학 술 논 문
197
가상 운전 시뮬레이터를 이용한 족동 조향 시스템의 운전 성능 평가
송정헌·김용철
대구대학교 재활공학과
Driving Performance Evaluation Using Foot Operated Steering System in the Virtual Driving Simulator
Jeongheon Song and Yongchul Kim
Daegu University, Rehabilitation Science and Technology
(Manuscript received 20 July 2017 ; revised 16 August 2017 ; accepted 18 August 2017)
Abstract: The aim of this study was to evaluate driving performance of normal subjects for controlling the steering wheel by using foot operated steering devices in the driving simulator. Many people with complete bilateral loss or loss of use of upper limbs but with normal lower limbs are frequently left without use and/ or control of their hands, arms, or the upper extremities of their bodies. As a result, persons disabled in this manner have problems in oper- ation an automobile because they cannot grasp and manipulate a conventional steering wheel. Therefore, if foot oper- ated steering devices are used for controlling the vehicle on in people with disabilities, the disabled people could improve their community mobility by driving a car safely. Ten normal subjects were involved in this research to eval- uate steering performance by using three types of steering devices(conventional steering wheel, pedal type foot steering, circular type foot steering) in driving simulator. STISim Drive 3 program was used for testing the driving performance in two road scenarios: straight road and curved road at low and high speed of vehicle (40 km/h and 80 km/h). This study used two-way ANOVA to compare the influences of two factors(type of foot steering device and road scenario) in the three dependent variables of steering performance(standard deviation of lateral position, the lateral position of vehicle and the number of line crossing). The average values of the three dependent vari- ables(standard deviation of lateral position, lateral position and the number of line crossing) of driving performance were significantly smaller for conventional steering wheel or pedal type foot steering than circular type foot steering.
Key words: Foot Operated Steering, Driving Performance, Virtual Driving Simulator
I. 서 론
손이나 팔을 잃어 버렸거나, 소아마비, 뇌성 마비, 관절염 및 기타 질병에 시달린 많은 사람들은 손이나 팔 또는 상지 를 사용하거나 통제하는데 어려움을 갖게 된다. 2014년도 장애인 실태조사 통계자료[1]에 의하면 우리나라의 경우 지 체장애인과 뇌병변 장애인 중에서 약 6만여명이 상지의 양
쪽 장애를 갖고 있는 것으로 나타났으며, 이는 등록된 언어 장애인 전체의 약 50%에 해당하는 것으로 많은 사람들이 식사하기, 옷 입기, 글쓰기, 물건 움직이기, 세수하기 등과 같 은 상지를 사용하는 일상생활에 많은 어려움을 갖게 된다.
특히, 양손을 이용한 차량의 운전과 관련하여 일반적으로 기 존의 스티어링 휠을 손으로 붙잡고 조작 할 수 없기 때문에 기존의 차량을 운전할 수 없게 된다. 이와 같은 경우는 손 을 사용할 수 없기 때문에 왼쪽 발을 이용해서 조향을 제어 하고, 오른쪽 발을 이용해서 가속 및 제동 페달을 조작할 수 있는 발로 조향하기위한 족동 조향 시스템(Foot steering system) 이 필요하게 된다[2].
외국의 경우는 운전면허 시험에 합격하기 위해서 필요한 여러가지 운전 능력 중에서 조향 성능은 가장 중요한 기능 Corresponding Author : Yongchul Kim
Department of Rehabilitation Science and Technology, Daegu University, Daegudaero 201, Jilyang, Gyeongsan, Gyeongbuk 38453, Korea
TEL: +82-53-850-4342 (+82-10-9686-4240)
E-mail: [email protected]
198
중의 하나이기 때문에[3], 양팔의 기능이 손상된 운전자가 왼쪽 발을 이용해서 조향이 가능하도록 다양한 편의를 제공 해 주고 있다[4-11]. 1965년 독일의 Franz에 의해서 개발 된 Franz system이 대표적이며, 후 1977년 미국에 프란 츠 시스템이 소개되고, 1981년 일본의 Honda를 통해서 프 란츠 시스템이 일본에서 처음 소개되어, 족동 조향 차량을 이용한 운전면허 취득이 가능하도록 법이 개정되고, 1982 년 Honda 차량을 족동 조향 시스템으로 개조하여 운전면 허 취득자가 나오게 된다[4,10-11]. 미국의 경우 1958년 David Kope 에 의해 개발된 회전 원판형 형태의 조향 시스 템이 대표적이며[2], 현재는 미국의 Driver-Master, 일본의 Honda, 독일의 Paravan, 호주의 PME Auto Conversion 회사 등에서 설계 및 제작을 하고 있으며, 판매 딜러를 통 해서 양팔의 기능이 손상된 경우에 운전이 가능하도록 차량 에 대한 개조가 이루어지고 있다.
족동 조향 시스템의 기본 구성 및 동작 원리를 살펴보면, 발로 조작할 수 있는 입력 장치와 차량의 스티어링 휠을 회 전 시키기 위한 기어 및 체인 등으로 구성된 메커니즘으로 이루어져 있다. 입력장치의 경우 자전거의 페달과 같이 동 작하는 페달형 족동 조향 장치와 원판을 발로 동작하는 원 판형 족동 조향 장치가 가장 많이 사용되고 있다. 페달형 족 동 조향 장치의 경우 독일에서 개발된 프란츠 시스템이 대 표적이며, 페달은 기어 장치를 통해 일반 조향시스템에 연 결되어 있으며 왼쪽 발을 이용해서 정방향으로 페달링을 하 면 차량이 우회전하고, 역방향으로 페달링을 하면 차량이 좌 회전하도록 구성되어 있다. 자전거 페달을 동작하는 원리가 적용되기 때문에 가장 자연스러운 움직임을 이용할 수 있다 는 장점이 있다. 원판형 족동 조향 시스템의 경우는 차량의 바닥 면에 차량의 스티어링 휠과 동일한 방향으로 회전하는 원판을 설치하고, 그 위에 발판을 만들어 발을 왼쪽으로 돌 리면 차량이 좌회전하고, 발을 오른쪽으로 돌리면 차량이 우 회전하도록 구성되어 있다. 실제 차량의 스티어링 휠의 움 직임과 동일한 방향으로 발을 이용해서 동작 할 수 있다는 것이 특징이다. 이때 페달형 및 원판형 족동조향 장치 모두 오른쪽 발을 이용해서 브레이크와 가속 페달을 동작한다. 또 한 발을 이용해서 조향을 하는 경우는 차량의 다른 조작 장 치들을 손을 이용해서 동작할 수가 없기 때문에 무릎, 어깨 또는 머리에 의해서 조작될 수 있는 장치를 사용하게 된다 [4,5].
우리나라의 경우 2001년 족동 조향 차량을 이용한 운전 면허 취득이 허용되고, 이후 족동 조향 장치를 장착한 차량 을 이용하여 운전면허 시험에 응시하여 국내에서 최초로 운 전면허를 취득하게 된다. 송파 구청의 경우 2002년 일반 차 량을 개조해서 두발로 핸들을 조작하고 운전을 할 수 있는 장애인용 차량을 도입하여 운전면허 훈련을 진행해 오고 있
으며, 또한 국립재활원의 경우 2011년부터 족동 조향 차량 을 제작하여 운전면허 훈련을 지원해 오고 있다.
하지만, 안전 운전과 관련된 도로교통법 48조 제1항에[12]
의하면 “모든 차의 운전자는 조향 장치와 제동장치, 그 밖 의 장치를 정확하게 조작”해야 하기 때문에, 운전자들이 익 혀야 하는 가장 중요한 운전 기술은 속도를 제어하고, 원하 는 방향으로 조향을 하고, 차선을 유지하는 것과 같이 차량 을 물리적으로 제어하는 기술이다[13]. 따라서, 운전자들이 차량을 제어할 때 수행하는 조향 성능과 관련된 횡적 추적 (Lateral tracking) 과제[14]는 주로 차로의 중앙선에서부 터 차량의 중심위치까지의 거리를 나타내는 횡방향 위치, 차 량의 좌우 움직임의 변동폭을 나타내는 횡방향 위치의 표준 편차, 차선 이탈 횟수와 같은 차량의 차선 유지의 안전성을 분석하는 것이다[15-17]. 하지만, 장애인을 위한 족동 조향 장치에 대한 객관적인 조향 성능 평가와 관련된 연구가 그 동안 매우 부족했기 때문에 장애인이 비장애인과 같이 안전 하게 차량을 운전하기 위해서는 족동 조향 장치에 따른 조 향 성능에 대한 분석 연구가 필요한 실정이다[11,18].
따라서, 본 연구에서는 가상 운전 시뮬레이터에서 왼쪽 발 을 이용해서 조향 휠을 동작하는데 사용하는 족동 조향 장 치의 두가지 종류(페달형과 원판형 족동 조향 장치)에 따른 조향 성능을 분석하기 위하여 비장애인을 대상으로 총 10 명에 대해 횡적추적과제에 대한 분석을 수행하였다. 또한 운 전 성능의 경우 기존의 스티어링 휠을 사용하는 경우를 포 함하여 직선 및 곡선 도로에서의 차량의 횡방향 위치, 횡방 향위치의 표준편차 및 차선이탈 횟수를 비교 분석 하였다.
II. 연구 방법
1. 실험대상자 선정
기존의 스티어링 휠(Conventional steering wheel)과 페 달형 및 원판형 족동 조향 시스템(pedal type-foot steering, circular type-foot steering) 의 조향 성능을 평가하기 위하 여 운전 경험에 따라 운전하는 능력에 차이가 발생할 수 있 기 때문에 운전면허를 취득 한지 3년 이상 경과한 비장애인 대상자 10명을 선발하여 운전자에 의한 영향을 최소화하여 가상 운전 시뮬레이터에서 실험을 진행하였다. 피험자의 평 균 연령은 25.7세이며, 운전 경력은 평균 4.4 년으로, 실험 에 참가한 대상자의 특성은 표 1과 같다.
피험자 모두 기존의 스티어링 휠을 사용하는 데는 문제가
없었으며, 족동 조향 시스템을 처음 사용하기 때문에 착용
방법 및 조작방법을 설명하였고, 왼쪽 발에 족동 조향 시스
템 조작 부위를 장착하고, 오른쪽 발을 가속 및 제동 페달
에 올려놓은 상태로 피험자가 가장 편안한 자세로 작동할
수 있도록 자세를 조정하였다. 또한 피험자가 족동 조향 시
199
스템 조작 부위에 장착 후 발을 올려놓고 발 뒤꿈치를 바닥 에 놓은 상태에서 왼쪽 발이 가장 편안한 상태에서의 위치 를 차량 핸들에서의 초기값으로 설정하였다(그림 1). 피험자 모두 실험을 진행하기 전에 실험과 관련하여 진행 내용 및 도로 환경에 대해서 충분한 설명을 들었으며, 대상자의 동 의를 모두 받은 후 실험을 진행하였다.
2. 실험 장치 및 방법
(1) 가상 운전 시뮬레이터
페달형 및 원판형 족동 조향 시스템을 실제 차량에 설치 하여 성능을 평가하는 것은 많은 비용과 실제 도로에서 발 생할 수 있는 안전상의 어려움 있기 때문에, 가상 운전 시 뮬레이터에 족동 조향 장치를 설치하여 운전 성능을 평가하 고자 하였다. 가상 운전 시뮬레이터는 스티어링 휠(로지텍),
가속 및 제동 페달(로지텍), 운전석(카니발 차량 좌석), 제어 용 컴퓨터, 47 인치 LED 디스플레이 장치로 구성되어 있 으며(그림 2), STISIM Drive(System Technology Inc., USA) 소프트웨어를 이용하여 조향 장치의 성능을 평가하기 도로를 제작하여 주행 성능 평가를 진행하였다[17].
(2) 족동 조향 시스템
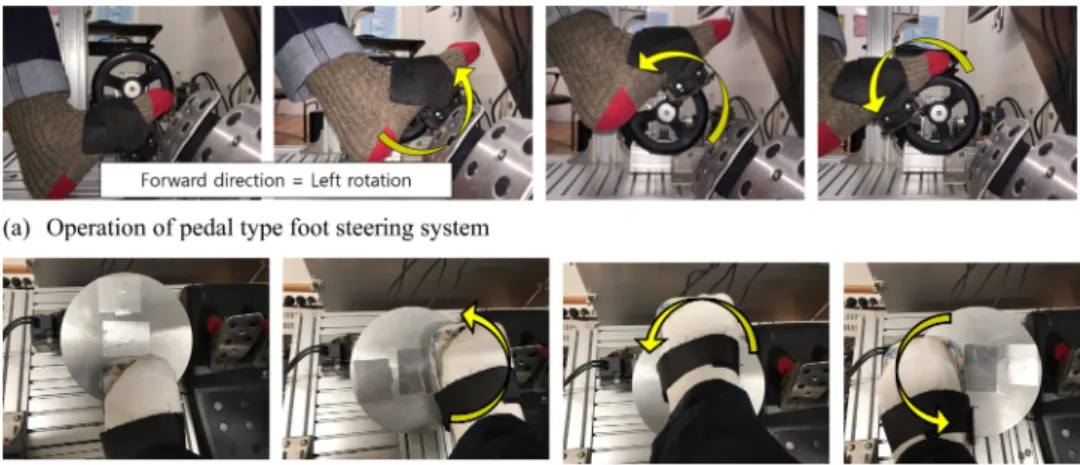
가장 많이 사용되는 족동 조향 시스템은 두가지 종류로, 첫번째는 자전거 페달 형태(Pedal type)로 왼쪽 발을 이용 해서 정방향으로 페달링을 하면 차량이 우회전하고, 역방향 으로 페달링을 하면 차량이 좌회전하도록 설계되어 있다(그 림 3(a)), 두번째는 원판 형태(Circle type)로 차량의 바닥 면에 차량의 스티어링 휠과 동일한 방향으로 회전하는 원판 을 설치하고, 그 위에 발판을 만들어 발을 왼쪽으로 돌리면 차량이 좌회전하고, 발을 오른쪽으로 돌리면 차량이 우회전 하도록 구성되어 있다(그림 3(b)). 두 장치 모두 기계식으로 연결되어 장치를 사용함에 있어 두 손으로 핸들을 회전시키 는 힘과 동일하게 발로 작동을 해야한다. 기계식으로 족동 조향 시스템을 적용하기 위해서는 차량마다 차량 내부의 공 간 유형이 다르고 운전석의 바닥과 차축의 높이 등이 다르 기 때문에 설치 및 대상자에게 적용하는데 시간과 비용이 많이 들고, 차량의 전장시스템의 발전으로 더 이상 기계적 인 구조변경으로 인한 족동 조향 시스템의 적용이 어렵다.
따라서, 본 연구에서 개발한 페달형 및 원판형 족동 조향 시스템은 회전축에서 측정한 엔코더 데이터를 PC로 전달하 여 스티어링 휠에 기어 장치로 연결된 모터를 제어할 수 있 는 전자식 제어 시스템으로 구성되어있다. 전자식 족동 조 향 시스템은 왼발로 페달이나 원판을 동작할 때 회전축에서 측정된 회전각 데이터를 이용하여 모터를 제어할 수 있는
그림 1. 족동 조향 시스템.Fig. 1. Foot operated steering system.
표 1. 실험 대상자 특성.
Table 1. Characteristics of subjects.
Subjects Gender Age (years)
Driving license
Driving Experience
(years)
height
A M 26 O 6 180
B M 28 O 8 180
C M 26 O 4 173
D M 26 O 5 170
E M 26 O 5 175
F M 26 O 4 182
G M 24 O 3 178
H M 27 O 3 176
I M 24 O 3 176
J M 24 O 3 175 그림 2. 족동 조향 시스템이 설치된 가상 운전 시뮬레이터.
Fig. 2. Virtual driving simulator with foot operated steering system.
200
알고리즘, 그리고 PC에서 모터를 제어 할 수 있는 모션 보 드와 모터로 구성되어 있다. 스티어링 휠을 제어할 수 있도 록 Ez-servo 모터와 모터 드라이버(FASTECH Co., Ltd) 를 사용하였다[19]. 그리고, 모터를 제어하기 위하여 내쇼날 인스트루먼트(National Instruments Co.)사의 Labview 2016프로그램을 사용하였으며, 모터와 PC를 연결하여 주는 모션 카드를 PC에 설치하였다. 페달 형태의 족동 조향 장 치의 경우 정방향으로 페달링을 하면 차량이 우회전하고, 역 방향으로 페달링을 하면 차량이 좌회전하게 된다. 회전 비 율은 기어의 비율에 따라 달라지지만, 1:1 비율로 작동하도 록 설계하였다. 원판 형태의 족동 조향 장치의 경우 차량의 핸들과 동일한 방향으로 차량이 회전을 하며, 회전 비율도 1:1 로 설계하였다. 페달 및 원판 형태의 족동 조향 장치 모 두 스트랩으로 발을 고정하여 발의 미끄러짐을 최소화 하였 다(그림 4).
(3) 직선 및 곡선 도로 시나리오
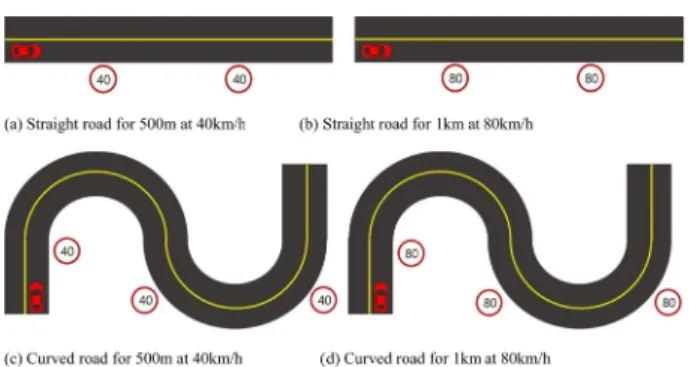
기존의 스티어링 휠과 페달형 및 원판형 족동 조향 시스 템의 조향 성능을 평가하기 위한 도로의 구성을 위하여, 선 행연구에서 개발한 STISIM Drive 운전 프로그램의 도로 에서 실험을 진행하였다[17]. 차량의 주행 속도를 저속 (40 km/h)과 고속(80 km/h)으로 설계한 직선과 곡선 구간 으로 총 4개의 도로를 제작하였으며, 3가지 조향 장치에 대 한 조향 성능만을 평가하기 위해서 실험 대상자가 가속 및 제동 페달을 조작하지 않아도 지정된 속도로 주행할 수 있 도록 사전에 설정하였다. 도로의 길이는 40 km/h 속도의 직 선 및 곡선 구간은 500 m(그림 5(a,c)), 80 km/h 속도의 직 선 및 곡선 구간은 1 km로 설정하였으며(그림 5(b,d)), 편 도 2차로로 제작하였다. 곡선 도로 주행시 대상자가 충분히 곡선 구간을 진입하기 위해서 직선 도로를 추가하였다.
차선에서 도로의 폭은 3.5 m, 차량의 폭은 1.6 m로 설정 하였고, 초기 차량의 횡방향 위치는 중앙선에서부터 차량의 중심위치까지의 거리인 1.75 m로 정의하였다(그림 6). 주행
그림 3. 2가지 종류의 족동조향시스템.Fig. 3. Two types of foot operated steering system in the vehicle.
그림 4. 족동조향 시스템 작동 모습.
Fig. 4. Operation of two types of foot steering system.
201 과 관련된 차량의 위치 관련 데이터는 0.1초 간격으로 측정
되도록 설정하였다.
(4) 실험 절차
기존의 스티어링 휠과 페달형 및 원판형 족동 조향 시스 템의 조향 성능을 평가하기 위하여 실험 전 대상자에게 3가 지 조향 장치(기존의 스티어링 휠, 페달형 및 원판형 족동 조향 장치)의 사용방법과 차량이 어느 정도 위치에 있어야 차로의 중앙을 주행하는지에 대하여 교육 및 훈련을 실시 하였다. 각각의 조향 장치에 대하여 도로의 유형별로 3회의 반복 실험을 진행하였으며, 실험 순서에 의한 영향을 최소 화하기 위하여 무작위로 조향 장치에 대한 실험 순서를 정 하였으며, 하나의 조향 장치에 대한 실험이 종료되면 10분 간의 휴식을 통해, 집중력과 피로를 회복할 수 있는 시간을 충분히 제공하여 실험을 진행하였다.
(5) 자료 분석
가상 운전 시뮬레이터에는 차량의 주행속도, 주행 거리, 차선과 차량중심간의 거리, 핸들의 조향 각도 등의 데이터 가 기록되며, MATLAB(MathWorks, USA) 프로그램을 이용해서 측정한 데이터를 분석하였다. 3가지 종류의 조향 장치(기존의 스티어링 휠, 페달형 및 원판형 족동 조향 장
치)를 이용하여 운전할 때 차량이 도로를 따라서 이동하는 움직임을 분석하기 위해서 중앙선에서부터 차량의 중심위치 까지의 횡 방향 위치에 대한 평균값을 분석하였으며, 차량 의 좌우 움직임에 대한 영향을 비교하기 위하여 횡 방향 위 치에 대한 표준편차 값을 분석하여 차량의 차선 유지의 안 전성을 비교하였다. 또한, 차량의 우측이나 좌측 차선으로의 이탈한 횟수를 분석하였다[15,17].
가상 운전 시뮬레이터에서 3가지 조향 장치(기존의 스티 어링 휠, 페달형 및 원판형 족동 조향 장치) 와 2가지 도로 유형(직선 도로 및 곡선 도로) 에 대한 저속(40 km/h) 및 고 속(80 km/h)에서의 차량의 조향 성능을 분석하기 위하여 통 계분석 소프트웨어인 SPSS v. 20.0(IBM Corp., USA) 을 이용하였다. 독립변수(조향 장치 와 도로 유형)에 대한 종속 변수인 조향 성능을 분석하기 위하여 Two-Way ANOVA 분산분석 방법을 사용하였고, p값이 0.05미만인 경우에 대 하여 통계학적으로 유의성이 있는 것으로 정의하였다. 그리 고, 분산분석을 통해서 그룹간의 유의성이 있는 경우에는 사 후 검정 방법인 Tukey test 방법을 사용하여 그룹들 상호 간의 통계학적인 유의성을 검증하고자 하였다[17].
III. 결 과
1. 저속 주행 시(40 km/h) 직선 도로 및 곡선 도로에서의 운 전 성능 비교 결과
저속 주행 시 직선 도로와 곡선 도로를 따라서 이동하는 경로를 분석하기 위해서 중앙선에서부터 차량의 중심위치까 지의 횡 방향 위치에 대한 평균값을 그림 7에 나타내었다.
저속 주행 시 직선 도로와 곡선도로에서 차량의 차선 유지 와 관련된 차량의 평균 횡 방향 위치에 대한 Two-way ANOVA 분석결과 3가지 조향 장치 요인에 대한 유의미한 차이가 나타나지 않았으며(p > 0.05), 도로 요인에 대해서도 유의미한 차이가 나타나지 않았다(p > 0.05).
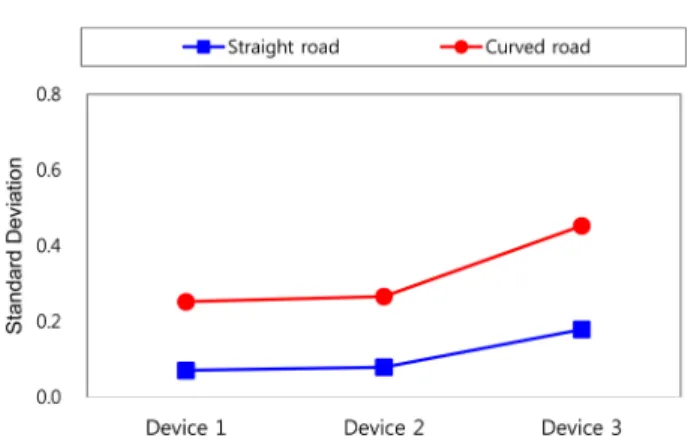
저속 주행 시 직선 도로와 곡선도로에서 평균 횡 방향 위 치와 함께 차량의 좌우 움직임에 대한 영향을 분석하기 위 하여 횡 방향 위치에 대한 표준편차 값을 그림 8에 나타내 었다. 저속 주행 시 직선 도로와 곡선도로에서 차량의 평균 위치에 대한 좌우 움직임의 변동을 나타내는 횡방향 위치에 대한 표준편차 값의 Two-way ANOVA 분석결과 3가지 조 향 장치 요인에 대한 유의미한 차이가 나타났으며(p < 0.01), Tukey 사후검정결과 기존의 스티어링 휠(Device 1)이 원 판 조향 장치(Device 3)보다 차선 유지를 위한 횡 방향 위 치 변화가 69.6% 감소하는 것으로 나타났으며(p < 0.01), 페 달 조향 장치(Device 2)가 원판 조향 장치(Device 3)보다 차선 유지를 위한 횡 방향 위치 변화가 46.7% 감소하는 것 으로 나타났고(p < 0.01), 기존의 스티어링 휠(Device 1)과
그림 5. 운전능력 평가를 위한 직선 및 곡선 도로 시나리오.Fig. 5. Test scenarios for driving performance on straight and curved road.
그림 6. 평가를 위한 도로 및 차량 관련 설계 변수.
Fig. 6. Design parameters of test road and vehicle.
202
페달 조향 장치(Device 2)는 차선 유지를 위한 횡 방향 위 치 변화 차이가 나타나지 않았다(p > 0.05). 또한 도로 요인 에 대해 직선 도로가 곡선 도로보다 차선 유지를 위한 횡 방향 위치 변화가 115.4% 감소한 것으로 유의미한 차이가 나타났다(p < 0.01).
저속 주행 시 직선 도로와 곡선도로에서 조향 성능에 대 한 영향을 분석하기 위해 차량의 좌측 및 우측 차선으로의 이탈 한 횟수에 대한 결과를 그림 9에 나타내었다. 저속 주 행 시 직선 도로와 곡선 도로에서 차량의 차선이탈 횟수에 대한 Two-way ANOVA 분석결과 3가지 조향 장치 요인에 대한 유의미한 차이가 나타났으며(p < 0.05), Tukey 사후 검정결과 기존의 스티어링 휠(Device 1)이 원판 조향 장치 (Device 3) 보다 평균 414.3% 차선 이탈 횟수가 감소하는 것으로 나타났고(p < 0.01), 페달 조향 장치(Device 2)가 원 판 조향 장치(Device 3)보다 평균 227.3% 차선 이탈 횟수 가 감소하는 것으로 나타났다(p < 0.01). 또한 도로 요인에
대해 직선 도로가 곡선도로보다 평균 차선 이탈 횟수가 520% 감소한 것으로 유의미한 차이가 나타났다(p < 0.01).
2. 고속 주행 시(80 km/h) 직선 도로 및 곡선 도로에서의 운 전 성능 비교 결과
고속 주행 시 직선 도로와 곡선 도로를 따라서 이동하는 경로를 분석하기 위해서 중앙선에서부터 차량의 중심위치까 지의 횡 방향 위치에 대한 평균값을 그림 10에 나타내었다.
고속 주행 시 직선 도로와 곡선 도로에서 차량의 차선 유지 와 관련된 차량의 평균 횡 방향 위치에 대한 Two-way ANOVA 분석결과 3가지 조향 장치 요인에 대한 유의미한 차이가 나타났으며(p < 0.05), Tukey 사후검정결과 페달 조 향 장치(Device 2)가 원판 조향 장치(Device 3)보다 차선 의 중앙(1.75 m)에 평균 0.95% 이내로 더 가깝게 주행하는 것으로 나타났다(p < 0.05). 도로 요인에 대해서는 유의미한 차이가 나타나지 않았다(p > 0.05).
고속 주행 시 직선 도로와 곡선 도로에서 평균 횡 방향
그림 7. 40 km/h 속도로 직선 및 곡선 도로를 주행 할 때의 횡 방향위치의 평균값.
Fig. 7. Mean lateral position on straight road and curved road at 40 km/h.
그림 8. 40 km/h 속도로 직선 및 곡선 도로를 주행 할 때의 평균 횡 방향 위치에 대한 표준편차.
Fig. 8. Standard deviation of lateral position on straight road and curved road at 40 km/h.
그림 10. 80 km/h속도로 곡선 도로를 주행 할 때의 평균 횡 방향 위치.
Fig. 10. Mean lateral position on curved road at 80 km/h.
그림 9. 40 km/h 속도로 직선 및 곡선 도로를 주행 할 때의 차선 이 탈 횟수.
Fig. 9. Number of line crossing on straight road and curved road at 40 km/h.
203
위치와 함께 차량의 좌우 움직임에 대한 영향을 분석하기 위하여 횡 방향 위치에 대한 표준편차 값을 그림 11에 나 타내었다. 고속 주행 시 직선 도로와 곡선 도로에서 차량의 평균 위치에 대한 좌우 움직임의 변동을 나타내는 횡방향 위치에 대한 표준편차 값의 Two-way ANOVA 분석결과 3 가지 조향 장치 요인에 대한 유의미한 차이가 나타났으며(p
< 0.01), Tukey 사후검정결과 기존의 스티어링 휠(Device 1)이 원판 조향 장치(Device 3)보다 차선 유지를 위한 횡 방 향 위치 변화가 95.9% 감소하는 것으로 나타났으며(p <
0.01), 페달 조향 장치(Device 2)가 원판 조향 장치(Device 3) 보다 차선 유지를 위한 횡 방향 위치 변화가 83.3% 감소 하는 것으로 나타났고(p < 0.01), 기존의 스티어링 휠(Device 1) 과 페달 조향 장치(Device2)는 차선 유지를 위한 횡 방향 위치 변화 차이가 나타나지 않았다. 또한 도로 요인에 대해 직선 도로가 곡선 도로보다 차선 유지를 위한 횡 방향 위치 변화가 196% 감소한 것으로 유의미한 차이가 나타났다
(p < 0.01).
고속 주행 시 직선 도로와 곡선 도로에서 조향 성능에 대 한 영향을 분석하기 위해 차량의 좌측 및 우측 차선으로의 이탈 한 횟수에 대한 결과를 그림 12에 나타내었다. 고속 주행 시 직선 도로와 곡선 도로에서 차량의 차선이탈 횟수 에 대한 Two-way ANOVA 분석결과 3가지 조향 장치 요 인에 대한 유의미한 차이가 나타났으며(p < 0.01), Tukey 사후검정결과 기존의 스티어링 휠(Device 1)이 원판 조향 장치(Device 3)보다 평균 528.6% 차선 이탈 횟수가 감소 하는 것으로 나타났고(p < 0.01), 페달 조향 장치(Device 2) 가 원판 조향 장치(Device 3)보다 평균 238.5% 차선 이탈 횟수가 감소하는 것으로 나타났다(p < 0.01). 또한 도로 요 인에 대해 직선 도로가 곡선 도로보다 평균 381.8% 차선 이탈 횟수가 감소하는 것으로 유의미한 차이가 나타났다 (p < 0.01).
IV. 결 론
본 연구에서는 가상 운전 시뮬레이터를 이용하여 양상지 장애인이 발을 이용하여 조향 휠을 작동하게 되는 페달형 족동 장치와 원판형 족동 장치를 기존의 스티어링 휠과 비 교함으로써 조향 성능을 객관적으로 평가하고자 하였다. 또 한 직선 도로와 곡선 도로와 같이 도로의 유형에 따른 조향 특성을 저속과 고속 주행에 대하여 분석하였으며, 다음과 같 은 3가지 조향 특성에 대한 결론을 얻을 수 있었다.
첫째, 차량의 좌우 움직임의 변동 폭을 나타내는 횡방향 위치에 대한 표준편차값을 살펴보면, 차량의 속도에 관계없 이 3가지 조향 장치 요인에 따라서 영향을 받는 것으로 나 타났다(p < 0.01). 특히, 사후 분석 결과 기존의 스티어링 휠 과 페달형 족동 조향 장치가 원판형 족동 조향 장치보다 좌 우 움직임의 변동이 각각 평균 82.8%와 65.0% 감소하여 안 정적으로 주행하는 것으로 확인되었다(p < 0.01). 그리고, 도 로 요인에 대해서도 속도에 관계없이 직선 도로가 곡선도로 보다 차선 유지를 위한 횡 방향 위치 변화가 평균 155.7%
감소하여, 직선 도로에서 곡선 도로 보다 안정적으로 주행 하는 것으로 나타났다(p < 0.01).
둘째, 차량이 우측이나 좌측 차선으로 이탈한 횟수를 살 펴보면, 차량의 속도에 관계없이 3가지 조향 장치 요인에 따 라서 영향을 받는 것으로 나타났다(p < 0.05). 또한, 사후 분 석 결과 기존의 스티어링 휠과 페달형 족동 조향 장치가 원 판형 족동 조향 장치보다 차선이탈 횟수가 각각 평균 471.5%
와 232.9% 감소하였다(p < 0.05). 그리고, 도로 요인에 대 해서도 속도에 관계없이 직선 도로가 곡선도로보다 차선 이 탈 횟수가 평균 540.9% 감소하여, 직선 도로에서 차선이탈 횟수가 상대적으로 감소하여 곡선 도로 보다 안정적으로 주
그림 11. 80 km/h 속도로 직선 및 곡선 도로를 주행 할 때의 평균횡 방향 위치에 대한 표준편차.
Fig. 11. Standard deviation of lateral position on straight road and curved road at 80 km/h.
그림 12. 80 km/h 속도로 직선 및 곡선 도로를 주행 할 때의 차선 이탈 횟수.
Fig. 12. Number of line crossing on straight road and curved road at 80 km/h.
204
행하는 것으로 나타났다(p < 0.01).
셋째, 차량이 도로를 따라서 움직이는 경로를 분석하기 위 해서 중앙선에서부터 차량의 중심위치까지의 횡방향 위치에 대한 평균값을 비교한 결과를 살펴보면, 고속 주행에서만 3 가지 조향 장치 요인에 따라서 영향을 받는 것으로 나타났 다(p < 0.05). 또한, 사후 분석 결과 페달형 족동 조향 장치 가 원판형 족동 조향 장치보다 차선의 중앙에서 주행하는 것으로 나타났다(p < 0.05). 그러나, 도로 요인에 대해서는 통계학적인 유의미한 차이가 나타나지 않았다.
본 연구를 통해서 기존의 스티어링 휠과 발을 이용하여 조향을 하는 페달형 족동 조향 장치와 원판형 족동 조향 장 치의 조향 특성을 비교하였으며, 페달형 족동 조향 장치의 경우 조향 성능에 있어서 기존의 스티어링 휠과의 통계학적 인 차이가 없는 것으로 나타났으며, 또한 속도에 관계없이 직선 및 곡선 도로 환경에서 원판형 족동조향장치보다 조향 성능이 좋은 것으로 확인 되었다. 본 연구에서는 속도를 일 정하게 유지하여 가속페달이나 제동 페달을 동시에 작동하 는 영향을 제외하고 조향 특성 만을 분석한 것으로, 향후 오 른쪽 발 을 동시에 사용해서 가속 및 제동을 수행하는 경우 에 있어서 양발의 상호 작용에 의한 인지 및 신체 움직임과 관련된 부분에 대한 연구가 추후 필요할 것으로 생각된다.
Reference
[1] S.H. Kim, National Survey on Persons with Disabilities 2014, Sejong-si, Korea: Institute for Health and Social Affairs, 2014, pp. 127-160.
[2] D. Kope, Vehicle steering device, U.S. Patent, 2,865,223, 1958.
[3] R.J. Koppa, Adaptive control requirements for the quadrip- aretic driver, Ph.D. Dissertation, Texas A&M University, Texas, 1979.
[4] E.F. Murphy, “Reflections on automotive adaptive equip- ment-an essay”, Bulletin of Prosthetics Research, vol. 16, no.
2, pp. 191-207, 1979.
[5] C.M. Haslegrave, “Car controls for physically handicapped drivers”, in Proc. 10th International Technical Conference on Experimental Safety Vehicles, Oxford, England, Jul. 1985, pp. 235-242.
[6] J.M. Pellerito, Driving Rehabilitation and community Mobil- ity: Principles and Practices, Missouri, USA: Mosby, 2006, pp. 239-253.
[7] Directive 2006/126/EC of the European Parliament and of the Council on Driving Licences, Official Journal of the European Union, 2006.
[8] J.A.A. Hunter, J. Vries, Y. Brown, J.B. Hartmann, A. Hek- stra, G. Vidmar, Handbook of Disabled Driver Assessment, Forum of Mobility Centres, 2009, pp. 205-224.
[9] M.J. McGuire, E.S. Davis, Driving and Community Mobility:
Occupational Therapy Strategies Across the Lifespan, Bethesda, USA: AOTA, 2012, pp. 279-319.
[10] Development of Honda’s Franz System; http://world.honda.
com/history/challenge/09_peopleandsociety/, 2017.
[11] Y. Murata, K. Yoshida, K. Suzuki, D. Takahashi, “Automo- bile Driving Interface Using Gesture Operations for Disabled People”, International Journal on Advances in Intelligent Systems, vol. 6, no. 3, pp. 329-341, 2013.
[12] Road Traffic Act, Article 48, 2011, http://law.go.kr.
[13] C.U. Do, H.S. Kim, K.W. Kim, S.B. Lee, H.J. Cho, Traffic Safety Engineering, Paju-si, Korea: Cheong Moon Gak Pub- lisher, 2013, pp. 113-116.
[14] C.D. Wickens, S.E. Gordon, Y. Liu, An Introduction to Human Factors Engineering, New York, USA: Addison Wesley Longman, 1997, pp. 514-516.
[15] B. Peters, “Driving performance and workload assessment of drivers with tetraplegia: an adaptation evaluation frame- work”, Journal of Rehabilitation Research and Develop- ment, vol. 38, no. 2, pp. 215-224, 2001.
[16] B. Peters, J. Ostlund, Joystick controlled driving for drivers with disabilities, Linkoping, Sweden: Swedish National Road and Transport Research Institute, 2005, pp. 39-43.
[17] J. Song, Y. Kim, “Influence of Four Types of Steering Assis- tive Devices on Driving Performance: Comparison of Normal and Disabled People with and without Driver’s License”, Journal of Biomedical Engineering Research, vol. 38, no. 1, pp. 32-42, 2017.
[18] D.O. Kim, K.M. Rhee, “A comparative study by types of foot steering devices through driver testing courses and the sur- vey study on the modification status of foot steering devices for persons with upper extremity disabilities”, Journal of Rehabilitation Research, vol. 14, no. 1, pp. 83-111, 2010.
[19] W. Jung, Y. Kim, “Development of smart driving system using iPod and its performance evaluation for people with severe physical disabilities in the driving simulator”, Journal of the Ergonomics Society of Korea, vol. 31, no. 5, pp. 637- 646, 2012.