http://dx.doi.org/10.5369/JSST.2018.27.2.105 pISSN 1225-5475/eISSN 2093-7563
뇌졸중환자 보행보조로봇의 무릎관절 토크측정을 위한 토크센서 개발
박정현2 · 김갑순1,+
Development of Torque Sensor for Measurement of Knee Joint Torque of Walking Assist Robot in Stroke Patients
Jeong-Hyeon Park2 and Gab-Soon Kim1,+
Abstract
In this paper, a torque sensor is designed and fabricated to measure the knee joint torque of a walking assist robot for stroke patients.
The torque sensor sensing part was modeled on the link of the part connected to the knee joint motor. The torque capacity of the knee joint was calculated by simulation and the size of the torque sensor sensing part was designed using the finite element method. The torque sensor was fabricated by attaching a strain gauge to the sensing part. Characteristic experiments were conducted to characterize the torque sensor, and the torque sensor was calibrated to utilize it for the control of the walking assist robot. As a result of the char- acteristics test, the reproducibility error and the nonlinearity error of the torque sensor were 0.03% and 0.04%, respectively. Therefore, it is considered that the developed torque sensor can be used to measure the torque applied to the knee joint when walking on a walking assist robot.
Keywords: Strain-gage, Torque sensor, Rated output, Repeatability error, Non-linearity error
1. 서 론
다리환자는 대부분 사고, 뇌졸중 등에 의해 후천적으로 발생 하는 경우가 많고, 이 경우 재활치료에 의해 정상적으로 움직일 수 있을 정도로 회복될 수 있다. 재활치료는 재활전문 치료사가 재활운동을 시킴으로써 수행되거나 다양한 종류의 재활로봇을 이용하여 수행되고 있다. 편마비다리환자의 경우에는 착용용 보 행보조로봇을 착용하고, 재활훈련 및 일상생활을 위해 보행한다.
M. Wu[1]은 다리환자가 보행운동 중에 넘어지는 사고를 방 지하기 위해 벨트로 상부를 고정하고, 다리를 줄로 당기는 방식 으로 운동을 시키는 보행보조로봇을 개발하였다. 이 로봇은 다 리환자가 착용하고 보행을 수행하거나 평지 혹은 불규칙한 지
면을 걸으면서 운동할 수 없는 단점을 가지고 있다. M.M. Martins[2]
는 이동에 장애를 가진 사람들을 위해 보행보조로봇 기술에 대 해 기술하였고, 로봇의 보조시스템 및 보행보조 기술에 대해 기 술하였다. T. Wanga[3]은 3차원 가속도계와 자이로미터를 이용 하여 인간의 보행을 보조하는 로봇을 개발하였다. 이 로봇의 보 행 속도와 보폭 등을 이용하여 노인의 건강상태를 모니터링하 였다. H. Terada[4]는 비 원형기어 등을 이용하여 능동형 무릎 보조기구인 착용용 로봇을 개발하였고, 이 로봇은 무릎을 130°
까지 구부릴 수 있다. S. Kubota[5]는 착용용 보행보조로봇을 이 용하여 32명의 다리환자를 대상으로 1주일에 2회, 회당 90분간 8주동안 재활운동을 실시하는 실험을 실시하였다. M. Aach[6]
은 척추손상으로 발생된 다리환자의 보행능력을 향상시키는 하 이브리드 보행보조로봇을 개발하였고, 8명의 다리환자를 대상 으로 주당 5회, 90일 동안 재활훈련을 실시하였다. H. Watanabe[7]
은 하이브리드 보행보조로봇을 이용하여 10명의 급성 뇌졸중환 자의 보행 훈련을 1회 20분간씩, 주당 12회, 4주 동안 실시하였 다. N. Karavas[8]은 로봇의 링크를 종아리와 허벅지부분에 부 착하는 보행보조로봇을 개발하여 환자의 무릎관절을 재활훈련 하였다. 그리고 J.F. Zhang[9]는 무릎관절과 고관절을 재활훈련 할 수 있는 보행보조로봇을 개발하였고, V. Rajasekaran[10]은 하지관절을 보행궤적을 따라 훈련하는 제어를 연구하였으며, A.
Pennycott[11]은 보행보조로봇을 착용하고 보행훈련 중 자세제 어를 할 수 있도록 하였다.
1경상대학교 제어계측공학과(Department of Control & Instrumentation Engineering, ERI, Gyeongsang National Unversity)
405-504, Gyeongsang National University, 501 Jinju-daero, Jinju 660-701, Korea
2경상대학교 지능형메카트로닉스공학과(Department of Intelligent Mechatronics Engineering, Gyeongsang National Unversity)
+Corresponding author: [email protected] (Received: Jan. 9, 2018, Accepted: Mar. 17, 2018)
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://creativecommons.org/
licenses/bync/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Jeong-Hyeon Park and Gab-Soon Kim
지금까지 개발된 보행보조로봇은 환측 다리 혹은 로봇다리가 장해물 등과 접촉하거나 발바닥이 지면과 부딪혔을 때 감지하 지 못하고, 이때 발생되는 각 관절에 부착된 모터의 과부하(최 대 토크)를 측정하지 못하여 모터 드라이브의 동작 정지 등이 발생하는 단점을 가지고 있다. 이로 인해 불규칙한 지면을 걷거 나 계단 등을 오를 때 보행보조로봇의 부정확한 제어 및 각 관 절모터가 정지되는 문제로 넘어지는 등의 사고가 발생될 수 있 다. 이와 같은 문제점을 해결하기 위해서는 보행보조로봇의 발 바닥, 종아리 링크, 사람의 다리에 장해물이 접촉되었을 때 감 지할 수 있는 토크센서가 필요하다. 토크센서는 다양한 형태로 개발되었거나 상품화되어 판매되고 있고, 소형 다축 힘/토크센 서는 연구개발 중에 있다.
개발된 소형 다축 힘센서[12-16]는 직경이 80~120 mm 정도 로 소형이고, x, y, z방향의 힘과 토크를 측정할 수 있도록 다양 하게 개발되어 각종 지능시스템 및 자동화장치에 부착하여 힘 및 토크를 측정하는데 사용되고 있다. 이와 같은 센서들은 보행 보조로봇에 부착하게 되면 부피가 커질 뿐만 아니라 무게 증가 로 인해 보행 보조로봇의 각 관절 모터들의 용량이 커지므로 보 행보조로봇의 전체 무게 증가와 가격 증가가 발생되는 문제점 이 있다. 또한 H.S. Kim[17]과 J.H. Joung[18]은 보행보조로봇 의 허벅지 링크와 종아리 링크에 직접 3축 힘센서를 제작하여 보행 보조로봇을 착용하고 보행할 때 발에 접촉되는 장해물을 감지하여 로봇을 안전하게 제어할 수 있다. 그러나 이 센서들은 무릎관절에 가해지는 정확한 토크를 측정하지 못하여 모터의 과 부하로 인해 정지하는 문제는 해결할 수 없다. 그러므로 이와 같은 문제점을 해결하기 위해 보행보조로봇의 무릎관절 토크를 정확하게 측정할 수 있도록 종아리 링크 본체에 토크센서를 설 계 및 제작해야 한다.
따라서 본 논문에서는 뇌졸중환자가 사용할 수 있는 보행보 조로봇의 무릎관절 토크를 측정할 수 있는 토크센서를 링크에 직접 설계 및 제작하였다. 이를 위해 무릎관절 모터와 연결되는 부분의 링크에 토크센서 감지부를 모델링하였고, 시뮬레이션을 통해 무릎관절 토크용량을 계산하였으며, 유한요소법을 이용하 여 토크센서 감지부의 크기를 설계하였다. 그리고 토크센서 감 지부에 스트레인게이지를 부착하여 토크 센서를 제작하였고, 토 크센서의 특성을 파악하기 위한 특성 실험을 실시 하였으며, 보 행보조로봇의 제어에 활용하기 위해 토크센서의 교정을 실시하였다.
2. 무릎관절 토크센서 설계
2.1 무릎관절 토크센서의 보행보조로봇 적용 원리
Fig. 1 은 무릎관절 토크센서의 보행보조로봇 적용 원리를 나 타내고 있고, 이것은 보행보조로봇의 종아리 링크 이다. 종아 리 링크는 허벅지 링크와의 연결블록(connection block with
thin link), 무릎관절 토크센서(knee joint torque sensor), 무릎 관절 모터(knee joint motor), 발목 링크와의 연결블록(connection block with ankle link) 등으로 구성되었다. 허벅지 링크와의 연결블록은 무릎관절과 허벅지 링크를 고정하는 역할을 하고, 무릎관절 토크센서는 무릎관절에 가해지는 회전력을 측정하는 역할을 하며, 무릎관절 모터는 무릎관절을 회전시키는 역할을 한다. 그리고 발목 링크와의 연결블록은 종아리 링크와 발목 관절을 연결하는 역할을 한다. 무릎관절 토크센서는 다리환자 가 보행할 때 Fig. 1에 나타낸 것과 같이 다리환자의 다리와 발, 종아리 링크에 장해물 등이 접촉되어 외력이 가해질 때 토 크를 측정하여 로봇을 안전하게 제어하는데 사용될 수 있을 뿐만 아니라 무릎관절 모터의 정격토크를 초과하지 않도록 제 어하는데 활용될 수 있다.
2.2 무릎관절 회전력 시뮬레이션
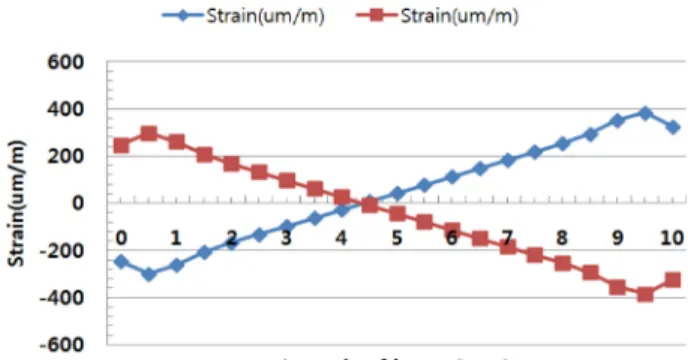
보행보조로봇의 종아리 링크에 부착되는 무릎관절 토크센서 를 설계하기 위해서는 다리환자가 보행보조로봇을 착용하고 보 행 시 무릎관절 이하의 무게를 회전시켜주는 회전력(토크)을 알 아야 한다. 그리고 이 토크는 무릎관절 모터의 정격용량을 결정 하는데도 사용된다. Fig. 2의 (a)는 다리환자가 보행보조로봇을 착용하고 보행 시 무릎관절에 가해지는 토크를 측정하기 위해 무릎관절 이하가 움직이는 모습을 나타낸 것이다. 사람이 보행 시 무릎관절 이하의 다리가 뒤로 움직이므로 보통 걸음을 기준 으로 최대 움직이는 거리를 45°로 보고 0°~45°까지 나타냈다.
Fig. 2 의 (b)는 (a)와 같이 움직일 때, 무릎관절의 모터가 가해 야 하는 토크를 나타낸 것이고, 무릎관절 각도가 9°일 때 3.504 Nm, 18° 일 때 6.92 5Nm, 27°일 때 10.177 Nm, 36°일 때 13.181 Nm, Fig. 1. Application principle of knee joint torque sensor in walking
assist robot.
45° 일 때 15.863 Nm이었으며, 각도가 클 수록 토크가 커졌다.
그러므로 무릎관절 모터와 무릎관절 토크센서의 정격용량은 보 행 시 시뮬레이션결과 45°일 때를 고려하여 각각의 정격토크를 결정하였다. 무릎관절 모터는 정격토크를 시뮬레이션 결과의 최 대토크인 약 16 Nm의 1.5배인 24 Nm로 결정하였다. 이와 같이 결정한 것은 무릎관절 모터의 정격용량이 커지면 이것의 무게 와 가격이 상승되기 때문이고, 안전율 1.5가 적합하다고 판단되 었기 때문이다.
무릎관절 토크센서의 정격용량의 시뮬레이션 결과의 최대토 크인 약 16 Nm의 2배인 32 Nm로 결정하였다. 이와 같이 결정 한 것은 토크센서를 제작하기 위한 감지부의 두께가 얇으면 외 부에 가해지는 충격 등에 취약할 수 있기 때문이고, 이로 인해 무릎관절 토크센서의 정격용량을 무릎관절 모터의 정격토크의 안전율보다 크게 결정하였다. 컴퓨터 시뮬레이션 할 때 입력한 상수는 설계한 종아리 링크의 무게를 0.560 kg, 발목 기구의 무 게를 0.460 kg를 대입하였고, 사람의 성인의 무릎 이하의 무게 (종아리와 발의 무게)를 5.000 kg(측정값을 기준으로 대략 추 정)을 적용하였으며, 발목 모터의 무게를 2 kg(실제 선정한 발 목 모터의 무게임)를 적용하였다.
2.3 무릎관절 토크센서의 구조 및 구조해석
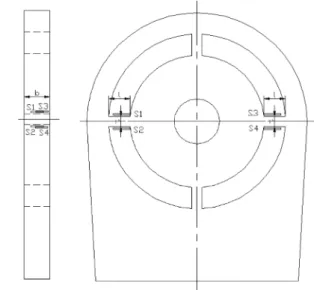
Fig. 3은 무릎관절 토크센서의 구조와 토크센서를 제작할 때 의 스트레인게이지 부착위치를 나타내고 있다. 토크센서는 평판 에 4개의 보(beam)가 90° 간격으로 위치할 수 있도록 십자형인 구조로 구성되고, 보는 토크센서의 감지부로 사용된다. 감지부 에는 4개의 스트레인게이지가 부착되고, 이들은 휘스톤브리지 를 구성하여 토크센서가 된다. 토크센서의 중심축의 가운데 부 분은 무릎관절 모터의 축과 고정되어 모터의 축이 회전하면 토 크센서에 회전력이 전달되고, 이 전달된 토크값은 토크센서에 의해 측정된다. 인장스트레인게이지는 S1과 S4이고 압축스트레 인게이지는 S2와 S3이다. 무릎관절 토크센서 감지부의 크기는 두께 t, 폭 b, 길이 l로 나타내고, 이것들은 토크센서의 설계 시 설계변수로 사용된다.
무릎관절 토크센서의 설계변수는 스트레인게이지 부착위치, 토크센서의 정격용량(정격토크), 정격변형률, 감지부의 두께, 폭, 길이이다. 4개의 스트레인게이지를 부착하고, 휘스톤브리지 를 구성하여 제작되는 토크센서의 정격변형률 식은 다음과 같 이 나타낼 수 있다[17].
(1) 여기서 은 토크센서의 정격변형률, 은 인장 스트레인 게 이지 (S1)의 변형률, 은 압축 스트레인게이지 의 변 형률(S2), 은 인장 스트레인게이지 (S4)의 변형률, 은 압축 스트레인게이지 (S3)의 변형률이다.
무릎관절 토크센서의 정격출력을 나타내는 식은 다음과 같이 쓸 수 있다[17].
(2) ε ε =
T1– ε
C1+ ε
T2– ε
C2ε ε
T1T
1ε
C1C
1ε
T2T
2ε
C2C
2E
oE
i--- 1
4 ---Kε
= Fig. 2. Simulation for measurement of torque of the knee joint.
Fig. 3. Structure of knee joint torque sensor and location of strain
gage.
Jeong-Hyeon Park and Gab-Soon Kim
여기서 는 토크센서의 입력전압, 는 토크센서의 출력전 압, K는 스트레인게이지의 상수(약 2.03), 는 식(2)로 부터 얻 은 정격변형률이다.
무릎관절 토크센서의 설계변수는 정격변형률을 1000 um/m, 정격출력을 0.5 mV/V, 정격용량을 32 Nm으로 결정하였다. 토크 센서의 정격용량은 시뮬레이션결과에 의해 결정된 것이고, 정격 용량과 출력은 일반적인 토크센서는 2.0 mV/V로 설계되나 본 논문의 토크센서는 다리환자의 불규칙한 보행 등을 고려하여 1/
4 배로 결정하였으며, 이것은 다축 힘센서의 정격출력과 동일하 다. 스트레인게이지 부착위치는 스트레인게이지의 크기 및 부착 정도를 고려하여 길이방향으로는 십자형으로 시작되는 부분으 로부터 2 mm, 폭방향으로는 중심선상으로 결정하였고, 토크센 서 감지부의 폭(b)은 12 mm, 감지부의 길이(l)는 10 mm로 결정 하였다. 토크센서의 두께(t)를 결정하기 위해 이들 설계변수를 유한요소해석 소프트웨어에 적용하여 구조해석을 실시하였다.
이때 재료상수는 토크센서의 재질이 알루미늄이므로 종탄성계 수를 210 GPa, 프와송의 비를 0.3를 입력하였고, 8절점 6면체를 선택하였다.
Fig. 4 는 유한요소해석 소프트웨어를 이용하여 무릎관절 토크 센서의 구조해석 결과를 나타내고 있고, 감지부의 길이방향의 격자크기는 0.5 mm이고, 폭방향의 격자크기는 1 mm이다. 토크 센서 감지부에 나타난 변형률은 Fig. 4에서 보는 것과 같이 스 트레인게이지의 부착위치 부분에 크게 발생하였고, 이것은 설계 시 예상했던 것과 일치하였다.
Fig. 5 는 무릎관절 토크센서의 감지부 변형률을 나타내고 있 고, 감지부 1개의 변형률 그래프가 변형률 0 um/m를 기준으 로 음과 양으로 나타난 것은 토크를 음의 방향(-)과 양의 방 향(+)로 정격용량을 가했기 때문이다. 보의 양끝지점에서 변 형률이 감소한 것은 유한요소해석 소프트웨어의 끝 효과오차 때문이다. 보의 길이가 10 mm인 지점이 토크센서 구조에서
십자형의 중심부분에 가까운 지점이고 0 mm인 지점이 멀리 떨어진 지점이다. 스트레인게이지 부착위치인 2 mm지점과 8 mm지점에서 각각 167 um/m와 253 um/m이었으므로 보의 길이 8 mm지점(십자형 중심부분에 가까운 지점)이 스트레인 게이지 부착위치로 선정되었다.
인장 스트레인게이지 과 의 변형률 과 는 각각 253 um/m 이었고, 압축 스트레인게이지 과 의 변형률 과 은 각각 -253 um/m이었다. 이 변형률들을 정격변형률식 (1) 에 대입한 결과 1012 um/m이었다. 설계 시 정격변형률 목표치 인 1000 um/m과 비교하면, 정격변형률 오차는 1.2%이었다. 그 리고 유한요소해석결과, 무릎관절 토크센서의 크기인 두께(t)는 4.80 mm, 폭(b)는 12 mm, 길이(l)은 10 mm이었다. 이와 같이 토 크센서의 감지부 두께를 0.01 mm 단위로 나타낸 것은 감지부 부분을 와이어커팅기로 가공하는데, 이 기계의 가공오차가 0.01 mm 단위 이내이기 때문이다.
3. 무릎관절 토크센서 제작 및 특성실험
Fig. 6 의 (a)는 제작된 무릎관절 토크센서의 사진을 나타낸 것 이고, (b)는 무릎관절 토크센서와 조립 된 종아리 링크를 나타 내고 있다. 무릎관절 토크센서는 Fig. 3에 나타낸 무릎관절 토 크센서의 게이지 부착 위치에 스트레인게이지(N2A-13-S1452- 350, 게이지 상수 2.03, 크기 3 mm × 5.2 mm)를 순간접촉제(M- bond 200)을 이용하여 부착하였다. 그리고 휘스톤 브리지를 구 성하여 제작하였다.
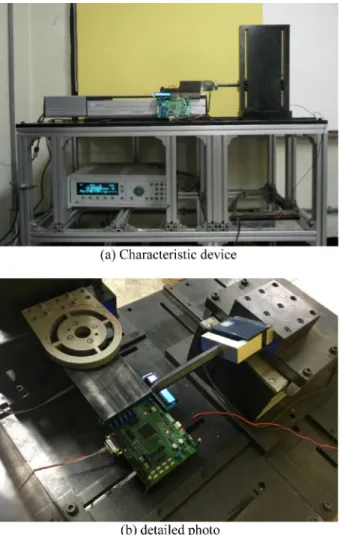
무릎관절 토크센서를 종아리 링크에 부착하여 사용하기 위해 서는 센서의 특성을 분석하고, 사용할 제어장치와 연결한 후 교 정을 실시해야 한다. Fig. 7의 (a)는 무릎관절 토크센서의 특성 실험 및 교정을 위한 실험장치(교정장치)[19]를 나타내고 있고, (b) 는 그것의 상세 사진을 나타내고 있다. 무릎관절 토크센서의 특성실험은 교정장치에 토크센서를 고정하고, 하중 0 Nm~27 Nm 까지는 3 Nm씩 증가시키고 마지막 10번째는 32Nm 등 총 10개 의 하중을 증가순으로 교정장치[19]를 이용하여 가했으며, 고성
E
iE
oε
T
1T
2ε
T1ε
T2C
1C
2ε
C1ε
C2Fig. 4. Structural analysis of the knee joint torque sensor.
Fig. 5. Strain of knee joint torque sensor.
능측정장치인 DMP40을 이용하여 측정하였다. 특성실험은 3회 반복하였고, 측정한 정격출력값들을 평균한 결과 0.4993 mV/V 이었다. 유한요소해석한 결과의 정격출력은 유한요소해석에 의 한 정격변형률 값 1012 um/m와 사용한 스트레인게이지의 상수 2.03 을 정격출력 식(2)에 대입하여 계산한 결과 0.5136 mV/V이 었다. 유한요소해석 결과를 기준으로 실험한 정격출력의 오차를 계산한 결과 -2.79%이내이었다. 그리고 무릎관절 토크센서의 재 현도오차와 비직선성오차를 계산한 결과는 각각 0.03%와 0.04%
이내이었다. 이 결과는 기존에 개발된 토크센서의 그것들과 유 사하므로 보행보조로봇의 종아리 링크에 부착하여 사용할 수 있 을 것으로 판단된다[12-18].
제작한 무릎관절 토크센서를 보행보조로봇에 부착하여 사용 하기 위해서는 무릎관절 토크센서를 보행보조로봇의 제어장치 와 연결하여 교정을 실시해야 한다. 무릎관절 토크센서의 교정
은 무부하토크(0 Nm)에서 보행보조로봇 제어장치의 영점조정기 를 이용하여 1500 mV가 출력되도록 조정하였고, 교정장치[19]
를 이용하여 토크센서에 센서의 정격용량인 32 Nm를 가하고, 보행보조로봇의 제어장치의 지시기에 증폭기를 이용하여 1280 mV 가 출력되도록 조정하였다. 즉, 보행보조로봇 제어장치에 46 mV 가 출력되면 1 Nm인 것이다. 이와 같이 보행보조로봇의 제어장 치를 무부하 토크에서 1500 mV가 되도록 조정한 것은 제어장 치의 출력범위가 0~3000 mV이고 토크센서가 양의 방향 토크와 음의 방향 토크가 출력되기 때문이다. 토크센서의 토크가 1 Nm 일 때 46 mV로 조정한 것은 제어장치의 양의방향 출력값이 최 대 1500 mV이고 토크센서의 정격용량이 32 Nm이므로 최대로 출력할 수 있도록 조정하였기 때문이다. 즉, 32 Nm의 토크는 1472 mV 이다.
무릎관절 토크센서의 교정은 하중 0 Nm~27 Nm까지는 3 Nm 씩 증가시키고 마지막 10번째는 32 Nm 등 총 10개의 하중을 증가순으로 교정장치[19]를 이용하여 가했고, 제어장치로 측정 하였다. 이와 같은 과정을 3회 실시하였고, 기 측정값들을 이용 하여 무릎관절 토크센서의 교정 재현도오차와 비직선성오차를 Fig. 6. Knee joint torque sensor manufactured
Fig. 7. Characteristic device for testing and calibrating the knee joint
torque sensor.
Jeong-Hyeon Park and Gab-Soon Kim
계산한 결과 각각 0.1%이내이었다. 종아리 링크에 부착하여 사 용되는 무릎관절 토크센서는 일반측정장치에 속하고, 일반측정 장치의 법정오차가 10%이내이므로 본 논문의 무릎관절 토크측 정장치는 보행로봇의 무릎관절에 가해지는 토크를 측정하는데 유용하게 사용될 수 있다고 판단된다.
4. 결 론
본 논문에서는 뇌졸중환자가 사용할 수 있는 보행보조로봇의 무릎관절 토크를 측정할 수 있는 토크센서를 링크에 설계 및 제 작하였다. 무릎관절 토크센서의 구조는 중심을 기준으로 십자형 보가 위치하도록 모델링되었다. 제작된 무릎관절 토크센서의 특 성실험결과, 토크센서의 재현도오차와 비직선성오차는 각각 0.03% 와 0.04%이내 이었고, 이것은 기존에 개발한 토크센서의 그것과 비슷하였다. 그리고 무릎관절 토크센서를 보행보조로봇 제어장치에 연결한 후 교정을 실시하였고, 그 결과 재현도오차 와 비직선성오차가 각각 0.1%이내이었다. 그러므로 본 논문에 서 개발한 토크센서는 종아리 링크와 고정되어 보행보조로봇의 무릎관절에 가해지는 회전력을 측정하는데 사용될 수 있다. 추 후 연구에서는 개발한 무릎관절 토크센서를 보행보조로봇에 고 정하여 다리환자의 보행 시 무릎관절에 가해지는 토크를 측정 하고, 이 값을 이용하여 다리가 장해물 등에 접촉하는 것을 감 지하고 무릎관절 모터의 과부하를 예측하여 모터의 정지 등을 미연에 방지하는 실험을 실시하는 것이다.
감사의 글
이 논문은 2017년도 정부(미래창조과학부) 의 재원으로 한국 연구재단의 기초연구사업 지원을 받아 수행된 연구임(No.
2015R1A2A2A01002952)
REFERENCES