전동휠체어의 다목적 활용을 위한 무한궤도형 기반의 프레임 응력 및 통합 모니터링 시스템
조경호*ㆍ정세훈**ㆍ박재성*ㆍ유승현***ㆍ심춘보****
A Frame Stress and Integration Monitoring System based on
Continuous Track Type for Multipurpose Application of Electric Wheelchair
Kyeong-Ho Jo*ㆍSe-Hoon Jung**ㆍJae-Sung Park*ㆍSeung-Hyun Yoo***ㆍChun-Bo Sim****
요 약
전동휠체어는 과거 장애인 및 노약자만 활용하는 장비로 인식되었지만, 최근 기능 및 형태의 변화를 통해 다양한 분야에서 다목적으로 활용되고 있다. 이에 본 논문에서는 다양한 분야와 환경에 적용될 수 있는 무한 궤도형 전동휠체어의 프로토타입과 이를 제어할 수 있는 통합 모니터링 시스템을 제안한다. 이를 위해 기존 휠체어와 비교하여 운행 시 안전성 향상을 위한 프레임 응력 설계와 안드로이드기반의 앱(App)을 이용하여 전동휠체어를 자유롭고 손쉽게 조작할 수 있는 편의성을 제공한다. 아울러 다량의 전동휠체어를 원격에서 모 니터링하고 제어할 수 있는 기능도 지원한다. 시스템 구현 및 성능평가 결과, 응력설계는 5번의 응력 해석을 통하여 존 미제스 응력 값이 정상범위에 해당하는 4.401%로 측정되었으며, 시스템의 제어를 위한 통신 부분에 대한 정확률도 98.75%로 측정되어 기존 휠체어와 비교하여 안전성 높은 것으로 입증되었다.
ABSTRACT
An electric wheelchair used to be utilized as a piece of equipment for the disabled and the elderly in the past, but the recent changes to its functions and forms have made it available across various fields and purposes. In this paper, we propose a continuous track type of electric wheelchair prototype to be used in various fields and environments and a monitoring system to control it. A frame stress design was applied to improve its stability during driving compared with the previous wheelchairs. In addition, we provide a convenience for free and easy operation of them using the App.
based on android. A monitoring system based on C# was also added to control a large number of electric wheelchairs.
As a result of the implementation and performance evaluation, the von Mises stress value was measured 4.401% within the normal range through five times of stress interpretations, and its accuracy of communication for system manipulation was recorded about 98.75%, which means that it has been proven to be safer than the previous wheelchairs.
키워드
Electric Wheelchair, Continuous Track Type, Frame Stress, Monitoring, Safety 전동 휠체어, 무한 궤도형, 프레임 응력, 모니터링, 안정성
* 순천대학교 멀티미디어공학과([email protected])
* 순천대학교 멀티미디어공학과([email protected])
** 영산대학교 연계전공학부([email protected])
*** (주)네모플랜([email protected])
**** 교신저자 : 순천대학교 정보통신·멀티미디어공학부 ㆍ접 수 일 : 2018. 09. 11
ㆍReceived : Sep. 11, 2018, Revised : Sep. 28, 2018, Accepted : Oct. 15, 2018 ㆍCorresponding Author : Chun-Bo Sim
Dept. of Computer Education, Sunchon National University, Email : [email protected]
http://dx.doi.org/10.13067/JKIECS.2018.13.5.1135
Ⅰ. 서 론
최근 세계적으로 기차나 자동차 등의 이동수단보다 퍼스널 모빌리티라고 불리는 개인용 소형 이동기기가 주목 받고 있으며, 각국의 대도시에서는 교통체증과 대기오염이 큰 문제가 되고 있는 가운데 퍼스널 모빌 리티가 그에 대한 대안으로 떠오르고 있다. 퍼스널 모 빌리티는 단거리 이동에 최적화된 소형 이동기기로 급격한 도시화로 인해 활용도가 매우 높아지는 추세 이며, 자동차의 대체재로 전망하고 있다[1]. 국도교통 부에서는 노약자, 임산부, 장애인 등의 교통약자 수가 2017년 약 1,367만 명에서 2021년에는 1,497만 명으로 증가하고 이들을 위한 주요 이동수단인 전동휠체어에 대한 수요도 지속적으로 증가할 것이라 예측하고 있 다[2].
그에 맞춰, 전동휠체어 관련 연구는 주행 및 제동 력 향상, 보도 턱과 계단의 오르내림, 전동휠체어 제 어 기술들이 주로 연구되고 있는 실정이다[3-9]. 주행 및 제동력 향상기술은 전동휠체어 작동 시 발생하는 낙상이나 슬립 현상을 방지하기 위해 주행 및 제동 안정성을 향상시키는 연구가 중점적으로 이루어졌으 며, 낙상이 발생하여 탑승자가 이탈하거나 지면에 충 돌하는 상황에서 탑승자를 보호하는 기술에 대한 연 구는 진행되지 않고 있다[3]. 보도 턱과 계단의 오르 내림에 관한 연구는 효율적이고 안정적으로 계단이나 불규칙지형을 주행할 수 있는 기술에 대한 연구가 진 행되고 있다[5]. 전동휠체어 제어 기술은 휠체어의 주 행 방향을 조작하는 조향부와 속도를 조정하는 모터 제어 부로 나눌 수 있다. 조향부의 경우 조이스틱에 중점을 두고 연구가 진행되고 있으며 조이스틱의 경 우 사용자의 신체적인 특성에 의해 조이스틱이 손에 맞지 않아 불편함을 느끼는 문제점이 있다[7].
이를 위해 본 논문에서는 전동휠체어 운행 시 안정 성 향상을 위한 응력설계와 조이스틱뿐만 아니라 스 마트폰으로 전동휠체어를 제어 할 수 있고, 전동휠체 어에 대한 전체적인 정보를 관리할 수 있는 IoT 기반 의 무한궤도형 전동휠체어와 전동휠체어 제어 및 통 합 모니터링 시스템을 제안한다. 제어 및 통합 모니터 링은 사용자가 모바일 단말기를 통해 직접 전동휠체 어를 제어 및 모니터링할 수 있는 안드로이드 기반의 앱(App.)과 C# 기반의 전동휠체어 이력 관리 프로그
램을 포함하고 있다[10]. 또한, 안드로이드 앱은 실시 간으로 전동휠체어에 부착된 센서, 배터리 및 모터에 대한 상태를 확인하고 웹서버에 전송하여 데이터베이 스에 저장할 수 있도록 설계한다. C# 기반의 전동휠 체어 이력관리 프로그램은 전동휠체어 모터 주변의 온·습도 등과 같은 환경정보를 그래프 형태로 시각화 하여 나타내고, 주행속도, 시간별 위치, 모터 부하량을 조회할 수 있다. 추가적으로 현재 운행 중인 전동휠체 어들의 실시간 위치를 조회할 수 있도록 구현한다.
본 논문의 구성은 다음과 같다. 2장에서는 전동휠 체어와 관련한 기존 연구에 대해서 소개하고, 3장에서 는 제안하는 전동휠체어 및 모니터링 시스템을 기술 한다. 4장에서는 제안하는 시스템의 구현결과 및 전동 휠체어 구동축의 응력설계와 통신 모듈의 정확성에 대한 성능평가를 제시한다. 마지막으로 5장에서는 결 론과 향후 연구 방향을 소개한다.
Ⅱ. 관련연구
기술이 발전하고 사용자의 요구사항이 다원화됨에 따라 전동휠체어의 연구도 다양한 분야와 융합해 활 발한 연구가 진행되고 있다. 먼저 전동휠체어 주행 시 발생하는 슬립현상을 분석하여 슬립현상으로 발생하 는 제어 불능 상태 및 경로 이탈에 대처 할 수 있는 슬립 제어기에 관한 연구를 제안했다. 이 연구에서 슬 립 제어기의 주요기능은 슬립 상태를 검출하는 기능 으로, 슬립 상태의 검출은 모터의 상태를 검출하는 것 으로, 6축 IMU 센서와 좌우 모터에 연결된 Encoder 를 통해 산출된 회전 각속도, 가속도의 비교를 통해 슬립을 산출하고 두 개의 슬립율을 합성하여 최종 슬 립율을 구한다. 산출된 최종 슬립율을 전동휠체어의 안정성 향상을 위해 사용하였다[3].
전동휠체어의 자율주행과 전동휠체어 제어앱이 사 용자에게 어떤 영향을 미치고, 어떠한 상태가 안전성 을 향상시키는지 제안하였다. 이 연구에서는 사용자가 실내에서 원하는 위치의 경로를 지정하여 자율주행 시스템을 설계하였다. 자율주행 시스템은 AGV(:
Automated Guided Vehicle) 마그네틱 선을 경로에 부착하여 전동휠체어의 HALL센서로 이를 인식하도 록 설계하였다. 장애물 감지를 위해 TOF(: Time of
Flight)을 이용하여 거리를 측정하고 발생된 초음파가 물체와 충돌해 반사되어 수신기로 들어오는 원리를 사용하였다. 스마트폰 앱의 자이로 센서로 주행 안정 성을 높였다[4].
신체적으로 제한된 교통약자들을 위한 전동휠체어 의 주요기술들을 기술하고 있으며, 첫째, 전동휠체어 에 형태의 보조 장치. 둘째, 탑승자의 무게 중심에 따 라 계단을 오르내릴 수 있고, 4바퀴가 모두 계단 위에 닿게 하여 안정성을 향상시킨 Up Stair방식. 셋째, 일 반 주행 시 4바퀴로 주행하다가 계단이나 보도 턱과 같은 돌출부위를 주행할 때는 체인벨트로 교체하고 경사의 변경에 균형을 자동으로 맞춰 안정성을 향상 시킨 탱크 방식에 대해 제안하였다. 이러한 기술들이 교통약자들이 전동휠체어를 이용해 계단이나 불규칙 지형을 주행할 수 있지만 무게와 부피 등 다양한 측 면을 고려했을 때 아직 실생활에 적용하기는 어려울 것으로 예측하였다[5].
전동휠체어를 사용할 때 발생하는 전복사고와 욕창 의 방지를 위해 Fuzzy기법을 이용한 실시간 휠체어 시트 제어 시스템을 제안하였다[6]. ATmega기반의 스마트보드에 자이로 및 가속도 센서와 Tilt센서를 부 착하여 휠체어 시트를 지형의 경사에 따라서 자동으 로 조절하거나 사용자가 임의로 시트의 기울기를 조 정할 수 있도록 설계하였다. 실시간으로 센서를 체크 하여 지형의 변화에 따라 시트를 항상 평행 상태로 유지시켜 주고, 전동휠체어의 조이스틱뿐만 아니라 스 마트폰 앱을 통해서 사용자가 전동휠체어를 조작할 수 있도록 하였다.
Ⅲ. 제안하는 전동휠체어 및 통합 모니터링 시스템
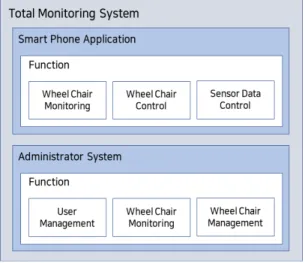
제안하는 전동휠체어 및 통합 모니터링 시스템은 크게 H/W와 S/W로 구성되어 있다[11]. 시스템의 H/W 부분은 사용자가 다목적으로 사용하거나 오르 막, 계단, 고르지 않은 노면을 운행하기에 용이한 무 한궤도를 활용하며 탑승자의 안정성 향상과 전동휠체 어를 경량화하기 위한 프레임과 충격을 완화시키기 위한 응력설계 기반의 동력장치를 포함한다. 또한 전 동휠체어의 센서 데이터 수집 기능, 탑승자가 지형에
맞는 모드를 수동으로 설정하여 주행하기 위한 명령 수신 기능, 수집된 데이터를 모바일 앱으로 송신하는 기능을 가진 MCU를 포함한다. MCU는 블루투스 통 신부, 센서 데이터 수집부, 모터 제어부, 전원부로 구 성하여 설계한다. 아울러 시스템의 S/W 부분은 무선 통신을 활용하여 MCU로부터 전송되는 측정 데이터 를 수신한다. 수신된 측정 데이터는 모바일 단말기에 서 실시간으로 확인할 수 있도록 출력해주는 안드로 이드기반의 앱과 관리자가 전동휠체어의 이력 정보를 관리할 수 있는 C# 기반의 관리자 모듈로 구성된다.
그림 1은 제안하는 시스템의 전체 구성도를 나타내고 있다.
그림 1. 제안하는 전체 시스템 구성도 Fig. 1 Overall structure for proposed system
3.1 전동휠체어 H/W 설계
3.1.1 전동휠체어 MCU 설계
제안하는 전동휠체어의 H/W는 무한궤도 형태로 구성되며, 전동휠체어의 등판 각을 얻기 위한 자이로 센서, 모터주위의 온·습도를 측정하기 위한 온·습도 센서, 사용자의 낙상을 방지하기 위한 프레임, 주행 효율성 및 안정성 향상을 위한 경량 프레임을 포함한 다. 전동휠체어의 전원이 켜지고 사용자의 모바일 단 말기와 연동이 되면, MCU에 수집되는 센서 데이터는 블루투스 통신을 통해 사용자의 모바일 단말기로 전 송된다. 다음은 H/W 설계에 적용된 상세 내용을 구 분하였다.
(a) 주행 및 센서 제어 회로도 (a) Driving and sensor control schematic 그림 2는 전동휠체어 MCU의 설계 회로도이다. 그
림 2의 (a)는 전동휠체어 MCU의 주행 및 센서 제어 부 회로도이다. 주행 및 센서 제어부는 조이스틱을 이 용한 전동휠체어 조종, 전동휠체어에 부착된 센서들의 데이터를 수집하는 역할을 한다. 주행 제어부에서 조 이스틱값을 읽고 두 개의 모터인 모터1과 모터2에 정 확한 신호전달이 필요하다. 사용자가 전동휠체어 구동 시 조향 장치인 조이스틱의 스틱이 중앙에 가면 멈추 도록 회로를 설계하였다. 센서 제어부에서는 초음파 거리 측정 센서를 이용해 전동휠체어 전·후방의 장애 물을 감지하여 안전성을 향상 시킬 수 있도록 회로를 설계하였다. 그림 2의 (b)는 전동휠체어의 불루투스 통신 및 전원부 회로도이다. 통신 및 전원부 회로는 전동휠체어와 안드로이드 디바이스의 통신과 전력을 공급하는 역할을 한다. MCU의 블루투스 통신과 안드
로이드 디바이스와의 연동을 통해 전동휠체어를 제어 하고 센서 값들을 수신한다. 회로에 사용된 블루투스 모듈은 블루투스 RS232C 모듈을 사용하였다. 블루투 스 RS232C 모듈은 HC-06 모듈과 RS232 컨버터 어 댑터를 포함하고 있어 다양한 MPU와 시리얼로 연결 되어 블루투스 통신을 구현할 수 있다. 전동휠체어 제 어를 위해 안드로이드 디바이스에서 주행 모드를 선 택하면 MCU에서 주행 모드 값을 수신하여 해당하는 주행모드를 수행한다. 전원부 회로는 48V로 이루어져 있으며 POWER는 6W, 입력전압은 36~76V, 출력전압 은 5.0V, 출력전류는 1.2A, 출력방식은 single로 설계 하였다. MCU는 센서 데이터를 수집해 블루투스 통신 으로 송신하고, 사용자의 입력을 수신할 수 있도록 설 계한다.
(b). 통신 및 전원 제어 회로도
(b). Communication and power control schematics 그림 2. 전동휠체어 MCU 회로도 Fig. 2 Electric wheelchair MCU design schematic
3.1.2 전동휠체어 전동축 응력 설계
전동휠체어의 전동축은 모터에서 공급되는 회전모 멘트(Moment)를 다른 축으로 전달하는 역할을 한다.
회전모멘트가 전달되면 축의 구성에 따라서 바퀴를 움직이거나 조향할 수 있다. 이때, 회전모멘트에 의해 축에 발생하는 전단응력이 축 재료 고유의 허용 전단 응력보다 크면 축의 파괴가 일어나기 때문에 전동축 설계 시 전단응력과 회전 강도를 고려해야 한다. 또 한, 전동축의 재질은 허용 전단응력 이내로 고려해야 한다. 각 재질에 대한 압축강도, 인장강도, 전단 강도 및 비틀림 강도를 추가적으로 고려해야 한다. 수식 (1)은 전단응력()을 구하는 식으로 응력회전 모멘트 를 T, 극단면 계수를 로 정의한 것이다.
(1)
이때, 재질의 허용 전단응력을 라 하면, 수식 (2) 처럼 전단응력이 허용 전단응력 이내여야 축의 기능
을 수행할 수 있다.
≦ (2)
축 지름 는 주어진 하중에 대한 와 그 임계값
를 대입하여 수식 (3)을 정의한다.
≦ ∴
(3)
수식 (4)와 같이 중공축 에 대해서
라 하면 극단면 계수 는 전단응력 은 수식 (5)와 같다.
(4)
≦
∴
(5)
그림 3은 전동휠체어 전동축 응력 설계도이다. 전 동축의 재질은 허용응력 이내로 안정이 유지될 수 있 도록 충분한 크기와 강도를 적용하였다. 설계도에는 각 재질의 배치 간격, 치수 종류가 명시되어 있으며, 설계 시 재질의 압축, 인장, 전단, 비틀림 강도를 적용 하였다.
그림 3. 전동휠체어 구동축 설계 Fig. 3 Electric wheelchair drive shaft design
3.2 전동휠체어 통합 모니터링 시스템
제안하는 전동휠체어 통합 모니터링 S/W는 안드 로이드 기반의 사용자 인터페이스와 C#기반의 관리자 인터페이스로 구성된다. 안드로이드 기반의 사용자 인 터페이스는 전동휠체어에서 수집되는 센서 데이터를 수신하여 출력해주는 기능과 데이터를 웹서버로 전송 해 데이터베이스에 저장하는 기능, 전동휠체어를 제어 하기 위해 터치로 선택된 주행 명령을 전동휠체어로 보내는 기능으로 구성된다. C#기반의 관리자 인터페 이스는 웹서버를 통해 데이터베이스에 저장되는 전동 휠체어의 데이터를 호출하여 전동휠체어의 운행 정보 확인 기능, 사용자 관리 기능으로 구성된다. 그림 4는 제안하는 통합 모니터링 시스템의 기능 구성도이다.
그림 4. 통합 모니터링 시스템 기능 구성도 Fig. 4 Integrated monitoring system function configuration diagram
Ⅳ. 구현 및 성능 평가 4.1 시스템 구현 환경
표 1은 제안하는 전동휠체어 및 모니터링 시스템의 구현 및 성능 평가 환경을 나타낸다.
Item Details
System Windows(i7-6800K 3.4Ghz Ram : 3.25Gb)
OS Windows 10 Enterprise DBMS Oracle
Implementation Tools
Eclipse Galileo MS-Visual Studio 15 .Net Framework 4.5 Microsoft VisualStudio 2015 AndroidStudio 3.2
Design Tool
StarUML 5.0.2
Microsoft VisualStudio 2015 eXERD, Artwork, OrCad Rayout Language C#, C, JSP, Android
Web Server Apache Tomcat CPU Board ATmega328p
표 1. 구현 환경
Table 1. Implementation Environment
4.2 구현 결과
4.2.1 전동휠체어 프로토타입 결과
그림 5. 응력 설계가 적용된 구동모듈 Fig. 5 Drivemodule with stress design
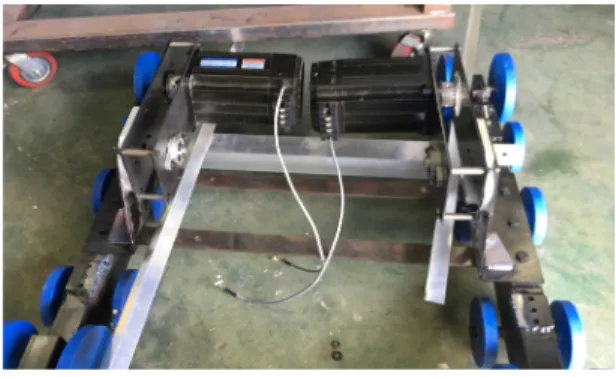
그림 5는 응력 설계가 적용된 전동휠체어 구동 모 듈이다. 전동휠체어에서 제한된 에너지를 효율적으로 사용하는지가 장치의 효용성에 큰 영향을 미친다. 1차 응력설계 결과 모터의 출력이 낮아 전동휠체어의 회 전이 자연스럽지 않았으며, 이를 위해 1500W의 모터 와 Hypoid기어를 적용시켜 이 부분에 대한 문제점을 해결하였다. 그림 6은 제작된 전동휠체어의 프로토타 입이다. 본 논문에서 제안하는 전동휠체어 형태를 갖 추기 위해 무한궤도 타입의 전동휠체어를 개발하였다.
그림 6. 전동휠체어의 전체적인 프로토타입 Fig. 6 Overall prototype of electric wheelchair
4.2.2 전동휠체어 통합 모니터링 시스템 결과
그림 7은 관리자가 원하는 사용자, 전동휠체어, 날 짜를 선택하면 해당하는 기간의 사용자 전동휠체어 이력 정보를 데이터 표와 차트로 출력하는 대시보드 형태의 GUI이다.
그림 7. 전동휠체어 모니터링 및 회원관리 GUI Fig. 7 Monitoring and member management GUI
대시보드 형태의 GUI에는 선택된 전동휠체어의 실 시간 모니터링 UI, 회원 정보 관리, 전동휠체어의 실 시간 위치정보 조회 UI로 구성된다. 위치 정보 조회 의 검색 버튼은 관리자가 실시간으로 운행 중인 전동 휠체어의 위치를 마커 형태로 확인할 수 기능이 있다.
데이터베이스에서 운행 중인 전동휠체어의 최신 위·
경도 정보를 가져와 Javascript메서드의 파라미터로 넘겨주면 Javascript메서드에서는 넘어온 좌표들 중 중간좌표를 계산하여 Goole Map의 중심점으로 설정 하고 이동한다. 이후 좌표정보를 활용해 마커를 생성 한다. 그림 8의 (a)는 사용자가 모바일 단말기를 이용 해 탑승중인 전동휠체어를 제어 및 모니터링 하기 위 한 GUI이다. 모바일 모니터링 시스템은 크게 전동휠 체어 상태 모니터부, 전동휠체어 상태정보 저장부, 전 동휠체어 제어부로 구성되어 있다. 전동휠체어 상태 모니터부에서는 실시간으로 수신되는 전동휠체어의 통신상태, 배터리량, 속도, 온도, 습도 및 기울기를 조 회한다. 상태정보 저장부는 상태정보를 데이터베이스 서버에 저장하기 위해서 JSP기반 웹페이지로 상태정 보를 전송한다. 전동휠체어 제어부는 세 가지 주행 모 드 버튼 중 하나를 터치하면 선택된 주행 모드의 설 정값으로 전동휠체어가 주행하도록 구현하였다. 그림 8의 (b)는 전동휠체어 모니터링 시스템에 등록된 전
체 전동휠체어를 모니터링 GUI이다. 실시간으로 전동 휠체어 모니터링 시스템에 연결된 전동휠체어를 관리 자가 모니터링할 수 있고, 연결되지 않은 장치의 상태 는 연결되지 않았음을 의미하는 이미지와 연결 상태 에 “Non Connected”로 출력된다.
(a). 제어 GUI (b). 모니터링 GUI(메인I) (a). Control GUI (b). Monitoring GUI(Main) 그림 8. 전동휠체어 모니터링 및 제어 시스템(안드로이드) Fig. 8 Electric wheelchair monitoring and control system(Android)
4.3 성능평가
4.3.1 전동축에 전달될 응력해석 결과
그림 9는 전동축에 전달될 응력의 해석 결과이다.
전동축의 경우 모터에서 공급되는 회전 토크를 다른 축으로 전달한다. 이때, 이 비틀림 토크에 의해 축에 발생하는 전단응력이 축 재료 고유의 허용 전단 응력 보다 크면 축의 파괴가 일어나게 된다. 구조에서 가장 중요한 것은 물체의 파괴를 예측하는 것이다. 이러한 파괴를 예측하는 기준이 되는 조건을 항복조건(Yield Criterion)이라 하며, 항복조건의 대표적인 기준으로 폰 미제스 항복조건(Von Mises Yield Criterion)을 활 용한다. 폰 미제스 응력(Von Misess Stress)는 폰 미 제스 항복 조건에 사용되는 응력으로 하중을 받고 있 는 물체의 각 지점에서 최대 비틀림 에너지 (Maximum Distortion Energy)를 나타내는 값이다.
수학적으로 세 개의 주응력 혹은 6개의 독립된 응력 성분들로 정의된다. 폰 미제스 응력 해석 값이 10%
이하일 때 정상으로 간주한다. 본 논문에서는 성능 평
가를 위해 구동축의 직경이 17mm일 때 5번의 응력해 석을 실시하였다. 제안하는 전동휠체어 응력설계에 대 한 폰 미제스 응력 값은 평균 4.401%로 측정되어 정 상범위에 해당하였다.
그림 9. 구동축의 응력해석 결과 Fig. 9 Results of stress analysis of drive shaft
4.3.2 전동휠체어 통신 모듈 성능 평가
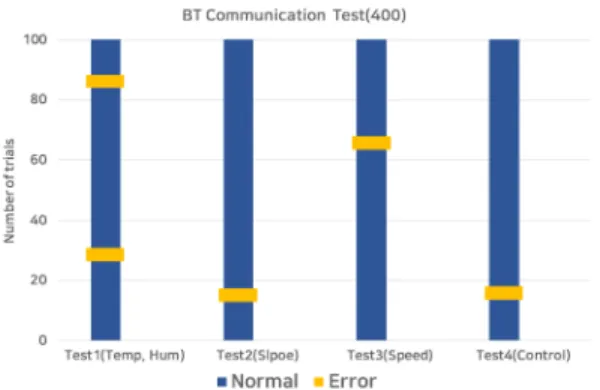
제안된 전동휠체어 모니터링 및 제어 시스템의 성 능 평가를 위해 4가지 통신 모듈 테스트를 실시하였 다. 모터 주변의 온·습도 데이터, 전동휠체어 등판 각 도 데이터, 전동휠체어 주행속도, 모바일 앱의 전동휠 체어 제어 명령 송신에 대하여 정확률을 측정하였다.
4가지 테스트를 통하여 총 100번의 통신 모듈 인식 정확률을 측정하였다. 측정 방식은 각 테스트별로 100 번의 인식 정확률 측정하고 블루투스 통신을 통한 데 이터 전송 결과를 확인하였다. 측정결과, 총 400건의 정확률 테스트 중에서 온·습도 센서 데이터, 전동휠체 어의 등판 각도 데이터, 전동휠체어 주행속도 데이터 의 통신은 각각 100번 중 1번의 수신 에러(정확율 : 99.0%)가 발생하였다. 모바일 앱의 전동휠체어 제어 명령 송신은 2번의 송신 에러(정확율 : 99.5%)가 발생 하였다. 전체 400번의 인식 정확률 테스트 중 5번의 손실이 측정되었으며, 전체 정확율은 98.75%로 측정 되었다. 특히 제어에 해당하는 앱의 전동휠체어 제어 명령 송신오류는 모바일 단말기와 전동휠체어의 통신 연결 에러가 발생하여 데이터 손실이 발생한 것이다.
그림 10은 성능 평가의 결과를 도식화하여 나타낸 것 이다.
그림 10. 전동휠체어 통신 모듈 인식 정확률 성능 평가 결과 Fig. 10 Performance evaluation result of bt communication TEST
Ⅴ. 결 론
본 논문에서는 실내외에서 순발력이 비교적 낮은 장애인, 노약자가 이동수단뿐만 아니라 스포츠 및 레 포츠 등 다목적으로 활용할 수 있는 IoT 기반의 무한 궤도 전동휠체어와 전동휠체어 제어 및 통합 모니터 링 시스템을 제안하였다. 제안하는 시스템은 다목적으 로 사용하거나 오르막, 계단, 고르지 않은 노면을 운 행하기에 용이한 무한궤도를 활용하며 탑승자의 안정 성 향상과 전동휠체어를 경량화하기 위한 프레임과 충격을 완화시키기 위한 응력설계 기반의 동력장치를 포함하고 있다. 검증결과, 전동휠체어의 회전이 매끄 럽지 않아서 토크 알고리즘을 수정하고 1,500W의 모 터와 Hypoid기어를 활용해 출력을 향상시켰다. 또한 C# 기반의 전동휠체어 모니터링을 위한 관리자 인터 페이스와 Android 기반의 모바일 앱 인터페이스 시스 템을 구현하였다. 관리자 인터페이스 모듈은 관리자가 전동휠체어를 실시간으로 확인할 수 있는 모니터링 기능이 포함되어 있으며, 전동휠체어의 이력 정보, 사 용자 정보 등을 저장 및 삭제할 수 있다. 사용자 인터 페이스는 전동휠체어 신시간 모니터링 기능과 전동휠 체어의 주행 모드를 제어할 수 있는 기능이 포함되어 있다.
본 논문에서는 전동휠체어의 모니터링 및 제어에 관해 진행되었지만, 향후 연구에서는 다수의 전동휠체 어의 상태정보 및 운행 이력 정보를 수집한 대용량의 데이터를 기반으로 머신러닝 및 딥러닝 알고리즘을
적용하여 분석한 후, 기기의 고장 예측, 낙상 예방 방 지 등의 기능이 포함될 수 있는 시스템으로 확장할 것이다.
감사의 글
본 논문은 중소벤처기원부에서 지원하는 2017년도 산학연공동기술개발사업(No.C0508506)의 연구수행 으로 인한 결과물임을 밝힙니다.
References
[1] KoROAD, “Study on safety measures for new transportation,” Research Report, Mar. 2016.
[2] Ministry of Land, Infrastructure and Transport,
“The 3rd Traffic Accident Improvement Plan,”
Research Report, Sept. 2017.
[3] B. Kim, “A Study of the slip controller for indoor driving stability of motorized wheelchair,” Master’s Thesis, Korea Polytechnic University School, 2014.
[4] D. Heo, “Developments of Indoor Auto-driving System and Safety Management Smartphone App. for Powered Wheelchair User,” Master’s Thesis, Daegu University Graduate School, 2017.
[5] S. Cho and T. Jeong, “The mounting staris of automated wheelchairs,” J. of Korea Interllectual Patent Society, vol. 12, no. 2, 2010, pp. 28-36.
[6] S. Park and J. Kim, “Optimal Power Maintain of Electric Wheelchair by using Applying Complementary Filter on the Smart Control Systeme,” J. of Digital Contents Society, vol. 16, no. 3, 2015, pp. 355-363.
[7] B. Choi, “Designing and Manufacturing of Custom-made Joystick Handles for Improvement in Control Ability of Power Wheelchairs: Using 3D printing technology,”
Master’s Thesis, Daegu University Graduate School, 2015.
[8] M. Jung, M. Rasheed, S. Ahn, and J. Lee,
“Bio-signal detection monitoring system for auto-navigation power wheelchair,” J. of the Korea Institute of Electronic Communication Science, vol. 3, no. 1, 2009, pp. 335-344.
[9] J. Park, “Safe Driving Algorithm of the Electric
Wheelchair with Model Following Control,”
Doctoral Thesis, Pusan National University Graduate School, 2013.
[10] B. Kim and B. Lee, “Bio-signal-based Driver’s Emotional Response Monitoring System:
System Implementation,” J. of the Korea Institute of Electronic Communication Science, vol. 13, no. 3, 2018, pp. 677-683.
[11] K. Jo, S. Jung, J. Park, K. Kim, K. Yoo, S, Yoo and C. Sim, “Design of Orbit-type-operation Multi-Purpose Tracked Electric wheelchair Prototype,” In Proc. of Int.
Conf. on Electronic and Information Communications, Goesan, Rep. of Korea, Nov.
2017, pp. 165-169.
저자 소개
조경호(Kyeong-Ho Jo) 2018년 2월 순천대학교 멀티미디 어공학과 졸업(공학사)
2018년 3월 ~현재 순천대학교 대 학원 멀티미디어공학과 석사과정
※ 주 관심분야 : 객체지향 모델링, IoT 상황인식, 빅 데이터 처리 및 분석, 딥러닝
정세훈(Se-Hoon Jung) 2010년 2월 순천대학교 멀티미디 어공학과 졸업(공학사)
2012년 2월 순천대학교 대학원 멀 티미디어공학과 졸업(공학석사) 2017년 2월 순천대학교 대학원 멀티미디어공학과 졸업(공학박사)
2015년 ~ 2018년 광양만권SW융합연구소 팀장 2018년 ~ 현재 영산대학교 연계전공학부 조교수
※ 주 관심분야 : 빅데이터 처리 및 확률 분석, 데이 터마이닝, 감성분석, IoT 빅데이터 분석
박재성(Jae-Sung Park) 2018년 2월 순천대학교 멀티미디 어공학과 졸업(공학사)
2018년 3월 ~현재 순천대학교 대 학원 멀티미디어공학과 석사과정
※ 주 관심분야 : 멀티미디어 DB & IR, 데이터분 석, 빅데이터 처리 및 분석
유승현(Seung-Hyun Yoo) 2007년 2월 한영대학 기계·자동차 학과 졸업 (전문학사)
2012년 ~ 현재 ㈜네모플랜 대표이사
※ 주 관심분야 : 기계설계, Simulation CFD, 의료 보조기구, 영상처리 시스템
심춘보(Chun-Bo Sim) 1996년 2월 전북대학교 컴퓨터공 학과 졸업 (공학사)
1998년 2월 전북대학교 대학원 컴퓨터공학과 졸업(공학석사) 2003년 2월 전북대학교 대학원 컴퓨터공학과 졸업 (공학박사)
2005년 ~ 현재 순천대학교 정보통신·멀티미디어공 학부 교수
※ 주 관심분야 : 빅데이터 시스템, 머신러닝, IoT/IoE 플랫폼, 멀티미디어 시스템