1. 서 론
지금 이 순간에도 다양한 형태의 드론들이 세 계의 하늘을 날아다니고 있다 [1-3]. 초소형의 드 론에서부터 중대형의 드론 , 거기다 사람을 태우고 다닐 수 있는 택시형 드론에 이르기까지 오늘날 많은 이들의 생활 및 산업 구조에 급속도로 영향 을 미치고 있는 기술 중에 하나가 바로 드론이다 . 이러한 드론을 제어하는 것은 드론내에 탑재되어 있는 소프트웨어와 이를 관제할 수 있는 관제용 소프트웨어로 구분될 수 있다 [2-5]. 대부분의 엔 터테인먼트용이나 간단한 항공 촬영용 드론의 경 우 관제용 소프트웨어 부분은 필요치 않고 2.4Ghz 대역의 리모트 컨트롤러 (Remote Controller) 즉 RC라 불리는 제어기를 사용하여 비행모드 , 짐벌 등을 제어한다. 하지만, 비행체의 크키가 크거나 특수 임무를 수행하기 위한 특화된 임무를 수행하는 드론의 경우에는 지상에서 해당 드론의 위치와 상태에 대한 모니터링 그리고 동작 제어를 수행하는 GCS(Ground Control System) 가 필요하다 [2]. 즉 드론 제어용 소프트웨어는 드
론 내에 탑재되는 FCS(Flight Control System) 소프트웨어와 GCS용 소프트웨어로 구분될 수 있 다 . FCS는 드론의 자세를 제어하는 부분과 임무 등을 수행하는 비행제어 부분으로 구분될 수 있으 며 , GCS는 통신부와 사용자 인터페이스로 구분 될 수 있다 [1-3]. 하지만 공공의 안전측면에서 GCS 는 단순히 드론의 상태를 모니터링 하는 수 준이 아니라 건물 , 나무 등 지형지물과의 충돌을 방지하는 기능 , Signal Loss나 Low Battery 상태 에서의 RTH(Return to Home) 기능, 비행금지구 역에 진입할 경우 강제 셧다운 기능 , 특화된 목적 에 맞게 추가된 기능을 제어하고 판단 할 수 있도 록 하는 것이 필요하다 [3,4].
오늘날 이러한 드론 소프트웨어는 데스크탑 소 프트웨어의 발전 , 모바일 소프트웨어 플랫폼의 발 전과도 유사하게 오픈소스 기반의 플랫폼과 상용 소프트웨어 기반의 플랫폼으로 구분되어 발전하 고 있다 . 자사제품에 전용 비행 제어 소프트웨어 를 탑재하여 매우 안정적인 비행을 수행할 수 있 는 세계 최대 드론 제작 기업인 DJI는 최근 오픈 소스 기반의 SDK를 제작 발표하였다[6]. 이는 상 용드론의 활성화 측면에서 오픈소스 기반의 발전 전략이 드론의 생태계를 조성하는데 있어서 더 큰 역할을 할 수 있을 것이라 보고 있는 것이다 .
기존의 3D Robotics와 퀄컴, 인텔 등을 중심으로
항공 드론 제어용 소프트웨어 및 알고리즘 개발 동향
이윤석*, 김은*, 김영섭*
※ 교신저자(Corresponding Author) : 이윤석, 주소 : 경남 창 원시 의창구 원이대로 69번길 20, 202호 (주)엘케이스마트, 전화: 055-255-5275, FAX: 055-255-5276, E-mail : [email protected]
* (주)엘케이스마트
(E-mail : [email protected])
하는 Dronecode 오픈소스 그룹이 급속도로 성장 하고 있는 현상을 반영하고 있다 [7]. 또한 GCS의 개발부분은 앞서 말한것처럼 특화된 목적의 내용 을 충족하는 형태로 개발 되고 있으나 , 향후 그 목적인 공공의 안전에 관점을 둔 높은 수준의 관 제체계로의 변화 발전될 것으로 사료된다 .
2. 드론 제어용 소프트웨어의 구조 및 특징
2.1 드론 플라이트 컨트롤 시스템(FCS)
드론을 구성하는 구성요소는 그림 1과 그림 2에 서 보는것과 같다 [8].
그림 1. Pixhawk FC를 이용한 드론 시스템 구성도 .
드론 내부 시스템 구조는 크게 제어부 , 통신부, 센싱부 , 구동부 그리고 촬영부로 구분되며 먼저 통신부의 경우에는 그림 2에서 보는 것처럼 무선
그림 2. 드론 시스템의 구성도
제어 및 드론 정보를 송수신 하기 위한 RC,
Telemetry 그리고 Wi-Fi가 존재한다. 이중 항공
촬영 등 오늘날 대중화 되어 있는 드론의 대부분
은 RC를 통해 제어를 진행하고 Telemetry는 비
행체의 정보를 교환하는 등의 용도로 주로 사용하
나 , 국가별 허용 주파수가 상이하므로 허용된 주
파수 대역의 Telemetry를 사용하는 것이 필요하
다 . 그리고 Wi-Fi의 경우에는 초소형 드론 등 비
행거리가 비교적 짧은 경우 , 스마트폰을 통한 제
어등의 경우에 활용되며 요즘 항공촬영시 확보되
는 실시간 영상의 전송용도로 사용되기도 한다 .
센싱부에는 드론의 자세 정보와 비행정보를 획득
하기 위한 센서들의 집합으로 GPS를 기반으로하
여 Roll, Pitch, Yaw 값을 획득하는 자이로센서,
고도센서 , 가속도 센서, 지자계 센서등이 기본적
으로 비행체의 자세 및 비행상태를 확인하는 요소
로 사용된다 . 구동부의 경우에는 모터의 속도를
조절하는 ESC가 주요 구성품으로 FC로부터 속
도 제어관련 정보를 획득하여 BLDC 모터를 제어
하는 역할을 수행한다 . 그리고 촬영부는 고정식
카메라를 장착한 방식과 3축으로 이동 가능한 짐
벌 시스템을 장착한 형태로 구분된다 . 일반적으로
RC 제어를 진행할 경우 사전 설정에 의해 할당된
채널에 의해 드론의 비행모드에 대한 변경과 촬영
부에 대한 제어 등을 진행할 수 있다 . 그리고 제어
부의 경우에는 센싱부에 의해 획득된 정보를 이용 하는 자세제어 알고리즘과 비행제어 알고리즘이 탑재되어 있다 . 자세 제어 알고리즘의 경우에는 Kalman Filter를 사용하여 PID 알고리즘에 의해 산출된 PID 값을 보정하고 자세제어를 진행한다.
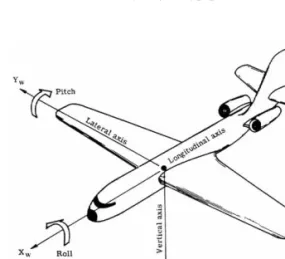
자세 제어는 기본적으로 비행체가 가지는 Roll, Pitch, Yaw의 상태 값을 확인하는 것부터 현재 비행체의 속도와 움직임을 파악하는 것에 있다 . 그림 2에서 보는것처럼 비행체의 Roll, Pitch, Yaw를 드론은 모두 가진다[9].
그림 2. 비행기의 Roll, Pitch, Yaw
이처럼 드론은 정지 상태에서도 자신의 상태를 정확하게 알기 위한 방법이 필요하다 . 왜냐하면 자신의 상태에 대한 정확한 정보가 존재하지 않는 상태에서 비행체가 외력에 의해 이동을 하게 되는 흔히 말하는 흘러가는 현상이 일어나더라도 비행 체는 자신은 정상적으로 떠 있는 상태라고 판단하 게 된다면 이는 호버링이 이루어졌다고 볼 수 없 다 . 호버링이라 하면 특정한 위치에서 안정적으로 비행체가 떠 있는 상태를 말하는데 , GPS 가 존재 하는 외부에서의 호버링은 GPS 값을 기반으로
하는 위치 보정기술 알고리즘을 적용하면 된다지 만 , 실내의 경우에는 안정적인 호버링을 유지하기 위해서는 자신의 위치에 대한 상태 , 그리고 이 상 태에 대한 정확한 판단을 통해 자세를 잡는 것이 필수적이기 때문이다 [10]. 그러므로 드론은 안정 적인 호버링을 위해 끊임없이 자신의 상태를 점검 하고 확인해야 하는데 이때 기본적으로 비례제어 인 PID 산출을 통한 제어를 수행한다. 하지만 이 제어 방식은 지속적인 오차값이 발생하고 이것이 피드백되어 증가되므로 이에대한 정확한 검출 및 보정이 필요한데 이때 사용되는 것이 Kalman Filter 알고리즘이다.
그림 3. 드론의 호버링
그림 3에서 보는 것처럼 드론의 호버링은 자세제
어 알고리즘의 필수적인 요소이다 . 앞서 말한 것
처럼 실내에서는 IMU(Inertial Measurement
Unit)를 이루는 센서들의 정보를 바탕으로 비행
체의 자세를 제어하는 것이 기본인데 이 과정에서
모터의 진동 , 회전수의 미세한 차이, 바람 등의 영
향으로 천천히 흘러가듯 한쪽 방향으로 이동하는
경우들이 발생할 수 있다 . 이러한 문제는 실외에
서 더 크게 발생하지만 , GPS를 사용하여 위치를 지속적으로 보정하는 알고리즘을 사용하면 실외 에서는 안정적인 호버링을 유지할 수 있다 [10]. 그 림 4에서 보는것처럼 RTK(Real Time Kinematic)방식은 지상국의 GPS 위치와 드론에 탑재된 GPS에서의 좌표로부터 위치보정 데이터 를 합성해서 드론의 정확한 좌표를 실시간으로 확보할 수 있다 [11]. 이 방법은 5cm 정도의 오차 범위를 가지므로 드론의 GPS만을 사용한 오차인 5m 보다 매우 적은 오차범위를 가질 수 있다. 하 지만 실내의 경우에는 GPS가 수신되지 않으므로 안정적인 호버링이 불가능하다 .
그림 4. RTK 방식의 정밀 측위
그러므로 실내에서의 안정적 호버링에 대한 연 구들이 지속적으로 진행되어 왔는데 , 가장 많이 사용되는 것은 마커를 인식하는 영상처리 기반의 호버링이다 . 마커를 이용한 실내 호버링은 그림 5와 같이 바닥에 인식가능한 크기의 다각형의 마 커를 두고 해당 마커를 영상처리를 통해서 인식하 여 자신의 위치가 틀어질 경우 해당 위치를 찾아 가기 위한 알고리즘을 탑재한 경우와 3차원의 처 리를 위한 특정 물체에 마커를 부착하고 이를 IR 카메라를 통해 인식하는 방법이 있다 [10,12]. 이는 매우 높은 인식률과 안정적인 호버링으로 인해
오늘날 실내에서 호버링을 진행할 때 가장 많이 사용되는 방법이다 . 하지만 마커가 존재하지 않는 환경에서는 정밀한 호버링을 수행할 수 없는 단점 이 있다 .
그림 5. 마커 기반 실내 호버링
두 번째 방법은 초음파 센서를 사용한 거리측정 방법이다 . 그림 6과 같이 비행체의 전후좌우상하 단에 초음파 센서를 부착하여 센서를 통해서 획득 된 거리 정보를 바탕으로 자신의 위치를 인식하고 이를 회피하는 기술이다 [13]. 주로 물체 회피를 위 한 기술이 실내에 적용될 경우 벽을 기준으로 비 행체의 안정성을 확보할 수 있으므로 실내 호버링 시에 활용될 수 있으나 이 방법은 마커기반에 비 해서 처리 알고리즘이 매우간단하다는 장점이 있 으나 초음파센서의 탐지거리와 실내 크기의 문제 이로 인해 발생하는 갭에 대한 처리 방법이 부재 하다는 것이 단점이며 정밀 제어가 불가능하다 .
그림 6. 초음파센서를 이용한 물체 탐지
세 번째 방법은 LIDAR 센서를 사용한 실내 스캔 방법이다 [14]. 라이다 센서는 레이저 송신부, 검출 부 , 데이터 송수신부로 구분될 수 있다. 이 센서는 레이저 신호의 변조 방법에 따라 두가지 방식으로 나뉘는데 TOF(Time Of Flight)와 phase-shift 방식으로 구분될 수 있다 . TOF 방식은 레이저가 펄스 신호를 방출하여 물체들로부터 반사되는 펄 스 신호들의 수신시간을 기반으로 거리를 측정하 며 phase-shift 방식은 특정주파수에서 연속적으 로 변조되는 레이저 핌을 방출하고 물체로부터 반사되어 되돌아오는 신호 위상변화량을 측정하 는 방식이다 [14]. 이러한 라이다 센서를 고속으로 회전시켜 거리 및 공간정보를 획득하는 방법으로 정밀한 공간 정보를 확보할 수 있는 장점이 있으 나 , 센서 자체에 대한 비용이 매우 크다는 단점이 있으나 최근 그림 7에서보는 것처럼 드론 등에 부착가능한 형태의 상대적으로 저렴한 라이다 센 서가 출시되고 있다 [15].
그림 7. 미국 Scanse사의 Sweep 라이다 센서를 탑재 드론
2.2 드론 Ground Control Station 소프트웨어 드론에 대한 지상제어는 일반적으로 그림 8과 같은 RC 조종기를 사용한다.
그림 8. RC 조종기
2.4Ghz 대역의 주파수를 가지고 일반적으로 4채
널 이상의 채널수를 보유하고 있는 제어기들을
사용하여 드론의 비행을 제어한다 [10]. 하지만 이
러한 제어는 가시거리 이내에서의 드론에 대한
제어가 유효하고 가시거리를 넘어서는 경우에는
드론 제어는 사실상 어렵다 . 특히나 드론의 FC에
는 비행시 Front를 갖추고 있다. 보통은 LED를
통해 Front를 인식할 수 있도록 하고 있으나 거리
가 멀어지고 장애물들이 있는 상황에서는 Front
에 대한 인식이 어려우므로 RC 조종기 만으로 제
어하는 것은 상당히 어렵다 . 즉 실시간으로 드론
의 상태 정보를 사용자가 확인할 수 있어야 해당
드론에 대한 정밀 제어가 가능하다는 것이다 . 하
지만 , 기존의 RC 조종기로는 사실상 이러한 제어
가 불가능하기 때문에 DJI와 같은 업체에서는 스
마트폰을 연계한 제어방식을 취하고 있다 . 왜냐하
면 GCS를 구축하는 것이 기존의 RC의 간편한 제
어 방식에 비해 비용적 측면 , 제어방식 그리고 통
신 방법등의 문제를 안고 있기 때문이다 . 그럼에
도 불구하고 앞서 말한 이유로 GCS에 대한 이슈
는 분명하다 . GCS는 그림 9와 같이 구성될 수 있
다 .
그림 9. Skagmo Electronics의 GCS 블럭도
그림 9에서 보는 것처럼 GCS는 크게 통신부와 사용자 인터페이스 그리고 제어부로 구성되며 Wi-Fi, RC 그리고 Telemetry 등을 지원해야한다 [16]. 해당 통신을 통해 드론의 상태 정보를 실시 간으로 확인할 수 있으므로 수신된 정보는 사용자 인터페이스로 전송되어 화면에 실시간으로 표시 되어야 한다 . 특히 GPS를 통한 위치 정보는 임무 수행등을 위해 필수적인 요소이다 . 그리고 제어부 에서는 드론의 상태를 모니터링 뿐만 아니라 제어 할 수 있는 형태의 구조가 되어야하는데 기본적으 로 사전 임무 지정 방식과 실시간 제어 방식으로 구분할 수 있다 . 사전 임무 지정방식은 Way Point 비행을 수행할 수 있도록 드론에 비행전 임무를 지정하는데 이때 임무에 지정할 내용으로는 GPS 위치 , 고도, 정지시간 등이 일반적으로 설정된다.
GPS 위치는 맵과 연동되어야 하며 맵을 통해서 GPS 위치 지정을 수행 할 수 있어야 한다. 그리고 실시간 제어 방식은 드론의 위치를 실시간으로 조작 제어가 가능하도록 하는 방식으로 궁극적으 로 GCS는 모니터링 및 제어가 가능한 구조여야 하므로 실시간 제어가 가능해야 한다 . 실시간 제 어 방식은 앞서 말한 통신 매체를 활용하여 드론 의 상태를 실시간으로 변경할 수 있어야 한다 . 거 리 , 통신속도, 전송데이터 등의 내용을 고려하여
통신 매체를 선정하는 것이 필요하며 오늘날 2개 이상의 통신 매체를 사용하는 것이 일반적이다 .
3. 드론 제어용 소프트웨어의 개발 동향
3.1 드론 FCS 개발 동향
드론 FC의 경우에는 세계 시장을 장악하고 있 는 DJI와 다수의 개발자를 중심으로 시장을 형성 하고 있는 오픈소스 그룹으로 구분할 수 있다 . DJI는 자신들이 개발한 안정성이 높은 펌웨어를 탑재한 FC를 중심으로 시장을 확대해 나가고 있 고 , 오픈소스 그룹들은 개발자들의 다양한 니즈를 반영할 수 있는 형태로 시장을 확대해 나가고 있 었다 . 하지만 최근 기존의 각자도생하던 드론 오 픈소스 개발업체들이 드론코드라는 이름으로 거 대 그룹을 형성하여 서비스를 제공하기 시작하였 다 . 이에 따라 DJI에서는 드론 충돌 처리용 모듈 인 가이던스가 탑재 가능한 매트리스 100 드론을 출시하며 SDK를 지원하기 시작하였고, DJI A3 플라이트 컨트롤러와 최근 출시된 DJI의 ZENMUSE Z3의 경우에도 기존의 제공된 DJI SDK를 사용하여 기체에 대한 개발이 가능하다 [6].
그림 10. 드론코드 구성업체
이처럼 DJI 역시도 다수의 개발자들을 끌어 들 이고 자사의 드론이 플랫폼으로서의 역할을 수행 할 수 있도록 지속적으로 개발 환경을 제공할 것 으로 보인다 . 그림 10에서 보는 것처럼 오픈소스 기반의 드론의 경우에는 기존 오픈소스 중에서 가장 많이 활용되고 있는 플라이트 컨트롤러인 아두 파일럿과 픽스호크를 기반으로하는 프로젝 트 그룹으로 아두파일럿을 개발하는 3DR과 퀄컴 이 주축을 이루고 있으며 골드와 실버 그룹으로 구성되어 있다 [7]. 기본적으로 아두파일럿은 3DR 에서 출시한 정식 빌드는 APM 2.6 버전이 있으며 오픈소스 이므로 다양한 형태의 다른 버전의 소스 코드들이 존재한다 . 그림 11에서 보는것처럼 기본 적으로 펌웨어 위에 비행제어와 관련된 코드들이 탑재되고 공통의 API가 탑재되며 필요에 따라 영 상 송신 및 처리 그리고 충돌회피 알고리즘을 위 한 코드들이 탑재된다 [7]. 하드웨어에 최적화된 펌웨어를 바탕으로 아두파일럿에 탑재되는 소스 인 APM 코드는 아두이노 Arupilot.ino 파일과 라 이브러리 등으로 구성되어 있으며 내부에서 스케 줄러에 의해 스케줄링이 되어 통신과 제어등의 함수들이 동작하게 되어 있다 . 이러한 구조에서 필요에 따라 스케줄링을 조절할 수도 있고 소스를 추가하여 스케줄링에 포함시킬 수 도 있다 .
그림 11. 드론에 탑재되는 소스코드 구조
3.2 드론 지상제어 소프트웨어 개발 동향
드론의 지상제어 방법은 크게 3가지로 구분된
다 . 첫 번째로는 RC 조종기를 통한 제어방식으로
이 방법은 가장 많이 사용되는 방법으로 별도의
지상제어를 위한 소프트웨어가 필요없다는 장점
이 있지만 드론의 상태에 대해 정확히 알수 가
없고 가시거리 밖에서의 제어는 불가능하다는 단
점이 있다 . 두 번째 방법으로는 스마트폰을 사용
하여 제어하는 방법으로 별도의 전용 장비를 구매
하지 않고 사용자가 소유하고 있는 장비를 사용하
여 제어한다는 장점과 드론의 상태에 대한 모니터
링과 실시간 영상 획득이 가능하다는 장점이 있
다 . 하지만 Wi-Fi 기반의 통신으로 통신 거리가
짧다는 것이 단점이다 . 이 방법의 경우에는 DJI에
서 제공하는 모바일 SDK를 통해서 프로그래밍이
가능하고 , DJI GO 앱을 통해서 드론을 제어할 수
있다 [6]. 그리고 3DR에서는 3DR에서 만든 드론
인 SOLO용 제어기가 있으며 Parrot사의 드론의
경우에는 스마트폰을 기본 제어국으로 사용한다
[17]. 그리고 드론에 대한 제어 및 모니터링이 가
능한 어플리케이션으로 드로이드플래너가 2.0 버
전까지 출시되어 있다 . 이때 사용하는 기본적인
통신 방법은 MAVLink 통신 프로토콜을 준수하
는데 , MAVLink 통신역시도 오픈소스로 드론코
드 프로젝트에 함께 참여한다 [7,10]. 그리고 마지
막 방법으로는 전용의 지상제어국을 설치하는 방
법으로 이 방법은 컴퓨터에 지상제어 프로그램을
탑재하고 Telemtery 통신 포트를 통하거나,
Wi-Fi 또는 RC 컨트롤러를 직접 연결하여 통신
을 수행하는 방법이다 . 실시간 영상 확보를 위해
서 Wi-Fi를 함께 경행하여 처리할 수 있으며 다
양한 통신 환경에 적용할 수 있고 , 개발 과정에서
목적에 맞게 기능을 추가하거나 UI를 구성할 수
있다는 장점이 있다 . 하지만 이 방법의 가장 큰
단점은 별도의 컴퓨터가 존재해야한다는 점이다 . 그림 12에서 보는것과 같이 전용 지상제어국 소프 트웨어로서는 드론코드 프로젝트에서 지원하는 Mission Planner가 일반적이다. C#으로 개발되어 있고 MAVLink를 지원하며 Way Point 비행 지 원 및 상태 확인 로그 데이터 획득이 가능하다 [7].
그림 12. 드론코드의 지상제어 소프트웨어
이와 같은 지상제어 소프트웨어의 비중은 갈수록 커질 것이다 . 왜냐하면 단순히 드론을 눈앞에서 보고 제어하는 것이 아닌 드론이 일상 생활 곳곳 에서 역할을 수행하고 담당하기에는 해당 드론에 대한 제어 및 정보 획득이 필수적이므로 소형화된 전용제어기가 증가할 것으로 판단된다 . 그리고 이 와 같이 지상제어국의 기능이 관제체계 개발의 요구로 이어질 것으로 보인다 . 오늘날 드론의 경 우 드론이 비행가능한 구역과 그렇지 못한 구역으 로 구분할 수 있다 . 국내의 경우에는 최근 국토교 통부가 드론 비행안전정보를 제공하기 위한 스마 트폰 어플리케이션인 Ready to Fly를 공개하고 서비스를 시작하였으며 드론 전용 비행구역을 29 곳으로 늘려 이에 대한 정보를 제공한다 . 이러한 정보를 제공하는 이유는 드론이 비행할 수 있는 지역이 제한적이기 때문이다 . 이는 공공의 안전과 관련되어 있기 때문에 비행 제한 구역에서의 드론
운행하는 것을 제한하는 필수적이다 . 하지만 오늘 날 드론에 대한 제어는 비행체를 제어하는 사용자 에게 모두 일임이 되어 있다 . 이는 악의적인 사용 자가 범죄와 테러의 용도로 드론을 언제든지 활용 할 수 있다는 것으로 드론의 활성화와 더불이 이 러한 문제는 지속적으로 증가할 것으로 보인다 . 또한 이러한 문제는 드론이 우리의 일상생활 속에 서 다양한 역할을 하는데 있어서 장애를 일으키는 요소로서도 존재할 것이다 . 이러한 문제를 해결하 기 위하여 그림 13에서 보는것처럼 미국항공우주 국에서는 미국 최대 무선통신 업체 버라이즌과 함께 통신기지국을 활용한 클라우드 기반 민간 상업용 드론 감시 기술을 개발 중이기도 하다 [18].
이는 민간 상업용 드론이 언제 어느곳에서 비행을 하더라도 해당 드론에 대한 추적이 가능하고 상황 에 따라 강제 셧다운을 시킬 수 있는 기능이 필요 하다 .
4. 결 론
본 논문에서는 드론 제어 소프트웨어의 특징에 대해 비행제어 소프트웨어와 지상제어 소프트웨 어를 중심으로 살펴보았다 . 비행제어 소프트웨어 는 센서를 중심으로 자신의 위치를 파악하고 자세 제어와 비행제어를 진행하는 소프트웨어로서 최
그림 13. NASA가 개발중인 무인항공기
관제시스템
상의 안정성을 보여 드론관련 선두 기업인 DJI의 상용 FC와 오픈소스 프로젝트 그룹인 드론코드 를 기반으로한 비행제어 소프트웨어에 대해 분석 해 보았다 . 또한 지상제어 소프트웨어의 경우 현 재의 RC 기반의 제어 방식에서 추후 관제체계로 서의 제어가 필요할 것으로 판단되었다 . 본 논문 의 본문에서는 제시하지 않았지만 IEEE 기준 최 근 논문에서는 비행체의 자동 항법과 관련한 논문 들이 다수를 이루고 있으며 이를 해결하기 위해 영상처리 방법을 통한 해결에 대한 논문이 발표되 고 있다 . 그리고 드론의 제어를 위해 퍼지 알고리 즘을 탑재한 제어 방법도 발표되었다 . 그리고 이 러한 방법들 중에서도 향후 드론의 안정적인 비행 을 위한 관제체계에 대한 연구와 방법 역시도 지 속적으로 증가할 것으로 기대된다 .
참 고 문 헌
[ 1 ] Z. Mustapa, S. Saat, S.H. Husin, and N. Abas,
“Altitude Controller design for multi-copter UAV,” Computer, Communications, and Control Technology(I4CT), pp.382-387, 2014.
[ 2 ] Y. S. Lee, E. Kim, D. C. Seol, and Y. S. Kim,
“Effective Message Authentication Method for Performing a Swarm Flight of Drones,”
International Conference on Environmental Engineering and Remote Sensing, 2015.
[ 3 ] M. Peacock and M. N. Johnstone, “Towards Detection and Control of Civilian Unmanned Aerial Vehicles,” Australian Information Warfare and Security Conference, 2013.
[ 4 ] R. Mitchell and I. R. Chen, “Adaptive Intrusion Detection of Malicisous Unmanned Air Vehicles Using Behavior Rule Specifications,”
IEEE TRANS. ON SYSTEMS, MAN, AND CYBER. SYSTEMS, vol. 44, pp. 593-604, 2014.
[ 5 ] M. Buehler, K.Iagnemma, and S.Singh, “The
DARPA Urban Challenge:Autonomous Vehicles in City Traffic,” Springer, 2009 [ 6 ] DJI, http://www.dji.com
[ 7 ] Drone Code, https://www.dronecode.org/
[ 8 ] PIXHAWK, https://pixhawk.org/
[ 9 ] Pitch, Roll, Yaw, http://happy8earth.tistory.
com/492
[10]
TECH M Report (2015) http://www.
techm.kr/bbs/board.php?bo_table=ar- ticle&wr_id=760
[11] Real Time Kine matic, https://en.wikipedia.
org/wiki/Real_Time_Kine matic
[12]
D.Y.Won,H.D.Oh,S.S.Huh,B.G.Park,J.S.
Ahn,H.C.Shim et. al., “Vision-based Small UAV Indoor Flight Test Environment Using Multi-Camera,” Korean Society for Aeronautical and Space Sciences Journal Vol. 37, No.12, pp.1209-1216, 2009.
[13]
S.A,Shin,I.H. No, T.H.Hwang, S.H.Shin, J.B.Shim, M.S.Oh et.al., “A Method of Collision Avoidance for Autonomous Mobile Robot using the antenna, IR and ul- trasonic,” Journal of Korea Multimedia Society Vol.15, No.10, pp.1236-1246, 2012
[14]J.D.Kim, K.K.Kwon and S.I.Lee, “Trands
and Applications on Lidar Sensor Technology,” Electronics and Telecommunications Trends Vol. 27, No.6, pp.134-144 2012.
[15] Sweep LADAR Sensor (2016) http://postm umble.tistory.com/106
[16] UAV/FPV-project: The ground control sta- tion(2015) http://www.skagmo.com/page.php
?p=projects/14_gcs
[17] 3D Robotics https://3dr.com/
[18] UTM(2015), https://utm.arc.nasa.gov/index.
shtml
이 윤 석
∙2008년 경남대학교, 컴퓨터공학과, 공학석사
∙2012년 경남대학교, 컴퓨터공학과, 공학박사
∙2012년3월-2015년2월 경남대학교 강의전담교수
∙2015년3월-2016년5월 (주)엘케이스마트 대표이사
∙2015년3월-현재 창신대학교, 소프트웨어공학과 겸임교수
∙2015년5월-현재 (주)엘케이스마트 기술이사
∙관심분야: 드론비행제어,네트워크 보안, 인증프로토콜
김 은
∙2011년 경남대학교, 컴퓨터공학과, 공학석사
∙2014년 경남대학교, 컴퓨터공학과, 공학박사
∙2015년3월-2016년5월 (주)엘케이스마트 전무이사
∙2015년5월-현재 (주)엘케이스마트 대표이사
∙관심분야: 지상제어시스템, 임베디드시스템, 네트워크 인 증
김 영 섭
∙2014년 경남대학교, 컴퓨터공학과, 공학석사
∙2015년5월-현재 (주)엘케이스마트 개발팀장
∙관심분야: 드론비행제어, 임베디드시스템
![그림 9. Skagmo Electronics의 GCS 블럭도 그림 9에서 보는 것처럼 GCS는 크게 통신부와 사용자 인터페이스 그리고 제어부로 구성되며 Wi-Fi, RC 그리고 Telemetry 등을 지원해야한다 [16]](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5252120.629104/6.892.85.394.146.332/electronics의-블럭도-통신부와-인터페이스-제어부로-구성되며-telemetry-지원해야한다.webp)
