Article Information
Manuscript Received July 1, 2020, Revised July 22, 2020, Accepted July 29, 2020, Published online September 30, 2020
The authors are with KEPCO Research Institute, Korea Electric Power Corporation, 105 Munji-ro Yuseong-gu, Daejeon 34056, Republic of Korea. Correspondence Author: Joon-Young Park ([email protected])
ORCID: 0000-0001-8984-6536(J. Woo); 0000-0003-3423-9389(J. Park); 0000-0002-6063-6874(S. Kim); 0000-0002-9191-4507(J. Lee); 0000-0002-8469-1261(S. Ryu)
This paper is an open access article licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International Public License. To view a copy of this license, visit http://creativecommons.org/licenses/by-nc-nd/4.0
This paper, color print of one or more figures in this paper, and/or supplementary information are available at http://journal.kepco.co.kr.
송전선로 드론 순시∙정밀점검 운용 및 공공용 드론길 구축방안에 대한 연구
Jung-Wook Woo, Joon-Young Park, Seok-Tae Kim, Jae-Kyung Lee, Seo-Hyeon Ryu
우정욱, 박준영, 김석태, 이재경, 류서현
Abstract
KEPCO Research Institute developed a GIS-based autopilot drone inspection system for electric power facilities and since its pilot application in 2017, it has been successfully used to detect defects in power transmission lines. This paper presents how to operate this system in the field of power line inspection. Power transmission lines are located in a wide variety of environments such as plains, mountains, river crossings, sea crossings, and industrial areas. Among these, some transmission lines are difficult for human workers to access because of their geographies and some should be checked more often due to their severe contamination. Considering these field conditions, we classified drone operation in two categories to increase its effectiveness and efficiency - patrol surveillance and detailed inspection tasks. This paper describes the detailed procedures of the two tasks above and their field application experiences. In addition, this paper newly proposes how to construct public drone roads by using the information of KEPCO’s power transmission lines.
Keywords: Drone, Patrol, Inspection, Transmission Line, Drone Road I. Introduction 국내 대부분의 송전선로는 산악지역에 위치해 있기 때문에 접근하기가 어렵고 자연재해에 취약한 구조적 특성을 갖고 있다. 따라서, 송전선로를 고장 없이 운영하기 위해서는 주기적 예방 점 검이 필수적인데 근래까지는 사람이 산을 등반하여 철탑 인근까지 가거나 철탑에 직접 올라 육안으로 설비 상태를 확인해야 하는 어 려움과 위험이 있어왔다. 최근 드론 기술이 급격히 발전되고 인력 점검에 비해 점검 시간, 작업 효율 및 점검 신뢰도 측면에서 우수 성이 입증됨에 따라 전력설비 점검으로의 사용이 점차 확대되고 있는 추세이다. 한국전력공사 전력연구원에서는 2016년말 드론이 송전선로 를 따라 자동으로 비행하면서 광학줌 카메라와 열화상 카메라로 설비를 점검하는 드론 운용기술을 개발하였고, 2017년 충청남도, 경상남도 지역의 철탑 31기의 점검에 성공적으로 시범적용 하였다 [1]-[3]. 이 때의 점검 방식은 두 철탑 간의 경간(span)에 설치된 모든 설비 즉, 철탑, 애자(insulator), 금구류(fittings) 뿐만 아니라 A상, B상, C상의 전력선들(power conductors)과 가공지선(overhead ground wire)에 대한 확대 영상을 취득하여 점검하는 방식이었다. 하지만, 시범적용 수행 결과, 송전 철탑은 일반 평지 뿐 아니라 산 악지, 강, 하천, 바다 등 다양한 지형을 지나가고 또한 공업지역, 도시지역, 해안지역 등 선로 주변 환경이 다양하기 때문에 드론 운 용 방식을 세분화할 필요성이 제기되었다. 본 논문에서는 이러한 현장 요구사항을 반영하여 송전선로가 속해 있는 다양한 지형과 주변 환경 특성에 적합하도록 개발한 드론 운용 방안을 다룬다. 다음으로, 본 논문에서는 공공목적으로 활용 가능한 드론길 (drone road)을 구축하는 새로운 방법론적 개념을 제시하고자 한 다. 지난 2016년 국토교통부는 물류운송, 재난안전, 농업 등 드론 의 활용 분야 증가에 따라 안전관리 및 사고예방을 위해 드론을 위한 전용 드론길 구축을 추진한다고 밝혔다 [4]. 하지만, 국내에서 아직까지는 도시 내 고도 150 m 이하의 공간을 안전 비행 수준 (target level of safety)을 기준으로 최대 두 개의 공역으로 나누는 도시 공간 분할의 초기 모델을 제시하는 연구만 수행되었을 뿐 [5], 공공목적으로 활용 가능한 드론길의 구체적인 구현 방법이 제 시되지 않았다. 이에 본 연구에서는 한국전력공사가 보유하고 있는 송전선로 정보를 활용하여 생성 가능한 드론길의 구체적인 구현 방법론을 다룬다. 전력구는 대도시 지역 등에 전력을 공급하는 중요한 기간시 설물로서 ‘지진·화산재해대책법’에서 요구하는 내진안전성 확보대상 구조물이다. 따라서 본 논문에서는 전력구의 일반적인 형태인 박스
형 개착식 전력구를 대상으로 내진성능을 평가하여 산업통상자원 부의 요구수준을 만족하는지와 보유하고 있는 내진성능을 확인해 보고자 하였다. 그리고, 대표적인 전력구를 대상으로 지진응답 해 석 및 구조실험을 수행하여 내진성능 평가 결과의 타당성을 확인 함으로써 전력구의 내진 안전성을 검증해 보았다.
II. Drone Operation Scheme
한국전력공사에서 송전선로를 순시점검하기 위해 드론을 운 용하고 있는 방안을 요약하면 Fig. 1과 같다. 드론을 활용하여 송전선로를 점검해온 수 년간의 경험을 바 탕으로 판단하였을 때, 모든 송전선로에 대하여 기본적으로 촬영하 는 철탑, 애자, 금구류 외에 전력선들과 가공지선까지 점검할 필요 는 없다. 반면, 전력선, 가공지선을 포함한 모든 설비를 정밀하게 점검할 필요가 있는 지역은 공업 지역, 염해 지역, 바다나 강 횡단 및 장경간(long span) 개소이다. 공업 지역은 매연 또는 분진 등 환경적인 공해가 많이 작용하는 지역으로 공장과 같은 오손원 인 근 지역이고, 염해 지역은 염분 부착에 의해 설비가 오손되는 지역 이다. 바다, 강 횡단 및 장경간 개소는 풍압에 의해 전선 금구류 및 전선 손상이 우려되는 개소로 다른 개소에 비해 접근성이 매우 떨어져 인력 점검이 어려운 개소이다. 해당 지역의 범위는 애자 청 소의 기준이 되는 공업∙분진 지역의 경우 오손원으로부터 4 km, 해 안에서 12 km 이내를 참조하고 [6] 과거의 고장 실적, 지형, 기후 특성 등의 요인을 고려하여 결정한다. 상기의 정밀점검 개소에 해당하지 않을 경우에는 철탑 설비 점검과 선로 주변환경의 변화를 인지하기 위한 순시(patrol surveillance) 작업을 수행한다. 순시의 경우 송전선로를 따라 비행 하면서 선로 및 주변상황을 전체적으로 관찰하여 이상유무를 감시 하고 철탑 인근에서는 호버링(hovering)을 하면서 철탑을 면밀히 점검한다. 특히 산악지역 중에서 지장수목 특별관리개소의 경우에 는 라이다(LiDAR, Light Detection And Ranging)를 장착한 별도의 3D 라이다 드론을 활용하여 전선과 수목과의 이격거리를 측정함 으로써 지장수목 발생 여부를 감시한다.
A. Detailed Inspection Task
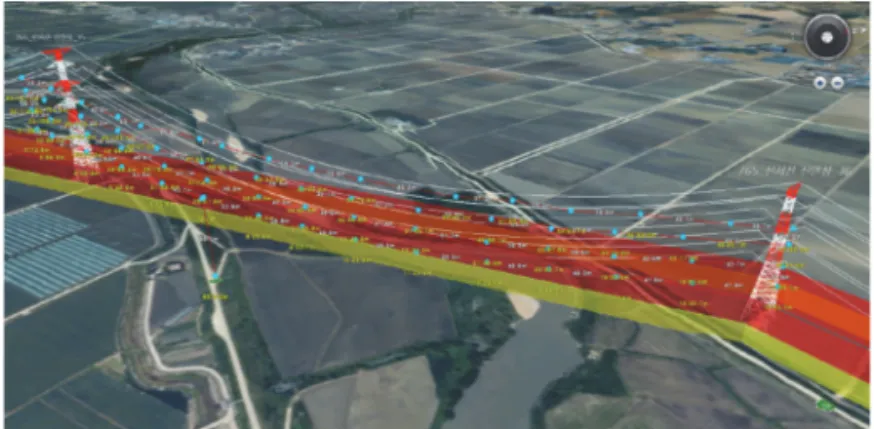
드론을 이용한 정밀점검은 철탑, 애자, 금구류, 전력선, 가공 지선, 항공장애표시구 등 전체 설비를 고배율 광학줌 카메라와 열 화상 카메라로 촬영하여 점검하는 작업이다. 이를 위해서 Fig. 2와 같이 “하단선 → 중단선 → 상단선 → 가공지선” 순으로 전체 설비 를 따라 비행하는 비행경로를 설정하여 드론 점검을 수행한다. 이 때, 드론이 두 철탑 사이 경간에서는 전력선을 따라 비행하면서 전 력선을 촬영하기 때문에 비행 경로점의 고도를 전력선의 이도 (sag)를 고려하여 비행 경로점을 선정해야 한다. Fig. 2에서 볼 수 있듯이 드론은 비행경로 상에서 애자련(insulator string) 인근에 도착하면 호버링하면서 애자와 금구류를 확대 촬영한다. Fig. 3은 정 밀점검 작업을 위한 드론의 실제 비행경로 사례를 보여준다. Fig. 4는 송전선로 점검에 사용한 드론과 촬영된 영상 및 열 화상의 사례를 보여준다. 정밀 점검 수행시 작업 효율성과 촬영 영
Fig. 2. Drone flight path for detailed inspection task.
Fig. 3. Example of drone flight path for detailed inspection task (river crossing area).
상 품질을 고려하였을 때 드론의 적정 비행속도를 실제 현장시험 을 통하여 3-4 m/sec로, 적정 풍속은 5 m/sec 이하로 선정하였다. 풍속이 5 m/sec 이상에서 날릴 경우 기체 진동으로 인해 촬영 영 상 품질이 많이 저하되어 불량 검출을 위한 영상 판독이 쉽지 않 을 수 있다. 특히, 드론이 촬영 대상인 전력선보다 낮은 높이로 비 행하는 경우에는 Fig. 5와 같이 촬영 대상에 그늘이 많이 지거나 역광으로 촬영될 수 있기 때문에, 전력선보다 5-7 m 이상 위로 비 행하도록 비행경로를 설정하는 것이 바람직하다.
B. Patrol Surveillance Task
정밀점검 지역을 제외한 나머지 지역은 순시 작업을 수행한 다. 순시 지역은 지형에 따라 평지와 산악지역으로 구분해서 수행 하는데 산악지역 중에서 수목 침해(vegetation encroachment) 우 려 개소의 경우에는 카메라 점검과는 별도로 라이다 장착 드론을 이용하여 지장수목 발생 여부를 점검한다. 정밀점검 작업은 두 철탑을 대상으로 수행된 반면, 순시 작업 의 경우에는 드론 기체의 비행 가능시간과 철탑들 간의 경간 거리 를 고려하여 다수의 철탑으로 구성된 다경간 점검이 가능하다. 순 시 작업의 비행경로는 Fig. 6과 같이 각 철탑의 가공지선 이상 높 이의 경로점을 연결하는 직선구간으로 구성되며, 철탑의 경로점에 서는 호버링하면서 철탑, 애자 및 금구류를 정밀 촬영하고, 철탑 사이의 경간을 비행할 때에는 7-10 m/sec의 빠른 속도로 비행하면 서 선로 및 주변환경을 전체적으로 관찰하면서 주변 상황에 변화 는 없는지 이상유무를 감시한다. Fig. 7은 순시 작업을 위한 실제 비 행경로 사례이다.
C. Vegetation Encroachment Monitoring
전술한 바와 같이 지장수목 특별관리 개소는 별도로 Fig. 8과 같은 3D 라이다 장착 드론을 이용하여 지장수목 발생여부를 점검
Fig. 5. Example of video shot with drone at a lower height than power line.
Fig. 6. Drone flight path for patrol surveillance task.
Fig. 7. Example of drone flight path for patrol surveillance task.
Fig. 8. 3D LiDAR-equipped drone system.
TABLE 1
Separation Distance Between Electric Power Conductor and Vegetation [7]
사용 전압의 구분 이 격 거리 60 kV 이하 2 m 60 kV 초과 2 m에 사용전압이 60 kV를 초과하는 10 kV 또는 그 단수마다 12 cm을 더한 값 이격거리 = 2 + 단수 × 0.12 (m) 단수 = (전압[kV] – 60) / 10
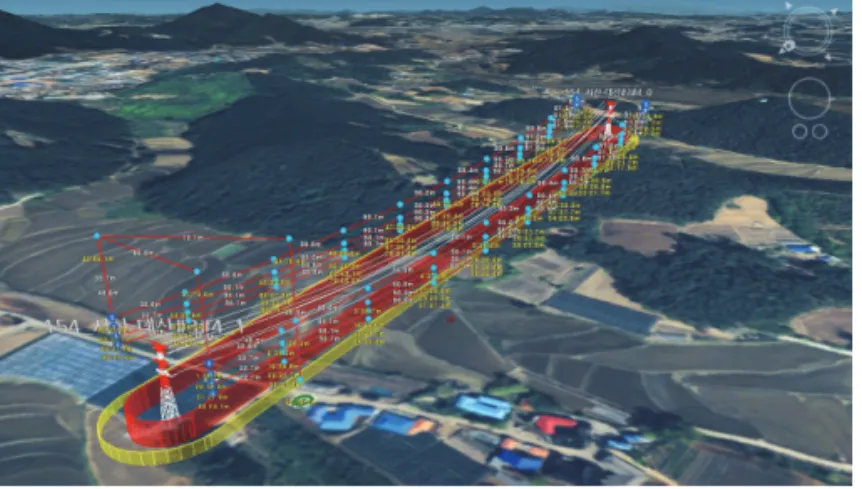
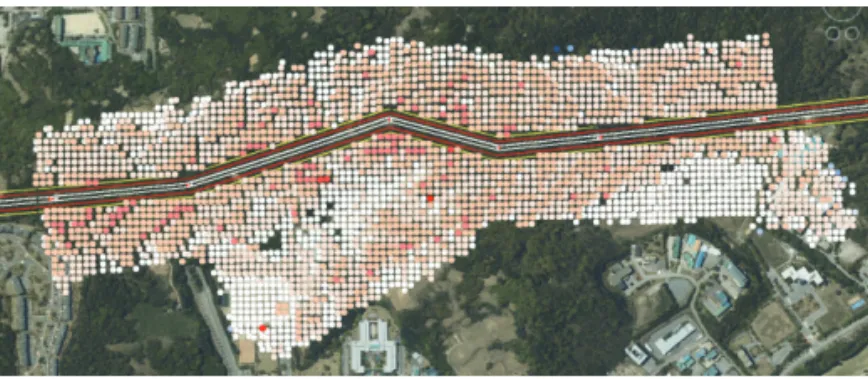
한다. 한국전력공사에서는 수목 침해 판단기준으로 산업통상자원부 의 전기설비기술기준의 판단기준 제133조을 따르고 있다 [7]. 이 기준에서는 TABLE 1과 같이 송전 전압별로 특고압 가공전선과 식 물의 최소 이격거리를 규정하고 있으며, 수목침해 점검결과 전선과 식물 사이의 이격거리가 규정된 최소거리 이하인 경우에는 정전사 고 예방을 위해 지장수목을 벌채해야 한다. 3D 라이다 드론을 활용하여 송전선로와 주변환경 정보를 측 정하는 방식은 순시 작업과 비슷하다. 철탑 높이가 높지 않은 경우 에는 순시 경로와 동일한 비행경로로 비행하되, 영상 촬영을 위해 선로에 수직한 방향을 향하는 정밀 점검이나 순시 작업과 달리, 지 장수목 검출작업에서는 드론이 향하는 방향을 선로와 평행한 방향 으로 설정한다. 765 kV 송전 철탑과 같이 철탑의 높이가 매우 높은 경우에는 장착한 라이다의 측정 가능 범위를 고려하여 가공지선 이상 높이를 연결한 순시 경로 외에 철탑 중단 암 높이를 연결한 비행경로로 한 번 더 비행 측정하여 대상 선로 범위 내에 측정 사 각 지역이 발생하지 않도록 한다. 3D 라이다 드론의 경우에도 보다 정밀한 환경 측정을 위해서는 정밀점검 작업과 같이 “하단선 → 중단선 → 상단선 → 가공지선” 순으로 전체 설비를 따라 비행하 는 비행경로로 수행해도 된다. 비행을 통해 라이다 센서로부터 측정되는 상대 좌표계의 3차 원 점군(point cloud) 데이터는 GPS (Ground Positioning System) 센서로부터 측정되는 드론의 위치 정보 및 IMU (Inertia Measurement Unit)에서 측정되는 드론의 자세 정보와 혼합하여 절대 좌표계에 대한 3차원 점군 맵으로 변환된다 [8]. 또한, 이 과 정에서 상기 변환 과정의 처리 속도를 향상시키기 위하여 확률 기 반의 Down-Sampling 기법인 OctoMap 기법 [9]을 이용하여 유효 데이터 수를 축소함으로써 실시간으로 3차원 점군 맵 생성이 가능 하게 하였다. Fig. 9는 154 kV 서산-대산 T/L의 지장수목 특별관리 개소에 대해 지장수목 검출작업을 수행하기 위한 라이다 드론의 비행경로와 실제 측정된 송전선로와 주변환경을 나타내는 생성된 점군 데이터를 각각 보여준다. 지장수목을 검출하기 위해서는 먼저 전력선의 이도 데이터가 필요한데, 해당 선로의 3차원 점군 맵에 통계기간 신호처리 기법 을 적용하면 점군 맵으로부터 주변환경을 제외한 송전선로만을 별 도로 추출할 수 있고 이 데이터를 활용하여 이도를 계산해낼 수 있다 [8]. 이 때 추정된 이도 값과 점검시 측정한 전력선의 온도 데이터를 기반으로 극한환경 시의 이도를 별도로 계산하고, 전력선 의 이도, 극한환경에서 송전선의 이도, TABLE 1의 이격거리 기준을 이용하여 측정시 및 극한환경 하에서의 지장수목 발생 여부를 진 단한다 [10]. Fig. 10은 Fig. 9(b)에 측정된 3차원 점군 맵에 지장수 목 자동검출 알고리즘을 적용한 결과로, 적색으로 표기된 부분이 정전사고 예방을 위하여 벌채되어야 할 지장수목이 검출된 지점을 나타낸다. (a) (b)
Fig. 9. LiDAR application example. (a) Drone flight path for detecting vegetation encroachment. (b) Side view of the point cloud showing individual conductors, pylons and vegetation from 154 kV Seosan-Daesan transmission line.
Fig. 10. Application result of automatic detection algorithm for vegetation encroachment.
Fig. 11. The concept of drone highway proposed by Amazon (Photo: amazon.com) [11].
III. Public Drone Road 2015년 아마존에서는 미래의 항공도로체계의 일환으로 드론 전용 고속도로를 구상한 내용을 발표하였다 [11][12]. 아마존의 개 념은 500 feet (152 m) 이하의 공역에 초점을 맞추고 있으며, Fig. 11과 같이 크게 4개의 분리된 공역으로 나누고 있다. ① 200 feet (61 m) 이하: 측량 조사, 비디오카메라 촬영, 점검, 소 량 물류운송 등의 저속 구간(Low-Speed, Localized Traffic). ② 200 feet (61 m) - 400 feet (122 m): 고속으로 비행하는 자율비
행 드론(autonomous UAV), 가시권 밖(BVLOS, Beyond the Visual Line of Sight) 비행드론을 위한 고속 구간(High-Speed Transit)으로, 드론간 통신 기능과 장애물 회피 기능을 갖춰야 한다.
③ 400 feet (122 m) - 500 feet (152 m): 비상 상황을 제외하고는 소형 무인드론의 비행이 금지된 구간(No-Fly Zone).
④ 500 feet (152 m) 이상: 항공국(Aviation Authority)에 의해 고 도와 장비 제한이 설정되어 있는 구간(Predefined Low Risk Location). 국내에서는 2016년 7월 국토교통부에서 물류운송, 재난안전, 농업 등 드론의 활용 분야 증가에 따라 안전관리 및 사고예방을 위해 드론을 위한 전용 드론길을 다음과 같이 정의하고 드론길 구 축을 추진한다고 밝혔다 [4]. ※ 드론길: 드론의 안전한 비행에 필요한 ‘3차원 정밀 공간정보’와 ‘비행에 방해되는 장애물 정보’를 포함한 새로운 개념의 3차원 공간정보 기반 의 드론 경로를 의미 국토교통부가 이와 같이 드론길을 도입하게 된 배경은 드론 비행시 현행 2차원 지도만을 이용할 경우에는 드론이 고압선에 걸 리거나 건물에 충돌하는 등 사고 발생 위험이 매우 높기 때문이다. 국토교통부에서는 향후 드론길용 3차원 정밀지도 시범사업 추진을 통해 전국적인 드론길 구축을 위한 구체적인 추진방안 및 3차원 공간 격자망 도입 방안을 연구하고 3차원 공간 격자망 드론길 구 현기술 개발을 함께 추진하겠다고 밝혔다 [4]. ※ 3차원 공간 격자망: 생활공간과 사회, 자연현상 등 자료를 융합해 공간 을 3차원 격자망으로 표현하고, 격자 별로 다양한 정보(드론길 등)를 구축할 수 있도록 구획한 공간정보 모델 (Fig. 12) 하지만, 서론에서 밝힌 바와 같이 국내에서 아직까지 도시 내 고도 150 m 이하의 공간을 최대 두 개의 공역으로 나누는 도시 공간 분할의 초기 모델을 제시하는 연구만 수행되었을 뿐 [5] 드 론길의 구체적인 구현 방법이 제시되지 않았고, 해외에서도 실제로 구현된 사례가 없다. 국내에서 드론길 추진에 있어서 현실적으로 가장 어려운 점은 국토교통부에서 제시한 바와 같이 드론길을 구 현하기 위해서는 지형의 높이 뿐만 아니라 송전탑, 전신주, 고압선 등 장애물 정보가 필요한데 민간에서는 정보보안 차원에서 이러한 정보를 확보하기가 사실상 불가하기 때문이다. 이에 한국전력공사 에서는 보유하고 있는 송전선로 정보와 국토교통부에서 운영하는 공간정보 오픈 플랫폼 지도인 V월드 정보 [13]를 활용하여 물류운 송, 재난안전 등의 공공목적으로 활용 가능한 구체적인 드론길 생 성 방법론을 개발하였다. 전술한 바와 같이 국토교통부에서는 송전탑, 전신주, 고압선 등을 드론 비행에 있어서 장애물로서 고려하고 있다. 하지만, 송전 선로는 전 국토에 광범위하게 걸쳐져 있고 자연환경, 생활환경, 안 전성 등 다양한 요인들을 고려하여 경과지를 선정하였다는 점을 고려하면 [14], 오히려 드론이 송전선로를 따라서 비행할 경우 안 전하게 비행할 수 있다는 점에 착안하여 새로운 드론길 생성 방법 을 고안하게 되었다. 송전선로를 드론이 따라서 비행하는 비행경로로 활용할 경 우 송전선로는 드론길에 있어서 장애물이 아니라 왕복 차선을 나 누는 중앙의 차단막 역할을 할 수 있다. 그런 관점에서 Fig. 13과 같이 송전선로를 기준으로 우측은 가는 방향, 좌측은 오는 방향(우
Fig. 12. The concept of 3D grid-based drone road proposed by MOLIT (Photo: www.molit.go.kr).
측 통행 기준)으로 드론의 운행 방향을 정해주면 다수의 드론이 운행할 경우 서로 충돌할 가능성을 낮출 수 있다. 다음으로 선로를 중심으로 3차원 격자망을 형성하는데 있어 서 격자망과 격자망을 구성하는 기본 격자의 크기를 각각 결정하 고자 하였다. 드론과 관련된 초경량비행장치의 항공안전법 제127 조 제3항 제1호 및 항공안전법 시행규칙 제308조 제6항 제1호/제 2호를 살펴보면 초경량비행장치가 비행가능구역 또는 비행승인을 받은 구역 내에서 국토교통부장관으로부터 별도로 비행승인을 받 지 않고 비행 가능한 고도는 다음과 같다. ① 사람 또는 건축물이 밀집된 지역: 해당 초경량비행장치를 중 심으로 수평거리 150 m (500 feet) 범위 안에 있는 가장 높은 장애물의 상단에서 150 m 이내 ② 그 외 지역: 지표면∙수면 또는 물건의 상단에서 150 m 이내 참고로, 국토교통부령으로 정하는 항공기의 최저비행고도는 항공안전법 시행규칙 제199조에 다음과 같이 정해져 있다. ① 시계비행방식으로 비행하는 항공기 가. 사람 또는 건축물이 밀집된 지역의 상공에서는 해당 항 공기를 중심으로 수평거리 600 m 범위 안의 지역에 있는 가장 높은 장애물의 상단에서 300 m (1,000 feet)의 고도 나. 가목 외의 지역에서는 지표면∙수면 또는 물건의 상단에서 150 m (500 feet)의 고도 ② 계기비행방식으로 비행하는 항공기 가. 산악지역에서는 항공기를 중심으로 반지름 8 km 이내에 위치한 가장 높은 장애물로부터 600 m의 고도 나. 가목 외의 지역에서는 항공기를 중심으로 반지름 8 km 이내에 위치한 가장 높은 장애물로부터 300 m의 고도 송전선로는 사람 또는 건축물이 밀집된 지역을 피해서 건설 되므로, 송전선로 인근에서 드론이 비행 가능한 최대 고도는 지표 면∙수면 또는 물건의 상단으로부터 150 m임을 알 수 있다. 따라서, 이와 같은 법적 제한 조건으로부터 송전선로를 중심으로 좌측, 우 측으로 각각 수직 방향으로 생성되는 격자망의 크기는 150 m × 150 m를 기본으로 정하였다. 다음으로 격자망을 구성하는 기본 격 자(unit grid)의 크기를 결정하기에 앞서 고려해야할 요인이 있다. 송전선로 인근에서는 활선 초고압에 의해 발생하는 자기장 간섭으 로 인해 드론의 자동비행에 필수적인 비행방향 측정용 지자기(컴 파스) 센서가 오동작을 일으켜 드론이 송전설비에 충돌하거나 추 락할 가능성이 있다. 이와 같은 자기장 간섭을 피하기 위하여 한국 전력공사 전력연구원에서는 드론이 송전선로 인근을 비행할 때 345 kV 이하의 선로에서는 선로 중심으로부터 30 m, 765 kV 선로 에서는 45 m의 안전비행 이격거리를 이격하여 비행하도록 하고 있 다 [1]. 전술한 안전비행 이격거리 30 m 또는 45 m, 드론 최대비행 고도 150 m, 그리고 효율적인 알고리즘 적용을 고려하여 단위 격 자의 크기는 Fig. 14와 같이 이 수치들을 모두 표현할 수 있는 15 m × 15 m × 15 m로 결정하였다. 또한, 단위 격자의 색상을 달리하여 지표면, 건물, 자기장 간섭 영역, 비행가능 공역, 비행 경로 등 공 간∙장애물∙경로에 관한 정보를 표현하였다. Fig. 15는 본 연구에서 제안하는 드론길 생성 방법을 개념적 으로 보여준다. Fig. 15와 같이 본 방법론은 한국전력공사의 TOMS (Transmission Operation Management System)가 보유하고 있는 송 전 철탑 정보(가상 철탑)와 국토교통부의 공간정보 오픈 플랫폼
Fig. 14. Size determination for Unit Grid near power transmission line.
Fig. 15. Concept of drone road construction algorithm.
TABLE 2
Comparison Example Between TOMS/V-World Info and Actual Measurement Data by a 3D LiDAR Drone
철탑 GPS좌표 [TOMS] (X, Y) 지형 정보 [V월드] (Z) ( 평균 (m) 표준편차 (m) 최소값 (m) 최대값 (m) 평균 (m) 표준편차 (m) 최소값 (m) 최대값 2.9 3.2 0 7 15.0 9.0 0 65.5 17.8 7.4 0.1 51.5
지도인 V월드 정보(가상 지면)를 기반으로 하고 있다. 하지만, 실 제 송전선로 154 kV 대덕-덕진 T/L 5호-10호에서 철탑의 GPS 좌 표와 지형 높이를 전력연구원에서 개발한 GPS 좌표측정기와 3D 라이다 드론을 활용하여 각각 실측해본 결과, Fig. 16 및 TABLE 2와 같이 실측값과 TOMS/V월드 보유 정보 사이에는 상당한 오차값이 존재하는 것을 확인할 수 있었다. Fig. 16에서 선로 주변에 생성된 단위 격자의 색상이 진할수 록 오차가 크게 발생하는 지점을 나타낸다. 이처럼 좌표와 높이에 오차가 발생하는 원인은 각각 ① 철탑 중심 GPS 좌표 측정시 철탑 구조물에 의한 GPS 수신 간섭과 ② 지형 정보 측정시 발생하는 센 서 오차 및 수목의 성장에 기인한 것으로 보여 진다. 따라서, 가상 철탑과 가상 지면을 기반으로 15 m × 15 m × 15 m 크기의 단위 격 자로 구성된 150 m × 150 m 격자망을 구성하더라도, 이와 같은 철 탑 좌표와 지형 높이에서 발생 가능한 최대 오차를 고려하였을 때 실제 철탑과 실제 지면은 Fig. 15와 같이 좀 더 상부의 다른 위치 에 다른 위치에 존재할 수 있다. 이상의 사실로부터 본 방법론에서는 송전선로를 중심으로 먼 저 150 m × 150 m 격자망을 구성한 후 『① TOMS의 철탑 GPS 좌 표 최대 오차 + ② V월드의 지형 높이 최대 오차 + ③ 자기장 간 섭 영역』을 제외함으로써 드론이 송전선로를 따라 인근에서 비행 가능한 격자망의 유효 공간을 산출하였고, 드론이 공공목적을 수행 하기 위해 비행하게 될 경로점을 안전한 비행이 가능하도록 격자 망 유효 공간의 중심(Centroid)으로 선정하였다. Fig. 17은 154 kV 대덕-덕진 T/L 5호-10호에 대하여 본 연구에서 제안한 드론길 생 성 방법으로 실제 드론길을 생성한 사례를 보여준다. Fig. 17에서 볼 수 있듯이 이와 같은 방법론을 생성된 드론길은 물류배송, 재난 안전(긴급 구조) 등의 공공목적으로 한 드론의 안전한 비행이 가 능하게 해준다. IV. Conclusion 드론 기술이 발전함에 따라 드론 보급이 확대되면서 송전선 로 순시점검에도 점차 활용되고 있다. 하지만, 송전선로는 설비 크 기와 규모가 매우 크고 광범위해서 드론 전문조종사에 의한 수동 조종으로는 드론을 활용한 설비 점검이 사실상 어렵고 위험하기 때문에, 한국전력공사 전력연구원은 GPS 좌표 기반으로 생성된 비 행경로를 자동으로 비행하면서 설비를 점검하는 드론 시스템을 개 활용될 예정이다. 또한, 본 논문에서는 국토교통부에서 발표한 드 론길의 개념을 실제로 구현할 수 있는 3차원 격자망 기반 드론길 생성 방법론을 제시하였다. 이상의 연구 결과는 송전선로의 안정적 운영을 위한 유지보수뿐만 아니라 물류운송, 재난안전 등 다양한 분야에서의 드론 활용 활성화를 통해 신산업 창출에 크게 기여할 수 있을 것으로 기대된다. Acknowledgment
This paper presents the results of “Development of Deep Learning- based Automatic Diagnosis Drone System for Patrol and Inspection of Power Transmission Lines” project supported by 2016 Main R&D Projects performed by Korea Electric Power Corporation. 본 논문은 한국전력공사 2016년도 주력 신규연구개발과제(한 전 전략과제)의 일환으로 한국전력공사 전력연구원이 수행한 "딥 러닝 기반 송전선로 자동진단 드론 운용기술 개발" 과제의 기술개 발 결과임을 밝힌다.
References
[1] Park, J.-Y., Kim, S.-T., Lee, J.-K., Ham, J.-W., Oh, K.-Y., “Method of operating a GIS-based autopilot drone to inspect ultrahigh voltage power lines and its field tests,” Journal of Field Robotics, Vol. 37, Issue 3, pp. 345-361, Apr. 2020, DOI: https://doi.org/10.1002/rob.21916.
[2] S.-T. Kim, J.-Y. Park, J.-K. Lee, I.-H. Choi, J.-W. Ham, “Development of GPS coordinates measuring algorithm for a transmission tower,” KEPCO Journal on Electric Power and Energy, Vol. 3, No. 2, pp. 99-105, Dec. 2017, DOI: https://doi.org/10.18770/KEPCO.2017.03.02.099. [3] 김석태, 함지완, 박준영, 이재경, “드론 비행경로 생성장치 및 방법,” 제
10-2079869호, Feb. 14, 2020.
[4] 국토교통부, 드론 신산업 지원을 위한 3차원 드론길 구축 프로젝트 시작, Jul. 21, 2016. Available at:
http://www.molit.go.kr/USR/NEWS/m_71/dtl.jsp?lcmspage=1&id=9 5077786, Accessed on June, 2020. [5] 김정훈, 김홍배, “드론 도입을 위한 도시 입체계획의 방향과 과제,” 대 한국토∙도시계획학회지 「국토계획」, 제53권, 제1호, pp. 51-61, 2018, DOI: https://doi.org/10.17208/jkpa.2018.02.53.1.51. [6] 가공송전운영업무 기준, 29차 개정, 한국전력공사 송변전운영처, 나주, H0-송변-기준-0002, Jan. 31, 2017. [7] 전기설비기술기준의 판단기준 (제133조), 공고 제2019-195호 개정, 산업통상자원부, 세종, Mar. 25, 2019. [8] 박준영, 오기용, 정시헌, 김석태, 이재경, 김태균, “송전선로 이도 추정 장치,” 10-2018-0139849, Nov. 14, 2018.
[9] A. Hornung, K. M. Wurm, M. Bennewitz, C. Stachniss, W. Burgard, “OctoMap: an effective probabilistic 3D mapping framework based on octrees,” Autonomous Robots, Vol. 34, Issue 3, pp. 189-206, Apr. 2013, DOI: https://doi.org/10.1007/s10514-012-9321-0.
[10] 김석태, 김동근, 김산, 김태균, 박준영, 오기용, 우정욱, 이재경, 이제형, 정시헌, “송전선로의 환경침해 진단장치,” 대한민국 특허, 출원번호 10-2019-0114773, Sep. 18, 2019.
[11] Ryan Mac, Amazon Proposes Drone Highway As It Readies for Flying Fig. 17. Error grid map between V-world info and actual measurement data.