碩士學位論文
移動電話 位置 確認 시스템용 RF UNIT 의 設計 및 製作에 관한 硏究
A Study on the Design and Fabrication of RF Units for Geolocation Systems
國民大學校 大學院
電子工學科
盧 學 載
2000
移動電話 位置 確認 시스템용 RF UNIT 의 設計 및 製作에 관한 硏究
A Study on the Design and Fabrication of RF Units for Geolocation Systems
指導敎授 林 在 鳳
이 論文을 碩士學位 請求論文으로 提出함
2000 年 12 月 日
國民大學校 大學院
電子工學科
盧 學 載
2000
盧學載 의
碩士學位 請求論文을 認證함
2000 年 12 月 日
審査 委員長 曺 洪 九 印 審査委員 林 在 鳳 印 審査委員 朴 永 鎰 印
國民大學校 大學院
감사의 글
이제 석사과정이라는 조그만 결실을 맺고 대학원 생활을 마감하려 합니 다. 공학인으로 자신감과 지식을 가르쳐주신 임재봉 교수님과 여러 교수님 께 감사의 마음을 전합니다. 그리고 입학 때부터 지금까지 도움을 주신 변 종대, 김진수, 정용성, 신완후, 그 외 선배님, 대학원 동기, 후배님 여러분께 깊이 감사드립니다. 그리고 오랫동안 많은 도움을 주신 이동석 형님께 감 사드립니다.
본 논문을 위해서 여러 도움을 주신 Wireless Technology Inc., 형광전자 직원 여러분께도 진심으로 감사드립니다.
그리고 지난 30 년간 자식 뒷바리지 하시느라 고생하신 아버지,어머니, 그 리고 저를 믿고 잘 따라준 남동생 민재에게도 감사의 마음을 전합니다.
2000 년 12 월
- 목 차 - 국문요약
I. 서론 ---1
II. Geolocation System 이론 2.1 동작원리 ---3
2.1.1 패턴매칭 기술 ---3
2.1.2 동작 과정 ---5
2.1.3 시그니처 계산 ---5
2.2 Fading & Delay Spread ---7
2.2.1 Multipath Rayleigh Fading ---7
2.2.2 Multipath Delay Spread ---9
2.3 안테나 선정 방법 ---14
2.3.1 목적---14
2.3.2 전파손실 ---14
2.3.3 안테나 Diversity ---16
2.3.4 안테나 선정 및 형태 ---18
2.3.5 Erecting 안테나 ---21
2.4 IMD(Inter Modulation Distortion) ---24
2.4.1 Intermodulation 이론 ---24
2.5 잡음 ---27
2.5.1 열잡음 ---27
2.5.2 잡음지수 ---27
III. 설계 및 제작 3.1 주요구성도 ---30
3.1.1 네트워크 구성 ---30
3.1.2 Geolocation System의 형상---31
3.1.3 Geolocation System구조 ---32
3.1.4 RF Units 의 구성---33
3.1.5 전원공급장치 ---34
3.2 Link Budget---35
3.2.1 목적---35
3.2.2 AMPS(Narrow Band) System---35
3.2.3 CDMA System---36
3.3 Block Diagram---38
3.3.2 DNCU의 구성---38
3.3.3 CLOU의 구성 ---42
3.3.4 BSCU의 구성 ---44
3.4 위상 변화---46
3.5 위상차 ---50
IV. 측정 결과 및 분석 4.1 DNCU 출력 신호의 측정 ---55
4.1.1 IF 출력 신호 측정---56
4.1.2 출력 신호의 S/N 비---57
4.1.3 In-Band/Out-Band Noise 의 레벨 차이 ---58
4.1.4 Noise Figure 측정---58
4.1.5 통과 대역 평탄도 시험--- ---59
4.1.6 Spurious 와 Harmonic 신호의 제거 특성---60
4.1.7 둔감도 시험 ---60
4.2 CLOU 출력 신호의 측정 ---61
4.2.1 출력 Level 측정---62
4.2.2 Phase Noise 측정---63
4.2.3 평탄도 측정-- ---64
4.2.4 Spurious 측정---65
4.3 BSCU 출력 신호의 측정 ---66
4.3.1 출력 Level 측정---67
4.3.2 평탄도 측정 ---68
4.3.3 Spurious 측정---68 4.3.4 IMD(Intermodulation)측정---69
V. 결 론 ---70
참고문헌
영문요약
국문 요약
과거 이동전화의 대중화가 미미할 때 긴급전화(Emergency Call)의 대부 분은 유선전화(Wireline Phone)였다. 그러나 이동전화의 보급이 꾸준히 증 가함에 따라 이동전화에 의한 긴급 전화도 점차 증가하는 추세가 되었다.
작년의 미국 통계에 의하면 E-911 전화의 30% 가 이동전화에 의한 것이 었고 그 중 25% 정도는 전혀 자신의 위치를 알려주지 못했다고 한다. 그리 고 향후 1 0년 이내에 긴급전화의 75% 정도가 이동전화에 의할 것이라고 전망되고 있는 상황이다. 따라서 독특한 패턴매칭 기술을 이용하여 기존의 기지국과 단말기를 그대로 이용할 수 있고, 타 네트워크 방법(TDOA,AOA) 과는 달리 단일 기지국만으로도 위치를 확인할 수 있다는 것이다.
본 논문은 이동전화 위치 확인 시스템의 패턴매칭 알고리듬(Pattern Matching Algorithm; Fingerprinting Technology)에 사용할 RF Units
(DNCU,CLOU,BSCU) 을 설계 제작하였다. 기존의 기지국의 RF Units 은 I/Q 위상 밸런스, 신호 크기, 입력 신호 크기변화에 따른 위상차 그리고 각 Path간 위상변화가 큰 문제가 되지 않았다. 그러나 본 논문에서 제작된 RF Units 은 패턴매칭에 적용 하고자 Down-Converter(DNCU) 에 등화기 (Equalizer), 기저대역 증폭기 및 가변저항(Variable Resister)이 내장되어 I/Q 위상 밸런스 및 크기를 정확하게 조정 할 수 있다. Down- Converter 의 전체 이득 과 가변 감쇠기(Variable Attenuator) 의 적절한 매칭을 통하 여 가변 감쇠기 다이오드의 비선영적 영역을 이용 하므로 입력신호 크기 변화에 따른 위상변화(Phase Deviation) 를 최소화 할 수 있었다. 또한 Down Converter에 입력되는 Local Oscillator 신호를 Common Mode (CLOU) 로 이용 하고, Reference 신호(10MHz) 와 Reset을 이용하여 각 Local Oscillator신호의 동기를 일치 시킨다. Bore -Sight 신호(BSCU)와 EPLD Software를 이용하여 Multi-Path(6-Path)의 위상차(Phase Differ- ence)를 보정(Correction)하여 각 Path간 위상차를 최소화 하였다.
I . 서 론
Geolocation System은 이동전화 가입자의 위치를 결정하는데 있어서 Fingerprinting Technology라는 독특한 패턴 매칭 방법을 이용하고 있다.
이 기술은 이동전화 신호가 자연 또는 인공적인 물체에 의해 여러 개의 다 중 경로(Multi-Path) 로 흩어진다는 RF신호 패턴인식 이론에 근거를 두고 있다. 특정한 위치에서 전송된 RF 신호는 Geolocation System의 안테나 에 도달하는 싯점에 구별이 가능한 시그니처를 생성하는 특징을 갔는다.
즉 이동전화 가입자의 단말기에서 방사된 다중경로 시그니처를 추출하여 미리 저장된 시그니처(Calibration Table)와 비교하여 현재의 그 위치를 알 아내게 되는 것이다. 이동단말기에서 나온 신호패턴은 단말기의 위치에 따 라 유일하게 나타나기 때문에 패턴 매칭 알고리듬에 의해 사용자의 위치를 정확하게 식별해 주게 된다.
Geolocation System은 크게 안테나,TTL(Tower Top LNA),본체(DNCU, CLOU, BSCU, Base Band Units)로 구성되어 있으며, 안테나는 매칭 알고 리듬에 적합한 무지향성(Omni) 안테나를 배열(Array) 하여 사용 하고, 기 존 사업자와 같은 셀 반경(Cell Coverage)을 유지 하기 위하여 지향성 (Directional) 안테나 3개(
α , , β γ
)를 사용한다.본 논문에서는 Geolocation System에 들어가는 RF Units(DNCU,CLOU, BSCU)을 개발 하였으며, 설계 규격은 IS -97 Specification 및 패턴 매칭 알고리듬에 맞추어 제작 되었다. 또한 기본적인 수신기 설계 이론을 고려 하여 RF Units 의 Block을 설계하고, 사용할 RF 부품에 대한 단품 특성을 검증 하였다.
Down Converter(DNCU)는 전체 시스템의 S/N비, Noise Figure, Sensi- tivity를 고려하여 초단에 LNA(Low Noise Amplifier) 를 사용 하고, 높은 선택도를 유지하기 위하여 인접 채널 주파수(AMPS, iDEN, PCS …)의 전력 세기가 높아도 원하는 IF 출력 신호의 감도를 유지 하도록 IF SAW Filter 를 사용하여 높은 둔감도(Desensitization) 특성을 가지고 있다.
또한, 왜곡 없이 신호가 수신되도록 높은 IMD(Intermodulation Distortion)
특성과 낮은 Spurious Level을 유지하기 위하여 Double -Balanced Mixer 를 사용하고, CDMA Systems 의 특징인 Power Control을 위하여 AGC Block과 가변감쇄기가 설계되어 있다.
Geolocation System용 Down Converter의 가장 큰 특징은 각각의 안테나 에 들어오는 시그널의 세기에 상관없이 위상변화(Phase Deviation)를 적게 하기 위하여 Link Budget 설계시 가변감쇄기와 DNCU의 전체 이득을 적 절하게 매칭시켰다. 특히 RF Units 에서 발생하는 위상차(Phase Differ- ence)를 제거 하기 위하여 Bore -Sight 신호(BSCU) 및 EPLD Software 를 이용하여 Eigenvalue가 “1”로 수렴 할 때 까지 계속 보정(Correction)을 수행하
여 각각의 Path에서 발생하는 위상차를 일정하게 한다. Local Oscillator Unit(CLOU)은 Common Mode로 사용하고 각 Path의 케이블 길이를 일치 시켜 위상차를 최소화 하였다.
함체는 자체 방열구조(Self Heat Sink Structure)로 설계되어 온도변화에 관계없이 사용할 수 있는 내구성을 가지며, 재질은 특수 도장 된 알루미늄 재질을 사용하여 산화 및 부식 문제를 해결 하였다.
본 논문에서는 Cellular Band 용 Geolocation System의 RF Units 을 설계 및 제작 하였으며, 연동 테스트 및 필드 테스트를 미국 Oakland 와 Was- hington, D.C.지역에서 실행 하였다.
II. Geolocation System 이론
2 . 1 동작원리
2 . 2 . 1 패턴매칭 기술
이동전화에서 방출되는 전파는 수신안테나에 바로 가는 직진파가 있는 가 하면, 여러 주위 장애물에 반사되어 가는 파도 상당히 많다. 이와 같 이 직진되지 않고 다른 물체에 전파가 반사되어 가는 것을 다중경로 (Multi-Path)라 부른다. 큰 건물들이 밀집되어 있는 도심지에서는 다중경 로 현상이 특히 심하다. 그리고 다중경로로 가는 전파는 직진되는 전파 보다 감쇄가 많이 일어나며 또 시간적으로 지연되어 안테나에 도달하게 된다. 우리가 T V 를 시청할 때 스크린상에서 주화면 배경에 희미하게 잔 상이 움직이는 것을 볼 수가 있다. 이 잔상이 다중경로에 의해 나타나는 현상이다.
다중경로 현상은 주위환경 즉 건물, 구조물등 처럼 인공적인 것이 있을 수 있고 산과 같이 자연적인 장애물에 의해 나타날 수도 있는데, 이 다 중경로는 특정 위치에 따라 그 자체가 유일한(Unique) 형상을 유지하고 오랫동안 변하지 않는다는 것이다. 즉 어느 위치의 다중경로 패턴을 비 교할 수 있다면 대응되는 위치를 정확히 찾을 수 있는 것이다.
그림 2 . 1 다중경로 현상.
F i g 2 . 1 M u l t i - P a t h C o n d i t i o n .
Geolocation Systems은 바로 이러한 다중경로를 이용하게 되는데, 이동 전화에서 방출되는 전파가 여러가지 주위환경에 따라 다르게 Geoloca- tion Systems 안테나에 도달하게 되는 성질을 이용하는 것이다. 그림 2.2 에서 보는 것처럼 RF 신호는 일부만 바로 도달하고 대부분이 주위 장애물에 반사되어 안테나에 도달하게 된다.
그림 2 . 2 다중경로 및 R F 신호 시그너처 패턴 매칭.
F i g 2 . 2 S i g n a t u r e p a t t e r n m a t c h i n g o f M u l t i -P a t h a n d R F s i g n a l .
RF 신호는 Geolocation Systems 에서 캡처되어 샘플링과 디지털화되면 서 디지털신호로 바뀌어 비로소 디지털회로에서 매칭에 적합한 데이터포 맷으로 가공되게 된다. Geolocation Systems 으로부터 나온 시그니처 데 이터는 미리 갖추어진 네트워크를 통해 여러 Geolocation Systems 를 관 장하는 중앙허브서버로 보내진다. 바로 이 서버에서 시그니처 매칭 과정 이 이루어진다. 매칭은 Geolocation Systems 로부터 들어온 시그니처와 미리 저장된 시그니처와 비교되어 만약에 매칭되는 시그니처를 찾으면 바로 그 위치를 알아낼 수가 있다. Geolocation Systems 가 이용하는 시 그니처는 배열 안테나에서 수신된 RF 신호의 크기와 위상차를 말하는데 측정된 시그니처와 저장된 시그니처와 보다 효율적인 매칭처리를 위해 여러가지 알고리듬이 적용된다. 하나의 이동전화 위치를 파악하기 위해 바로 한 개의 Geolocation System이면 충분하다. 그렇지만 여러 개의
Geolocation Systems의 정보를 융합할 경우 보다 더 정확한 위치를 알 아낼 수도 있는 것이다. 그리고 추적기능은 시스템의 정확도를 한층 높 여 주는데, 획득한 시그니처로는 위치확인이 모호한 경우에는 추적필터 시스템이 그 단점을 보완해 준다. 그리고 이미 알고 있는 과거의 위치를 가지고 앞으로의 위치의 예상영역을 추정할 수 있는 것이다.
2 . 1 . 2 동작 과정
Geolocation Systems 은 전적으로 허브시스템에 의해 통제를 받는다.
허브는 Geolocation Systems에 이동단말기의 위치확인을 지시하면서 각 이동단말기에 대한 정보를 제공하는데, 예를 들어 이동전화표준을 포함 한 이동단말기의 종류, 채널 할당, ESN 번호, 우선순위등이 포함된다.
Geolocation Systems는 단말기 리스트(Mobile List)에 있는 각 이동단말 기에 대해 그에 맞는 주파수, 시간, PN 시퀀스에 해당하는 역방향 트래 픽 채널(이동국에서 기지국으로 가는 신호)을 분석하여 그 이동단말기에 대한 시그니처를 생성해낸다. 각 이동단말기에 대해 추출된 시그니처는 이미 구비된 네트워크를 통해 중앙허브 컴퓨터로 보내져서 저장된 C a l.
Table 시그니처와 매칭 절차를 밟게 된다. Cal.Table에 있는 시그니처는 그에 해당되는 위치(보통은 위도, 경도)와 짝을 이루고 있기 때문에 허브 는 매칭된 위치를 파악하게 되는 것이다. 허브컴퓨터는 Geolocation Systems 단말기리스트를 필요할 때마다 적절히 동적으로 할당 한다.
Geolocation Systems는 우선순위, 시간, 유용성등을 감안해 각 단말기에 대한 위치확인처리를 스케줄링을 한다.
2 . 1 . 3 시그니처 계산
어떤 임의의 지점에서의 위상차 정보를 그 지점의 시그니처(Sign- ature) 또는 핑거프린트(Fingerprint)라고 한다. 시그니처는 6 개의 배열 안테나로 들어오는 RF 신호를 디지털 신호로 변환시킨후 6 x 6의 행렬 형태로 표시한 양이다. 이를 특히 Covariance Matrix라 부른다.
Covariance Matrix에서 대각선원소의 값들은 각 안테나에 수신된 신호 의 세기를 나타내며, 그 외의 값은 안테나와 안테나의 위상차를 나타낸 다. Covariance Matrix는 실수부와 허수부를 갖는 복소수 Matrix면서
Hermitian matrix 이기 때문에 36개의 원소중 21 개만 유지하면 된다.
입력 신호를 샘플링하고 처리하는 과정에서 다음과 같은 세가지 형태의 데이터가 생성된다.
R a w D a t a
샘플링은 한 채널에 대해 1 PCG(1.25msec)당 Ns 개의 Sample Set이 출력된다. 이것을 Raw Data 라 부르며 Location Mode에서 허브는 데이 터 분석을 위해 옵션으로 ACOV대신에 Raw Data를 받을 수 있다.
G r o u p C o v a r i a n c e M a t r i x ( G C O V )
하나의 Sample Set으로부터 Raw Covariance Matrix(RCOV)를 계산하 고 이를 Ns개 평균하여 G C O V를 만든다. 즉 GCOV는 다음과 같이 계 산된다.
) (k
X
i 는 안테나i
에 입력된 시그널을 전체N
s샘플링에서k
th의 복소수이다.
X
j(k )
는 안테나j
에 입력된 시그널을 전체N
s샘플링에서k
th의 공액복소수(Complex Conjugate) 이다.A v e r a g e d C o v a r i a n c e M a t r i x ( A C O V )
GCOV를 일정한 개수(Ng)만큼 모은 후 평균을 구한 값으로, 위치확인 모드나 데이터베이스 구축에 사용되는 Fingerprint를 말한다.
∑
==
Nsk
j i
s j
i
X k X k
C N
1
,
1 ( ) * ( )
2 . 2 F a d i n g & D e l a y S p r e a d
2 . 2 . 1 M u l t i p a t h R a y l e i g h F a d i n g
이동국 수신기가 기지국 송신기의 가시영역 밖으로 완전이 벗어날 때가 종종 있다.(즉 직접 경로를 통하여 수신기로 입력되는 신호가 없는 경우).
이런 경우에는, 장애물에 의한 여러 반사파들이 수신되며, 각각의 반사파들 의 신호세기는 큰 차이가 없다. 서로 다른 경로를 통한 후의 수신 신호들 은 도착하는 시간 및 각각의 크기 와 위상이 다소 차이가 있다.
움직이는 이동체가 수신한 반송파 신호의 포락선은 Rayleigh 분포를 한다 는 것은 이론과 실험으로 모두 증명되었다. 따라서, 이런 페이딩을 Rayei- gh Fading이라 한다. 이론적인 모델은 여러 방향으로부터 수신된(N개의 신호 경로) 반사신호가 존재한다는 사실을 이용하여 유도한다. 수신된 신 호는 다음과 같다.
∑
=−
=
Nn
n D
n
ft f t
R t
r
1
,
) 2 2 cos(
)
( π π
( 2-1) 수신된 신호는 N개의 반사파를 합한 것이다. 각각의 반사 경로는R
n의 크 기를 가지고 있으며,f
는 반송 주파수이다. 각각의 반사파의 주파수 천이n
f
D, 은 이동체가 움직였을 때 도플러 현상(Doppler effect)에 의한 것이다.만일 신호가 이동국의 이동방향과 평행하게 전송된다면, 도플러 주파수 천 이(Doppler frequency shift)는 다음과 같다.
λ
f
D,n= v
( 2-2)여기서,
v
는 이동체의 속도이다. (2-1)에서 수신된 신호의 동위상(In - Phase) 성분과 직교(Quadrature -Phase)위상 성분에 의한 표현식은 다음 과 같다.) 2 sin(
) ( ) 2 cos(
) ( )
( t R t ft R t ft
r =
Iπ +
Qπ
( 2-3) 여기서, 동위상 성분(In-Phase Component)은∑
==
Nn
n D n
I
t R f t
R
1
2
,cos )
( π
( 2-4) 이고 직교위상 성분은 다음과 같다.∑
==
Nn
n D n
Q
t R f t
R
1
2
,sin )
( π
( 2-5) (2-4)과 ( 2-5)에서 합으로 나타낸 각 항들은 서로 독립이고 동일한 분포를 갖는 랜덤 변수이다. 따라서,
N
이 크면R
I(t )
와R
Q(t )
는 평균이 영인 가우시안 랜덤변수(Gaussian random variables)가 된다. 신호의 포락선은 다음과 같다.) ( ) ( )
( t R
2t R
2t
R =
I+
Q ( 2-6) Rayleigh 분포를 갖는다. Rayleigh 분포는 다음과 같은 확률 밀도 함수 (Probability density function)를 갖는다., )
(
22
σ
2σ RR e R
P =
− 0 ≤R
( 2-7) 그리고,R
<0일 경우에는p ( R ) = 0
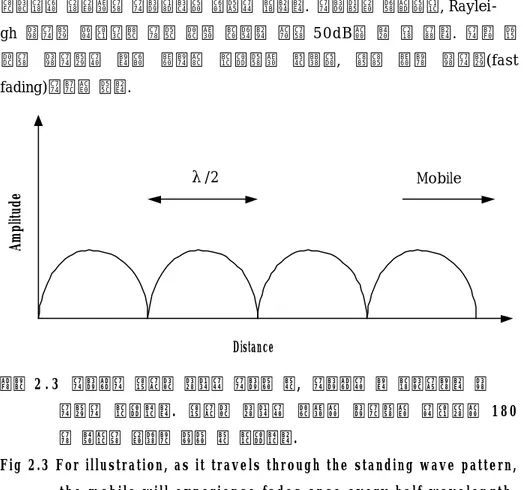
가 된다. 이런 형태의 페이딩을 보기 위한 한가지 방법은 기지국이 일정한 포락선을 갖는 무변조된 반송파를 전 송할 때 수신된 신호를 그림으로 나타내면 된다. 이동국이 수신한 포락선 의 변화에 따라 점유 대역폭은 이동국이 움직일 때 발생하는 최대 도플러 주파수 천이에 의해 결정된다.수신기로 입력되는 신호는 다양한 신호 경로를 지나서 도달하기 때문에, 결과적으로 수신 신호를 크게도 하고, 작게도 한다. 따라서 이런 페이딩 현 상을 보기 위한 또 다른 방법은 기지국에서 전송한 전자장이 서로 합쳐져 서 주의에 정재파를 형성하는 것을 그림으로 나타내는 것이다. 이동국이 이 영역을 이동함에 따라, 수신 신호의 진폭이 주기적으로 작아지는 “페이 드”가 발생한다. 수신기가 이 영역을 이동함에 따라, 수신된 크기와 위상의 변화율은 반송 주파수와 수신기의 이동속도에 영향을 받는다. 그림2.3은 각 페이드 사이의 간격이 반송 주파수의 영향을 받는 것을 나타내고 있다.
수신기가 이 영역을 이동함에 따라, 수신된 크기와 위상의 변화율은 반송
주파수와 수신기의 이동속도에 영향을 받는다. 이동통신 환경에서, Raylei- gh 페이딩 현상으로 인한 크기 변화는 거의 50dB가 될 수 있다. 이런 형 태의 페이딩은 매우 빠르게 발생하기 때문에, 종종 빠른 페이딩(fast fading)이라고 한다.
Amplitude
Distance
λ/2 Mobile
그림 2 . 3 이동국이 정재파 패턴을 이동할 때, 이동국은 매 반파장마다 페 이 딩 이 발 생 된 다. 정 재 파 패 턴 은 크 기 가 동 일 하 고 위 상 차 가 1 8 0 인 두개의 신호를 합할 때 발생된다.
Fig 2.3 For illustration, as it travels through the standing wave pattern, t h e m o b i l e w i l l e x p e r i e n c e f a d e s o n c e e v e r y h a l f w a v e l e n g t h . Note that the standing wave pattern shown is a simple example resulting from the addition of two equally strong wave that are 1 8 0 d e g r e e o u t o f p h a s e .
2 . 2 . 2 M u l t i p a t h D e l a y S p r e a d
다중경로(Multi-Path) 는 송신기에서 발생한 신호가 수신기에 직접 도달 할 뿐만 아니라, 장애물을 통과하거나 반사하여 간접적으로 도달할 때 발 생한다. 신호가 반사되는 양은 입사파의 도래각, 반송 주파수, 그리고 편파 (Polarization of incident wave)등에 의하여 달라진다. 직접 경로와 반사 경로사이에 경로차가 존재하고, 이 경로차 때문에 수신기에 도착하는 시간
이 차이가 난다. 그림2.4는 이런 개념을 설명하고 있다. 시간이 0인 순간 에 임펄스를 전송하였다면 다수의 반사 경로가 존재한다고 가정할 때, 약 1Km 정도 떨어진 수신기에서는 여러 개의 펄스 또는 지연확산(Delay spread)을 수신한다. 만일 시간차
∆ t
가 한 심볼 주기보다 크다면, 인접 심볼간 간섭(ISI:Intersymbol Interference)이 발생할 수있다. 다시 말해서, 원래의 심볼 주기보다 훨씬 빠르게 또는 늦게 도착한 심볼은 앞이나 뒤의 심볼에 악영향을 미칠 수 있다. 경로차가 고정되어있고 지연확산이 일정하 다면, 고속의 데이터 전송 시스템은 지연확산으로 인한 심볼간 간섭(ISI)의 영향을 더 받을 것이다. 고정된 데이터 전송률을 갖는 시스템에 대해, 보다 긴 경로차(따라서 더 큰 지연확산)를 갖는 전파환경은 더 심한 심볼간 간 섭을 발생시킬 것이다.1 2 3 4 Time(US)
∆t
그림 2 . 4 지연확산의 예.
F i g 2 . 4 A n e x a m p l e o f d e l a y s p r e a d .
그림2.4에서 지연확산이 270.83Kbps 의 데이터 전송률(Data rate)을 갖는 이동통신 시스템에 심볼간 간섭을 발생시키는지를 검토하면,
Kbps R
b= 270 . 83
sec 69 . 10 3
83 . 270
1 1
3
= µ
= ×
= R bps
T
b b
비트 주기(Bit period)가 그림2.4에 나타낸 지연 시간과 거의 같기 때문에,
등화기(Equalizer)를 사용하지 않으면 심볼간 간섭이 발생할 수 있다.
그림2.4에 나타낸 지연확산이 1.2288Mbps의 데이터 전송률을 사용하는 이동통신 시스템(IS -95A CDMA) 에 심볼간 간섭을 발생시키는지를 검토하 면,
Mbps R
b= 1 . 2288
sec 1 sec 81 . 10 0
2288 . 1
1 1
6
= µ ≈ µ
= ×
= R bps
T
b b
이 경우는 지연 시간이 비트 주기보다 크기 때문에, 심볼간 간섭(ISI)이 발 생할 것이다. 하지만, IS-95A CDMA 시스템에서는 신호를 복구하기위해 시간 다이버시티라(Time diversity) 고 하는 특별한 수신기를 사용하는데 서로 다른 다중경로 성분들을 모두 검출하기위해 레이크 수신기(Rake receiver)를 사용한다. 만일 기준 시간이 제공된다면, 서로 다른 다중경로 성분들은 시간적으로 분리된 별개의 반사파로써 분리할 수 있다. 이렇게 분리된 신호 성분들은 복조된 후 동상으로 결합되어 최종 혼합 수신 신호 를 만든다. 하지만, IS -95A CDMA 시스템은 간격이
1 µ sec
이내인 다중파성분들은 구별하지 못한다. 기지국간의 거리가 매우 인접해 있고 각 기지 국이 저전력으로 동작하는 뉴욕과 같은 밀집 도심 환경에서, 다중경로 성 분들은 매우 작은 전력을 가지며 서로간의 간격이
1µ sec
이하가 될 것이다.이런 경우에, IS -95A CDMA는 이 다중파 성분들을 구별해 내지 못하고 결 국 복조된 신호들을 결합하여 더 좋은 신호를 만들지 못할 것이다. 이런 이유 때문에 광대역 CDMA(B-CDMA)라고 불리는 새로운 CDMA방식이 제안되고 있다. 새로이 제안된 B-CDMA(Broadband CDMA)는 5Mbps의 전송률을 가지며, 이론적으로
0 . 2 µ sec
간격을 갖는 다중파 성분을 분리할 수 있다.또한 지연확산의 영향을 주파수 축에서 고찰할 수 있다. 시간 축에서 지연 확산(Delay spread)은 주파수축에서 주파수 선택적 페이팅(Frequency- selective fading)으로 직접 변환된다. 이를 설명하기 위해 간단한 모델을 사용하자. 그림2.5에서 보는 바와 같이, 동일한 크기
A
를 갖는 두 개의 다중경로가 있다고 가정하면, 그 중 하나의 다중경로는 다른 것과 비교하 여τ
만큼 지연되었다. 수신된 신호는) ( ) ( )
( t = As t + As t − τ
r
( 2-8) 퓨리에 변환(Fourier transform)을 취하여r (t )
의 스펙트럼을 구하면,τ πf
e
jf AS f AS f
R ( ) = ( ) + ( )
− 2이것은 다음과 같이 다시 쓸 수 있다.
) ( ) ( ] 1
)[
( )
( f AS f e
2AS f H f
R = +
−j πfτ=
Base Station )
(
t − τ As
) (t
As
Mobile그림 2 . 5 시간차가
τ
인 두 개의 다중경로 성분.F i g 2 . 5 T w o m u l t i p a t h c o m p o n e n t s s e p a r a t e d b y t i m e
τ
.여기서,
H ( f )
는 원래의 신호AS ( f )
를 변형시킨 채널의 전달함수 이다.또한
H ( f )
는 다음과 같이 쓰여질 수 있고,] [
1 )
( f e
j2πf(τ/2)e
j2πf(τ/2)e
j2πf(τ/2)H = +
−+
−)) 2 / ( 2 cos(
2 e
−j2πf(τ/2)π f τ
=
전달함수의 크기
H ( f )
는 다음과 같다.)) 2 / ( 2 cos(
2 )
( f πf τ
H =
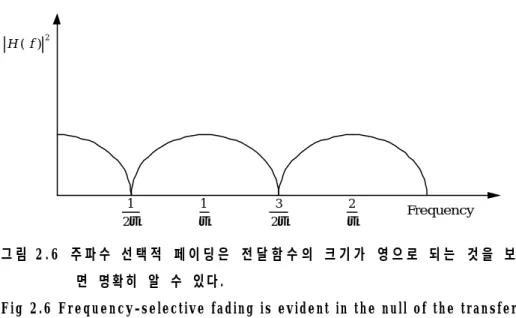
( 2-9)그림2.6에
H ( f )
를 나타내었다. 주파수 선택적 페이딩은 전달함수의 크 기가 영으로 되는 것을 보면 명확히 알 수 있는데, 이는 다중경로 지연 (Multi-Path delay) 때문에 발생된 것이다.)
2( f
Hτ
2
1
τ
1
τ
2
3
τ
2 Frequency
그 림 2 . 6 주 파 수 선 택 적 페 이 딩 은 전 달 함 수 의 크 기 가 영 으 로 되 는 것 을 보 면 명확히 알 수 있다.
Fig 2.6 Frequency-selective fading is evident in the null of the transfer f u n c t i o n .
2 . 3 안테나 선정 방법
2 . 3 . 1 목적
모든 지형적, 물리적 환경에서 위치 확인 System의 정상적인 운영 및 Location Fingerprinting 알고리듬에 맞는 안테나를 선정 한다.
2 . 3 . 2 전파손실
▷ F r e e S p a c e P r o p a g a t i o n M o d e l
자유공간 상에서, 전자파는 거리에 제곱에 반비례 또는 1/d2의 함수로 표현된다.여기서,
d
는 송수신기 사이의 거리이다.자유공간 상에서 의 경로손실을 나타내는 수식은 다음과 같다.2
4
= L
pd
π
λ
(2-10)여기서,
λ
는 신호의 파장이다.위 수식은 다음 수식과 같이 d B단 위를 갖는 수식으로 나타낼 수 있다.d f
dB
L
p( ) = 32 . 44 + 20 log
10+ 20 log
10L
p= pass lossf
= frequency in MHzd
= distance in Km예를 들면, 1800MHz 에서 5Km 떨어진 곳 까지의 전파 손실은 다음 수식으 로 나타 낼 수 있다.
5 log 1800 log 20 44 . 32 )
( dB = + +
L
p= 32.44 + 65.1 + 13.97
= 111.51dB
▷ R e a l E n v i r o n m e n t P r o p a g a t i o n M o d e l
훌륭한 전파 모델은 다양한 전파환경을 표현할 수 있도록 여러 파라미터 들의 함수가 되어야 한다. 여기서, 주파수, 주파수 범위, 송신기와 수신기 안테나의 높이, 건물의 밀집도 등과 같은 파라미터를 함수로 하는 보다 더 복잡한 경로손실을 모델로 하는 Okumura -Hata Model은 다음과 같이 나 타낼 수 있다.
▷ U r b a n A r e a
R h
h a h f
dB
L
p( ) = 69 . 55 + 21 . 16 log − 13 . 82 log
b− (
m) + ( 44 . 95 − 6 . 55 log
b) log
f
= frequency in MHzR
= distance between mobile station antenna and base station antenna.h
b= base station effective antenna heighth
m= mobile station effective antenna height) ( h
ma
= mobile station antenna height correction factor) ( h
ma
의 값은 지역에 따라 달라진다.dB f
h f
h
a (
m) = ( 1 . 1 log − 0 . 7 )
m− ( 1 . 56 log − 0 . 8 )
( S u b u r b a n )dB h
h
a (
m) = 3 . 2 (log 11 . 75
m)
2− 4 . 95
( U r b a n )▷ S u b - u r b a n A r e a
dB f
urban L
L
ps=
p( ) − 2 [log( / 28 )]
2− 5 . 4
▷ O p e n A r e a
dB f
f urban
L
L
op=
p( ) − 4 . 78 (log )
2− 18 . 33 log − 40 . 94
2 . 3 . 3 안테나 D i v e r s i t y
일반적으로 기지국에서 신호의 세기를 키우는 방법에는 LNA, 안테나 Diversity를 이용하는 2가지방법이 있다. 안테나 diversity를 이용할 때 다 음과 같은 2가지 방식이 있다.
▷ S p a c e D i v e r s i t y
서로 다른 경로를 통해 신호를 받기 위해서 2개의 독립된 안테나를 이용 한다.
▷ P o l a r i z a t i o n D i v e r s i t y
서로 다른 경로를 통해 신호를 받기 위해서 Polarization 안테나를 이용한 다.
위의 안테나 Diversity의 이론은 다음과 같다.
독립된 안테나를 이용하여 서로 다른 경로를 통해 들어오는 신호를 결합 함으로서 Gain, S/N을 증가 시킨다. 개선의 정도는 안테나 결합에 큰 영향 을 받는다.
Antenna
RX
그림 2 . 7 안테나 상이.F i g 2 . 7 A n t e n n a D i v e r s i t y .
따라서 서로 다른 신호 수신에 따라 크게 Switched Diversity, Equal Gain Combining, Maximum Ratio Combining 등이 있으며 각각의 특징은 다음 과 같다.
▷ S w i t c h e d D i v e r s i t y
다음 그림을 보면, S / N는 서로 다른걸 알수 있다. 왜냐하면 2개의 안 테나로부터 서로 분리된 경로를 통해 신호를 받고 있기 때문이다. 이중 더
좋은 S/N을 선택한다.
Switched Diversity
RX RX
Switch
A B
Signal A Signal B Result
그림 2 . 8 스위치 상이.
F i g 2 . 8 S w i t c h e d D i v e r s i t y .
▷ E q u a l G a i n C o m b i n i n g
Switched Diversity와 비슷하나, 두 안테나로부터 들어온 신호 세기를 같게 만들고, S/N는 고려하지 않는다.
▷ M a x i m u m R a t i o C o m b i n i n g
그림에서 보는 봐와 같이, 최상의 S / N을 선택할 뿐만 아니라, 신호의 크 기도 최상의 결과가 나올 수 있는 S/N값을 기본으로 한다.
Maximum Ratio Combining
+
A B
Signal A Signal B Result
그림 2 . 9 최대비율 결합기.
F i g 2 . 9 M a x i m u m R a t i o n C o m b i n i n g .
Diversity는 신호의 세기를 증가시키는데 이용한다, 그러나 각 안테나의 거리, 신호의 경로등 Diversity 방법에 의해서 영향을 받는다. Diversity를 이용 하므로서 2~6dB의 신호의 세기를 키울 수 있다.
만약 모든 조건이 같다면, Maximum Ratio Combining 이 최상의 결과를 얻 을 수 있고, Switched Diversity는 효율 면에서 떨어진다.
두 안테나 사이의 Correlation Coefficient(K) 는 Diversity Gain 과 밀접한 관계를 가지고 있으며, 작은 Correlation Coefficient(K)값은 큰 임피던스 와 Diversity Gain을 갖는다.
Diversity Gain with Maximum Ratio Combining, 50Km/h
0 1 2 3 4 5 6 7
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2
Correlation Coefficient (K)
dB
dB
그림 2 . 1 0 최대비율 결합기의 상이 이득.
F i g 2 . 1 0 D i v e r s i t y G a i n w i t h M a x i m u m R a t i o C o m b i n i n g .
2 . 3 . 4 안테나 선정 및 형태
Gain, Horizontal Beamwidth, Vertical Beamwidth, Downtilt Angle이 서 로 다른 여러 종류의 안테나가 존재 하며, 가장 일반적인 안테나는 성능에 따라 서로 다른 이득 과
33
0, 65
0, 90
0Horizontal Beamwidth를 갖는다. 작 은 Horizontal Beamwidth는 고이득을 의미 한다. 만약 고이득이 필요하면, Main Lobe를 키우고, Horizontal 또는 Vertical Beamwidth를 줄인다. 일 반적으로 지형에 따라서 안테나의 설치를 최적화 할 수 있다.▷ D e n s e U r b a n a n d U r b a n
이 경우는 높은 빌딩이 밀집 되어 있으므로 빌딩 꼭대기의 Base Station 안테나는 더 많은 Vertical Beamwidth 를 요구 하며, Indoor Coverage를 늘리기 위해서 더 큰 투과성을 갖는 고이득 안테나가 필요하다. 예를 들어 서 “hole”이 3-sector 구조 BTS에서는 Sector사이에 존재하며, Dense Urban 또는 Urban영역에서 BTS 사이의 거리는 일반적으로 0.5~1Km 정도 이므로 Horizontal Beamwidth이 65도, Gain이 17~18
dB
i , Vertical Beamwidth6 ~ 7
0였을 때 큰 문제는 되지 않는다.Antenna
Building
그림 2 . 1 1 대도시 또는 도시.
F i g 2 . 1 1 D e n s e U r b a n o r U r b a n .
“Hole” 이 다른 BTS에 의해서 덮어지는 것을 볼 수 있다.
Sector3 Sector3
Sector2 Sector2
Sector1
Sector1
BTS2
BTS1
그림 2 . 1 2 기지국 구역.
F i g 2 . 1 2 C o v e r a g e o f B T S .
▷ S u b - U r b a n
빌딩이 드문 드문 있으며,
65
0, 90
0 또는 Omni 안테나의 다양한 형태의 안테나가 일반적으로 쓰인다. Omni 안테나는 단지 분지, 계곡 지역에서 만 추천 할 만 하다.▷ R u r a l
전원 지역에서는 빌딩이 매우 적고,
90
0, 120
0 안테나가 이런 지역에서 이용된다, 그러나 종종90
0안테나가 특성이 더 좋을 때가 있다. 전원 지역 에서90
0, 120
0 안테나간의 Coverage 영역은 별로 차이가 없으나 각도가120
0보다 크면 불필요한 간섭의 원인이 된다.▷ M o u n t a i n A r e a
안테나의 모든 종류가 다양한 영역에서 사용되는데, 각도가
33
0인 고 이득 안테나는 Straight Mountain Valley 또는 River Valley에서 이용된다.굴곡진 부분 과 구굴구굴한 지역에서 Omni 안테나는 지형적 영향을 받아
33
0의 고 이득 안테나 만큼 Coverage를 가질수 있다. 예를 들어 만약 길 가 맞은 편에 산이 있다면33
0의 고이득 안테나 보다 각도가 큰 저이득안테나가 적합하다. 또 만약 길을 따라 직선으로 기지국이 설치 되어 있으 면 Omni 안테나가 최상의 선택이며, 교통량은 큰 문제가 되지 않는다.
BTS
Mountain Valley or River Valley
Road
BTS Mountain
Mountain
Mountain
Mountain Omni
Omni
Road
그림 2 . 1 3 산악 지역.
F i g 2 . 1 3 M o u n t a i n A r e a .
2 . 3 . 5 E r e c t i n g 안테나
수직 안테나는 설치 방법에 따라서 크게 Top Mount, Wall Mount, Mini- Tower, Tower 등이 있으며 각각의 특징은 다음과 같다.
▷ T o p M o u n t
빌딩의 지붕 위에 안테나를 설치 할 때 빌딩의 높이가 충분 하다면 Li- near Type 안테나는 충분한 공간이 확보되거나 Diversity효과가 충분이 제거 될 수 있는 곳을 이용한다. Dual-Polarization 안테나는 공간상 제약
이 따르므로 충분히 고려를 해야 한다.
Antenna
Roof Top
그림 2 . 1 4 정상 설치.
F i g 2 . 1 4 T o p M o u n t .
▷ W a l l M o u n t
벽 안쪽이나 바깥쪽에 설치 하는 것으로, 만약 빌딩이 너무 크면 낮은 고도에서 안쪽 벽에 안테나를 설치한다.
Antenna
그림 2 . 1 5 벽 설치.
F i g 2 . 1 5 W a l l M o u n t .
▷ M i n i - T o w e r
만약 빌딩이 충분이 높지 않으면 바라는 높이 까지 Mini -Tower를 설치 한다. Tower의 크기를 줄일 수 있으므로 Dual-Polarization 안테나는 주
의 환경에 따른 최상의 선택이라고 할 수 있다. Tower의 모양이 원형이면 안테나의 각도를 쉽게 조정 할 수 있다.
Antenna
그림 2 . 1 6 소형 탑 설치.
F i g 2 . 1 6 M i n i - T o w e r M o u n t .
▷ T o w e r
고층 타워는 충분히 큰 빌딩이 없는 교외 지역에서 넓은 지역을 Cover 하려고 종종 이용한다. 또 Tower의 모양도 원형이어야 한다.
Antenna
Ground
그림 2 . 1 7 탑 설치.
F i g 2 . 1 7 T o w e r M o u n t .
2 . 4 I M D ( I n t e r M o d u l a t i o n D i s t o r t i o n )
2 . 4 . 1 I n t e r m o d u l a t i o n 이론
상호변조(IM;Intermodulation)는 입력 신호에 존재하지 않는 주파수들을 출력 신호에 포함하여 발생시키는 비선형 처리과정 이다. 그림2.18은 상호 변조 현상을 설명한다. 증폭기와 같은 비선형 소자들은 다음식과 같은 특 성을 갖는다.
...
...
0 1 2 33 3 2 2 1
0
+ + + + = + + + +
= a a x a x a x y y y y
y
( 2-11)여기서,
x
는 증폭기의 입력이고y
는 증폭기의 출력이다. 만일 증폭기가 선형적이라면, 전달 함수는 첫번째 두 항만 포함 한다. 즉,1 0 1
0
a x y y
a
y = + = +
( 2-12)위의 수식(2-12) 에서 볼 수 있듯이
x
에 존재하는 주파수들은y
에 존재 할 것이고, 새로이 발생되는 주파수들은 없다. 반면, 증폭기가 비선형적 (Nonlinear)이고 고조파 항(Higher Order Terms)을 포함한다면 출력y
는 원래x
에 포함되어있지 않던 주파수들을 포함할 것이다.입력 출력
...
3 3 2 2 1
0
+ + + +
= a a x a x a x x y
그림 2 . 1 8 비선형 소자.
F i g 2 . 1 8 A n o n l i n e a r d e v i c e .
만일, 입력
x
가 두 주파수f
1, f
2를 갖는 정현파라면,) 2 cos(
) 2
cos( f
1t B f
2t A
x = π + π
그러면, 세 번째 항 (즉,
y
2)으로 인한 출력은 다음과 같다.( ) ( )
[
1 2]
33 3 3
3
a x a A cos 2 f t B cos 2 f t
y = = π + π
= a
3[ A3cos
3( 2 π f
1t ) + 3 BA
2cos
2( 2 π f
1t ) ( cos 2 π f
2t ) ]
+ 3 AB
2cos( 2 π f
1t ) cos
2( 2 π f
2t ) + B
3cos
3( 2 π f
2t )]
a A ( f t ) a A ( ( ) f t ) a BA ( f
2t )
2 3 1
3 3 1 3
3
cos 2
2 3 3
2 4 cos 2
4 cos
3 π + π + π
=
a BA ( ( f f ) t ) a BA ( ( f
1f
2) t )
2 3 2
1 2
3
cos 2 2
4 2 3
2 4 cos
3 − + +
+ π π
a B A ( f t ) a B A ( ( f
2f
1) t )
2 3 1
2
3
cos 2 2
2 2 3
2 cos
3 + −
+ π π
( )
( ) ( ) cos( 2 ( 3 ) )
2 4 4 cos 2 3
2 4 cos 3
2 3
3 2 3
3 1
2 2
3
a B f t
t B f
t a f A f
B
a π + + π + π
+
( 2-13)
(2-13) 을 살펴보면 입력에 존재하지 않는 6개의 새로운 주파수를 볼 수 있다. 이 새로운 6개 항의 주파수들과 크기를 다음과 같이 나타낼 수 있다.
3 f
14
3 3
A a
3 f
24
3 3
B a
( 2 f
1− f
2)
4 3 a
3BA
2
( 2 f
1+ f
2)
4
3 a
3BA
2
( 2 f
2− f
1)
4 3 a
3B
2A
( 2 f
2+ f
1)
4 3 a
3B
2A
일반적으로 주파수 성분
( 3 f
1)
,( 3 f
2)
,( 2 f
1+ f
2)
,( 2 f
2+ f
1)
은 대역밖에존재하므로 대역 통과 필터에 의해 쉽게 차단이 가능하기 때문에 문제를 일으키지 않는다. 반면, 주파수 성분
( 2 f
1− f
2)
,( 2 f
2− f
1)
은 동작 주파수 대역내에 존재함으로 심각한 문제를 일으킬 수 있다.그림2.19는
f
1= 882 . 42 MHz
,f
2= 880 . 62 MHz
의 3차 상호변조 성분이 셀룰러 대역내에 있음을 나타낸다.Input Output
3 3
3 a x
y = x
878.82 MHz
880.62 MHz
882.42 MHz
884.22 MHz
f1 f2
) 2
(
f2 − f1( 2
f1− f2) Cellular Band
그림 2 . 1 9 셀룰러 대역내에 존재하는 3 차 상호변조항.
a2= 1 , A = 1 , a n d B = 1 .
F i g 2 . 1 9 S e c o n d - o r d e r I M c o m p o n e n t s . N o t e t h a t a2= 1 , A = 1 , a n d B = 1 .
2 . 5 잡음
2 . 5 . 1 열잡음
모든 도전체는 전자의 운동에 의해 열잡음이 발생하여, 이것은 아래의 수식으로 표현된다.
Hz KTW
N = /
( 2-14) 여기서,K
: 볼츠만 상수, -228.6dBW/KHzT
: 절대 온도W
: 대역폭/Hz위의 수식에서 보듯이 온도가 올라갈수록, 대역폭이 증가할수록 열잡음은 증가하게 된다.
(2-14) 로부터 상온에서
N = − 174 dBm / Hz
이고, 이것을 1.23MHz 대역 폭에 대해 환산하면 다음과 같이 표현된다.
MHz Hz
dBm
N = − 174 / × 1 . 23
= − 174 + 10 log( 1 . 23 × 10
6) MHz dBm / 1 . 23
− 113
=
즉, CDMA 방식에서는 1FA 대역폭 내 최소한 –113dBm의 열잡음이 존재 하게 된다.
2 . 5 . 1 잡음 지수
증폭기와 같은 모든 능동 소자는 증폭 과정에서 새로운 잡음을 발생시키 게 된다. 이와 같이 능동 소자에서 증가하는 잡음의 양은 입력단(신호/잡 음) 비율과 출력단(신호/잡음)비율의 차이로 나타내는데, 이것을 잡음 지수 (Noise Figure)라고 한다.
( )
( )
=
out in
dB
S N
N
NF 10 log S
또한 그림2.20과 같이 다단으로 연결된 증폭기의 잡음 지수는 다음 수식으 로 표현된다.
G4 F4 G3
F3 G2
F2 G1
F1
그림 2 . 2 0 증폭기 다단 접속.
F i g 2 . 2 0 A c a s c a d e a m p l i f i e r .
또한 그림2.20과 같이 다단으로 연결된 증폭기의 잡음 지수는 다음 수식으 로 표현된다.
...
1 1
1
3 2 1
4
2 1 3
1 2
1
G G G
F G G F G F F
F
total= + − + − + −
( 2-15)(2-15) 에서 보듯이, 전체 잡음 지수는 초단 증폭기의 잡음 지수와 이득에 의해 대부분 결정된다. 따라서, 낮은 잡음 지수의 수신기를 구성하기 위해 서는 초단 증폭기로 낮은 잡음 지수와 높은 이득을 갖는 LNA(Low Noise Amp)를 장착해야 한다.
대부분의 CDMA BTS는 수신 잡음 지수가 약 4dB 이하의 작은 값을 갖도 록 수신 초단에 1~1.5dB의 매우 낮은 잡음 지수와 30~40dB의 높은 이득 의 LNA 로 구성된다. 또한, CDMA 이동국의 수신 잡음 지수는 약 10dB 정도로서, 수신 초단의 LNA 의 불량이 전체 수신 잡음 지수를 증가시켜 수 신 감도 저하와 통화 용량 저하의 큰 원인으로 나타난다.
CDMA는 noise limited system이다. 즉, CDMA 성능 및 통화 용량는 전적 으로 잡음의 분포 및 특성에 의해 결정되는 것이다. 따라서, 높은 잡음 지 수는 실질적인 잡음 레벨을 증가시켜 전체 시스템 통화 용량 및 기지국 반 경을 감소시키게 된다. 앞에서 설명한 잡음 지수에 따라, 일반적은 BTS 수신 감도는 규격상으로는 –117dBm/1.23MHz(Cellular), -119dBm/1.23 MHz(PCS)이지만 대부분의 시스템이 이보다 3~5dB 더 좋은 특성을 나타 낸다. 이동국의 경우는 –105dBm/1.23MHz 정도이다.
안테나 케이블 손실 FA별 수신전력 분배기
F1 Down Converter
F4 Down Converter L1
-3dB/3dB
LNA +20dB/2dB
L2 -7dB/7dB
XCVR +60dB/10dB
그림 2 . 2 1 기지국 수신 초단에서의 이득/ 잡음 지수.
F i g 2 . 2 1 A g a i n / n o i s e i n d e x o f f r o n t-e n d -r e c e i v e r i n B T S .
(2-15) 는 dB 단위로 표현되어 있으므로, 모든 dB 단위를 linear하게 변화 시켜 계산해야 한다. 또한 이득은 없고 손실만이 발생하는 케이블은 손실 값이 바로 잡음 지수와 마이너스 이득으로 표현된다.
L1 à NF
dB: 3dB, G
dB: -3dB à F : 2, G
lin: 0.5 LNA à NF
dB: 2dB, G
dB: 20dB
à F : 1.6, G
lin: 100 L2 à NF
dB: 7dB, G
dB: -7dB
à F : 5, G
lin: 0.2 XCVR à NF
dB: 10dB, G
dB: 60dB
à F : 10, G
lin: 10
6(2-15)에 따라
total_F=4.14
total_NF
dB=10log(4.14)=6.17dB total_gain=68dB
즉, 그림2.21에 나타낸 기지국의 전체 수신 잡음 지수는 6.17dB이며, 전체 수신 이득은 68dB이다. 위의 예제에서 보듯이 LNA 전단의 안테나 케이블 손실에 의한 전체 잡음 지수가 크게 증가한다는 것을 알 수 있다.
I I I . 설계 및 제작
3 . 1 주요 구성도
Geolocation System은 크게 안테나, TTL, 본체로 구성되어 있다. 안테 나는 Geolocation System 알고리듬에 적합한 안테나간의 위상차를 이용하 기 위해 주로 Omin 배열안테나를 사용하게 된다. 본체는 1 9인치 3U 크기 의 Shelf 와 각 보드를 냉각 시켜주는 팬으로 나누어진다. 함체에는 모두 13개의 보드가 장착되는데 먼저 전원을 공급해 주는 직류전원공급장치가 이중화를 위해 두 개가 양측에 자리하고 있다. 다음은 R F부와 디지털부로 나눌수 있는데 RF 부에는 CLOU, DNCU, B S C U가 있다. 디지털부에는 MCPB, LSPB, MSCB, RTFB 등의 보드가 있다. 그리고 마지막으로 함체의 후미부에 RF 와 디지털 백보드가 각각 부착되어 있다. Geolocation System의 형상은 다음 절에서 논한다.
Geolocation System하드웨어 구조는 표준크기이며 어떠한 다른 프로토콜 에도 적용가능한 포괄적인 형상을 가지고 있다. 디지털보드의 대부분은 중앙처리장치를 가지고 있는데 모토롤라 계열의 MPC860 프로세서를 장착 하고 있다.
3 . 1 . 1 네트워크 구성
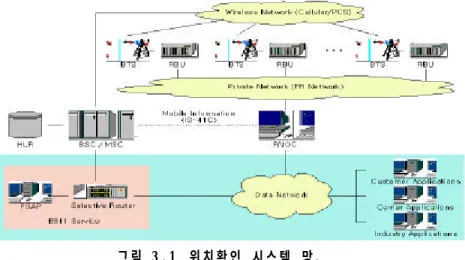
그림3.1은 Geolocation Systems 이 배치되었을 때의 네트워크 구성도를 나타낸 것이다.
그림 3 . 1 위치확인 시스템 망.
F i g 3 . 1 G e o l o c a t i o n S y s t e m s N e t w o r k .
Geolocation Systems는 기지국의 모든 정보를 RNOC내에 있는 중앙허브 컴퓨터로부터 받는다. Geolocation Systems 는 원칙적으로 CDMA 셀룰러 네트워크와 무관하게 설치/운용될 수 있다. Geolocation Systems를 Stand -Alone으로 운용할 경우 기지국과 다른 장소에 설치될 수 있다. 그 러나 Embedded System으로 운용할 경우 기지국 안테나를 Directional Coupler를 이용하여 R F신호를 공유할 수 있다. 그림에서 보는 바와 같이 위치확인 시스템 운용은 RNOC의 중앙허브 컴퓨터로 시작되며, Geolocat- ion Systems 에서 획득한 시그니처를 허브컴퓨터에서 위치확인하여 데이터 망(인터넷망)을 이용하여 E-911 서비스는 물론 다른 부가서비스 서버로도 보내게 된다.
3 . 1 . 2 G e o l o c a t i o n S y s t e m s 시스템의 형상
Geolocation Systems 는 설계와 제작상에 상용화 개념을 적용시킨 첨단 구조로 되어 있다. Geolocation Systems 는 본체는 그림3.2에서 보는 바와 같이 Shelf와 팬으로 구성되어 있는데, Shelf는 19인치, 3U 크기의 표준사 이즈로 되어 있다. 각 보드는 보수와 유지가 간편하고 쉽게 교체될 수 있 게 모듈 형태로 되어 있으며 각 보드는 정해진 규격하에 각종 전자부품이 집적되어 있다.
그림 3 . 2 위치 추적장치의 형상.
F i g 3 . 2 C o n f i g u r a t i o n o f G e o l o c a t i o n S y s t e m .
3 . 1 . 3 G e o l o c a t i o n S y s t e m 구조
Geolocation System의 쉘프는 시그니처 패턴을 생성하는 역할을 하는 기능을 하며, 크게 전원공급장치, RF 부, 디지털부로 나뉜다.
그림3.3은 Geolocation System의 각 보드의 모습을 보여주고 있다.
그림 3 . 3 위치 추적장치의 쉘프 형상.
F i g 3 . 3 S h e l f C o n f i g u r a t i o n o f G e o l o c a t i o n S y s t e m .
전원공급장치는 외부에 마련되어 있는 AC-DC 전원공급장치로부터 24V 직류전원을 입력받아 각 보드에 적절한 전원(+15V, -15V,+5V)을 공급하 는 역할을 한다. 양측에 전원공급장치가 2개 장착되며, 우측에는 RF 부, 좌측에는 디지털부가 된다. R F부에는 C L O U 1개, DNCU 3, BSCU 1,
MSCB 1개가 있으며, CLOU 옆에 있는 MSCB는 디지털 보드이지만 그 역 할이 RF부와 매우 긴밀하기 때문에 RF부에 위치해 있다. 한편 디지털보드 로는 MCPB, LSPB, MSCB, RTFB보드등이 있다.
그림3.4는 Geolocation System내부의 인터페이스를 개략적으로 보여주고 있다.
그림 3 . 4 위치 추적장치의 블록도.
F i g 3 . 4 B l o c k D i a g r a m o f G e o l o c a t i o n S y s t e m .
3 . 1 . 4 R F U n i t s 의 구성
RF Units 은 DNCU(3EA), CLOU(1EA), BSCU(1EA)으로 구성 되어 있고, DNCU(Down Converter Unit) 는 6개의 안테나로 들어온 RF 신호를 각각 Base Band(I/Q) 신호로 Down-Conversion해서 디지털부에서 A/D 및 Despreading 할 수 있게 한다. CLOU(Common Local Oscillator Unit) 는 LO1,2,3 시그널을 각각의 DNCU Local 입력쪽으로 공급한다.
BSCU(Bore Sight Converter Unit)는 MSCB(Mobil Station Control Boa- rd)위에 Daughter-Board형태로 장착이 되며 MSCB에서 출력된 4.95MHz 신호를 RF 시그널로 Up -Conversion해서 TTL(Tower Top LNA) 쪽에 입 력해서 Geolocation System전체를 보정(Correction) 한다.
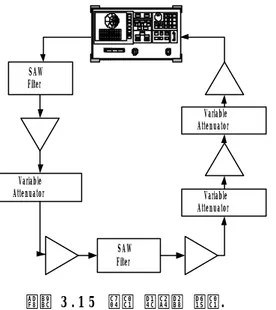
그림3.5는 Geolocation System의 RF Units(DNCU,CLOU)의 내부 모습을 보여주고 있다.
그림 3 . 5 위치 추적장치의 R F U n i t s .
F i g 3 . 5 R F U n i t s o f G e o l o c a t i o n S y s t e m .
3 . 1 . 5 전원공급장치
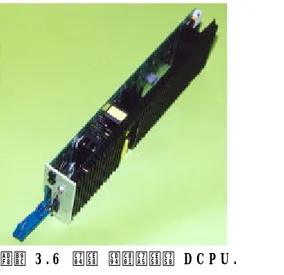
전원공급장치는 외부로부터 +24V 직류전원을 공급받아 +15V, -15V, +5V 직류전원을 출력시켜 각 보드에 적절한 전원을 공급하는 역할을 한 다. 그리고 이중화를 위해 두개가 장착되어 있다. 그림3.6은 Geolocation System의 DCPU(DC-to-DC Power Supply Unit)이다.
그림 3 . 6 위치 추적장치의 D C P U .
F i g 3 . 6 D C P U o f G e o l o c a t i o n S y s t e m .
3 . 2 L i n k B u d g e t
3 . 2 . 1 목적
Geolocation Systems Link Budge을 만들어서 전체 System 및 각 Mo- dule의 Specification을 정의 할 수 있으며, Geolocation System설계 및 Site선정시 유용하게 이용한다.
3 . 2 . 2 A M P S ( N a r r o w B a n d ) S y s t e m
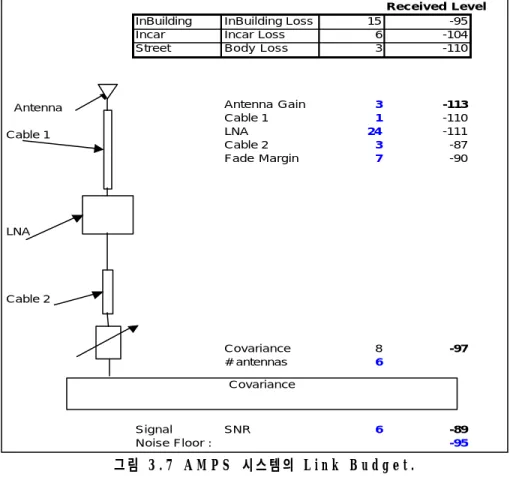
그림 3 . 7 A M P S 시스템의 L i n k B u d g e t . F i g 3 . 7 L i n k B u d g e t o f A M P S S y s t e m .
<정의>
Covariance Loss = 10log#antennas(6) = 8
Received Level
InBuilding InBuilding Loss 15 -95
Incar Incar Loss 6 -104
Street Body Loss 3 -110
Antenna Gain 3 -113
Cable 1 1 -110
LNA 24 -111
Cable 2 3 -87
Fade Margin 7 -90
Covariance 8 -97
# antennas 6
Signal SNR 6 -89
Noise Floor : -95
Cable 2 LNA Cable 1
Covariance Antenna
3 . 2 . 3 C D M A S Y S T E M
그림 3 . 8 C D M A 시스템의 L i n k B u d g e t . F i g 3 . 8 L i n k B u d g e t o f C D M A S y s t e m .
< 정의 >
1) Thermal Noise : KTB = kTW
K : Boltzmann’s Constant (1.38×10-23W/Hz/K or 228.6㏈W/Hz/K) T : The noise temperature of the reciver (290。K Kelvin)
W : The bandwidth of the system
Received Level
Omni Directional Antenna(6 Arrey) Directional Antenna(3Path:α, β, γ)
Loss Loss
InBuilding 15 -130 InBuilding 15 -108
Incar 6 -139 Incar 6 -117
Street 3 -145 Street 3 -123
Required Antenna -126
Antenna Gain 12
Cable 3 1
LNA 35
Cable 4 3
Antenna Gain 3 -148 Fading 7
Cable 1 1 -145
LNA 35 -146 Loading 50%
Cable 2 3 -111
Fade Margin 5 -114
Required Signal -122
Noise 1 5 # sect 3
Noise 2 10 Cell Noise 5
kTB -113
Sensitivity_2 -103 Sensitivity_1 -108
Signal -97 6 CNR -14
-2
Data Rate 9.6
Gain 40
Eb/No 7
Signal bef. Desp
Despreader Gain 32 -119
Threshold bef Cov -87 Covariance Gain 8
# antennas 6
SNR 6 -73
Noise Floor : -79 Cable 2 LNA Cable 1
Covariance Antenna
Cable 3
Antenna
Despreader (EPLS)
Decoder (CSM 2000) Noise: Loading
Cable 4 LNA
상온에서 N = 174dBm/Hz 이고, 이것을 1.23MHz 대역폭에 대해 환산하 면 다음과 같이 표현된다.
N = -174dBm/Hz ×1.23MHz = -174+10log(1230000) = -113dBm/1.23MHz
즉, CDMA 방식에서는 1FA 대역폭 내 최소한 -113dBm의 열잡음이 존재 하게 된다.
2) Sensitivity_1 = Thermal Noise + Cell Noise = -113 + 5 = -108dB 3) CNR = Gain+Eb/No-10log(1230000) = 40+7 -10log(1230000) =
-14dB
4) Gain =10logData Rate = 10log(9600) = 40dB
5) Required Signal = Sensitivity _1+ CNR = -108-14 = -122dB
6) Sensitivity_2 = Thermal Noise + Cell Noise +10log#sect = -113 + 5 + 5 = -103dB
7) Signal = Sensitivity_2 + SNR = -103 + 6 = -97dB
8) Despreader Gain(Processing Gain) = Chip Rate Before Despreading / Chip Rate After Despreading
= 1536 / 1 = 32dB
RadioCamera System은 1.25ms마다 1536Chip을 Correlation &
Accumulation하도록 설계되어 있으므로.
9) Noise Floor = Narrow Band System Noise Floor (AMPS System) + 10log CDMA BW/Narrow Band BW
= -95 + 10log1.23/0.03 = -79dBm 10) Covariance Gain = 10log#antenna = 10log6 = 8dB
11) Threshold bef Cov (Covariance Matrix만들기 전의 Threshold level)
= Noise Floor - Covariance Gain = -79 -8 = -87dB