1. Introduction
Fog is a meteorological phenomenon in which small water droplets (or super-cooled water droplets or ice crystals) are suspended in the atmosphere with the
lower boundary touching the Earth’s surface with horizontal visibility of less than 1 km (KMA, 2009).
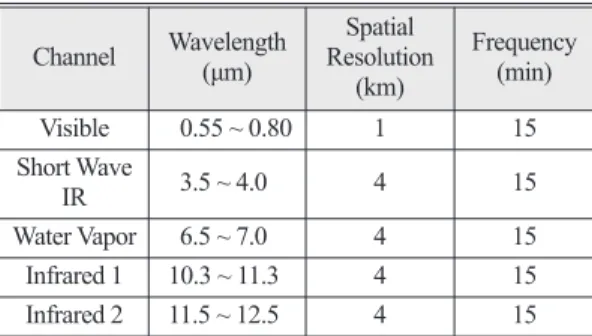
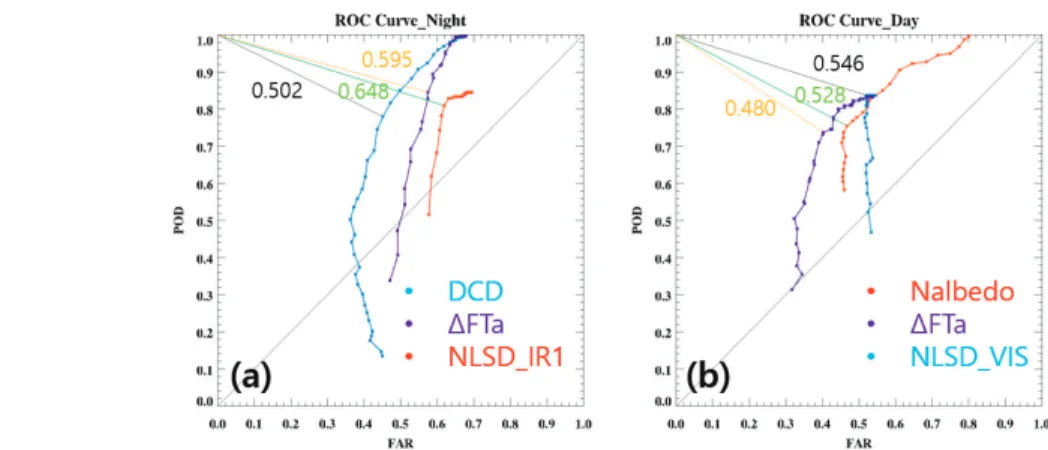
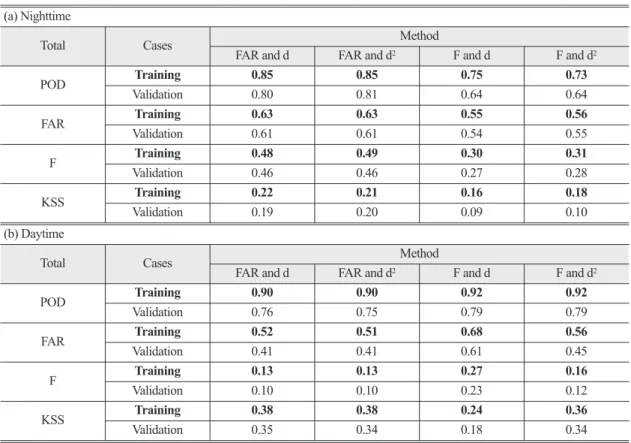
Fog occurring at close proximity to the Earth’s surface impairs visibility and, consequently, critically affects most transportation, such as automobiles, ships, and Abstract : We developed fog detection algorithm (KNU_FDA) based on the optical and textural properties of fog using satellite (COMS) and ground observation data. The optical properties are dual channel difference (DCD: BT3.7 - BT11) and albedo, and the textural properties are normalized local standard deviation of IR1 and visible channels. Temperature difference between air temperature and BT11 is applied to discriminate the fog from other clouds. Fog detection is performed according to the solar zenith angle of pixel because of the different availability of satellite data: day, night and dawn/dusk. Post-processing is also performed to increase the probability of detection (POD), in particular, at the edge of main fog area. The fog probability is calculated by the weighted sum of threshold tests. The initial threshold and weighting values are optimized using sensitivity tests for the varying threshold values using receiver operating characteristic analysis. The validation results with ground visibility data for the validation cases showed that the performance of KNU_FDA show relatively consistent detection skills but it clearly depends on the fog types and time of day. The average POD and FAR (False Alarm Ratio) for the training and validation cases are ranged from 0.76 to 0.90 and from 0.41 to 0.63, respectively. In general, the performance is relatively good for the fog without high cloud and strong fog but that is significantly decreased for the weak fog. In order to improve the detection skills and stability, optimization of threshold and weighting values are needed through the various training cases.
Key Words : Fog, detection, optical and textual properties, visibility meter, COMS
Received July 31, 2017; Revised August 4, 2017; Accepted August 9, 2017.
†