6번의 속도 변동이 나타나고, 각 실린더 TDC 부근의 압축행정에서 속도가 느리고, 팽창행 정에서 속도가 빠르게 나타남을 확인할 수 있다. Fig. 3.5 는 순간속도의 계측결과를 평균속도와의 비()로 나타낸 것이다. 회전속도가 증가함에 따라 속도변동폭이 감소하고 있음을 알 수 있다6). 은 식(3.1)과 같이 정의 하였다. (3.1) Fig. 3.6 은 주기관의 경우 엔진 회전속도에 따른 속도변동의 정도를 나타낸 것이다. 횡축은 엔진 최대회전수(MCR :Maximum Continuous Revolution)에 대
한 속도비로 종축은 식(3.2)로 정의되는 속도변동비으로 나타내었다. × (3.2) 회전속도가 증가할수록 속도변동비가 감소하고, 가 80~85% 부근에서 최 소가 됨을 알 수 있으며, 이 경향은 두 엔진 모두 같게 나타났다. 이는 엔진의 회전속도가 증가함에 따라 관성력의 영향이 크게 되기 때문으로 판단된다.
Fig. 3.4 Measured result of clock counts at each rpm of M/E A
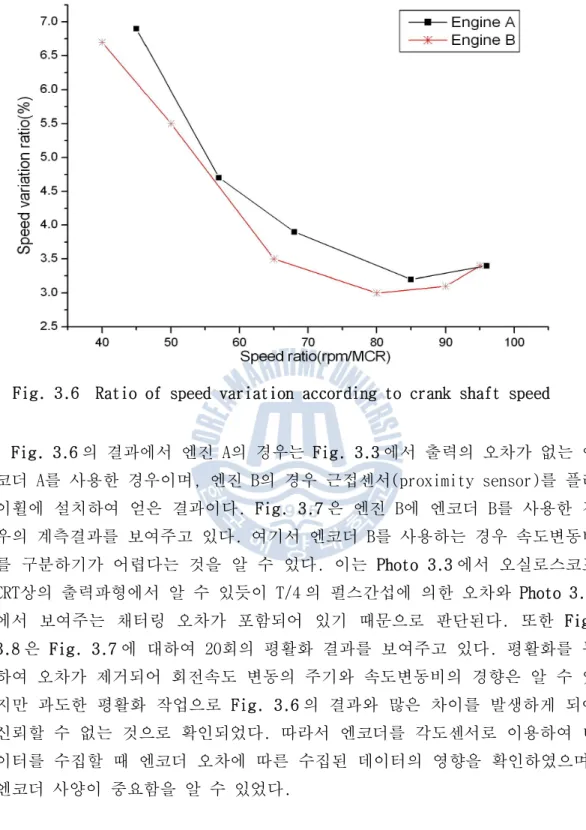
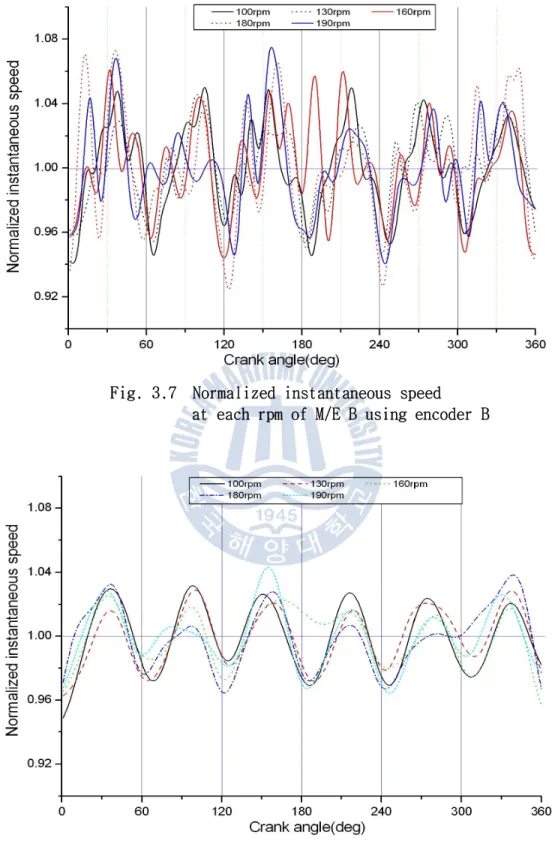
Fig. 3.6 Ratio of speed variation according to crank shaft speed Fig. 3.6 의 결과에서 엔진 A의 경우는 Fig. 3.3 에서 출력의 오차가 없는 엔 코더 A를 사용한 경우이며, 엔진 B의 경우 근접센서(proximity sensor)를 플라 이휠에 설치하여 얻은 결과이다. Fig. 3.7 은 엔진 B에 엔코더 B를 사용한 경 우의 계측결과를 보여주고 있다. 여기서 엔코더 B를 사용하는 경우 속도변동비 를 구분하기가 어렵다는 것을 알 수 있다. 이는 Photo 3.3 에서 오실로스코프 상의 출력파형에서 알 수 있듯이 CRT T/4 의 펄스간섭에 의한 오차와 Photo 3.5 에서 보여주는 채터링 오차가 포함되어 있기 때문으로 판단된다. 또한 Fig. 3.8 은 Fig. 3.7 에 대하여 20회의 평활화 결과를 보여주고 있다. 평활화를 통 하여 오차가 제거되어 회전속도 변동의 주기와 속도변동비의 경향은 알 수 있 지만 과도한 평활화 작업으로 Fig. 3.6 의 결과와 많은 차이를 발생하게 되어 신뢰할 수 없는 것으로 확인되었다. 따라서 엔코더를 각도센서로 이용하여 데 이터를 수집할 때 엔코더 오차에 따른 수집된 데이터의 영향을 확인하였으며, 엔코더 사양이 중요함을 알 수 있었다.
Fig. 3.7 Normalized instantaneous speed at each rpm of M/E B using encoder B
Fig. 3.9 는 발전기 엔진에 대하여 부하에 따라 Fig. 3.5 와 같은 방법으로 발전기 엔진의 순간속도의 계측결과를 평균속도와의 비로 나타낸 것이다. 주기 관의 경우와 비교하기 위하여 같은 스케일로 보여주고 있다. 본 실험의 발전기 는 720rpm으로 주기관(A:176rpm, B:200rpm)에 비해 고속이기 때문에 속도변동 폭이 작음을 알 수 있다. 즉, 발전기용 엔진의 경우 순간속도변동 및 부하변동 의 영향은 무시할 정도로 작다는 것을 확인할 수 있다.
Fig. 3.9 Normalized instantaneous speed at each load of G/E
속도변동과 부하변동이
위치 측정에 미치는 영향
3.4.
TDC
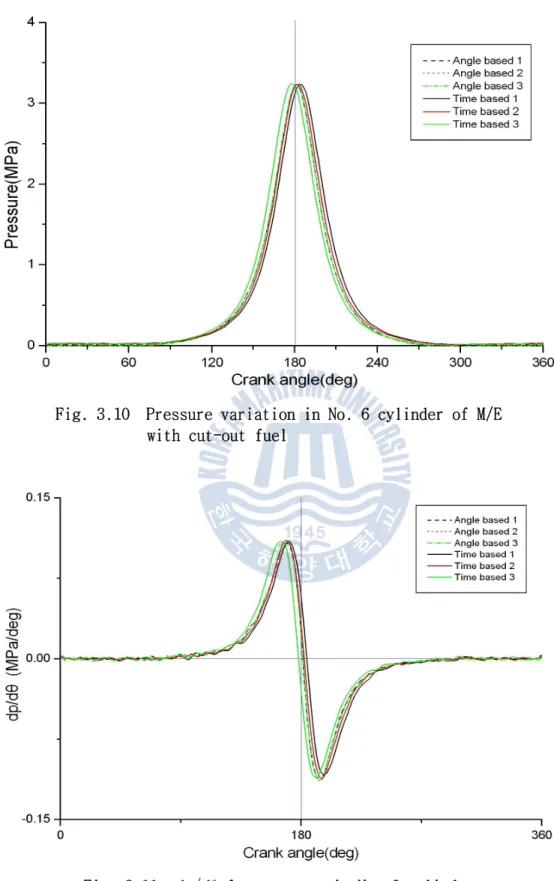
엔진의 출력산정에서 TDC 위치의 정확한 계측이 매우 중요하다. 정확한 TDC 위치를 확인하기 위하여 연료를 차단하고 압축과 팽창과정의 압력데이터를 취 득하였다. 정확한 TDC 위치는 압축압력의 피크 점(peak point 즉, )이며, 이는 압축압력을 미분함으로써 얻을 수 있다. 실험은 2행정 주기관의 최저 회전수(80rpm)에서, 4행정 발전기 엔진은 무부하 상태에서 수행하였다. 또한 엔코더의 Z펄스를 각 엔진의 최종 실린더인 주 기관은 6번 실린더, 발전기엔진은 5번 실린더에 설치하였고, Z펄스를 시작신호 로 하여 1 사이클씩 각 3회의 데이터를 수집하였다. Fig. 3.10은 연료를 차단하고 Z펄스를 시작신호로 하여‘각도기준 계측방 법’과 시간기준 계측방법 으로 각각‘ ’ 1 사이클 동안 계측한 압축압력(Pcomp) 을 각각 3회 수집하여 나타낸 것이다. Fig. 3.11은 정확한 TDC 위치를 판단하 기 위하여 Fig. 3.10의 계측결과를 미분하여 나타낸 것이다. 여기서 미분은 보간공식을 사용하였다
Stirling .[22] 또한, Fig. 3.12는 Fig. 3.11의 결과 중
인 부분, 즉 TDC 부근을 확대한 것이며, Fig. 3.13 은 같은 방법으로 발전기 엔진의 경우를 나타낸 것이다. 그림에서‘각도기준 계측방법’의 경우는 주기관과 발전기 엔진의 경우 모두 회의 데이터가 일치하고 있음을 알 수 있다 그러나 시간기준 계측방법 의 3 . ‘ ’ 경우는 Fig. 3.12 로부터 알 수 있는 바와 같이 주기관의 TDC의 위치가 불규칙 하게 변함을 알 수 있다. Fig. 3.13 은 발전기 엔진의 경우를 나타낸 것으로 시간기준 계측방법 은 각도기준 계측방법 의 경우에 비하여 항상 뒤에 나 ‘ ’ ’ 타남을 알 수 있다. 즉, TDC는 압축과정의 말기에 오기 때문에 앞에서 언급한 순간속도의 변동에서 알 수 있듯이 실제 크랭크 속도는 압축과정에서 느리고, 팽창과정에서 빨라지므로 시간으로 일정하게 나누어 그 시간을 크랭크 각으로 간주하면 실제 크랭크 각보다 TDC 위치가 더 빠른 시기로 인식되기 때문에 정 확한 TDC 위치보다 앞선 위치에서 검출되게 된다. 이상의 검토결과를 이용하면, Fig. 3.12 의 주기관에서도 시간기준 계측방법 의 경우 TDC 위치는 뒤에 위치하여야 할 것으로 판단되나, 앞에 위치하는 경우 도 있어 정확한 TDC의 위치가 불규칙하게 나타나고 있다. 이것은 해상 상태에 따른 부하변동의 영향이 크게 작용하기 때문이라고 판단된다. 즉, 주기관의 회 전속도의 변동은 엔진 토크의 변동에 의한 순간속도 변동성분과 해상 상태 등 의 부하변동에 의하여 발생하는 속도 변동성분에 의한 것이며, 이 두 성분의 영향을 각각 고려하여야 한다고 판단된다.
Fig. 3.10 Pressure variation in No. 6 cylinder of M/E with cut-out fuel
Fig. 3.12 Enlargement of for Fig. 3.11
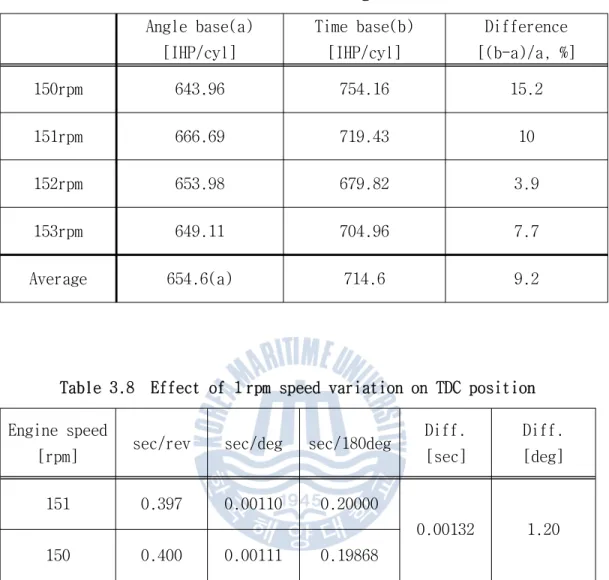
Tables 3.5 ~ 3.7 은 각 실험엔진에 대하여 각도기준 계측방법과 시간기준 계 측방법으로 각각 3회 측정한 P-V선도로부터 산출한 지시마력의 출력결과를 나 타낸 것이다. Table 3.5 는 발전기 엔진의 경우의 결과를 보여주고 있다. 이 때 엔진의 부 하는 75%(360kW) 이며, 부하변동이 거의 없는 상태로 운전하였다. 여기서 각도 기준 계측방법의 경우 3회의 각각의 출력 값이 평균값과 비교하여 각도기준 계 측방법은 최대 약 3% 범위내의 값을 보이고 있음을 알 수 있다. 발전기 엔진은 통상 주파수의 변화가 0.03Hz 정도의 범위 내에서 변동하므로 회전수의 변화 는 1 rpm 이하의 범위에서 변동하며, 720rpm에서의 1 rpm은 무시할 정도의 변 화이므로 이 경우 rpm 변동은 무시할 수 있다고 판단된다. 그러나 시간기준 계측방법의 경우 평균 출력은 각도기준 계측의 평균 출력보 다 9.2%정도 크게 나타난다. 임의적으로 TDC 1°CA의 오차에 의해 계산된 출력 은 약 8%정도 였음을 감안하면 시간기준 계측의 경우 실제 크랭크 각도보다 약 CA 정도 더 빨리 도착하게 된다고 추정할 수 있다. 이러한 결과는 앞에서 언급한 바와 같이 순간속도 변동의 영향에 의한 결과임을 잘 나타내고 있다고 판단된다. Table 3.6 은 주기관 B에 대하여 각도기준 계측방법과 시간기준 계측방법에 의한 지시마력의 산출결과를 보여 주고 있다. 여기에서도 각도기준 계측방법의 경우는 약 1% 오차범위내에서 거의 일치하 는 결과를 보여주고 있다. 시간기준 계측방법의 경우는 대부분 큰 값을 나타내 고 있으나 작은 값을 나타내는 경우도 있다. 그 차이는 주기관 B의 경우 각도 기준 계측방법의 평균값과 비교하여 -8.9 ~ 4.5% 범위에서 불규칙하게 변화하 고 있다는 것을 알 수 있다. Table 3.7은 주기관 A의 경우로 항해 시 가장 빈번하게 사용하는 엔진 회전 수 영역인 150rpm에서 무작위로 약 30회의 데이터를 수집하여 엔진회전수 변화 를 확인한 결과 150 ~ 153 rpm (3rpm 차이) 범위에서 변화하고 있음을 확인할 수 있었으며, 이 때 지시마력 산출결과를 엔진회전수 별로, 그리고 각도기준 계측방법과 시간기준 계측방법으로 각각 구분하고 비교하여 나타낸 것이다. 여기서도 각도기준 계측방법의 경우는 약 2% 범위 내에서 거의 일치하고 있으
나 시간기준 계측방법의 경우 각도기준 계측방법의 평균값과 비교하여 3.9 ~ 범위 내에서 불규칙하게 변함을 알 수 있다 15.2% . 주기관에서 엔진 회전수 변화는 부하변동을 의미한다. 해상에서는 파도, 조 류, 바람 등의 다양한 해상상태에 따라 항상 부하변동이 있으며 양호한 해상상 태일지라도 이의 영향을 무시할 수 없음을 나타낸다고 판단된다. Measuring order Angle base(a) [IHP/cyl] Time base(b) [IHP/cyl] Difference [(b-a)/a, %] 1 101.15 106.81 5.6 2 99.55 111.16 11.7 3 102.71 113.32 10.3 Average 101.14 110.43 9.2
Table 3.5 Calculated IHP of G/E for 75% load at 720rpm
Measuring order Angle base(a) [IHP/cyl] Time base(b) [IHP/cyl] Difference [(b-a)/a, %] 1 528.94 478.15 -8.9 2 522.36 548.85 4.5 3 523.80 533.85 1.7 Average 525(a) 520 -1.0
Angle base(a) [IHP/cyl] Time base(b) [IHP/cyl] Difference [(b-a)/a, %] 150rpm 643.96 754.16 15.2 151rpm 666.69 719.43 10 152rpm 653.98 679.82 3.9 153rpm 649.11 704.96 7.7 Average 654.6(a) 714.6 9.2
Table 3.7 IHP of engine A
Engine speed
[rpm] sec/rev sec/deg sec/180deg
Diff. [sec] Diff. [deg] 151 0.397 0.00110 0.20000 0.00132 1.20 150 0.400 0.00111 0.19868
Table 3.8 Effect of 1 rpm speed variation on TDC position
Table 3.8은 주기관이 부하변동의 영향으로 회전속도가 1rpm 변화할 때 발생 하는 크랭크 각도 차이를 나타낸 것이다. 부하변동에 의하여 회전속도가 변하 면 일정하게 등분된 클럭 신호의 시간 간격이 변하게 되어 TDC까지 누적하게 된다. 이 결과로 150rpm에서는 1 rpm의 차이가 TDC위치를 약 1.2°CA정도 다른 위치를 나타내게 된다. 또한 선박에서 부하변동에 의한 회전수 변동은 거버너 의 민감도 정도에 따라 해상 상태가 양호할 때 1~3rpm 정도 범위 내에서 변동 하며, 해상의 상태에 따라 더 크게 변동할 수 있다. 시간기준 계측방법의 경우 는 회전수를 검출하는 순간의 회전속도와 데이터를 검출하는 순간의 회전속도
가 일치하지 않을 수 있기 때문에 이 값은 더 크게 변할 수 있다. 따라서 시간으로 일정하게 나눈 클럭 신호를 크랭크 각도로 간주하게 되면 순간속도와 부하변동을 무시하게 되는 결과로 인해 정확한 출력산정을 어렵게 하는 결과를 가져온다. 이러한 결과는 Table 3.6과 Table 3.7의 시간기준 계측 방법에 의한 출력이 불규칙하게 변하는 결과를 잘 설명하고 있다. 그러므로 시 간기준 계측방법은 주기관의 경우 순간속도 변동뿐만 아니라 부하변동에 의한 영향 때문에 정확한 출력산정을 어렵게 한다고 판단된다. 이러한 결과는 앞에 서 언급한 TDC 검출의 결과와 잘 일치하고 있다.
결언
3.5.
이상의 결과를 요약하면 다음과 같다. 1. 선박용 디젤엔진의 정확한 출력산정을 위해서는 정확한 TDC의 위치파악이 매우 중요하다 이를 위해서는 각도기준 계측방법이 매우 유효함을 알았다. . 선박용 디젤엔진의 출력산정에서 시간기준 계측방법은 정확한 출력 산정에 2. 적합하지 않다. 시간기준 계측방법에 의한 선박용 발전기 엔진의 출력산정 결과는 순간속도 3. 변동에 의한 영향 때문에 실제보다 항상 크게 나타난다. 본 연구의 실험대 상 엔진의 경우 약 10%정도 크게 산출되었다. 주기관의 경우 시간기준 계측방법은 순간속도 변동뿐만 아니라 해상상태 등 4. 에 의한 부하변동의 영향 때문에 정확한 출력산정이 어렵다. 본 연구의 실 험대상 엔진의 경우 -8.9 ~14.9%의 범위에서 불규칙한 결과를 얻었다. 각도기준 계측방법을 이용할 경우 엔코더의 사양이 중요하다 5. .제 4 장 디젤엔진의 손실각에 관한 이론적 연구
서 언
4.1
전자식 지압기(EMS : Engine Monitoring System)에서 계측 및 산출된 지시마
력이 기계식 지압기로 계측하여 플래니미터(Planimeter)에 의하여 P-V선도의 면적으로 산출된 지시마력과 차이가 난다고 보고가 되고 있고, 실제 선박 엔진 실험을 통해 오차를 확인할 수 있었다. 기존의 MIPS의 방법은 플라이휠에 근접 센서를 설치하여 회전수를 검출하고, 검출된 회전수에서 일정한 시간 간격으로 나누어 내부 클럭 신호를 발생시켜 연소압력 데이터를 샘플링하며, 이 클럭 신 호를 크랭크 각으로 간주하는 방법이다. 이러한 방법은 부하변동과 순간속도변 동을 고려하고 있지 않기 때문에 실제의 크랭크 각도와는 차이가 있게 되고, 특히 피스톤의 TDC 위치를 부정확하게 인식함으로써 결과적으로 디젤엔진의 정 확한 출력산정을 곤란하게 하는 원인으로 확인되었다.[15],[21] 엔진출력 측정에 서 상사점(TDC) CA의 오차는 디젤엔진에서는 약 10% 정도, 가솔린 엔진에 서는 약 4%[2]의 도시 평균유효압력과 25%의 열발생률의 오차를 유발하기 때문 에 TDC의 위치는 최소한 CA 각도 범위내의 정확도를 확보하여야 함을 알았 다.[3],[4],[7~14] 이를 위해서 각도기준 데이터 샘플링 방법이 중요함을 제 3 장 에 서 분명히 파악하였다. 그러나 각도기준 방법을 사용하기 위해서는 크랭크축 끝단에 설치한 로터리 엔코더의 이용이 불가피하다. 이 경우 크랭크축 끝단에 로터리 엔코더를 설치 한다고 하더라도 다 실린더의 경우는 축단에 인접한 1번 실린더의 경우를 제외 하고는 운전 중 크랭크축의 변형 등에 의하여 정확한 TDC 위치를 나타낼 수 없 게 된다. 6실린더 엔진인 대상엔진의 경우 축계 비틀림 진동의 계산 결과에 의 하면 1번 실린더와 6번 실린더와의 사이에 크랭크축의 비틀림 변형이 CA 이상으로 계산된다.[49] 실린더수가 더욱 많게 되는 경우는 이 변형은 더욱 클 것이기 때문에 정확한 출력산정에서 무시할 수 없는 정도가 된다. 결론적으로 다 실린더 엔진의 경우 1번 실린더 이외의 실린더에서는 각도기준 방법을 적용
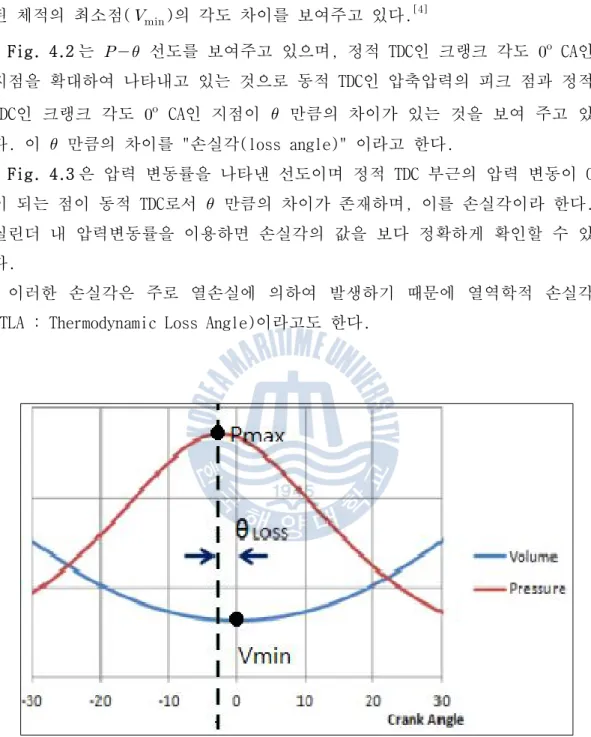
할 수가 없기 때문에 모든 실린더에 적용하기 위해서는 TDC 위치를 결정하기 위한 새로운 계측방법의 개발이 요구된다. 한편, 모터링(motoring) 시 실린더 내의 압력을 측정하여 압력의 변화율을 구하여 변화율이 0 이 되는 위치를 측정하면 해당 실린더의 동적 TDC를 측정할 수 있다. 이 방법은 실린더의 위치에 관계없이 해당 실린더의 동적 TDC를 구할 수 있는 장점이 있다. 그러나 동적 TDC와 정적 TDC 사이에는 여러 가지 이유로 차이가 존재하며, 이 차이를 손실각(loss angle)이라 정의한다. 따라서 압축 TDC를 측정하여 손실각에 해당되는 만큼의 각도 위치를 보정해 주면 임의의 실린더에서의 정확한 TDC를 결정할 수 있게 된다. 그러나 이 손실
각은 사이클 중의 열손실(heat loss)과 가스의 블로바이(blow-by) 등에 의하여
발생하며, 그 정도는 엔진의 종류와 회전수 등 운전 상태에 따라 다르게 된 다.[3],[4],[7~14] 손실각에 관한 선행 연구는 대부분 고속 4행정 엔진에 대하여 연구 및 고찰 되었고, 선박엔진에 관련된 연구도 중속 4행정 엔진이 대부분이었다. 그러나 본 연구에서는 선박용 저속 2행정 엔진을 대상으로 시뮬레이션을 시행하였다. 또한 고속엔진이나 4행정 엔진 및 선박의 NOx 환경규제를 받기 이전의 2행정 엔진들도 연료분사가 TDC 이전에 이루어지기 때문에 운전 중 압축압력의 피크 점을 확인하기란 쉽지 않다. 따라서 선행 연구들의 대부분은 연료를 차단한 모 터링 상태에서 압축압력의 피크 점을 취득하여 열역학적인 해석으로 손실각을 추정하였다. 그러나 본 연구의 대상엔진은 2000년 이후의 NOx 규제(Tire Ⅰ)를 적용받는 엔진으로 연소실 온도를 낮추기 위해 연료분사시기를 TDC 혹은 그 이후에 시작 하는 방법을 채택하였기 때문에 엔진이 실제 운항 중 실험을 통하여 손실각을 측정할 수 있다고 판단되어 먼저 시뮬레이션을 통하여 손실각에 영향을 미치는 인자에 대하여 검토하였다. 내연기관의 성능을 이론적으로 해석하는 것은 오래된 연구 테마로서 많은 연 구 성과가 보고되었다. 선박용 디젤엔진의 경우에도 성능을 예측할 수 있는 많 은 프로그램들이 개발되어 설계에 활용되고 있다. 선박용 추진 엔진은 대부분 행정 대형 저속 디젤엔진이며 유니플로 소기 방식과 과급시스템이 채택되어 2 , 있다. 따라서 여기에서는 선박 추진용 디젤엔진을 그 대상 범위로 한정하고,
프로그램의 간략화와 활용도를 높이기 위하여 단일 영역 모델[11]을 사용하기로 한다. 단일 영역 모델은 실린더내의 압력, 온도 등의 조성이 일정하다고 가정하는 모델이다. 이 모델은 실린더내 공기의 상태를 평균적인 것으로 정의하기 때문 에 연소영역과 미 연소영역을 구분하지 않는다. 이 모델은 열전달과 가스흐름 현상을 매우 간단하게 포함시킬 수 있는 장점이 있다. 본 논문에서는 먼저 연 소과정을 제외한 압축 과정만을 사용하여 손실각에 원인인자의 영향을 파악하 였으며, 그 이후 실험값과의 비교를 위해 실제 엔진의 연소과정을 다룬 사이클 시뮬레이션[12]을 이용하여 비교 고찰 하였다.