IMV용 양방향 비례 유량제어밸브 개발
Development of Bi-Directional Flow Control Valve for IMV
정규홍 Gyu Hong Jung
1. 서 론
고유가 및 배기가스 규제에 대응하기 위해 개발 되는 다양한 에너지 저감기술은 이제 승용차뿐만 아니라 건설중장비와 농업용기계에도 확대적용되고 있다. 특히, 무게 대 동력비가 높은 장점으로 인하 여 굴착기를 비롯한 대부분의 건설중장비 동력전달 방식으로 채택되는 유압시스템은 불가피한 에너지 변환으로 인하여 효율이 낮은 단점을 갖는다. 전세 계 건설중장비 개발업체에서는 이를 극복하기 위해 다양한 기술을 개발하여 적용하고 있다. IMV (independent metering valve)는 MCV(main control valve)의 기계식 스풀밸브를 대체하여 액추에이터 작동조건에 적절하게 유로단면적을 독립적으로 조 절함으로써 압력손실을 감소시켜 유압시스템의 효 율을 향상시키는 방안이다.
현재 굴착기에 적용되는 유압시스템은 주행 및 선회모터, 붐, 암, 버켓 실린더를 작동시키는 유압이 운전자가 조작하는 조이스틱으로부터 발생되는 파 일럿 유압으로 작동되는 MCV의 스풀밸브를 통하여 공급되는 방식이며 하나의 스풀밸브가 하나의 액추 에이터를 구동하므로 유압이 공급되는 미터인 (meter-in)과 작동기로부터 오일이 배출되는 미터아 웃(meter-out) 유로단면적이 스풀변위에 따라 연동되 어 결정된다. 따라서 액추에이터 구동모드가 스풀변 위에 의해 결정되며 별도의 유압회로를 추가하지 않으면 선회감속이나 붐 하강 시의 에너지 회생 (recuperation)은 구현할 수 없다.
IMV 시스템은 하나의 액추에이터 구동회로를 3 방향 3위치 밸브 2개로 구성(Fig. 1(a) 참조)하거나 2 방향 2위치 밸브 4개로 구성(Fig. 1(b) 참조)하여 액 추에이터에 공급되거나 배출되는 유량이 통과하는 유로단면적을 독립적으로 조절할 수 있도록 설계된 다. 3방향 밸브 2개로 구성하는 경우에는 폐쇄중립 (closed center)만이 가능한 반면에 2방향 밸브 4개로 구성하는 경우에는 포트에 연결되는 2개 밸브를 동 시에 개방함으로써 개방중립(open center) 상태도 가
능하다. 기존 MCV가 폐쇄중립으로 작동되므로 3방 향 밸브 2개로 구성되는 IMV는 기존 MCV의 모든 기능을 대체할 수 있지만 액추에이터 구동 중에 PE(powered extension)에서 HSRE(high side regeneration extension)으로 IMV 작동모드가 변경되 는 경우에는 폐쇄중립으로 인하여 액추에이터가 일 시적으로 정지하므로 충격발생이 예상된다. 이에 비 하여 2방향 밸브 4개로 구성되는 IMV는 개방중립 이 가능하므로 IMV 작동모드 스위칭 시 일시적인 개방중립 상태를 유지시켜 연속적인 액추에이터 구 동이 가능하다. 2방향 밸브 4개로 구성되는 IMV가 완벽한 독립 미터링이 가능한 장점을 갖지만 하나 의 액추에이터 구동에 4개 밸브가 필요하므로 MCV 가 커지는 단점이 있다.
IMV 시스템에 적용되는 밸브는 전기적인 신호로 변위가 제어되는 비례 솔레노이드밸브이며 액추에 이터 구동에 많은 유량이 흐르는 굴착기용 IMV 시 스템에는 전기적인 신호로 제어되는 비례 솔레노이 드밸브 1차 제어압을 이용하여 스풀밸브(또는, 포펫 밸브) 변위롤 조절함으로써 유량을 증폭시키는 방식 의 유량제어밸브가 사용된다. IMV 구동방식에서는 실린더 전진/후진(또는, 유압모터 정방향/역방향 회 전)의 기존 스풀밸브 구동방식외에 유로단면적를 독 립적으로 조절함으로써 재생(regeneration)회로로 액 추에이터를 구동하거나 고압의 액추에이터 배출유 량을 공급라인으로 회생저장하는 회로의 구성이 가 능하다.
굴착기에 IMV형 MCV를 적용하는 가장 큰 이유 는 각 액추에이터에 작용하는 부하의 크기와 요구 되는 속도특성이 다른 상태에서 개별 또는 복합조 작 시 액추에이터의 작동모드를 적절하게 조절하여 공급유량을 감소시키거나 유압에너지를 회생을 통 하여 효율향상이 가능하기 때문이다. IMV형 MCV 구현을 위해서는 굴착기 작업 시 액추에이터의 작 동상태를 파악할 수 있는 센서정보를 이용하여 작 동모드를 결정하고 비례 솔레노이드밸브 변위를 제 어하는 ECU(electronic control unit) 설계가 필수적이
다. IMV는 기존에 적용되는 하나의 스풀밸브를 2개 또는 4개의 비례 유량제어밸브로 대체하므로 MCV 설계비용과 설치공간이 증가하는 단점이 있으나 전 자제어시스템을 이용해서 굴착기 액추에이터를 효 율적으로 작동시켜 에너지 효율향상을 도모할 수 있기 때문에 많은 연구가 시도되고 있다.
pS
pR Qa
Qb
QS
A B
Fload x.p
(a) IMV control with two 3/3 valves
pS
pR Ksa
Kbt
Qa Qb
QS
Ksb
Kat
A B
Fload x.p
(b) IMV control with four 2/2 valves Fig. 1 IMV control system
IMV에 적용되는 2방향 비례 유량제어밸브는 대 용량 유량조절을 위하여 스풀에 작용하는 유동력을 보상할 수 있는 2단 밸브로 설계되며 양 방향으로 유량 조절이 가능한 양 방향밸브가 필수적이다.1-2) 한 쪽 방향으로만 유량조절이 가능한 2단 유량조절 밸브는 2단 밸브를 구동시키는 비례 솔레노이드밸 브 압력이 특정한 고압 측 포트로부터 감압되어 발 생되므로 고압으로부터 저압으로 유체가 흐르는 경 우에만 가능하고 저압 측압력이 고압 측보다 높을
때에는 유량조절이 되지 않는다.3)
Fig. 2는 IMV로 편로드 유압실린더 양측에 고압 을 작용시켜 전진하는 HSRE 작동모드이다. 비례 유 량제어밸브 는 고압으로부터 작동기로 유량이 공급되고 는 작동기로부터 고압으로부터 유량이 배출되므로 와 2방향 밸브에 흐르는 유체방 향이 반대이다. 따라서 단 방향 유량제어밸브를 적 용하면 어느 하나는 유량제어가 되지 않으므로 미 터인과 미터아웃 모두를 이용한 작동기 속도조절이 불가하다.
A B Fload x.
pS
pR Ksa F
Kbt=0
Qa Qb
QS
Kat=0
Ksb
Fig. 2 HSRE(high side regeneration extension) IMV에 적용되는 양 방향밸브의 설계에는 여러 가지 방식이 있으나 선진사에서 양산개발된 IMV기 반 굴착기4)에 적용된 비례 유량제어밸브가 최신 기 술로 평가되고 있다. 본 기술해설에서는 선진사 IMV 기반 굴착기 유압회로를 통하여 2단 비례 유량 제어밸브의 작동원리를 분석하고 추정된 파라미터 를 통하여 성능을 예측한 내용5)과 이를 바탕으로 수행된 양 방향 비례 유량제어밸브 독자모델 개발 연구를 소개하고자 한다. 선진제품에 대한 벤치마킹 을 통해 비례 유량제어밸브의 정특성을 파악하여 독자모델을 설계하였으며 시제품 실험을 통하여 유 량제어성능을 검증하였다.
2. 선진사 비례 유량제어밸브
Fig. 3(a)는 선진사에서 개발된 굴착기 IMV에 적 용되는 2단 비례 유량제어밸브의 유압회로이고 Fig.
3(b)는 Fig. 3(a)의 유압회로와 동일한 기능을 갖도록 구성된 비례 유량제어밸브의 내부 구조를 나타낸다.
3방향 비례 솔레노이드밸브는 기준 압력을 감
압시킨 제어압으로 유량제어 스풀변위 를 가 변시킨다. 기준압은 보조펌프 토출유량으로부 터 릴리프 밸브로 조절되고 제어압은 유량제어 스풀에 작용한다. 3방향 비례 솔레노이드밸브는 상 시 저압형으로 구동전류에 비례하여 제어압 가 증가하며. 제어압이 면적 차에 의해 솔레노이드 스풀에 피드백되는 자력제어(self-controlled)구조이다.
psc
pS pSR
pc
xv
From main pump From Aux. pump Feedback spring
(a) hydraulic circuit
Mechanical force feedback spring
xs isol
pSR
psc pR
pS pc
xv=0 kv kvf
ks
Aorf
Alorf Q4
Q2
Q1
Fm
Q3 d3
(b) schematic configuration
Fig. 3 Proportional FCV for bench marking
솔레노이드 자기력이 스프링 압축력과 유압력의 합 과 같은 상태에서 스풀이 정지하므로 자력제어 구 조는 자기력에 비례하는 제어압을 안정적으로 조절 할 수 있게 한다.
작동기와 연결되는 유로단면적을 조절하는 기능 의 유량제어밸브는 스풀 반대쪽에 기준압이 작 용하여 제어압 가 낮을수록 스풀변위 가 증가 되는 구조이다. 즉, 일 때 이고
일 때 m ax이다. 에서는 스프링 압축력이 포펫형태의 스풀에 작용하므로 누 유를 방지한다. 유량제어 스풀변위 는 비례 솔레 노이드밸브 제어압 와 스프링 압축력에 의해 결정되므로 포트압력 와 의 압력 차에 무관하 게 양 방향으로 유량제어가 가능하다.
유량제어 스풀에는 기준압과 제어압에 의한 유압력과 스프링 압축력 외에 스로틀되는 유량에 의해 발생되는 유동력이 스풀변위를 감소시 키는 방향으로 작용하는데 피드백 스프링 는 유 동력에 의한 스풀변위 의 변화를 비례 솔레노이 드밸브에 스프링력으로 피드백시켜 유동력을 보상 하는 기능을 수행한다. 일정한 자기력에 의해 스풀 변위 가 제어되는 상태에서 유동력에 의해 스풀 변위가 감소하면 비례 솔레노이드 스풀에 제어압
가 감소하는 방향으로 피드백 스프링력이 작용하 므로 스풀변위 가 증가하여 유동력의 영향을 감 소시키게 된다.
선진사 굴착기에 적용되는 IMV는 Fig. 3의 비례 유량제어밸브 4개로 구성되어 붐, 암, 버켓, 스윙모 터 작동을 제어하며, 좌우 주행모터에는 기존과 동 일한 방식의 스풀밸브가 적용된다.
비례 솔레노이드밸브 특성과 유량제어밸브 설계 파라미터가 주어지면 비례 솔레노이드밸브 구동전 류로 발생되는 자기력 에 대하여 유량제어밸브 변위 및 부하유량 는 수학적 모델로부터 구할 수 있다. Fig. 4는 선진사 비례 유량제어밸브의 제반 설계 파라미터를 가정하여 분석된 정상상태에서 자 기력 에 따른 스풀변위 와 부하유량 을 나 타낸다. 는 피드백 스프링의 스프링 상수로
은 피드백 스프링이 없는 상태를 나타내고
는 부하유량 의 오리피스 직경으로 가 작을수록 출구압력 가 증가한다.
피드백 스프링이 없는 경우에는 자기력이 일 정하여도 유동력에 의하여 스풀변위가 크게 변화하
고 이에 따라 부하유량이 변동되지만 피드백 스프 링이 있는 경우에는 mm에서 제어압 가 포화되는 영역을 제외하고는 스프링력 피드백으로 인하여 부하유량 가 일정함을 확인하였다. 피드 백 스프링이 포함된 설계에서는 유동력 보상을 통 하여 유량제어 스풀변위 가 자기력 에 대하여 선형적으로 나타났으며 일정한 자기력 에 대하 여 일정한 부하유량 가 조절되는 것으로 분석되 었다. 따라서 피드백 스프링은 비례 유량제어밸브의 안정성 확보에 도움이 되는 것으로 판단되었다.
0 5 10 15 20
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0
Kvf=0, dlorf=5mm Kvf=0, dlorf=4mm Kvf=0, dlorf=3mm Kvf=10000N/m, dlorf=5mm Kvf=10000N/m, dlorf=4mm Kvf=10000N/m, dlorf=3mm
Xv[mm]
Fm[N]
(a) spool displacement
0 5 10 15 20
0 30 60 90 120
Kvf=0, dlorf=5mm Kvf=0, dlorf=4mm Kvf=0, dlorf=3mm Kvf=10000N/m, dlorf=5mm Kvf=10000N/m, dlorf=4mm Kvf=10000N/m, dlorf=3mm
Q4[lpm]
Fm[N]
(b) load flow
Fig. 4 load flow characteristics
3. 독자모델 비례 유량제어밸브
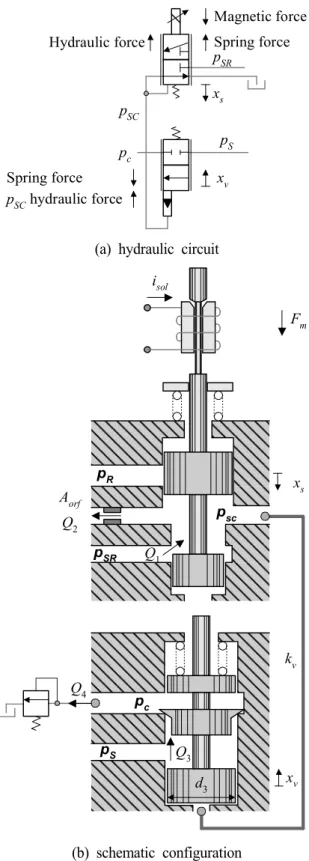
선진사에서 양산개발된 IMV에 적용되는 비례 유 량제어밸브 해석결과를 바탕으로 독자모델 비례 유 량제어밸브를 설계하였다. Fig. 5는 독자모델 비례 유량제어밸브의 유압회로와 도식적인 내부 구조를 나타낸다. 자력제어형 3 방향 비례 솔레노이드밸브 제어압 를 유량제어 스풀에 작용시켜 제어압
에 비례하는 스풀변위 가 발생되도록 설계 하였다.
pSR pSC
Spring force Magnetic force Hydraulic force
xs
pSC hydraulic force
pS pc
xv Spring force
(a) hydraulic circuit
pS pc
d3 xv
kv isol
pSR
psc pR
Q1
Fm
xs Aorf
Q2
Q3 Q4
(b) schematic configuration Fig. 5 Independent proportional FCV
비례 솔레노이드밸브는 건설기계용으로 개발된 HYDAC사 제품으로 정격전압은 24V, 최대 제어전 류와 제어압은 950mA와 35bar, 정격유량은 12lpm이 다. 벤치마킹을 통해 비례 솔레노이드 스풀과 유량 제어 스풀 사이에 연결된 피드백 스프링의 역할과 기능을 확인하였지만 상용 비례 솔레노이드밸브를
이용하는 경우에는 기계적인 변위 피드백 설계가 어려워 적용하지 않았다. Fig. 6은 IMV용 독자모델 비례 유량제어밸브에 적용된 HYDAC사의 3방향 비 례 솔레노이드밸브이다.
Fig. 6 HYDAC proportional solenoid valve
xv xOVRL=2mm
overlap notch
circular square semicircle xn RN=2mm xSQRN=2mm
RN
xv=0
Fig. 7 FCV spool notch design
0 1 2 3 4 5 6 7 8 9
0 100 200 300 400 500
Av[mm2]
Xv[mm]
Fig. 8 Flow path area of FCV spool
비례 유량제어밸브 스풀직경은 제어압 에 의한 유압력이 유동력을 충분히 보상할 수 있도록
mm 로 설계하였다. 스풀직경이 크면 작은 변위에도 스풀에 의해 형성되는 유로 단면적이 크 게 되므로 스풀변위에 따른 유량이득을 적절하게 조절하기 위하여 Fig. 7과 같은 노치를 대칭으 로 4개 설계하였다. 스풀변위가 이면 누 유방지를 위한 불감대로 유로가 형성되지 않으며
이면 반 원형의 노치를 통해,
이면 사각형 노치를 통해 유로 단면적이 형성되고 이면 직경의 스풀 원주면적으로 유로 단면적이 형성되도록 설계하였다. 스풀변위 에 따라 형성 되는 유로 단면적은 다음과 같으며 Fig. 8은 스풀변 위 에 따른 면적선도를 나타낸다.
(1)
(2) cos
sin
(3)
(4)
4. 비례 유량제어밸브 성능시험
IMV 적용을 목적으로 개발된 독자모델 비례 유 량제어밸브의 성능시험에는 Fig. 9의 유압시험장치 를 제작하여 활용하였다. 최대 600lpm의 유량을 토 출하는 텐덤형 사판식 피스톤 펌프는 파일럿 감압 밸브 압력 가 낮을수록 토출유량이 증가하는 부압 제어형(negative control)이다. 펌프 토출유량은 수동 조작밸브를 거쳐 비례 유량제어밸브로 공급되고 비 례 유량제어밸브 압력 차는 공급압 와 제어압 를 조절하는 릴리프 밸브로 설정된다.
성능시험에서는 펌프 토출유량과 의 압력 차를 일정하게 유지한 상태에서 비례 솔레노이드밸 브 구동전류에 따라 변화되는 유량을 측정하였다.
유압시험장치에서 측정되는 물리량은 공급압 , 제 어압 , 파일럿 감압밸브 압력 , 비례 솔레노이드
밸브 기준압 , 비례 솔레노이드밸브 제어압
의 압력과 기어형 유량계 측정유량 , 선형변위계 로 측정되는 스풀변위 이다. 모든 센서출력은 성 능시험을 목적으로 개발된 IMV 시험제어기에서 A/D 변환이나 capture 입력을 이용한 주파수 측정방 식으로 인터페이스되며 샘플링 주기는 100Hz이다.
Fig. 10(a)는 정방향 유량제어 시험, Fig. 10(b)는 역방향 유량제어 시험의 연결상태를 나타낸다. 정방 향은 가 고압으로 압력포트로부터 압력포 트로 유량이 흐르는 상태이고 역방향은 정방향과 반대로 가 고압으로 압력포트로부터 압력 포트로 유량이 흐르는 상태이다. 양 방향 비례 유량 제어밸브는 비례 솔레노이드밸브 제어전류에 따른 정방향과 역방향의 유량특성이 동일하거나 유사해 야 하므로 양 방향 유량시험을 통해 성능을 확인하 였다. Fig. 11은 비례 솔레노이드밸브 구동과 제반 시험데이터를 측정하는 기능의 IMV 시험제어기로 TI사의 F28335 DSP를 이용하여 설계하였다. 시험제 어기는 비례 솔레노이드밸브 전류를 측정하여 PWM 방식으로 제어하며 임베디드 프로그램에 내 장된 함수발생기를 이용해서 0.01Hz의 삼각파형으 로 비례 솔레노이드밸브 전류를 변화시켜 정상상태 에서의 응답특성을 시험할 수 있다. IMV 시험제어 기에는 4개의 비례 솔레노이드밸브 구동회로가 설 계되어 있으므로 비례 유량제어밸브 단품에 대한 성능시험뿐만 아니라 적절하게 설계된 제어알고리 즘으로 구현된 IMV 구동기능으로 유압 액추에이터 를 구동할 수 있다. IMV 시험제어기는 PC에서 수행 되는 모니터링 프로그램과 115,600 baudrate의 직렬 통신을 이용하여 10Hz 주기로 지령신호를 수신하고 100Hz로 샘플링된 데이터를 전송한다. Fig. 12는 모 니터링 프로그램의 메인 창을 나타낸다.
vS
pC
pS
pi pR
vL
vi Flow control valve
iPSV
Load pressure relief valve
Supply pressure relief valve
Piston pump(tandem type)
Pilot pressure reducing valve QS
Qr QP pSC
pSR xv
Fig. 9 Proportional FCV test circuit
LVDT
(a) forward flow
LVDT
(b) reverse flow
Fig. 10 Proportional FCV test layout
(a) front side
(b) rear side
Fig. 11 IMV test controller
Fig. 12 Monitoring program main window
Fig. 13은 정방향 유량제어 시험에서 비례 솔레노 이드밸브 구동전류 변화범위가 0.2-0.6A이고 0.01Hz 의 삼각파형으로 변화시켰을 때의 비례 솔레노이드 밸브 전류(), 제어압(), 유량( 를 나타낸 다. 릴리프 밸브로 설정되는 공급압 bar이 고 토출유량을 조절하는 파일럿 감압밸브 압력은
bar이다. 비례 솔레노이드밸브 제어압은 0.6A에서 15.6bar가 측정되었으며 이 때 비례 유량 제어밸브를 통해 흐르는 유량은 190 lpm이었다. 유 량 발생이 시작되는 제어압은 4.5bar로 이는 유량제 어밸브 스풀에 장착된 스프링의 초기 압축력과 2mm의 스풀 불감대로부터 결정된다. 비례 솔레노이 드밸브 제어압이 영인 상태에서 유량은 발생되지 않으므로 스프링 초기 압축력과 스풀 불감대에 의 해 누유가 효과적으로 방지됨을 확인하였다.
Fig. 14는 비례 솔레노이드밸브 구동전류를 0.01Hz 삼각파로 0.2A에서 0.6A까지 변화시켰을 때 정방향과 역방향의 유량제어특성을 나타낸다. 비례 솔레노이드밸브 제어압 은 0.3A보다 작은 전류에 서는 압력이 발생되지 않는 불감대와 증가할 때와 감소할 때 다른 값을 나타내는 히스테리시스 (hysteresis)를 갖는데 히스테리시스는 0.5A에서 대략 1.5bar임을 확인하였다. 제어압의 히스테리시스로 인 해 제어전류에 따른 제어유량은 히스테리시스가 더 욱 확대되는 특성을 나타내었다. 반 원형 노치에 의 해 유량이 발생되는 초기 구간을 제외하고는 0.4- 0.6A까지 제어유량은 구동전류에 비례함을 알 수 있다. 따라서 유량이득이 매우 작은 0.4A 구간에서 는 압력 차에 의한 유량제어로 액추에이터를 저속 구동하고 유량이득이 큰 구간에서는 펌프 토출유량 으로 액추에이터 속도를 조절함하는 방식으로 효율 향상을 도모할 수 있다. 역방향 유량제어 시험결과 를 정방향과 비교해보면 비례 솔레노이드밸브 제어 압 는 동일하지만 제어유량이 정방향의 경우보다 다소 작게 발생함을 알 수 있다. 이는 양 방향 유량 제어밸브로 설계되었지만 누유를 방지하기 위한 포 펫형태의 구조와 유동방향에 따른 압력강하 특성의 차이로 인해 정방향과 역방향이 완전히 동일한 특 성을 나타내지 않는 것으로 판단된다. 그러나 제어 유량은 구동전류에 비례하여 안정적으로 발생됨을 확인하였다.
Fig. 15는 정방향 유량제어 시험에서 유량제어밸 브 스풀변위에 대한 제어유량특성을 보여주며 측정 된 스풀변위의 초기 위치는 1mm로 나타내었다.
2mm의 오버랩 구간에서는 유량이 발생되지 않으며 2-6mm는 노치 단면적 구간의 유량특성을 6mm 이 상에서는 원형 스풀 단면적 구간의 유량특성을 확 인할 수 있으며 스풀변위에 대한 제어유량의 히스 테리시스는 크지 않음을 알 수 있다.
0 10 20 30 40 50 60 70 80 90 100 110 120 0
1 2 3 4 5 6
PSVi Psc Q
PSVi[A]*10, Psc[bar]/3, Q[lpm]/50
Time[sec]
Fig. 13 FCV forward flow test
0.2 0.3 0.4 0.5 0.6
0 1 2 3 4 5 6
FWD Q REV Q FWD Ps-Pc REV Ps-Pc
Psc[bar]/3, Q[lpm]/50, (Ps-Pc)/30
PSVi[A]
Fig. 14 Comparison of bi-directinal characteristics
0 2 4 6 8
0 100 200 300 400
Q[lpm]/50
Xv[mm]
Fig. 15 vs. characteristics of forward flow
4. 결 론
IMV 시스템은 작동효율이 낮은 유압시스템의 효 율향상을 목적으로 액추에이터에 공급 및 배출되는 유로단면적을 4개의 2방향 비례 유량제어밸브를 이 용하여 독립적으로 조절할 수 있도록 설계된 밸브 구동방식이다. 기존의 4방향 스풀밸브는 기계적으로 공급과 배출 유로 단면적이 연동되는 반면에 IMV 는 전기적인 신호를 이용하여 독립적으로 조절함으 로써 압력손실을 줄이고 재생 및 회생작동모드를 활용함으로써 에너지 효율향상을 도모할 수 있다.
IMV를 구현하기 위해서는 양 방향 유량제어가 가능하면서 대용량 유량이 흐를 때 발생되는 유동 력을 보상하는 기능의 비례 유량제어밸브가 요구된 다. 최근 해외 선진사에서 굴착기에 양산 적용된 IMV용 비례 유량제어밸브는 1단 비례 솔레노이드 제어압으로 2단 유량제어밸브 스풀변위를 가변시키 는데 비례 솔레노이드 스풀과 유량제어밸브 스풀 사이에 피드백 스프링이 설계되어 있다. 피드백 스 프링의 역할과 기능은 비례 유량제어밸브의 내부구 조를 도식적으로 정립하고 설계 파라미터를 가정하 여 분석될 수 있는데 해석결과 피드백 스프링은 유 동력을 보상하여 비례 유량제어밸브의 안정성을 증 대시키는 것으로 파악되었다.
본 고에서는 선진제품에 대한 벤치마킹 결과를 바탕으로 IMV에 적용되는 양 방향으로 동일한 유 량제어성능을 갖는 2방향 비례 유량제어밸브를 설 계하였으며 시험을 통해 성능을 검증하였다. 유량제 어밸브 스풀변위를 제어하는 압력은 건설기계용으 로 개발된 상용 비례 솔레노이드밸브를 이용하여 발생시켰으며 선진사에 적용된 피드백 스프링은 구 현하기 어려워 개루프 구동방식을 적용하였다. IMV 구동을 위해 설계된 시험제어기를 이용하여 비례 솔레노이드밸브 구동전류에 따른 제어유량을 시험 한 결과 불감대와 히스테리시스 특성, 구동전류에 비례하여 안정적으로 발생되는 제어유량, 양 방향 유량제어가 가능함을 확인하였다. 특히, 선형 변위 계를 이용하여 유량제어밸브 변위를 측정한 결과 스풀에 설계된 노치에 따른 유량특성과 히스테리시 스가 거의 없는 스풀변위와 제어유량 사이의 관계 를 확인하였다.
향후에는 개발된 IMV용 양 방향 유량제어밸브를 활용하여 IMV 기반의 MCV를 개발하고 굴착기 액 추에이터를 작동조건에 따라 적절한 모드로 구동하 는 제어 알고리즘을 개발하여 굴착기 에너지 효율 향상을 시도할 예정이다.
참고 문헌
1. Shenouda, A., Quasi-Static Hydraulic Control Systems and Energy Savings Potential Using Independent Metering Four-Valve Assembly Configuration, PhD Dissertation, Georgia Institute of Technology, Atlanta, Georgia. 2006.
2. Amir Shenouda and Wayne Book, "Optimal Mode Switching for a Hydraulic Actuator Controlled With Four-Valve Independent Metering Configuration", International Journal of Fluid Power 9, No.1, pp.35-43, 2008.
3. G. H. Jung, "Steady-state Analysis of Proportional Flow Control Valve with Large Capacity", 2009 KSFC Spring Conference Proceeding, pp.67-72, 2009.
4. Caterpillar, Catalog for 336F XE Hydraulic Excavator, 2016
5. G. H. Jung, "Static Analysis of Dedicated Proportional Flow Control Valve for IMV", 2018 Spring Conference on Drive and Control, pp.115-122. 2018.
[저자 소개]
정규홍
E-mail : [email protected] Tel : 031-539-1974
1963년 7월 30일생.
1993년 서울대학교 기계설계학과 박사 과정 졸업. 1993년 현대자동차 중앙연구 소 선임연구원, 1995년-현재 대진대학교 컴퓨터응용기계공학과 교수, 자동변속기 변속제어기 설계, 운 동재현기 제어시스템설계, 서보밸브 및 비례제어밸브 컨트롤 러 설계 및 개발, 메카트로닉스를 이용한 제어시스템 개발에 종사. 유공압건설기계학회, 대한기계학회, 한국자동차공학회 회원.