工 學 碩 士 學 位 論 文
시간지연을 갖는 일차시스템의 퍼지알고리즘에 관한 연구
A S tu dy on th e F u z z y A lg orithm for 1s t P lant w ith a T im e D e lay
國 民 大 學 校 大 學 院
機 械 工 學 科
趙 容 晟
2 0 0 0
시간지연을 갖는 일차시스템의 퍼지알고리즘에 관한 연구
A S tu dy on th e F u z z y A lg orithm for 1s t P lant w ith a T im e D e lay
指 導 敎 授 韓 道 榮
이 論文을 工學碩士學位 請求論文으로 提出함 .
2000年 12月 日
國 民 大 學 校 大 學 院
機 械 工 學 科
趙 容 晟
2 0 0 0
趙 容 晟 의
工 學 碩 士 學 位 請 求 論 文 을 認 准 함 .
2000年 12月 日
審 査 委 員 長
審 査 委 員
審 査 委 員
國 民 大 學 校 大 學 院 .
目 次
論文要旨 ⅲ
Lis t o f Fig u re s ⅳ
Lis t o f Ta b le s ⅴ
No m e n c la t ure ⅵ
Ⅰ. 서 론 1
Ⅱ. 제어 시스템 3
Ⅲ. 제어 알고리즘 5
3 . 1 퍼지 제어기의 형태 5
3 . 1. 1 퍼지화 5
3 . 1.2 퍼지 추론 7
3 . 1.3 비 퍼지화 8
3 .2 제어 알고리즘의 구성 10
3 .2 . 1 무 차원 변수 ARD 10
3 .2 . 1. 1 기존 퍼지 제어기 10
3 .2 . 1.2 ARD의 구성 10
퍼지 입력 변수 ARD
3 .2 .2 초기 비율 IR 13
3 .2 .2 . 1 시스템의 반응성 13
3 .2 .2 .2 반응비 IR 14
3 .2 .3 퍼지 제어기 15
3 .3 비례 미분 적분 제어 17
3 .3 . 1 비례 제어 17
3 .3 .2 적분 제어 2 1
3 .3 .3 미분 제어 24
Ⅳ. 시뮬레이션 28
4 . 1 시뮬레이션 구성 28
4 .2 시뮬레이션 결과 3 5
Ⅴ. 결 론 4 0
참고문헌 4 1
ABRACT 4 2
論 文 要 旨
제어이론의 발전과 고급제어 기술의 개발에도 불구하고 아직까지 산업현장에서 많이 사용되고 있는 제어 기법은 Zie g le r- Nic ho ls 튜닝을 사용한 P ID 제어기이다.
P ID 제어기는 구조가 간단하고 다양한 플랜트에 적용이 가능하며 현장 엔지니어 들이 이해하기 쉬운 반면에 1/ 4 의 감쇠비에 의한 오버슈트를 보이고 있어 공조시 스템에 적용하기에는 과도응답이 적절치 않으므로 튜닝방법의 개발이 요구되어 진다.
또한 As tro m과 Witte nma rk가 처음 제시한 자기동조 제어기는 시스템의 파라미 터를 모르거나 시스템 내부에 잡음이 존재하는 환경에서 제어기의 파라미터를 실 시간으로 조정하여 시스템의 동특성 변화에 적응하도록 되어 있다. 그러나 제어 루프 내에서 적절히 선택한 평가 함수가 최적이 되는 제어법칙을 결정해야 하고 구조가 복잡하여 제어에 대한 이해와 적용이 어렵다.
이에 따라 본 연구에서는 이같은 단점을 줄이고 이해하기 쉬우며 만족스러운 제어성능을 얻기 위하여 허용 한계내의 상승 시간과 진동폭 그리고 정상상태 오 차를 감소시킬 수 있는 퍼지 제어기를 개발하고 공조기기 시스템을 1차로 가정한 모델에 적용한 결과를 Zie g le r- Nic ho ls 튜닝의 결과와 비교 하였다.
Lis t o f F ig u re s
Fig . 1 Co nt ro l s ys te m b lo c k d ia g ra m 3
Fig . 2 S c he ma tic o f AR 1 1
Fig . 3 Blo c k d ia g ra m o f Fuzzy a lg o rit h m 15 Fig . 4 Flow d ia g ra m o f fuzz y a uto - t u ning P ID a lg o rit h m 16 Fig . 5 Me m b e rs hip fu nc tio n o f in p ut ei 19 Fig . 6 Me m b e rs hip fu nc tio n o f in p ut A R Di 19 Fig . 7 Me m b e rs hip fu nc tio n o f o ut p ut
U
P i 2 0 Fig . 8 Me m b e rs hip fu nc tio n o f in p ut ei 2 2 Fig . 9 Me m b e rs hip fu nc tio n o f in p ut A R Di 2 2 Fig . 10 Me m b e rs hip fun c tio n o f o ut p utU
I i 2 3 Fig . 1 1 Me m b e rs hip fun c tio n o f in p ut ei 2 5 Fig . 12 Me m b e rs hip fun c tio n o f in p ut A R Di 2 5 Fig . 13 Me m b e rs hip fun c tio n o f o ut p utU
D i 2 6 Fig . 14 Blo c kd ia g ra m o f s ys te m 2 9 Fig . 15 Blo c kd ia g ra m o f s ig na l 3 0 Fig . 16 Blo c kd ia g ra m o f Ra te 3 1 Fig . 17 Blo c kd ia g ra m o f I Co m p o s e 3 2 Fig . 18 Blo c kd ia g ra m o f tim e d e la y 3 2 Fig . 19 Blo c kd ia g ra m o f a r 3 3 Fig . 2 0 Blo c kd ia g ra m o f a rd 3 3 Fig . 2 1 Blo c kd ia g ra m o f Initia l in p ut 34 Fig . 2 2 Blo c kd ia g ra m o f c o nt ro l s ig na l 34 Fig . 2 3 Control res ult for plant 1 3 6Fig . 24 Control res ult for plant 2 3 7 Fig . 2 5 Control res ult for plant 3 38
Lis t o f Ta b le s
Ta b le 1 Ru le s fo r UP i 2 0
Ta b le 2 Ru le s fo r UI i 2 3
Ta b le 3 Ru le s fo r UD i 2 6
Ta b le 4 P la nt ty p e s 3 5
Ta b le 5 S im ula tio n re s u lts 3 9
NO MENC LAT U RE
S y m b o l B rie f d e f in it io n Ty p ic a l u n its
y r
U CM
pt
st
rRe fe re nc e In p ut
Fuzz y c o nt ro lle r o ut p ut S ys te m Co nt ro l s ig na l Ove rs ho o t
S e tt ling tim e Ris ing tim e
- - -
% s e c s e c
S ub s c rip ts
P I D i
P ro p o tio na l c o nt ro l Inte g ra te c o nt ro l De riva tive c o nt ro l S e q ue nc e
Ⅰ . 서 론
제어이론의 급속한 발전과 컴퓨터를 이용한 꾸준한 적용에도 불구하고 아직까 지 산업현장에서 많이 사용되고 있는 제어 기법은 194 2 년 Zie g le r와Nic ho ls 에 의 해서 제안된 1/ 4 감쇠비의 튜닝법을 이용한 P ID 제어기이다. 또 다른 P ID제어기는 ITAE(Inte rg ra l o f time a nd a b s o lute e rro r) 를 이용한 튜닝법으로 설정입력변화에 적절히 감쇠된 반응을 나타나게 한다. 이러한 P ID 제어기는 구조가 간단하고 다양 한 플랜트에 적용이 가능하며 현장 엔지니어들이 이해하기 쉬운 반면에 제어의 자동화가 어려우며 진동의 진폭을 허용 한계내로 유지하기 어려운 단점이 있다.
제어의 자동화를 위하여 As tro m과 Witte nma rk가 처음 제시한 자기동조 제어기는 시스템의 파라미터를 모르거나 시스템 내부에 잡음이 존재하는 환경에서 제어기 의 파라미터를 실시간으로 조정하여 시스템의 동 특성 변화에 적응하도록 되어 있다. 그러나 제어 루프 내에서 적절히 선택한 평가 함수가 최적이 되는 제어법칙 을 결정해야 하고 구조가 복잡하여 제어에 대한 이해와 적용이 어렵다. 그러므로 비교적 이해가 쉬우며 또한 제어의 자동화가 가능하게 하기 위하여 퍼지제어기 (FLC : Fuzz y lo g ic c o nt ro lle r) 를 개발하였다. 퍼지제어기는 사람들의 일반적인 상식이나 경험을 이용하여 조합된 퍼지 제어 룰을 기반으로 작동된다. 그러나 적 절한 퍼지룰 특히, 복잡한 동적과정이 관여된 경우 적절한 퍼지룰의 작성이 어렵 다. 초기 룰들은 세밀하지 못하고 부정확하므로 1994 년 Hua ng 그리고 Ne ls o n은 룰들을 발전시키고 또한 수정을 위한 전략이 필요하다고 제안하였다. 퍼지 제어기 설계자들은 성능의 발전을 위하여 시행착오법을 사용하여 퍼지룰들을 수정해야만 했다. 이러한 어려움을 해결하기 위하여 자기조절 퍼지제어기(STFLC : S e lf- t u ning fuzz y lo g ic c o nt ro lle r) 를 개발하였으며 적응 퍼지제어기 또는 자기 학습 퍼지 제어기라고 불리워 진다. 이러한 제어기들은 환경이나 제어과정에 따라 조절되어 플랜트 제어를 조절한다. 첫 번째 자기조절 퍼지제어기는 1976 년 Ma m d a n i에 의해서 자기 조직 알고리즘을 이용하여 제어룰을 조절하고 평가하는
방식이 제안되었다. 또 다른 몇 가지 자기조절 제어기들이 198 9 년 Xu , 198 7 년 S ha o , 198 8 년 Ta n s he it , 19 9 2 년 Ac o s ta 와 Ma yo b ky 그리고 19 9 2 년 Le e d t e l에 의해서 제안되었다. 이러한 자기조절 퍼지 제어기의 대부분은 제어 알고리즘뿐만 아니라 자기 튜닝 알고리즘으로의 기본적인 입력으로서 각 샘플링 시간에 오차와 오차의 변화율을 사용하였다. 그러나 이러한 알고리즘은 언어 평면상에 바람직한 괘도를 설정해야 하고 다양한 파라미터를 갖는 일차시스템에 적용하기 위해서 다 양한 괘도가 필요하므로 플랜트의 제어에 적절치 못하다. 본 연구에서는 이 같은 단점을 줄이고 이해하기 쉬우며 만족스러운 제어성능을 얻기 위하여 시간지연과 플랜트의 기울기를 측정한 후 이를 이용하여 짧은 상승 시간과 정착시간 그리고 가능한한 작은 오버슈트 반응을 할 수 있는 퍼지 제어기를 개발하였으며 공조기 기 시스템을 시간지연을 갖는 일차 시스템으로 가정하여 적용한 제어 결과를 Z ie g le r- Nic ho ls 튜닝의 제어 결과와 비교 하였다.
Ⅱ. 제 어 시 스 템
제어 시스템은 가능한한 상승시간과 정착시간을 줄이고 작은 오버슈트반응을 할 수 있도록 플랜트를 제어해야 한다. 현재 보편화되어 사용되고 있는 Z ie g le r- Nic ho ls 튜닝법의 경우는 플랜트를 제어하기 위해 1/ 4 의 감쇠비에 의하여 간단히 P ID제어기 게인을 조정하고 있으나 플랜트의 파라미터에 따라 오버슈트를 보이고 있어 안정한 응답을 얻기 힘들다. 위와 같은 문제점을 해결하고 만족할 만 한 성능을 얻기 위해 Fig . 1에 나타낸 것과 같이 퍼지 제어기, 포화기, 그리고 제 어의 대상이 되는 플랜트로 이루어진 폐루프 제어시스템을 구성하였다. 퍼지 제어 기는 플랜트 출력과 기준 입력의 차인 오차 e 와 관련된 변수를 입력으로 받아 변 환하여 출력 U를 내보낸다. 실제 구동기의 제어범위는 제한되어 있으므로 제어신 호를 제한하기 위한 포화기를 가정하였다.
F ig . 1 Cont r ol sy st em block diag r am .
제어의 대상이 되는 플랜트는 공조 시스템( 1 ) 즉, 냉동기 슬라이딩 밸브, 삼방밸 브 등을 대상으로 한다. 이러한 공조 시스템의 각 유닛들은 식 ( 1)과 같은 Td초
의 시간지연을 포함한 일차시스템( 2 , 3 )으로 가정할 수 있다.
Y ( s)
C ( s)
=K e
- Tdsτs + 1 ( 1)
여기서 Y ( s) 는 플랜트의 출력, C ( s) 는 플랜트의 입력, τ는 시정수, K 는 정상상 태 게인이다.
Ⅲ. 제 어 알 고 리즘
3 . 1 퍼지 제어기의 형태
퍼지 제어기의 연산은 퍼지화(Fuzz ific a tio n) , 추론(Infe re nc e) , 비퍼지화 (De fuzz ific a tio n) 과정으로 구성되어 있다.
3 . 1. 1 퍼지화
퍼지화기는 절대치의 수치적 정보(C ris p Nume rica l Da ta ) 를 퍼지집합으로 변환 하는 연산자이다. 이러한 변환은 자연적으로 존재하는 시스템과 인공적으로 만들 어진 퍼지 시스템의 인터 페이스(Inte rfa c e ) 에 꼭 필요한 변환으로, 기존의 센서로 부터 추출한 물리량이거나 수치적 명령을 퍼지시스템이 이해할 수 있는 퍼지량으 로 바꾸는 것이다. 퍼지화기 변환 연산자를 기호로 식(2) 와 같이 나타낼 수 있다.
E = F ( e)
(2)여기서 e 는 절대적 수치, E 는 퍼지화된 퍼지집합, F 는 퍼지화 연산자이다. 퍼 지 제어 시스템에 쓰이는 퍼지화 연산방법은 다음과 같다.
・ 퍼지 싱글톤 방법(Fuzzy S ing le to n Me tho d)
절대치 데이터값 자체를 싱글톤 퍼지 집합이라는 특수한 퍼지 숫자(Fuzzy Nu m b e r) 로 취급한다. 즉, e = e0값이 주어진 경우, 이에 대한 퍼지화 연산결과 퍼지 집합 E0는 식(3)과 같은 소속함수로 정의 된다.
m
E0( e) ={
01 ifOth e r w ise e = e
0 (3)퍼지 싱글톤방법은 그 소속함수가 특수한 극한값을 갖는 애매함이 없는 값으로서 그 기능을 구현하기가 쉽고 다른 퍼지 집합과의 연산도 간단하게 처리된다.
・ 이등변 삼각형법
절대치입력에 대하여 소속함수가 이등변 삼각형 모양인 퍼지집합으로 변환시키 는 방법이다. 이 방법에서는 하나의 절대치 입력만을 이용하는 것이 아니라, 일정 한 N개의 과거 데이터 { e0, e- 1, . . . , e- N + 1}를 이용하여 평균치
e 를 구하고,
그 폭은 데이터 표준편차의 두 배가 되도록 하는 것이며 식(4) , 식(5) , 식(6) 에 나 타내었다.e =
1N
N
i = 1
e
i - N (4 )σ = 1
N
N
i = 1( ei - N- e)2 (5)
e
b = 2σ (6)이등변 삼각형법은 제어시스템에 랜덤 노이즈(Ra nd o m No is e ) 가 있는 경우 매우 유용한 퍼지화기법이다.
3 . 1.2 퍼지 추론
퍼지규칙을 이용하여 퍼지 입력에 대한 퍼지 출력을 추론해 내는 장치이다. 추 론하는 형태는 퍼지 모듀스 포넨스(Fuzzy Mo d us Po ne ns ) 와 퍼지 모듀스 톨랜스 (Fuzz y Mo d us To lle ns ) 의 두가지가 있으며 보통 제어에서는 전자의 형태를 쓰고 고장 진단에서는 후자의 형태를 사용한다. 퍼지 모듀스 포넨스는 다음과 같은 논 법을 말한다.
함의(Im p lic a tio n) (전제 1) : If e is A , the n u is B . 입력(Inp ut) (전제 2) : e is A '
추론(Infe re nc e ) (결론) : u is B '
여기서 A , B , A ' , B ' 은 각각 퍼지집합으로 표시되는 양을 나타낸다. 퍼지 추 론 장치에서는 전제 2의 변수값이 전제 1의 값과 다르더라도(즉 A ≠A ' ) 일반 적으로 B 의 값을 계산해 내는 것이다.
3 . 1.3 비 퍼지화
비퍼지화기는 퍼지화기의 역기능을 갖는 장치이다. 즉, 퍼지집합으로 표시되는 퍼 지량으로부터 보통의 절대치를 얻는 변환장치이다. 수학적으로 연산자 DF( ・) 를 써 서 표시하면 다음과 같다.
u
0 =DF ( U) U : 퍼지집합 u
0 : 절대치DF( ・) : De fuzz ifie r O p e ra to r
퍼지제어기의 퍼지 추론 장치가 내는 추론 결과는 제어출력의 가능성 분포 (P o s s ib ility Dis t rib utio n) 를 표시하는 퍼지집합이다. 이 가능성 분포로부터 가장 효과적인 제어기출력값을 정하는 것이 비퍼지화이며, 시스템 설계자 또는 사용자 의 목적에 따라 여러 가지로 정의 하여 쓸 수 있다. 중요한 비퍼지화 방법을 몇가 지 열거하면 다음과 같다.
・ 무게 중심법(Ce nte r o f Gravity Metho d )
가장 많이 쓰이는 비퍼지화법으로서 출력 u0는 식(7)과 같이 계산된다.
u
0=l
i = 1
u
im
0c( ui)l
i = 1
m
0c( ui)(7)
연속공간인 경우는 적분표시로 나타내며, 이 경우 식(8)과 같이 나타내어 진다.
u
0=u m
0c( ui) d um
0c( ui)여(8 )
이렇게 계산된 u0값은 주어진 퍼지집합 C0를 가장 잘 대표하는 숫자값 중의 하 나로 간주되고 있다. 그러나 계산이 복잡하고 따라서 추론결과를 얻는데 시간이 걸리는 단점이 있다.
・ 합중심법(Ce nte r o f S ums Me tho d)
u
0=l i = 1
u
il
i = 1
u
im
c'
k( ui)l i = 1
l
i = 1
m
c'
k( ui)(9)
중첩되는 면적이 있는 경우, 중첩되는 경우 수만큼 중복하여 면적계산에 반영되며 식(9) 에 나타내었다. 무게 중심법과 유사하면서도 중첩부분에 대한 처리가 비상식 적이 면이 있으나 계산시간이 빠르다.
・ 최대면적 중심법(Ce nte r o f la rg e s t a re a Me tho d)
고려하는 출력 퍼지집합이 둘 이상의 볼록형(Co nvex) 퍼지 부분집합으로 구성되 어 있는 경우 u0값은 가장 큰 블록형 퍼지집합만의 무게중심값을 계산하는 것이 다. 역시 계산이 간편하나 작은 블록형집합을 반영하지 못하는 단점이 있다.
3 .2 제 어 알 고 리 즘 의 구 성
3 .2 . 1 무 차원 변수 ARD
3 .2 . 1. 1 기존 퍼지 제어기
기존의 퍼지제어기는 일반적으로 변수의 오차와 오차의 변화율인 e와 e 를 퍼 지 입력으로 사용하여 퍼지화 과정, 추론 과정, 비퍼지화 과정을 거쳐 퍼지 제어 출력을 결정하는 방식으로 구성된다. 이러한 방식은 입력인 e와
e 를 파악하여
룰 베이스에 의해 출력을 계산하는 것으로서 동일한 입력에 대해서 동일한 제어 출력을 계산하게 되며, 퍼지 이론을 효과적으로 이용할 수 있도록 한다. 그러나 시간지연을 갖는 일차 시스템은 동일한 퍼지 입력 e와 e 에 대하여 시스템의 파 라미터에 따라 동일하지 않은 제어 출력을 요구한다. 즉, e와 e 의 입력에 의한 퍼지 출력은 시스템의 시간지연, 시정수 그리고 정상상태 비례 게인을 고려하여 각각의 경우에 적절하게 부합되도록 결정되어야 한다. 그러나 기존의 퍼지 제어기 의 입력과 출력에 대한 멤버쉽 함수(4 )는 각 구간 변수값들이 절대치들로 구성되어 있어 다양한 파라미터를 갖는 일차시스템의 특성을 만족시키지 못하며 일차시스 템의 다양한 파라미터의 변화에 따라 다양한 멤버쉽 함수가 요구되므로 일차시스 템을 제어하는데 부적절하다.3 .2 . 1.2 ARD의 구성
입력 변수 ei와 ei을 측정하여 퍼지 멤버쉽함수에 적용한 기존의 시스템 상태 파악은 일차 시스템을 제어하는데 있어서 적절한 방식이 되지 못하며 이를 대체 하기 위하여 퍼지시스템 입력중의 하나인 오차의 변화율을
e
i를 변형시켜 무 차차원변수 A R Di는 시스템의 적절한 반응으로 가정한 기울기 A Ri와 시스템 반응
의 오차의 변화율과의 차를 백분율 화하여 구성하였다. A Ri은 시스템이 반응해
야 할 각 샘플링 시간에서의 기울기로서 식( 10) 에 나타내었듯이 오차와 시간지연 의 비이다. 시스템의 비례 제어 신호는 플랜트의 반응이 시간지연의 시간동안 기 준입력에 도달하도록 계산되어 출력되도록 하였으므로 AR값은 시간지연을 기준으 로 구성되었다. A R Di는 적절한 기울기 A Ri과 시스템의 오차 변화율과의 차이
에 대한 비로서 현재 시스템이 적절한 반응을 보이는 정도를 나타내고 있으며 식 ( 1 1) 과 Fig . 2 에 나타내었다.
A R
i= -e
iT
d( 10)
A R D
i=A R
i- eiA R
i ×100 ( 1 1)F ig . 2 S ch em at ic of A Ri .
3 .2 . 1.3 퍼지 입력 변수 ARD
무 차원변수 A R Di를 퍼지 입력 변수로 사용하여 계산한 제어 신호는 시스템
의 제어 반응을 적절한 기울기 AR로 거동할 수 있도록 하였다. 또한 무 차원 변 수로 구성된 A R Di 입력 변수는 각 샘플링 시간에서 측정된 e 를 정규화 시킴으
로서 다양한 시스템의 특성을 만족시킬 수 있다. 즉, 각 샘플링 시간에서 측정된
e
i를 정규화시켜 일반화함으로써 다양한 시스템 파라미터를 갖는 일차 시스템을단일의 멤버쉽 함수로 만족시킬 수 있도록 구성하였다.
3 .2 .2 초기 비율 IR
3 .2 .2 . 1 시스템의 반응성
시간지연을 갖는 일차시스템은 시간지연, 시정수 그리고 정상상태 비례게인의 파라미터에 따라 시스템 입력신호에 대하여 다양한 반응을 보인다. 즉, 같은 입력 신호에 대하여 시스템 파라미터에 따라 반응속도 등에서 차이를 보인다. 그러므로 시간지연을 갖는 일차시스템을 적절하게 제어하기 위해서는 시스템 파라미터인 시간지연, 시정수 그리고 정상상태 비례게인의 요소들에 의한 시스템의 반응성을 파악하는 것이 중요하다. 이들 요소중 시간지연은 시스템의 초기 구동시 시스템고 유의 시간지연이 나타나므로 이것을 측정하여 파악했으며 시정수와 정상상태 비 례게인의 파악과정은 다음과 같다. 시정수와 정상상태 비례게인은 각각 시간에 대 한 반응정도와 정상상태에 도달했을 때의 기준입력에 대한 비례값으로서 두 개의 요소 모두는 시간에 대한 그래프의 기울기에 영향을 미친다. 정상상태 비례 게인 은 기울기뿐만 아니라 시스템의 정상상태 한계치를 나타내는 또 다른 성질을 가 지고 있어 이의 파악은 좀 더 신속하고 정확한 제어를 가능하게 하지만 시정수와 정상상태 비례게인을 분리하여 파악하는 것은 난해한 일이다. 그러므로 시정수와 정상상태 비례게인의 복합작용이 플랜트 반응에 미치는 영향을 측정하여 복합적 으로 두 가지 요소를 파악하였다. 먼저, 시간지연 동안 설정입력에 게인 1. 1의 비 례제어를 적용한 신호를 플랜트에 입력시킨 후 시간지연이 끝난 첫 번째 샘플링 시간에서의 기울기를 측정하고 이 시스템의 시간지연과 동일한 크기의 시정수를 갖으며 정상상태 비례게인이 1 인 시스템( 비교 기준 시스템) 을 가정하여 같은 조 건에서 이 시스템의 기울기 데이터와 비교했다. 비교 기준 시스템의 데이터는 시 뮬레이션을 통하여 미리 파악되었으며 파악된 데이터와 실제 시스템의 기울기 비 로서 반응성을 파악하였고 기준 시스템과 실제 시스템의 초기 기울기 비를 초기 비율 IR이라 하고 식(12) 에 나타내었다.
IR =
시스템 초기 기울기기준 모델 초기 기울기 ( 12)
3 .2 .2 .2 반응비 IR
두 가지 시스템의 비는 같은 설정입력에 대한 반응 비이므로 실제 시스템이 기 준 시스템에 비하여 더 빠르거나 혹은 느린 반응을 보이는 반응의 정도를 파악할 수 있다. 퍼지 출력값은 기준 시스템의 파라미터를 기준으로 계산하였고 이 두 가 지 시스템의 비를 퍼지 출력에 곱하면 플랜트 제어 신호는 실제 시스템의 시정수 와 정상상태 비례게인에 의한 영향이 고려되어 졌음을 알 수 있다. 또한 기준모델 의 정상상태 비례게인의 값을 1 로 선정하여 플랜트 반응의 발산 가능성을 줄였 다.
3 .2 .3 퍼지 제어기
퍼지 제어기의 입력 변수로서 시스템 반응에 의하여 발생하는 오차값을 측정하 여 이를 변환시킨 e , ARD를 사용하였다. 퍼지 제어기는 Fig . 3의 블록 다이어그 램을 나타냈듯이( 5 ) 입력 변수 e 와 ARD를 퍼지룰에 적용시켜 크리스프(C ris p) 한 수치적 정보를 퍼지 집합으로 변환하는 퍼지화 과정(Fuzz ific ia tio n) , 퍼지 규칙을 이용하여 퍼지입력에 대한 퍼지출력을 추론해 내는 추론 과정(Infe re nc e me c ha nis m) 그리고 퍼지 집합으로 표시되는 퍼지량으로부터 보통의 수치값을 얻 는 비퍼지화 과정(De fuzz ific a tio n)을 거친 후 크리스프(C ris p)한 출력을 내 보낸 다. 본 연구에서는 퍼지화하기 위한 멤버쉽 함수로 삼각형 연속 멤버쉽 함수를 사 용하였고 최종 추론 결과를 얻기 위하여 최소 최대법(Min- Ma x metho d) , 최종적 인 결정을 위해 면적 중심법(Ce nte r o f Gravity) 을 사용하였다.
F ig . 3 Block diagr am of F u zzy alg or it hm
퍼지룰을 이용한 PID제어기의 흐름도가 Fig . 4 에 나타나있다. 그림에서 보듯이 계단입력에 대한 플랜트의 출력에 변화가 없는 시간지연 시간동안은 게인 1.1의 비례제어기를 사용하여 제어하였으며, 출력에 변화가 나타나면 Td와 출력의 기울 기 r'을 측정하고 Td와 τ가 같은 경우에 대한 같은 시간의 기울기 r을 계산하여 IR을 계산하였다. 계단입력값과 플랜트 출력값의 차인 오차 ei를 측정한 후 오차
의 변화율 ei를 계산하였으며 A Ri와 A R Di를 계산하였다.
F ig . 4 F low dia gr am of fu zzy aut o- t un in g P ID alg or ith m .
3 .3 비 례- 미분 - 적 분 제 어
3 .3 . 1 비례 제어
각 오차값에 따른 A Ri값을 파악하여 A R Di값이 결정되면 오차와 A R Di 값을 퍼지 입력 변수로 사용하여 퍼지 출력값 Up i를 계산하였다. 비례제어 퍼지 출력 값은 시스템의 반응성을 고려하기 위해 제어신호에 곱하여지는 IR을 시스템의 상 황에 따라 조정하기 위해 사용하였다. 즉, 퍼지 출력값 UP i는 Ta b le 1에 나타나 있는 룰 베이스에 따라 오차값이 클 경우 신속한 반응을 나타내기 위하여 조건에 따라 식( 13) 또는 식( 14) 에 대입되어 큰 값이 출력되도록 하였으며 오차값이 작아 짐에 따라 시스템의 수렴을 위해 작은값이 출력 되도록 대입되었다. 측정된 IR값 이 1 보다 크거나 작음에 따라 퍼지 출력 UP i는 식( 13) 또는 식(14) 에 대입되었 으며 이와 같이 조절된 계산결과는 비례 제어값을 결정하기 위해 사용되어졌다.
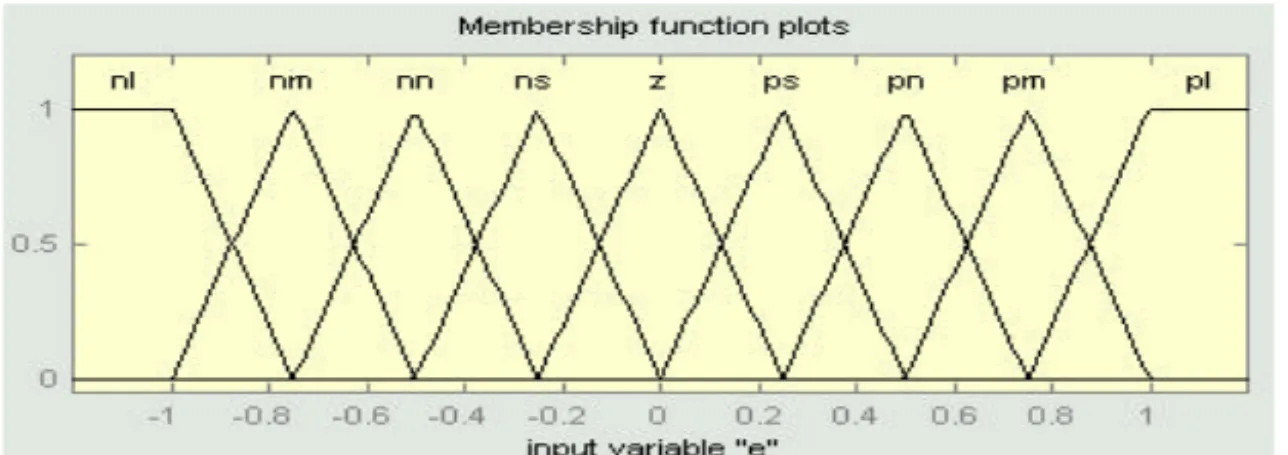
이와 같이 계산된 결과치를 조합하여 비례제어를 위한 제어 입력 신호를 식( 16) 에 나타냈었다. 비례제어는 비교 기준 시스템 즉, 시정수와 시간지연이 동일하다고 가정한 시스템의 파라미터를 기준으로 제어신호를 결정한 후 실제 시스템의 반응 성을 고려해 주기 위하여 보상비 Hi를 곱하여 비례 제어신호를 구성하였다. 비교 기준 시스템의 파라미터를 기준으로 제어신호를 결정하기 위하여 시스템의 오차 값이 측정되면 현 시점부터 시간지연의 시간동안 플랜트가 설정입력에 도달하도 록 하기 위하여 시간지연과 시정수가 같은 시스템에서 시간지연 시간동안 원하는 값에 도달할 수 있도록 하는 제어 신호는 원하는 값에 1/ 0 .632 이 곱해진 값이어 야 하므로 ARD값을 시정수 측정 범위인 63 .2% 로 나누었으며 식( 15) 에 비례 제어 를 위한 비례게인을 나타내었다. Fig . 5 에서 Fig . 7까지 퍼지 제어기의 멤버쉽 함 수와 Ta b le 1을 룰 베이스를 작성하였다.
H
i= 1 + UP i×( 1IR
- 1)IR < 1
( 13)H
i= 1IR
+ UP i×( 1 - 1IR
)IR ≥1
( 14 )P
i =( A R0 . 632i- e ×Hi+ yi - 1- Ci - 1)
T
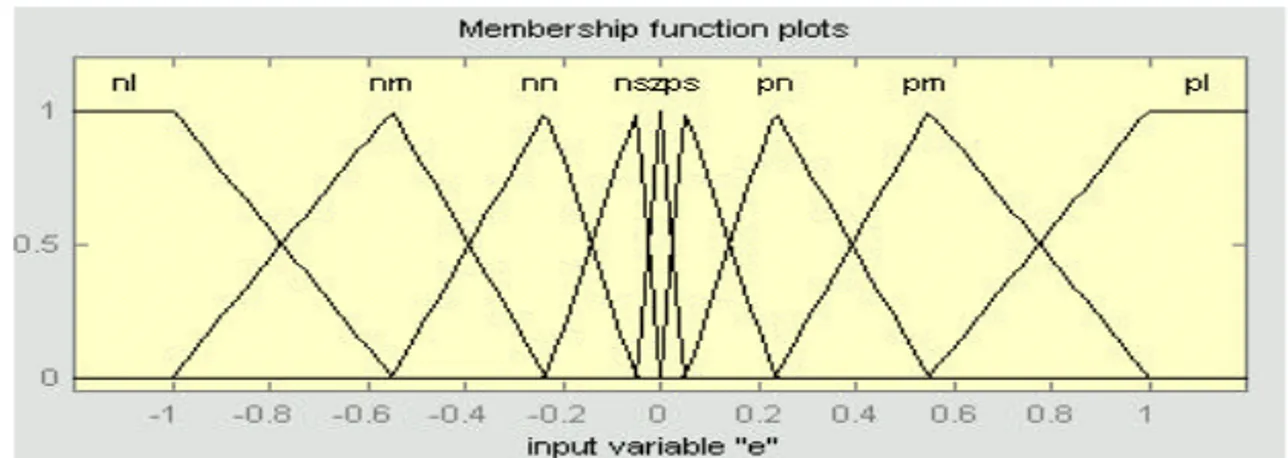
d・ei ( 15)Fig . 5 에 나타나 있는 그림은 입력 변수 ei에 관한 멤버쉽 함수로서 오차가 0 인 것을 기준으로 하여 오차 구간을 모두 아홉 등분하여 함수를 구성하였다. Fig . 6 에 나타나 있는 그림은 입력 변수 A R Di에 관한 멤버쉽 함수로서 모두 아홉 개
의 구간으로 구성되어 있으며 변수값들은 A Ri과 ei와 차를 A Ri로 나누어준 무
차원 변수로 구성하였다.
F ig . 5 M em b er ship fun ction of in pu t
e
i.F ig . 6 M ember ship fun ction of input A R Di.
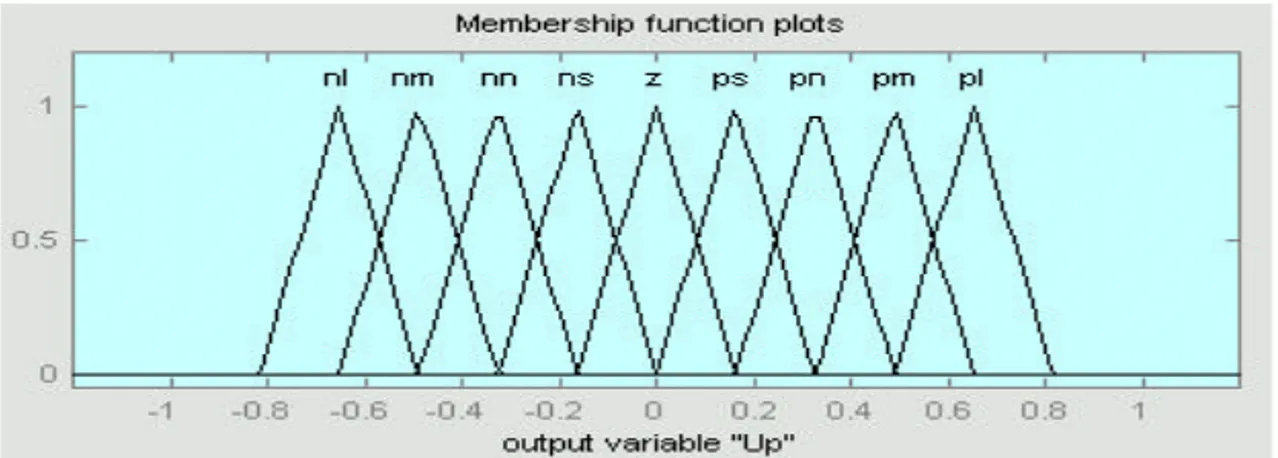
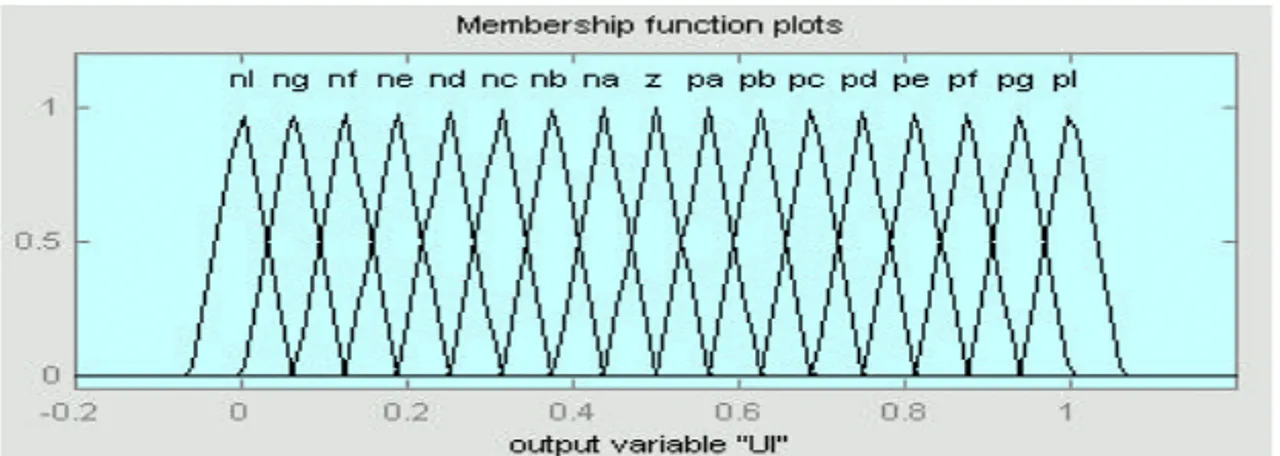
Fig . 7 에 나타나 있는 멤버쉽 함수는 출력 변수 UP i에 관한 함수이며 초기 비율
IR값을 퍼지 입력 변수 오차 ei와 A R Di를 사용하여 Ta b le 1의 룰 베이스에 따
라 적절히 조절하는 비례제어 퍼지 출력 UP i를 결정하였다.
F ig . 7 M em b er sh ip fu n ct ion of out pu t UP i.
T able 1 Rules for
U
P iU
P ie
iNL NM NN N S Z P S PN PM PL
A R Di
NL PL PM PN PN PN P S P S P S Z NM PM PN PN PN P S P S P S Z P S NN PN PN PN P S P S P S Z P S P S N S PN PN P S P S P S Z P S P S P S Z PN P S P S P S Z P S P S P S PN P S P S P S P S Z P S P S P S PN PN PN P S P S Z P S P S P S PN PN PN PM P S Z P S P S P S PN PN PN PM PL Z P S P S P S PN PN PN PM PL
3 .3 .2 적분 제어
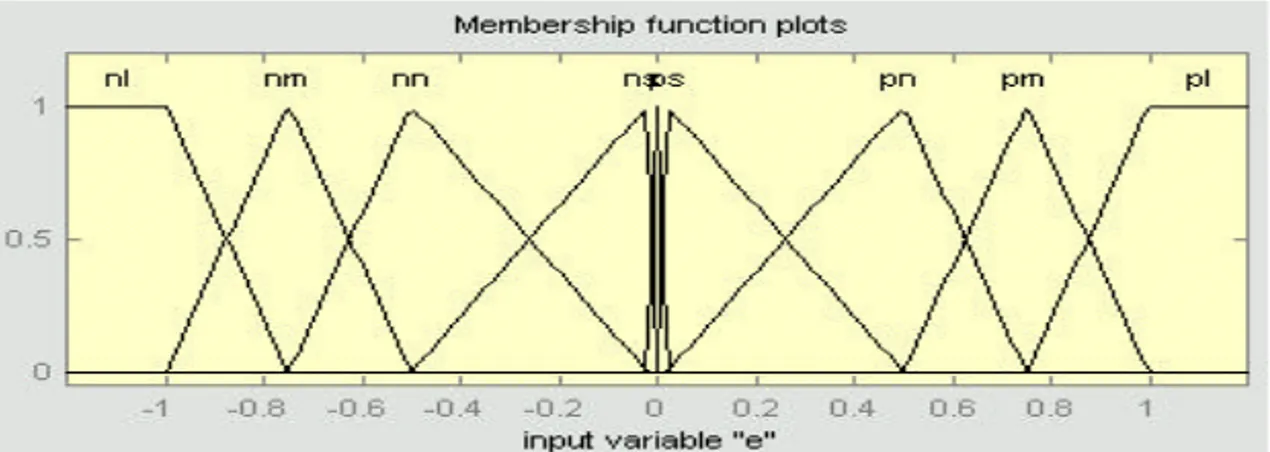
일정한 정상 상태 오차를 제거 또는 줄이기 위하여 적분제어를 사용하였으며 적분제어의 게인을 조정하기 위하여 Fig . 8 에서 Fig . 10까지의 멤버쉽 함수와 Ta b le . 2 의 룰 베이스를 구성하였다. 적분제어는 전형적으로 과도한 오버슈트와 정착 시간을 연장시키는 등 과도 응답을 나쁘게 만드는 경향이 있다. 이러한 결점 을 막기 위하여 ARD값이 90% 에서 110%까지 그리고 - 90% 에서 - 110%까지의 범위에서 오차가 존재할 때 즉, 시스템 반응이 작은 변화를 나타내고 있는 조건에 서 적분제어가 작동할 수 있도록 룰 베이스를 구성하였다. 이러한 룰 베이스의 구 성은 시스템 반응이 변화를 나타내지 않는 조건에서 적분제어가 가능하도록 함으 로서 상승시나 오실레이션 발생시 적분제어에 의한 오버슈트의 가능성을 줄이고 일정한 정상상태 오차의 발생시 적분제어가 가능하도록 함으로서 적절한 제어가 가능하도록 하였다. 오차 ei의 멤버쉽 함수에서 오차의 음의 영역과 양의 영역이 중복되는 지점인 z 에서는 중복을 피하면서 가능한 같은 효과를 나타내기 위하여
범위를 좁혔다. 적분 제어를 위한 적분 게인을 식(16) 에 나타내었다.
I
i =P
iU
I i( 16) .
Fig . 8 에 나타나 있는 멤버쉽 함수는 적분제어를 위한 퍼지 입력 변수 오차 ei에 관한 그림으로서 오차가 0 인 것을 기준으로 하여 오차 구간을 모두 아홉 등분하 여 함수를 구성하였다. 또한 오차의 음과 양의 영역이 교차하는 영역인 Z 에서는 혼선을 피하기 위하여 가능한 범위를 좁혔다. Fig . 9 에 나타나 있는 그림은 입력 변수 A R Di에 관한 멤버쉽 함수로서 모두 아홉 개의 구간으로 구성되어 있으며
변수값들은 A Ri과 ei와 차를 A Ri로 나누어준 무 차원 변수이다. A R Di에 관
한 멤버쉽 함수 중 p m과 nm의 구간 범위를 90% 에서 110%까지 그리고 - 90% 에 서 - 110%까지 지정함으로서 이 범위에서 적분제어가 가능하도록 하였다.
F ig . 8 M em b er ship fu n ct ion of In pu t
e
i.F ig . 9 M ember ship fun ction of input A R Di.
Fig . 10 의 멤버쉽 함수는 적분제어의 퍼지 출력
U
I i에 관한 함수로서 시스템의 반응이 일정한 오차를 가지며 정상상태를 유지할 때 적분 제어를 가능하도록 구 성하였다.F ig . 10 M em b er ship fu n ct ion of out pu t
U
I i.T able 2 Ru les for
U
I iU
I ie
iNL NM NN N S Z P S PN PM PL
A R Di
NL NL NL NL NL NL NL NL NL NL
NM PL PL PL PL NL NL NL NL NL
NN NL NL NL NL NL NL NL NL NL
NS NL NL NL NL NL NL NL NL NL
Z NL NL NL NL NL NL NL NL NL
P S NL NL NL NL NL NL NL NL NL
PN NL NL NL NL NL NL NL NL NL
PM NL NL NL NL NL PL PL PL PL
PL NL NL NL NL NL NL NL NL NL
3 .3 .3 미분 제어
미분제어는 감쇠를 크게 하고 시스템의 안정도를 개선시키기 위하여 비례 및 적분제어와 함께 조합하여 사용되었다. 그러나 과도한 미분제어는 시스템을 불안 정하게 만들 수 있으므로 미분 제어의 퍼지 출력 UD i은 Ta b le . 3 에 룰 베이스에 따라 시스템의 반응이 기준 입력으로부터 이탈하고 있다면 미분게인의 값을 크게 하여 오버슈트 발생을 감소시켰으며 시스템의 반응이 기준입력으로 향하는 경우 에는 시스템의 발산을 막기 위하여 미분게인의 값을 작게 하였다. 미분 게인은 시 스템의 반응성을 고려해 주어야 하므로 시스템의 제어 신호와 현재 시스템 반응 의 차를 기준으로 결정되었으며 식( 17) 에 나타내었다. 미분게인에 관한 입력과 출 력에 관한 멤버쉽 함수를 Fig . 11에서 Fig . 12까지 나타내었다.
D
i = | Ci - 1- yr| × UD iP g a in
i( 17)
Fig . 1 1에 나타나 있는 멤버쉽 함수는 미분제어를 위한 퍼지 입력 변수 오차 ei 에 관한 그림으로서 세밀한 제어를 위하여 오차가 작아질수록 각구간으 범위를 좁혔다. Fig . 12 에 나타나 있는 그림은 입력 변수 A R Di에 관한 멤버쉽 함수로서
모두 아홉 개의 구간으로 구성되어 있다.
F ig . 11 M em b er ship fu n ct ion of input
e
i.F ig . 12 M ember ship function of input A R Di.
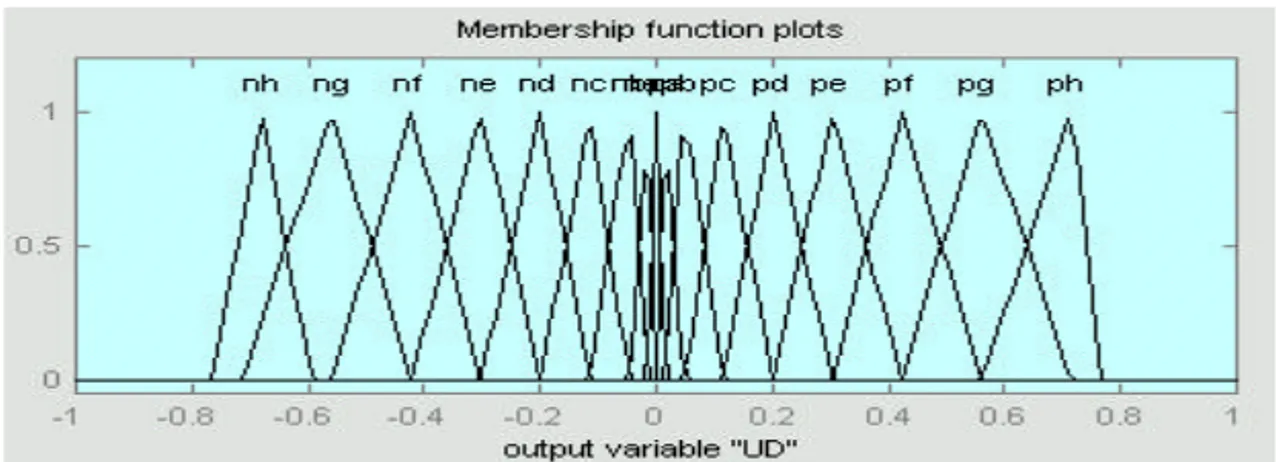
Fig . 8 에 멤버쉽 함수는 미분제어의 퍼지 출력 UD i에 관한 함수이며 시스템의 반
응이 설정입력으로부터 이탈과 접근에 따라 미분제어의 게인을 결정하기 위해 Ta b le 3 의 룰베이스를 구성하였다.
Fig . 13 M ember ship fun ction of output
U
D i.T able 3 Ru les for
U
D iU
D ie
iNL NM NN N S Z P S PN PM PL
A R Di
NL PL PL PM PM PN Z Z Z Z
NM PL PM PN PN P S Z Z Z Z
NN PM PN PN P S Z Z Z Z Z
NS Z Z Z Z Z Z Z Z Z
Z Z Z Z Z Z Z Z Z Z
P S Z Z Z Z Z Z Z Z Z
PN Z Z Z Z Z P S PN PN PM
PM Z Z Z Z P S PN PN PM PL
PL Z Z Z Z PN PM PM PL PL
각각의 비례, 적분, 미분의 퍼지 알고리즘에 의하여 계산된 퍼지출력 Up i,
U
I i,U
D i를 사용하여 비례게인 Pi, 적분게인 Ii, 미분게인 Di를 계산하였으며아래와 같은 PID알고리즘을 사용하여 프랜트를 제어하기 위한 제어기의 출력 Ci
를 식(18)과 같이 결정하였다.
C
i= Pi(
1 +I
1ied t + D
ide
d t )
( 18 )Ⅳ 시 뮬 레 이션
4 . 1 시 뮬 레 이 션 구 성
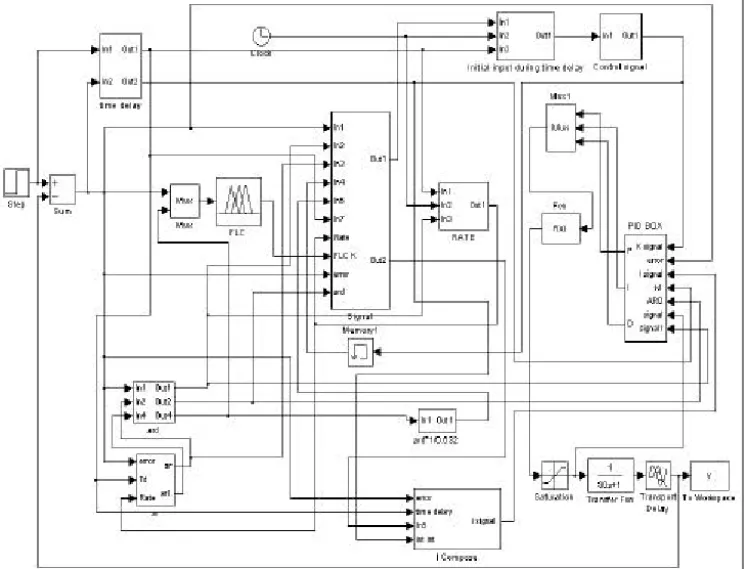
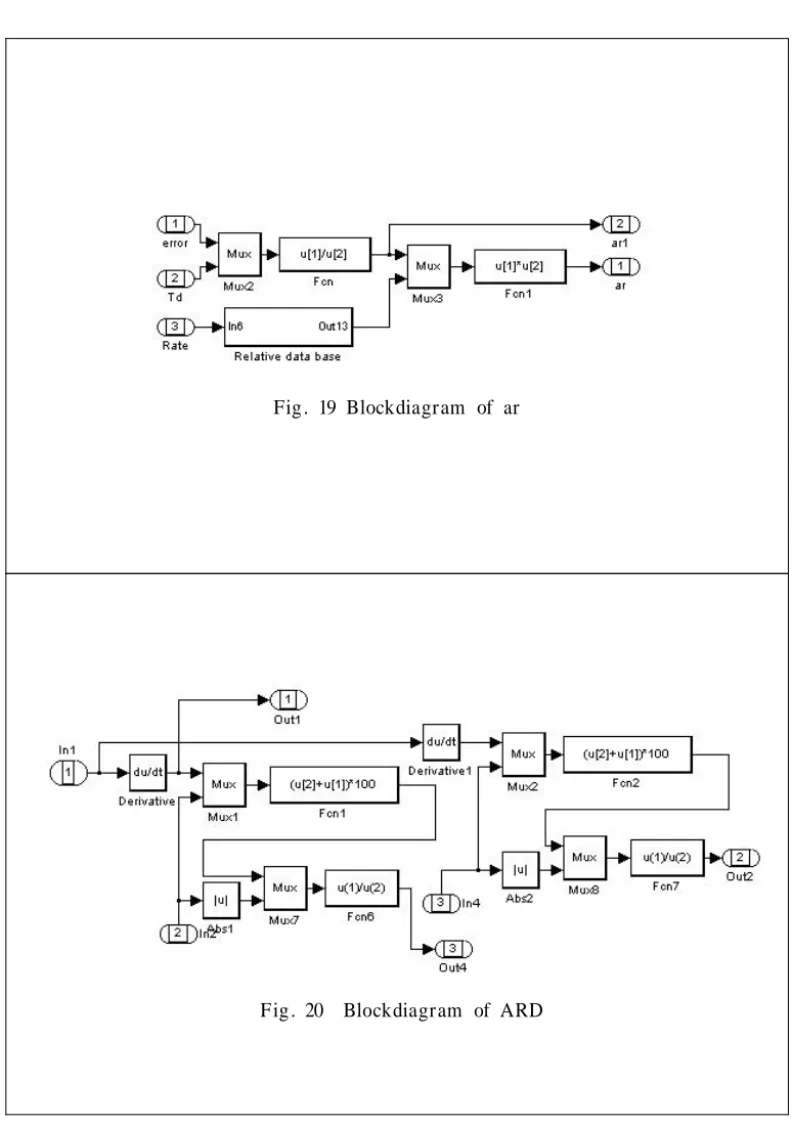
시뮬레이션 실행을 위하여 MATLAB프로그램을 사용하여 다음과 같은 시뮬링크를 구성하였다. Fig . 14 에 전체 시스템에 대한 블록 다이어그램을 나타내었다. Fig . 15 에 비례제어를 위한 신호에 대한 블록 다이어그램을 나타내었으며 Fig . 16 에 데이터를 이용하여 시스템의 반응성을 파악하는 블록 다이그램이 나타나 있다.
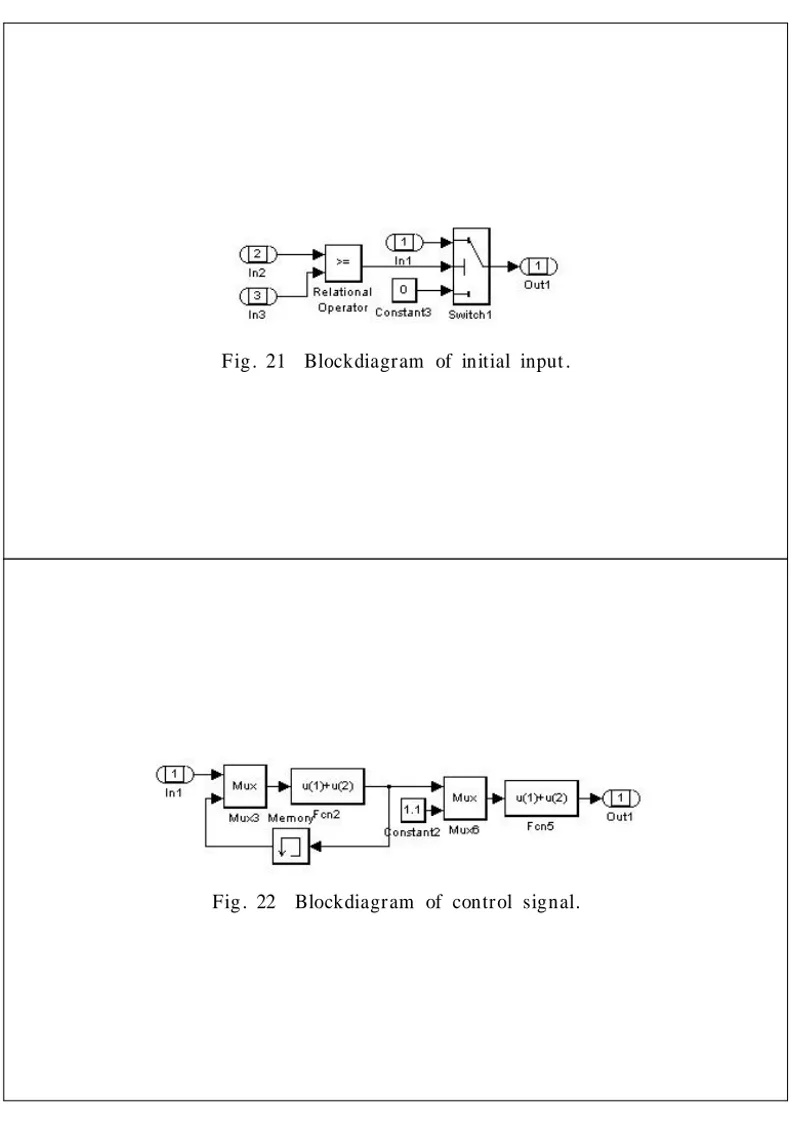
Fig . 17 에 적분제어를 위한 블록 다이어그램이 나타나 있으며 Fig . 18 에 시간지연 을 측정하기 위한 블록 다이어그램을 나타내었다. Fig . 19 에 A Ri를 계산하기 위 한 블록 다이어그램과 Fig . 20 에 A R Di를 계산하기 위한 블록 다이어그램을 나타 내었다. Fig . 2 1과 Fig . 22 에 초기 제어신호를 계산하기 위한 블록 다이어그램을 나타내었다.
Fig . 14 Blockdiagr am of sy st em .
F ig . 15 Blockdiagr am of signal
F ig . 16 Blockdiagr am of Rat e
F ig . 17 Blockdiagr am of I compose
F ig . 18 Blockdiagr am of tim e delay
Fig . 19 Blockdiagr am of ar
F ig . 20 Blockdiagr am of ARD
F ig . 21 Blockdiagr am of initial input .
Fig . 22 Blockdiagr am of contr ol signal.
4 .2 시 뮬 레 이 션 결 과
위에서 언급한 방법들을 사용하여 퍼지제어기를 사용한 제어 시뮬레이션 프로 그램을 개발하였으며, 플랜트에 단위 계단입력을 사용하여 플랜트의 제어결과를 분석하였다. 본 연구에서는 퍼지 P ID 제어기를 이용한 제어 시스템의 단위 계단입 력에 대한 제어결과를 분석하기 위하여 플랜트의 시정수와 시간지연의 상대적인 크기에 따라 Ta b le 4 와 같이 세 가지 유형의 플랜트로 나누어 분석하였다. 플랜트 1은 시정수 3 0 초, 시간 지연 3 0 0 초이며 플랜트 2 는 시정수 3 0 초, 시간 지연시간 3 0 이고 플랜트 3 은 시정수 3 0 0 초 시간지연 3 0 초로 가정하였으며 Ta b le 에 각 플 랜트 타입별 형태를 정리하였다. 세가지 플랜트에 대하여 퍼지 PID 제어기(Fuzzy) 와 Zieg le r- Nic ho ls 기법을 이용한 PID 제어기(Z- N)를 사용한 경우를 시뮬레이션 하여 각각 Fig . 23 , Fig . 24 , Fig . 25 에 비교하였으며 오버슈트와 정착시간 그리고 상승시간을 Ta b le 5 에 나타내었다. 시뮬레이션 결과에서 볼 수 있듯이 퍼지 PID 제어기를 사용할 경우 기존의 PID 제어기를 사용한 경우에 비해 과도 응답이 우 수함을 알 수 있었다.
T able 4 P lan t t y pes
P lant τ (sec)
T
d(s ec )1 300 30
2 30 30
3 30 300
Fig . 2 3 에 나타나 있는 것처럼 플랜트 1의 경우 fuzz y c o nt ro lle r에 의한 제어에 서는 오버슈트가 13% 정도임에 반하여 Zieg le r- Nic ho ls 튜닝의 경우 79%로 기존 제어방법의 오버슈트가 더 큼을 알 수 있다. 정착 시간은 퍼지 제어기가 28 9 초임 에 반하여 기존의 제어방법의 경우 4 56 초로 fuzzy c o ntro lle r가 1.57 배 정도 앞당 긴 것을 알 수 있다. 상승 시간에 있어서는 fuzzy c o ntro lle r가 134 초, 기존 제어 방법이 97 초로 기존 제어방법에 의한 제어가 상승시간이 더 작음을 알 수 있다.
그러나 상승시간에 의하여 얻어진 이득보다는 과도한 오버슈트에 의한 플랜트의 불안정성을 초래할 수 있는 단점이 더 크므로 fuzzy c o ntro lle r의한 제어가 더 적 절함을 알 수 있다.
Fig. 23 Control result for plant 1 ( τ/ Td= 10 ).
플랜트 2의 경우 퍼지 제어기에 의한 제어에서는 오버슈트가 1.3% 의 오버슈트가 발생함에 비하여 Zie g le r- Nic ho ls 튜닝의 경우 4 .8 % 로 퍼지 제어기에 의한 제어 가 더 작음을 알 수 있다. 정착 시간은 퍼지 제어기가 177 초임에 반하여 기존 제 어방법의 경우 24 1초로 퍼지 제어기가 64 초 정도 빠르게 정착한 것을 알 수 있 다. 상승 시간에 있어서는 퍼지제어기가 119 초, 기존 제어방법이 13 1초로 기존 제어방법에 의한 제어가 상승시간이 더 큼을 알 수 있다.
Fig. 24 Control r esult for plant 2 ( τ/ Td= 1).
플랜트 3의 경우 퍼지 제어기에 의한 제어에서는 오버슈트가 26% 정도의 오버슈 트가 발생하며 Zie g le r- Nic ho ls 튜닝의 경우 0 .5% 로 기존 제어방법에 의한 제어 가 더 작음을 알 수 있다. 정착 시간은 퍼지 제어기가 174 5 초임에 반하여 기존 제어방법의 경우 2734 초로 퍼지 제어기가 1.57 배정도 빠르게 정착한 것을 알 수 있다. 상승 시간에 있어서는 퍼지 제어기가 997 초, 기존 제어방법이 2973 초로 기 존 제어방법에 의한 제어가 상승시간이 더 큼을 알 수 있다. 퍼지 제어기에 의한 제어가 기존 제어방법의 경우보다 오버슈트가 더 크게 발생하나 기존 제어방법의 경우 상승시간이 장 시간 소요되므로 절절한 제어방법이 아님을 알 수 있다.
Fig. 25 Control result for plant 3 ( τ/ Td= 0 . 1).
위의 결과들을 비교해 볼 때 퍼지 제어기에 의한 제어가 Zieg le r- Nic ho ls 튜닝에 의한 제어에 비해 오버슈트, 정착시간, 상승 시간 등에서 더 나은 성능을 보임을 알 수 있다. 그러나 τ/ td= 10 인 모델 1과 τ/ td= 0 . 1 인 모델 3 에서
Z ie g le r- Nic ho ls 튜닝의 결과가 각각 상승시간과 오버슈트에서 퍼지 제어기보다 앞 서는 성능을 보이고 있음을 알 수 있다. 그러나 이러한 잇점에도 불구하고 모델 1 에서는 과도한 오버슈트 그리고 모델 3 에서는 장시간의 상승시간으로 인하여 이 러한 파라미터를 가지고 있는 1차 시스템의 제어에 적절하지 않음을 알 수 있으 며 퍼지제어기가 시스템의 운영에 더 적절하다고 볼 수 있으며 결과를 다음과 같 이 정리하였다.
T able 5 S im u lat ion r esult s
Plant 1 Plant 2 Plant 3
Fuzzy Z- N F uzzy Z- N Fuzzy Z- N
M
p(%) 13 79 1.3 4.8 26 0.5T
s(sec) 289 456 177 241 1745 2734T
r(sec ) 134 97 119 131 483 29732Ⅴ. 결 론
제어 대상인 공조시스템의 각 개별단위들의 수학적 모델을 1차식으로 가정하여 플랜트의 오차 e 와 ARD를 퍼지제어기의 입력으로 받아 출력을 내보내는 퍼지 제 어기를 개발하였다. 퍼지 제어기에 의한 제어결과와 Zie g le r- Nic ho ls 튜닝의 제어 결과와 비교할 때 오버슈트 정착 시간 상승시간에서 퍼지제어기의 성능이 앞섬을 알 수 있었다. 특히 시간지연대 시정수의 비가 10 인 경우 66%의 오버슈트 감소 와 정착시간에서 1.57 배의 성능이 앞서 있으며 비가 0 . 1인 경우 정착시간에서 1.5 6 배, 상승시간에서 6 1.5 배 성능이 앞서 있음을 확인하였다. 이와 같이 시정수 와 시간지연의 비가 크거나 또는 작은 경우의 시스템에 대하여 안정적인 제어에 효과적으로 사용될 수 있음을 알 수 있었다. 본 연구에서 개발된 퍼지제어기가 공 조시스템의 안정적 운영과 보호를 위해 효과적으로 사용될 수 있음을 확인하였다.
참 고 문 헌 ( Re f e re n c e )
1. 한도영. 김영훈, 19 9 9 , 전부하 빙축열 시스템의 최적 제어, 공기조화 냉동공학회 발표 논문집, p p . 557- 562 .
2 . Ge ne F. Fra n klin . , J . Da vid Pow e ll., Ab ba s E m a m i- n a e in i. , 19 9 7 , F e e d b a c k C o n t ro l o f Dyna m ic Sys te m s , 3t he d ., Ad d is o n We s le y , p p . 2 04 - 2 3 6 .
3 . Arma nd o B. Co rrip io . , 19 9 6 , Tu ning o f In d us t ria l Co nt ro l Sys te m IS A, p p . 9 7 - 98 .
4 . Pa s s ino . K. M. a nd Yu kovic h , S ., 19 9 7 , Fuzz yCo nt ro l, Ad d is o n We s ley , p p . 2 2 - 4 8 .
5 . 변증남, 19 9 7 , 퍼지 논리 제어, 홍능 과학 출판사, p p . 1 10 - 124 .
A b s t ra c t
De s ig n of Auto - t uning Fuzzy P ID Co ntro lle r
Yo ng s u ng c ho De pt . fo me c ha nic a l Eng ine e ring G ra d ua te S c ho o l Ko o kmin Unive rs ity (Dire c te d by Do yo ung Ha n P h . D)
A fuzz y a uto - t u ning P ID a lg o rit h m wa s d e ve lo p e d in o rd e r to c o nt ro l t he firs t o rd e r time d e la ye d s ys te m . The e rro r, b e tw e e n re fe re nc e in p ut a nd p la nt o ut p ut , a nd it 's m o d ifie d s lo p e w e re us e d a s in p ut va ria b le s . Ga ins o f t he P ID a lg o rit h m w e re o b ta ine d fro m t he fuzz y a lg o rit h m . In o rd e r to c he c k t he e ffe c tive ne s s o f t his a lg o rit h m , t h re e d iffe re nt ty p e s o f p la nt w e re s e le c te d . Co nt ro l re s ults fro m t he fuzz y t u ne d a lg o rit h m w e re c o m pa re d w it h t ho s e fro m t he Z ie g le r- Nic ho ls t u ne d P ID a lg o rit h m . Re s u lts s how t ha t t he new ly d e ve lo p e d c o nt ro l a lg o rit h m is mo re e ffe c tive t ha n t he c o nve ntio na l c o nt ro l a lg o rit hm fo r t he c o nt ro l o f t he firs t o rd e r tim e d e la ye d sys te m .