실외 자율 로봇 주행을 위한 센서 퓨전 시스템 구현
이승환 † ·이헌철·이범희
Implementation of a sensor fusion system for autonomous guided robot navigation in outdoor environments
Seung H. Lee † , Heon C. Lee, and Beom H. Lee
Abstract
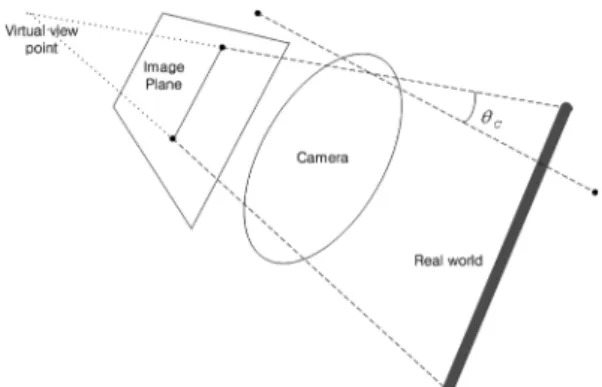
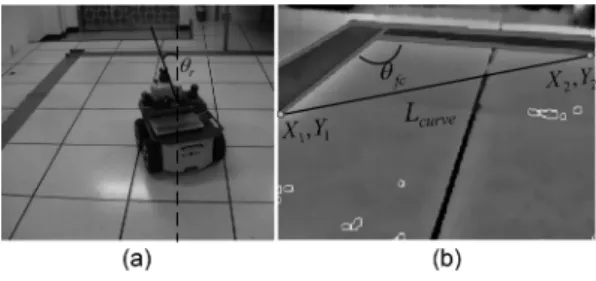
Autonomous guided robot navigation which consists of following unknown paths and avoiding unknown obstacles has been a fundamental technique for unmanned robots in outdoor environments. The unknown path following requires techniques such as path recognition, path planning, and robot pose estimation. In this paper, we propose a novel sensor fusion system for autonomous guided robot navigation in outdoor environments. The proposed system consists of three monocular cameras and an array of nine infrared range sensors. The two cameras equipped on the robot’s right and left sides are used to recognize unknown paths and estimate relative robot pose on these paths through bayesian sensor fusion method, and the other camera equipped at the front of the robot is used to recognize abrupt curves and unknown obstacles.
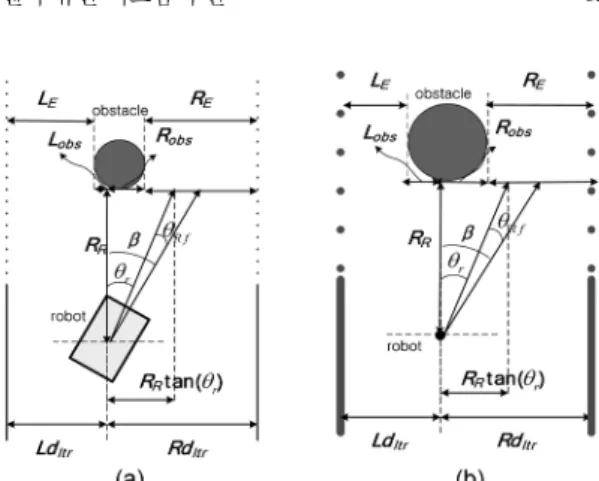
The infrared range sensor array is used to improve the robustness of obstacle avoidance. The forward camera and the infrared range sensor array are fused through rule-based method for obstacle avoidance. Experiments in outdoor environments show the mobile robot with the proposed sensor fusion system performed successfully real-time autonomous guided navigation.
Key Words : mobile robot, autonomous guided navigation, sensor fusion system, path following, obstacle avoidance
1. 서 론
최근 무인 자동차에 대한 관심의 증가로 해외에서
Association for Unmanned Vehicle Systems Interna- tional(AUVSI) 의해 Intelligent Ground Vehicle Compe-
tition(IGVC) 대회가 매년 열리고 있고 국내에서는 작년
부터 시작한 국제 로봇 실외 주행 대회 등이 개최되고 있다 . 이들 대회에서는 실외 도로와 같이 특정색을 가
진 라인 사이를 로봇의 경로로 두었고 , 로봇이 그 경로 상에서 목적지까지 자율적으로 주행함을 목적으로 한 다 . 유도 로봇 (guided robot) 은 이러한 환경에서 수행
되기 위한 로봇으로 경로 추종 (path following) 및 장애 물 회피 (obstacle avoidance) 기술이 크게 중요하다 . 먼
저 경로 추종을 위해서 많은 연구자들이 하나의 비전 센서만 이용한 방법을 제안하였다 . 하나의 비전센서만
사용함으로써 전체 시스템은 계산량이 줄어들고 시스템 설계가 용이하다는 강점이 생긴다 . 그래서 이들은 보다 정확한 영상처리를 수행하기 위해 노력하였다 . 하지만
전체 시스템이 비전 센서 하나에 의존하게 되므로 센서 에 의한 정보 획득의 실패는 로봇의 안정성 및 정확성 에 직접적인 영향을 줄 수 있다 . 이에 따라 다중 센서의
융합 (fusion) 을 이용한 방법도 제안되고 있다 . 융합 방법
에는 보통 규칙 기반 방법 (rule based method) [19] , 칼만 필터 (kalman filter) 를 이용한 방법 [18] , 베이시안 (baye- sian) 을 이용한 방법 [17] 이 있다 . 규칙 기반 방법은 간단 하고 여러 번의 실험을 토대로 얻어진 규칙을 따라 수 행됨으로 강력할 수 있지만 규칙작성에 많은 시간이 들어간다 . 칼만필터를 이용한 방법은 센서들로부터 얻 은 관측데이터를 토대로 예측 단계 (prediction) 와 갱신
단계 (update) 를 거쳐 가우시안 (gaussian) 분포를 가지는
상태 (state) 를 추정한다 . 이 방법은 널리 사용되고 있지
서울대학교전기컴퓨터공학부
(Department of Electrical Engineering, Seoul National University)
†