3D JIG
모델의Kinematic
템플릿 생성 방법론고민석*, 곽종근*, 왕지남**, 박상철***
Kinematic Template Generation Methodology for 3D JIG Models
Min-Suk Ko*, Jong-Geun Kwak*, Gi-Nam Wang** and SangChul Park***
ABSTRACT
Proposed in the paper is a methodology to generate kinematic template for 3D JIG models. Recently, according to increase of the rate of automatic facility in manufacturing system, the 3D manufacturing and verification research and development have been issued. So, unlike in the past, moving 3D facili- ties are very various like JIGs, turn table, AS/RS worked in the automated manufacturing industry.
Because 3D mesh models are used in these kinds of 3D simulation, users have to define the kinematic information manually. This 3D mesh data doesn’t have parametric information and design history of the 3D model unlike the design level data. So, it is lighter than 3D design level data and more efficient to render on the 3D virtual manufacturing environment. But, when user wants to find a common axis located between the links, the parameter information of the model has to reconstruct for defining kine- matic construction. It takes a long time and very repetitive to define an axis and makes a joint using 3D mesh data and it is non-intuitive task for user. This paper proposed template model that provides kinematic information of the JIG. This model is kinds of a state diagram to describe a relation between links. So, this model can be used for a kinematic template to the JIG which has a same mechanism.
The template model has to be registered in the template library to use in the future, after user made the model of the specific type of the 3D JIG model.
Key words : JIG, Kinematics, Modeling, Template
1. 서 론
생산라인의자동화비율이높아지고, 디지털제조
기술이발전함에따라시뮬레이션을위한 3D 데이터
를구축할필요성이높아졌다. 현재국내자동차업계
에서는 3D CAD 모델을이용하여생산할차종에대
한설계를진행하고있으며, 생산라인을구성하는단
위설비에대한 3D CAD 모델은잘구축되어있는
상황이다[1-3]. 또한 3D CAD 데이터를기반으로작업
장(Cell) 단위에서는 3차원데이터구축및활용이활
성화되는추세이다. 과거에는주로프로토타입및 설계형상검토를목적으로 3D데이터를사용하였지
만, 현재는 설비 움직임 검증, 로봇OLP(Off-Line
Programming) 그리고라인단위 PLC 시뮬레이션영
역[4-6]까지 3D 데이터의활용이높아지고있다.
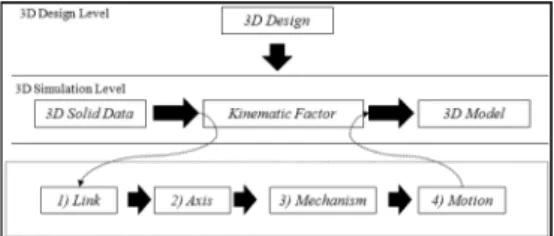
Fig. 1은자동차생산시스템의 3D 데이터의일반
적흐름을나타낸다. 가장먼저설비및차체설계를
목적으로 3D 데이터를작성한다. 이단계의 3D 모델
은정확한치수및공차를반영하여설계하기때문에 정확도가매우높고, 연혁이관리되어야하는데이터 이다. 본단계에서는설계레벨의검토를주로수행하 기때문에, 일반적으로기구학(Kinematic) 정보를다 루지않는다. 두번째 단계는 설계된 3D 데이터를
OLP 시뮬레이션용데이터로변환하여작업장을꾸미 는단계이다. 설비움직임검토및로봇경로작성을 위해사용하는본단계의 3D 데이터는설계용데이터 와는달리형상의정확도만요구되는데이터를사용 한다. 따라서일반적으로메쉬(Mesh) 데이터를사용 하여형상을표현하며, 기구학정의과정을통해움직 임검증을수행한다. 마지막으로 PLC 시뮬레이션을
*학생회원, 아주대학교산업공학과 **비회원, 아주대학교산업공학과
***교신저자, 종신회원, 아주대학교산업공학과 -논문투고일: 2010. 03. 03
-논문수정일: 2010. 05. 10 -심사완료일: 2010. 05. 11
위한 3D 시뮬레이션데이터는공장및라인단위시뮬
레이션을목적으로하기때문에기존의형상중불필
요한부분및중복형상삭제, 홀메움등의방법[7,8]
을통해가시화효율을향상시킨다. 그리고 OLP 단계 에서정의된 3D 모델을재사용하기때문에기구학 정보를재입력하지않아도된다.
자동차산업은자동화설비가많이투입되는대표 적산업이기때문에설계된 3D 데이터는위의세단
계를모두거치게된다. 현업관계자와의인터뷰를거
친결과, 위단계중가장많은시간이소요되는과정
은 3D 설비모델구동을위한기구학정의부분임을 알수있었다. 왜냐하면형상모델은데이터흐름에 따라자연스럽게진행되지만, 기구학정의정보는흐 름을따라진행할수없기때문에설계가변경될때 마다재정의해줘야하기때문이다. 이같은공수손 실은디지털작업장구축에있어서큰걸림돌이된다.
자동차산업이부흥함에따라하나의생산라인에서 여러차종을생산하는다차종생산시스템이보편화 되고있다. 이에따라차체를구성하는파트의종류가 다양해지고, 파트를고정하는지그(JIG) 및운반기의 종류가다양해지고있다. 특히자동차공장의지그형 상설계및제작에투입되는비용이전체제조시스템 구축비용의약 10-20%을차지할만큼큰영향을미
치고있다[9]. 지그의주된기능은로봇및디바이스가
작업하기전에대상파트를정확하게고정시켜주는 것이다. 따라서파트형상모양에따라지그의개수,
위치및모양이다양하게존재하며, 차체형상이변경
되면지그특성이재설계되는프로세스를갖는다. 지
그는치공구의큰범주에속하는자동화설비로써, 이
에대한기존연구는매우활발히이뤄졌다. Asada와
By는치공구와파트간의관계모델을만들기위해서
자코비안행렬을 사용했으며[10], Chou와 Chandru는 치공구분석과조성을위한 screw 이론을만들었다[11].
또한 Trappey는지그가갖는규제력과규제방향에
대한고려사항들을 time-variant stability 문제와함
께 논의 하였으며[12], 후에 Kan과 Rong에 의해 computer-aided fixture design validation system의 프 레임워크가제안되었다[13]. 이시스템프레임워크에서
지그 모델은 형상 모델(Geometry model)과 기구학
모델(Kinetic model)로분류되었으며, 이모델을이용
해 지그의 locator 분석, 공차분석그리고지그규
제력에대한분석을수행하였다. 국내에서는조병철 외 4인이실제현업의용접용지그설계를위한전용
CAD 시스템을개발하여, 기존프로세스의문제점을 획기적으로개선하는결과를얻었다[14]. 또한저자는
1단형 3D 지그모델의효율적인기구학정보입력을
위한연구를수행하였다[15]. 하지만이는 1단형이상 의다단형지그와핀이포함된복합형지그의적용에 한계점을갖고있다. 따라서본연구에서이한계점 을극복하고일반화시킬수있는방법론을제안하고 자한다.
본논문에서는 3D 시뮬레이션에사용되는자동화
설비데이터의기구학정보작성의효율성향상을위 해상태다이어그램으로표현되는기구학정보템플
릿모델인 KMS 모델을제안하였다. 특히본논문에
서는자동차조립공정의대표적인설비인지그를대 상으로방법론을설명한다.
본논문은다음과같이구성된다. 제 2장에서는시 뮬레이션을위한 3D 메쉬데이터를이용하여기구학 정보를작성하는기존프로세스및공수에대한분석 을말하며, 제 3장에서는메쉬데이터로부터기구학
정보추출을위한형상을인식하는방법과 KMS 모델
을이용한상태다이어그램과템플릿라이브러리를 설명하며, 제 4장에서는실제현업에서사용되는복
합형지그의 KMS 모델적용결과를말할것이고, 제
5장에서결론을말할것이다.
2. 메쉬 데이터를 이용한 기구학 정의 프로세스
Fig. 2는 3D 설계데이터를시뮬레이션용메쉬데
이터로변환하여기구학정보를입력하는일련의과 정을나타낸다. 설계단계의 3D 데이터는데이터연
혁및 parameter 정보를모두가지고있기때문에그
크기가매우크다. 따라서단일형상에대한설계검 증에대한용도로는적합하지만, 다수의설비데이터 를동시에가시화해야하는 3D시뮬레이션에사용하 기에는한계가있다. 따라서많은수의설비가구동되 는 3D시뮬레이션환경에서는메쉬데이터를사용해 야데이터용량이크게줄어들고, 가시화효과를높일 Fig. 1. 3D data flow in the automotive manufacturing
system.
수있다[7].
설비를표현하는 3D 형상이얻어지면, Fig. 2에제
시된다섯단계의기구학요소(kinematic factor)를입 력하는과정을거쳐야한다. 이과정은자동화하기 까다로운작업영역이기때문에많은공수투입이요 구된다. 저자는이같은문제를해결하고자지그의형 상및메커니즘특성을고려하여기구학정보를자동 으로입력하는방법에대한연구를수행하였다[15]. 하
지만핀이없는일부 1단형지그에적용한결과이기
때문에실제현업에서사용하는모든지그에적용하 는데한계를보였다. 따라서본연구에서는기존연구 의한계를극복할수있는일반화된방법론을제안하 고자한다. 즉, 핀을가지고있는 2단형이상의다단 형지그및일반설비에적용할수있는기구학정보 입력의템플릿모델을제안하고자한다.
본논문에서는 Fig. 2의다섯단계를통해정의되는 기구학정보입력공수를획기적으로줄이고, 기존연 구[15]보다일반적범주의설비에적용할수있는템
플릿모델링방법론인 KMS 모델을제안한다. 이는
메쉬로구성된링크간의관계를자동으로정의할수 있게하기때문에, 기구학정의에소요되는공수를크
게줄일수있다. 제안하는 KMS 상태모델은직관적
으로이해할수있으며, 구현의용의성과효율성을제 공하기때문에표준템플릿으로사용될수있다.
3. KMS 모델과 작성과정
본장에서는메쉬모델을이용한 KMS모델의정의
와템플릿작성을위한순차적프로세스를설명할것 이다.
3.1 KMS모델의정의
KMS 모델은 Kinematic Model State의 약자로써,
3D 설비모델의기구학정보를링크와노드의관계로
표현하는상태다이어그램이다. 원으로표기되는링 크와화살표로나타내지는노드를이용한상태다이어
그램모델은표현이쉽기때문에, 분야를넘어서널리
사용되고있다. 따라서사용자가템플릿으로사용하 기에거부감이없고, 트리구조의변환이용이하기때 문에구현에있어서도장점을갖는다. 일반적으로다 이어그램에서원으로표기되는링크는기구학적의미 의링크와는관계없다. 하지만본논문에서는다이어 그램의링크가곧기구학적의미의링크형상과 1:1로 연결되기때문에용어를혼용하지않고모두링크로 부르겠다.
Fig. 3은서로다른 3D모델의선형조인트관계를
하나의상태다이어그램으로표현한 KMS 모델이다.
상단의 3D모델은 모두 두 개의 링크(parent link,
child link)와하나의축으로구성된선형조인트를가
지고 있다. 이 선형 조인트 관계는 child link가
parent link를기반으로직선운동을할수있도록하는
기구학정보이다. 하단의상태다이어그램은이관계 를링크와노드로표현한것으로써, 화살표가출발하 는 parent link를기준으로 child link의조인트가선
형축(P)을기준으로연결되어있음을말하고있다.
다이어그램의링크에는 3D모델의링크이름이쓰여
지며, 노드에는조인트축의특성(선형(P)) 또는회전
(R) )이표기된다. 본논문에서는이러한기구학정보
표현을위한상태다이어그램을 KMS 모델이라명한
다. 이렇게정의된 KMS 모델이일반적인 3D 모델의
기구학입력과정에비해갖는장점은다음과같다.
1) 구현및표현의용이성
조인트정의에있어서링크간 상하관계는분명히 명시되어야한다. 이는사람이직관적으로이해할수 Fig. 2. Defining process of the 3D model kinematics.
Fig. 3. Links and a node to describe a joint relation.
있을뿐아니라, 구현측면에서도모호성을줄이는효
과를갖는다. 일반적으로조인트를구성하기위한링 크, 축, 조인트관계는트리구조를이용하는데, KMS
모델을통해정의된조인트관계는트리구조로쉽게 변환이가능하기때문에구현측면에서용이하다.
2) 템플릿화의용이성
다이어그램으로표현된링크간조인트정보는같은 기구학적관계를갖는다른모델에쉽게적용할수있 다. Fig. 3의두 3D모델은서로다른형상을갖지만,
선형조인트라는같은기구학정보를갖는다. 즉, 3D
모델의형상정보가서로다를지라도, 서로같은기구 학정보를사용하고있는경우가많기때문에템플릿 화가가능하다.
KMS 모델에서입력되는요소는링크및노드의정
보이다. 특히, 노드정보에따라선형조인트혹은회
전조인트로구분되기때문에, 링크사이를이어주는
축에대한정보를추출하여노드에표기하는것이매 우중요하다.
3.2 KMS모델작성프로세스
본논문에서는 KMS 모델을이용한지그의기구학 템플릿생성을말하고있다. 따라서다른설비들과구 분되는지그의기구학적특성을토대로링크특성치 를사전에정의하고자한다.
지그는일반적으로실린더를기준한피스톤의상하 운동을통해얻어지는공압을이용해서파트를규제
하거나용접하는작업을한다. Fig. 4는지그를구성
하는형상모델과 기구학모델을 나타낸다. 여기서
Input link와 Couple link는각각공압을생성하는피 스톤과실린더이다. 이두개의링크는다른링크들과
는구분될수있다. 왜냐하면, 지그모델을구성함에
있어서이실린더와피스톤형상은일정한규격을갖 는표준품(standard part)으로관리되기때문이다. 따라 서지그 3D모델을구성하는링크정보가입력되었을 때, 표준품링크의구분이가능하다. 이는조병철외
4인이제안한연구[14]의 “Standard Part Library”를구 성하는파트와같은의미를가지며, 현업에서수행하 는지그모델링프로세스에실제적용함에있어서문 제되지않는다. 본논문에서는지그를구성하는가장 대표적인표준품인 “피스톤, 실린더, 핀”의링크가구 분될수있음을가정한다.
다음 9단계는메쉬로이루어진 3D 지그모델로부
터 KMS 모델을작성하는절차이다.
Step 1:단일지그설비를구성하는링크가 LNlink
개로나뉘어져있다. 지그 3D 모델에대하여링크정 보는사용자에의해서혹은, 사전정의에의해서구분 되어있다.
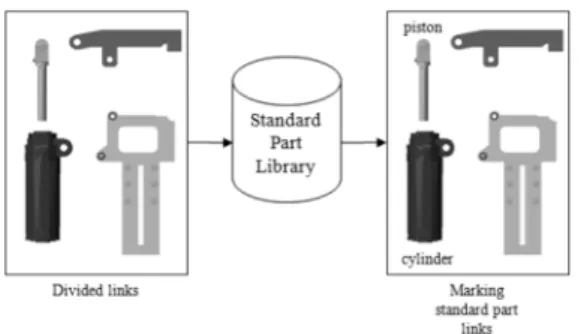
Step 2: 각링크에대하여표준품테스트를수행 한다. 앞에서언급하였듯이, 지그를구성하는링크들 중에는 표준품이 존재한다. 표준품의 범주{피스톤
(LNpiston), 실린더(LNcylinder), 핀(LNpin)}를정해놓았을
때, 각 링크는 Fig. 5와 같이 Standard Part Library
를통해자신이표준품인지여부를확인하고, 표준품
특성을표기한다. 이때 LNlink중에서표준품의특성
과 개수(LNstandard= LNpiston+ LNcylinder+ LNpin)가 정해
진다.
Step 3: 각링크가갖는실린더형상들의중심축을 추출하여리스트로만든다. 앞에서언급하였듯이서 로다른두개의링크가만드는조인트연결관계는하
나의공통축(common axis)으로규제된다. 이공통축
을찾기위해서는링크가갖고있는실린더형상의중 심축을찾아서, 다른링크와공유하는축이있는지를 검사해야한다. 따라서메쉬로구성된각링크가갖는 모든실린더형상을찾아서중심축의리스트를갖는 Fig. 4. Geometric model and kinematic model of a Jig.
Fig. 5. Marking standard part links.
자료구조를 만들어야 한다. 본 논문에서 말하는 실린 더 형상과 중심축은 Fig. 6과 같으며, 이에 대한 정의 를 설명하면 다음과 같다.
■ 실린더 형상(Cylindrical feature)
외각 선분(Boundary edge)를 이용해 만들어지는 직 사각형 모양의 전개도를 가지는 형상을 말한다.
(1)
(2)
(3) (4)
■ 중심축(Center axis)
외곽 선분을 구성하는 점(vertex)을 이용해 식 (1)의 초기 중심점을 구하고, 식 (2)를 이용해 각 점이 초기 중심점에서 이르는 평균 반지름(AvgR)를 계산한다.
그리고 식 (3)을 통해서 각 점에서 초기 중심점까지의 거리가 AvgR보다 큰 점들(Nrejected)을 제외시켜 정제된 점 집합(Nfiltered)를 얻는다. 만약 Nrejected의 개수가 0 이 라면, 이때의 중심점을 사용한다. 만약 그렇지 않다 면, 식 (4)를 이용해 다시 식 (1)부터의 과정을 반복
한다. 결과적으로 얻어진 두 중심점 사이의 벡터( ) 가 외각 선분이 생성하는 직교 벡터( )와 평행 조 건을 만족 시킬 때, 본 논문에서는 이 벡터( )를 실 린더 형상의 중심 축이라 정의한다.
Fig. 7은 하나의 링크에서 추출되는 실린더의 형상 과 각 실린더가 갖는 중심축을 표현한 것이다.
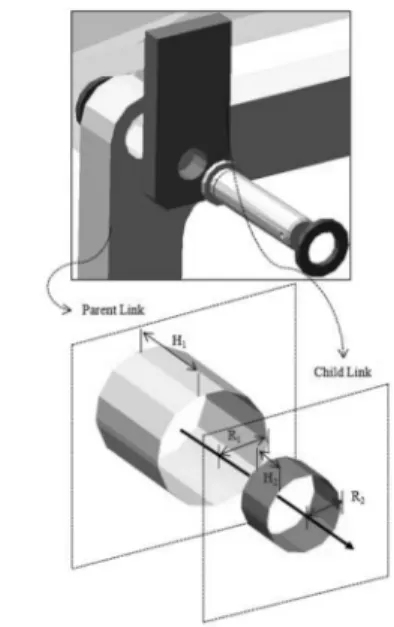
Step 4: 각 링크가 갖는 인접(adjacent) 링크 리스 트를 만든다. KMS 모델을 이용해서 조인트 관계를 정의하기 위해서는 임의의 링크와 인접하는 링크의 리스트를 알아야 한다. 따라서 각 링크는 모든 링크들 을 대상으로 자신이 가지고 있는 중심축과 같은 중심 축을 갖는 링크를 찾아서 자신의 인접 링크 리스트에 등록한다. Fig. 8은 두 개의 링크 사이에 존재하는 실 린더 형상과 이에 대한 공통의 중심축을 나타낸다.
Step 5: KMS 모델의 자료구조를 작성한다. Step 4까지 얻어진 정보를 바탕으로 리스트 및 링크 표준 품 특성, 그리고 인접 링크에 대한 정보로 이루어진 자료구조를 작성한다. Table 1은 Fig. 4의 1단형 지 그와 그에 대한 KMS 모델 자료구조를 나타낸다. 여 기서 Type 1은 실린더를 말하며, Type 2는 피스톤을 말한다.
Step 6: KMS 모델의 root link를 선택하고 루프를 구성한다. KMS 모델은 1단형 지그 뿐만 아니라 2단 형 이상의 다단형 지그에 대해서 일반적으로 사용될 수 있어야 하므로, root link링크 선택 및 루프 구성 과정에서 세 가지 가정이 필요하다.
Centerinit 1 Ninit
--- Vtx k( )
k 1= Ninit
⎝
∑
⎠⎜ ⎟
⎛ ⎞
=
AvgR 1 Ninit
--- Dist Center( init,Vtx k( ))
k 1= Ninit
⎝
∑
⎠⎜ ⎟
⎛ ⎞
=
Nfiltered=Ninit–Nrejected Centerinit 1
Nrejected
--- Vtx k( )
k 1= Nrejected
⎝
∑
⎠⎜ ⎟
⎛ ⎞
=
Ct Tri
Ct
Fig. 6. A cylindrical feature in a link.
Fig. 7. Making a list of cylindrical feature and axis in a link.
Fig. 7. A common axis between the two links.
■실린더링크우선
지그의메커니즘단계를결정짓는요소는공압실 린더를포함한루프의수이다. 예를들어서공압실린 더 5개를통해 4개의 R-P-R-R루프를형성하고 1개의 핀을가진지그는 5단형지그라명한다. 왜냐하면지
그를움직이는힘원천(power source)이실린더이기
때문이다. 따라서모델이진행할때, 실린더특성의링 크가다른링크보다우선선택됨을가정한다. 즉, 임
의의루프를구성하고다음인접링크로진행할때,
실린더특성링크로진출하는것을우선시한다.
■ Root link 선택
일반적으로조인트정보의상하관계는 Tree 구조 로이루어진다. 따라서다단형지그의경우루프간의 상하관계연결시가장상위루트를지정해주어야
여러개의루프가연결될수있다. root link로선택된
링크는 Fig. 8의 “L0”와 같이 KMS 모델상에서 겹
선으로표기된원을갖는다.
■ Closed loop의완성
실린더형상링크에서시작한 KMS 모델은루프를
구성하고다시초기의실린더형상으로회귀해야한 다. 왜냐하면링크를통한메커니즘관계를닫힌루프
(Closed loop)여야하기때문이다. Fig. 8의오른쪽모
델을보면, 마지막링크인 “L3”는인접링크를 “L0,
L2” 두개가지고있는데모두 marking이되어있는
상태이다. 이때, 루프구성과정에서마지막링크인
“L3”는루프 root link인 “L0”로회귀하여루프를닫 아야한다.
Step 7: 지그를구성하는모든링크가 marking 될
때까지 KMS 모델을확장시켜나간다. 임의의링크에
서자신의인접링크로진행할때, 다시자신에게회 귀하지않도록 marking한다. KMS 모델은 3D 지그
모델이 갖는 모든 링크(LNLink)가 marking되면더
이상진행하지않고, 종료한다.
Step 8: 완성된 KMS 모델을통해서지그 kinematic
모델을만든다. 저자외 4인은 4개의점을이용한지 그기구학모델자동생성방법에대한연구를수행하 였다[15]. Step 7에서만들어진 KMS 모델을이용하여 루프를구성하는링크간의공통축을루프가갖는특 정평면에투영하면 4개의점이생성된다. 이투영점
(projected point) 집합 이용하여지그의기구학모델
을자동생성할수있다.
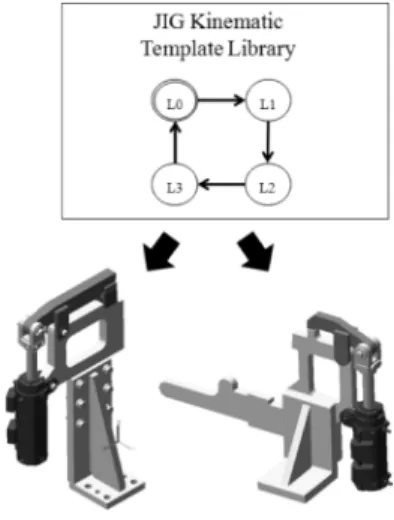
Step 9: KMS 모델을템플릿라이브러리에등록한
다. 만약임의의지그에기구학정보를입력시킬경
우, 같은 KMS 모델을갖는템플릿을찾아서링크간
의연결관계만규정시켜주면된다. Fig. 10은 1단형
지그에대한 KMS 모델이등록되어있는라이브러리
를나타내고있다. 하단의두 3D 지그모델은서로 다른형상모델을가지고있지만, 라이브러리에등록
된 1단형지그에대한 KMS 모델에모두적용시킬
수있다.
이상의 9단계를통해지그모델에대한기구학정
보를추출하여 KMS 모델을정의하는방법을설명하
였다. 또한작성된 KMS 모델을템플릿화하여다른
Table 1. Data structure of the 1step JIG
# Link Adjacent Link Standard Part
L0 L1, L3 X
L1 L0, L2 Type 1
L2 L1, L3 Type 2
L3 L0, L2 X
Fig. 9. The KMS model of a one step JIG.
Fig. 10. The KMS template library.
형상 정보를 갖는 지그에 대하여 적용할 수 있음을 보 였다.
4. 복합형 지그에 대한 적용
다수의 지그들 중에는 기본적으로 사용되는 1단 형 외에 2단 형 이상의 다단형 지그 및 핀이 함께 존재 하는 복합형 지그가 존재한다. 따라서 3D 지그 모델 이 입력 될 때마다 메커니즘과 움직임을 고려하여 기 구학 정보를 입력해야 한다.
Fig. 11은 4개의 R-P-R-R 루프와 1개의 핀을 가지 고 있는 복잡도가 매우 높은 복합형 지그의 예이다.
본 장에서는 이 복합형 지그의 기구학 모델을 생성 함 으로써 제안하는 KMS모델이 일반적 지그 기구학 정 의 템플릿으로 사용될 수 있음을 보이겠다.
Fig. 12는 5단 형 지그 모델을 총 14개의 링크로 분리한 것이다. 그림에서도 알 수 있듯이 이 모델은 총 4개의 피스톤 형상과 1개의 핀으로 구성되어 있는 모델로써 data structure는 Table 2와 같다. 본 모델에
서 사용되는 standard part는 {실린더, 피스톤, 핀} 세 종류로써 실린더가 Type 1, 피스톤이 Type 2 그리고 핀 이 Type 3으로 표기 되었다.
본 모델에서 Root link를 L2로 선택하여 3장에 제 시된 각 단계를 거쳤을 때, KMS 모델은 Fig. 13과 같이 확장된다.
Fig. 11. The 5-Step JIG.
Fig. 12. A set of links in the 3D multi step JIG model.
Table 2. Link properties in the multi step JIG model
# Link Adjacent link Standard part
L1 L2, L4 X
L2 L1, L3 Type 1
L3 L2, L4 Type 2
L4 L1, L3, L7, L5 X L5 L4, L6, L8, L10, L11,
L13, L14 X
L6 L5, L7 Type 2
L7 L4, L6 Type 1
L8 L5, L9 Type 1
L9 L8, L10 Type 2
L10 L5, L9 X
L11 L5, L12 Type 1
L12 L11, L13 Type 2
L13 L5, L12 X
L14 L5 Type 3
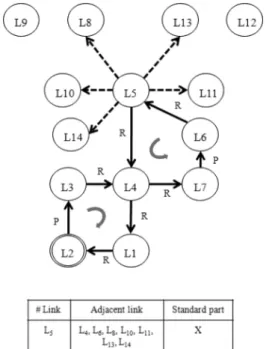
Fig. 13. The KMS model from L2 to L5.
Fig. 14를 통해 Root link로 L2가 선택되었을 때,
모델은 L5까지확장되어나감을알수있다. L5에서 다음링크로진행할수있는후보링크는점선으로표 기된 “L8, L10, L11, L13, L14”이다. 왜냐하면현재
L4와 L6는이미 marking되어루프를구성하였기때
문에인접링크리스트에서제외되었기때문이다. 이 렇게모델진행에있어서 선택이필요할 때, 3장의
Step 5에서언급한 “실린더형상의 링크(Type. 1)는 다른링크보다우선선택된다”는가정을이용하여다
음링크를선택한다. 5개링크중에서 Type. 1 특성
을갖는링크는 “L8, L11”이다. 이들중에서임의의
링크를선택하여루프를구성한후, 남은링크를다음 진행링크로선택한다.
Fig. 14는모든링크에대한노드연결이마쳐진상
태이다. 마지막노드연결은 L14과의연결이다. 왜냐 하면 L14는 Type. 3의핀링크이기때문에 Type. 1
의 L8과 L11의루프구성이끝난다음에연결된다.
본 KMS 모델을이용하여 5단형복합지그모델의
기구학모델을생성하면 Fig. 15와같다. 이는복합형
5단지그의형상모델과기구학모델을함께표현한것 으로써, 선으로표현된 4개의루프가 R-P-R-R 형의
slide-crank 메커니즘을나타내는것이다. 완성된모델
을동작하여각조인트에해당하는움직임을보이면
Fig. 16과같다.
5. 결 론
현재국내자동차업계에서는 3D CAD 모델을이 용하여생산할차종에대한설계를진행하고있으며,
생산라인을구성하는단위설비에대한 3D CAD 모 델을전사적차원에서관리, 운영하고있다. 하지만
OLP를위한 3D시뮬레이션단계에서는설계단계와
는달리, 메쉬구조로이루어진 3D 데이터를사용한
다. 따라서설비구동을위해기구학정보를입력할
때, 이에필요한 parameter 정보를직접입력해서생
성해야한다. 예를들어회전축생성을위해원의중
심점을얻기위해서는, 공간상의하나의평면을규제
하고, 3개의점을입력해야한다. 3D 데이터를이용한
OLP 및 PLC 시뮬레이션의범위가확대됨에따라
이같은기구학정보입력에투입되는시간은데이터 준비에소요되는공수손실에크게작용하고있다. 본 Fig. 14. The KMS model of the multi step JIG.
Fig. 15.The kinematic model and geometry model of the multi step JIG.
Fig. 16. The joint poses of the multi step JIG.