윤곽 검출용 CMOS 시각칩을 이용한 물체 추적 시스템 요소 기술 연구
현효영·공재성 * ·신장규 * †
Fundamental research of the target tracking system using a CMOS vision chip for edge detection
Hyo-Young Hyun, Jae-Sung Kong *, and Jang-Kyoo Shin * †
Abstract
In a conventional camera system, a target tracking system consists of a camera part and a image processing part.
However, in the field of the real time image processing, the vision chip for edge detection which was made by imitating the algorithm of humanís retina is superior to the conventional digital image processing systems because the human retina uses the parallel information processing method. In this paper, we present a high speed target tracking system using the function of the CMOS vision chip for edge detection.
Key Words : edge detection, vision chip, target tracking
1. 서 론
물체의 이동에 선택적으로 응답하는 시스템에서는 이동하는 물체의 좌표를 인식하는 과정이 필요하다 .
일반적으로 널리 사용 되는 영상 시스템에서는 CCD (charge coupled device) 카메라로 영상을 획득한 후 , PC 로 전송해 소프트웨어적인 영상처리 알고리듬을 이 용하여 물체의 좌표를 인식한다 . 따라서 영상을 획득 하는 부분과 획득된 영상정보를 처리하는 부분이 구분 되어 있어서 정보의 양이 많은 영상정보의 특성상 실 시간 정보처리가 어렵고 소프트웨어적인 영상처리 알 고리듬의 구현을 위해 PC 와 같은 추가적인 프로세서
가 요구된다 [1,2] .
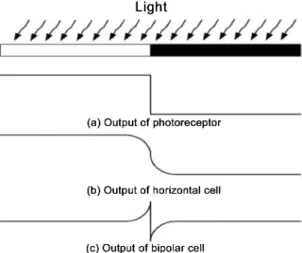
그러나 수평세포들 간의 병렬 신호처리를 통해 물체 의 윤곽을 검출하는 인간 망막의 영상처리 메커니즘을 모방해 영상획득과 신호처리의 기능을 CIS(CMOS
image sensor) 와 저항망 및 신호처리 회로를 이용하여
구현한 윤곽 검출용 시각칩의 경우 , 병렬 신호처리를 통해 물체의 전체 영상정보가 아닌 윤곽 영상정보만 이용할 수 있으므로 화소의 증가에 따라 영상처리에 제약을 받지 않고 실시간 영상처리 시스템에 효율적으
로 적용이 가능하다 [3-10] .
본 연구에서는 윤곽 검출용 시각칩이라는 일반적이 지 않은 지능형 이미지 센서의 활용 가능함을 증명하
기 위해 시각칩의 출력을 FPGA 의 간단한 신호처리를
통해 물체의 위치 추적 및 시선 결정 시스템을 설계 및 제작하였다 . 제작된 시스템은 일반적인 시각 시스템과 달리 PC 와 같은 추가적인 소프트웨어 프로세서 없이
실시간 정보처리가 가능하고 기존의 물체 추적 시스템 에 비해 간결하고 규모면에서도 효율적인 시스템으로 구현하였다 .
2. 이론 및 설계
인간의 눈은 실시간으로 전체 영상 정보를 뇌로 전 달하지 않고 피사체의 움직임이나 윤곽 부분을 중점적 으로 인식하는 것을 통해 뇌로 전달되는 정보의 양을 획기적으로 줄여 뇌에 걸리는 부하를 줄여준다 [12,13] .
이러한 과정을 통해 인간의 망막은 시각 신경계통의 신호처리를 가장 이상적이고 효율적으로 수행하는 곳
경북대학교센서및디스플레이공학과
(Department of Sensor and Display Engineering, Kyungpook National University)
*
경북대학교전자전기컴퓨터학부(School of Electrical Engineering and Computer Science)
†