직립자세로부터 보행시작과 천이에
대한 생체역학적 특성 분석
연세대학교 대학원
의 공 학 과
직립자세로부터 보행시작과 천이에
대한 생체역학적 특성 분석
지도 김 영 호 교수
이 논문을 석사 학위논문으로 제출함
2004
년
12
월
일
연세대학교 대학원
의 공 학 과
김 사 엽
김사엽의 석사 학위논문을 인준함
심사위원
인
심사위원
인
심사위원
인
연세대학교 대학원
2004
년
12
월
일
감
감
감
감사
사
사
사의
의
의
의 글
글
글
글
“너너너너는는는는 마마음마마음음을음을을을 다다다다하하여하하여여여 여여여호여호호와호와와와를를를 의를 의의의뢰뢰하뢰뢰하하하고고고고 네네 명네네 명명명철철을철철을을을 의의의지의지지하지하하하지지지지 말말말말라라 너라라. 너너너는는는는 . .“ 3:5~6 범 범 범 범사사에사사에에 그에 그그를그를를 인를 인인인정정하정정하하하라라라라 그그리그그리리리하하하면하면 네면면 네 길네네 길길길을을을 지을 지지지도도도도하하시하하시시시리리리리라라라라 잠잠잠잠 먼저 지금까지 많은 방황과 혼동 가운데 나의 삶을 인도하신 하나님께 감사드 . 립니다 대학원 진학 후 하나님을 인정하고 의지하던 삶을 제대로 영위하지 못했 , . 음에 아쉬움이 많이 남지만 이 과정을 잘 마치게 됨을 하나님께 감사드립니다 대학원 생활동안 항상 새로운 학문 분야에 대한 관심과 기쁨을 심어주신 김영호 . 교수님께 진심으로 감사드립니다 논문의 검토과정에서 많은 지도와 편달을 아끼 . 지 않으신 김한성 교수님과 전혜선 교수님께도 감사드립니다 그리고 항상 학생들 , , , 과 학과의 발전을 위해 수고하시는 윤형로 교수님 이윤선 교수님 이경중 교수님 , , , , , 김동윤 교수님 윤영로 교수님 신태민 교수님 조효성 교수님 김법민 교수님 김 . 경환 교수님께도 감사를 드립니다 또한 연구과정에 많은 조언과 냉철한 판단력을 . , 주셨던 원주대학 송성재 교수님께도 감사드립니다 또한 학교생활에 여러모로 많 . , , 은 도움을 주신 안종수 선생님과 양명배 선생님 이현종 선생님 이미형 선생님 , 김경자 선생님 정세은 선생님 및 모든 연세 의료공학연구원 직원 분들께 감사의 . 말씀을 드립니다 지난 대학원 생활동안 매일 가족보다 더 많은 시간을 함께하며 달려왔던 연구 . 실 식구들에게 감사함을 드립니다 제일 처음 연구실에 연락해서 만나고 소개를 , 해 주었고 생활하는 동안 놀라운 집중력을 보여준 기식이형 다재다능하고 논리적 , , 인 사고를 가진 진복이형 항상 따뜻한 마음을 전하는 든든한 연구실 친구 근이 , 나의 첫 연구실 생활의 조언자며 영리하고 사리분별 정확한 상호 영리하고 깔끔 , 하게 일처리 잘하는 마당발 한일이 힘든 저 학기부터 함께 고생한 창의력이 풍부 , , 하고 무한한 가능성을 가진 영광이 뚝심의 사나이 승찬이 똘똘하고 연구실의 굳 , 은 일들을 열심히 잘 처리하는 성재 아직은 잡일이 많아 조금은 힘들어하는 노력 , 파 희석이 막내로 연구실 지킴이 역할과 분위기 메이커 역할도 잘하며 조금씩 자, 기의 자리를 찾아가는 막내 아가씨 은진이 새롭게 연구실 생활을 시작하는 환준 , . 이 혜란이 등 모든 연구실 식구들에게 감사함을 전해 드립니다 이 못난 막내 때문에 항상 걱정하시고 물심양면으로 도와주신 세상 어느 누구 , 보다 더 사랑하는 나의 가족인 부모님과 형님들 형수님들께 죄송한 마음을 금치 . 못합니다 늘 관심과 애정 그리고 따뜻한 마음으로 잊지 않고 많은 도움을 주셔서 . 항상 감사드립니다 그리고 짧다면 짧고 길다면 긴 과정동안 정말 어려운 환경에 서 불평 없이 묵묵히 나의 등을 밀어주고 응원해 준 정미에게 진심으로 고마움을 . 전합니다 2004년 12월 김 사 엽 드림
차
차
차
차
례
례
례
례
그림 차례 ․․․․․․․․․․․․․․․․․․․․․․․․․․․․․ ⅲ 표 차례 ․․․․․․․․․․․․․․․․․․․․․․․․․․․․․․ ⅵ 국문 요약 ․․․․․․․․․․․․․․․․․․․․․․․․․․․․․ ⅶ 1 제 장 서 론 ․․․․․․․․․․․․․․․․․․․․․․․․․․․․․ 1 2 제 장 방 법 ․․․․․․․․․․․․․․․․․․․․․․․․․․․․ 5 2.1 실험 대상 ․․․․․․․․․․․․․․․․․․․․․․․․․․ 5 2.2 실험 방법 ․․․․․․․․․․․․․․․․․․․․․․․․․․ 5 2.2.1 실험 순서 ․․․․․․․․․․․․․․․․․․․․․․․․ 7 2.2.2 총 압력중심의 이동 ․․․․․․․․․․․․․․․․․․․․ 8 2.2.3 동적 근전도 ․․․․․․․․․․․․․․․․․․․․․․․ 11 3 제 장 결 과 ․․․․․․․․․․․․․․․․․․․․․․․․․․․․ 13 3.1 보행인자 ․․․․․․․․․․․․․․․․․․․․․․․․․․․ 13 3.2 지면반발력 ․․․․․․․․․․․․․․․․․․․․․․․․․․ 17 3.3 총 압력중심의 이동 ․․․․․․․․․․․․․․․․․․․․․․ 24 3.4 관절운동각도 ․․․․․․․․․․․․․․․․․․․․․․․․․ 27 3.4.1 시상면 ․․․․․․․․․․․․․․․․․․․․․․․․․․ 27 3.4.2 관상면 ․․․․․․․․․․․․․․․․․․․․․․․․․․ 333.5 동적 근전도 ․․․․․․․․․․․․․․․․․․․․․․․․․․ 39 3.6 관절모멘트 ․․․․․․․․․․․․․․․․․․․․․․․․․․ 49 3.7 일률 ․․․․․․․․․․․․․․․․․․․․․․․․․․․․․ 55 4 제 장 고 찰 ․․․․․․․․․․․․․․․․․․․․․․․․․․․․ 61 5 제 장 결 론 ․․․․․․․․․․․․․․․․․․․․․․․․․․․․ 64 참고 문헌 ․․․․․․․․․․․․․․․․․․․․․․․․․․․․․ 66 영문 요약 ․․․․․․․․․․․․․․․․․․․․․․․․․․․․․ 69
그
그
그
그림
림
림
림 차
차
차례
차
례
례
례
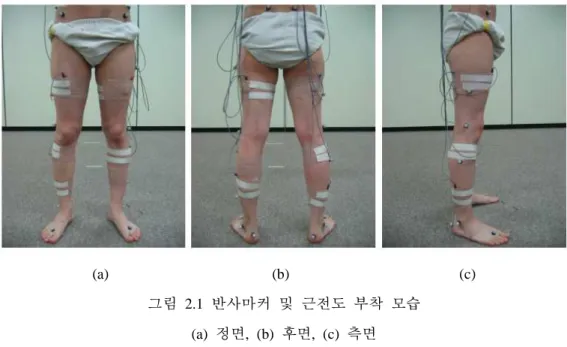
2.1 그림 반사마커 및 근전도 부착 모습 ․․․․․․․․․․․․․․․ 6 2.2 그림 보행시작에 대한 운동 분석을 위한 힘측정판 배열 ․․․․․․․ 7 2.3 그림 정상상태 보행에서 운동 분석된 보행주기 ․․․․․․․․․․․ 8 2.4 AMTI 그림 힘측정판의 압력중심 좌표 구하는 방법 ․․․․․․․․․ 9 2.5 Kistler 그림 힘측정판의 압력중심 좌표 구하는 방법 ․․․․․․․․ 10 3.1 그림 보행시작에서 시간에 따른 양측 하지의 성분별 지면반발력 ․․․ 17 3.2 그림 보행시작과정에서의 구간별 지면반발력 ․․․․․․․․․․․ 21 3.3 그림 보행시작구간에서의 총 압력중심 이동 ․․․․․․․․․․․․․ 24 3.4 그림 보행시작에서의 총 압력중심 이동 ․․․․․․․․․․․․․․․ 25 3.5 · 그림 보행시작에서의 압력중심과 무게중심의 전 후 방향 순간속도 ․․․ 26 3.6 · 그림 보행시작에서의 압력중심과 무게중심의 내 외측 순간속도 ․․․․ 27 3.7 그림 보행시작에서의 시상면 하지 운동각도 ․․․․․․․․․․․․ 29 3.8 그림 보행시작과정에서의 구간별 시상면 하지 운동각도 ․․․․․․․ 32 3.9 그림 보행시작에서의 관상면 하지 운동각도 ․․․․․․․․․․․․․ 35 3.10 그림 보행시작과정에서의 구간별 관상면 하지 운동각도 ․․․․․․․ 38 3.11 (raw data) 그림 보행시작에서 측정된 근전도 신호 ․․․․․․․․․․ 413.12 그림 보행시작에서 하지 근육의 동적 근전도 ․․․․․․․․․․․ 42 3.13 그림 보행시작과정에서 하지 근육의 구간별 동적 근전도 ․․․․․․ 46 3.14 그림 보행시작에서의 시상면 하지 관절 모멘트 ․․․․․․․․․․ 49 3.15 그림 보행시작과정에서의 시상면 하지 관절 모멘트 ․․․․․․․․ 52 3.16 그림 보행시작에서의 하지 관절 일률 ․․․․․․․․․․․․․․․ 55 3.17 그림 보행시작과정에서의 하지 관절 일률 ․․․․․․․․․․․․․ 58
표
표
표
표 차
차
차
차례
례
례
례
2.1 표 피실험자의 일반적 특성 ․․․․․․․․․․․․․․․․․․․․ 5 3.1 표 보행시작에서 양측 하지의 구간별 보행인자 평균값 ․․․․․․․ 14 3.2 표 정상상태 보행인자 평균값 ․․․․․․․․․․․․․․․․․․․ 14국
국
국
국 문
문
문
문 요
요
요
요 약
약
약
약
직
직
직
직립
립
립
립자
자
자세
자
세
세
세로
로부
로
로
부
부
부터
터
터 보
터
보
보행
보
행시
행
행
시
시작
시
작
작
작과
과
과 천
과
천이
천
천
이
이
이에
에
에
에 대
대
대
대한
한
한
한
생
생
생
생체
체
체
체역
역
역
역학
학
학적
학
적 특
적
적
특
특성
특
성
성
성 분
분
분
분석
석
석
석
, , 본 연구에서는 동기화된 삼차원 동작분석시스템 힘측정판 동적근전도 측정시 스템을 이용하여 보행시작 과정에서 일어나는 생체역학적 특성을 정상상태 보행 , . 과 비교 분석하였다 양측 하지의 첫 발을 내딛는 보행시작구간은 정상상태 보행과는 달리 정적 기 . 립상태에서 보행을 시작하여 완전한 하나의 보행주기를 구성하지 못하였다 따라 서 보행속도가 느리고 보장과 활보장이 짧으며 다음 초기접지기까지 발을 내딛는 . 데 걸리는 시간도 길었다 이 구간에서의 보행속도는 정상상태 보행과 큰 차이가 . 있었으나 보장과 활보장은 큰 차이가 없었다 관절운동은 정적 기립상태에서 시작 , 하여 정상상태 보행과 전혀 다른 형태를 보였고 운동각도 범위는 정상상태 보행 보다 작았으나 입각하지 발목관절과 유각하지 엉덩관절의 운동각도 범위는 정상 . 상태 보행보다 컸다 또한 입각하지의 발가락들림기부터 정상상태 보행과 유사한 . 형태가 나타났다 지면반발력은 유각하지에서 먼저 증가하였다가 감소하면서 입각 하지가 증가하였는데 압력중심이 유각하지에서 입각하지로 이동할 때 생성된 지 면반발력의 정점은 작았으나 이후 지면을 밀어 보행속도를 급격히 증가할 때 생 성된 지면반발력은 정상상태 보행에 근접하여 지면반발력은 입각하지의 보행시작 . 구간부터 정상상태 보행에 근접하였다 양측 하지의 첫 번째 보행주기에서 보행속도가 크게 증가하였고 활보시간도 급 . 격히 감소하였다 반면 보장과 활보장과 같은 공간적 보행인자는 보행시작구간과 . 큰 차이는 없었고 조금씩 증가하여 정상상태 보행에 근접하였다 관절운동은 정상 상태 보행에 근접하였으나 유각하지의 첫 번째 보행주기에서는 정상상태 보행보 다 입각기가 길어 전반적인 관절운동의 움직임은 비슷하였지만 운동각도가 정상. 상태 보행보다 조금씩 지연되어 나타났다 지면반발력은 관절운동각도와 달리 형 태에 비교적 차이가 컸으며 특히 초기접지기에서 말기입각기 사이의 차이가 두드 러지게 나타났고 전유각기에서의 지면반발력 정점은 정상상태 보행에 유사하게 . 근접하였으나 지연되어 나타났다 모멘트와 일률은 관절운동각도와 같이 전반적인 . 형태와 극점값은 정상상태 보행과 비슷하나 지연되어 나타났다 입각하지의 첫 번 . 째 보행주기에서는 정상상태 보행에 유사하게 근접하였다 관절운동은 유각하지의 첫 번째 보행주기부터 정상상태 보행에 도달한 반면 지면반발력은 입각하지의 첫 . 번째 보행주기에서도 정상상태 보행과 차이가 컸다 초기접지기에서 중간입각기 사이의 지면반발력의 차이는 여전히 컸으나 전유각기에서 나타나는 반발력의 정 . · 점은 정상상태에 근접하였다 하지만 양측 하지의 내 외측 성분은 모두 정상상태 . 보행과 전반적인 형태도 다르며 값도 정상상태 보행에 크게 미치지 못했다 모멘 트와 일률은 관절운동각도와 같이 전반적인 형태와 극점값은 정상상태 보행과 비 . 슷하나 중간입각기에서의 발목과 무릎관절이 지연되어 나타났다 20 본 연구에서는 대의 건강한 성인을 대상으로 동기화된 삼차원 동작분석시스 , , 템 힘측정판 동적근전도 측정시스템을 이용하여 보행시작 과정에서 나타나는 생 체역학적 특성을 이해하고 정적 기립상태에서 입각하지의 두 번째 초기접지기까 (four step) , , 지 연속되는 네 개의 보 를 측정하여 압력중심의 이동 보행인자 관절각 , , 도의 변화 모멘트 일률 등을 해석하여 정상상태 보행에 이르는 과정에서의 특성 . 을 관찰하였다 또한 보행시작과정을 네 개의 구간으로 정의하여 각 구간의 보행 , , , 인자 관절각도의 변화 모멘트 일률 등을 정상상태 보행의 각 결과들과 비교하여 . 정의된 네 개의 구간 내에서 정상상태 보행에 도달하는지 살펴보았다 핵심이 되는 말: 보행시작, 정상상태 보행, 운동학, 운동역학, 동적 근전도, 총 압력중심의 이동
1
제
제
제
제
장
장 서
장
장
서
서 론
서
론
론
론
(gait initiation) (quiet standing)
보행의 시작 은 정적 기립 상태에서 시작하여 일정
(steady-state walking) (transition) .
한 보행양상 을 보일 때까지의 변화 를 말한다
서 있는 상태에서 발목을 중심으로 유지되던 무게 중심을 깨고 앞으로 이동시 키는 보행시작 과정은 무의식적으로 일어나는 간단한 움직임으로 흔히 인식되고 있지만 실제로 보행시작은 수많은 신경과 생체역학적인 힘의 복합적인 통합에 의
[1]. (ground reaction force)
해 이루어진다 정적 기립상태에서 지면 반발력 의 작용선
(foot length) 24% , (coronal plane)
은 발길이 의 앞쪽 정도 지점에 위치하며 관상면 에 . 서 관찰했을 때 발목관절 중심의 외측에서 내측으로 작용하고 있다 정적 기립상 태에서 지면 반발력의 작용으로 발목과 무릎관절에는 굴곡 모멘트가 작용하고 엉 . 덩관절에는 약하지만 신전 모멘트가 작용한다 이와 같이 하지 관절에 작용하는 (extensor) 모멘트에 정적 기립상태를 유지하기 위해 발목과 무릎 관절에는 신전근 . (agonist) 이 활성화된다 또한 체중심의 안정적인 균형은 각 관절의 주동근 과 길항 (antagonist) (interaction) . 근 의 상호작용 에 의해 유지된다 정적 기립상태에서 장딴지근
(gastrocnemius)과 넙다리곧은근(rectus femoris), 넙다리두갈래근(biceps femoris)이 활
(activation) .
성화 되어 있다 보행시작을 위해 장딴지근과 넙다리두갈래근은 비활성화
(deactivation)되고 앞정강근(tibialis anterior)이 활성화된다[2]. 또한 앞정강근의 활성
. 화 직후 넙다리곧은근이 활성화되어 발을 들어올려 보행을 시작한다 따라서 이들 , 중 어느 하나라도 문제가 발생되면 보행시작 과정에 이상이 나타나며 특히 신경 계 질환이 있는 경우 몸의 안정적인 균형을 유지하기가 매우 힘들어 낙상사고가 . 일어나고 있다 보행시작 과정에 있어서 자주 일어나는 낙상은 주로 신체노화와 . 질병으로 인한 균형조절능력의 감소를 가장 큰 원인으로 보고 있다 (musculo-skeletal 자세균형을 유지하기 위한 필요한 요소들은 크게 근골격계 요소 components)와 신경계 주요 요소로 나눈다 근골격계 요소는 관절 가동범위 근육. , , . 의 특성 결합된 체절사이의 생체역학적인 관계 등을 포함한다 신경계의 주요 요
(neuromuscular response synergy) (motor
process)과 시각(visual), 전정계(vestibular system) 및 체성감각계(somatosensory
system)와 같은 감각 작용(sensory process), 균형유지를 위해 선행 기전과 적응 기
. 전의 상호 작용 등 세 가지 작용의 복합적인 과정에 의해 이루어진다 정적 기립 상태에서 자세 흔들림과 균형조절능력에 대한 분석은 신경계 질환과 [3], 균형을 평가하는 방법으로 이용되고 있으며 자세 흔들림 정도는 신경계 질환 및 근골격계 질환과 노화로 인한 자세 불안정 때문이라는 연구결과가 발표되었다 [4]. 선행 연구에 따르면 65세 이상 노인의 30~50% 이상이 매년 1회 이상 넘어짐 40% [5]. 을 경험하고 있으며 이들 중 다시 넘어짐을 경험하는 사람이 이상이다 넘 , 어짐은 외상 골절 등의 합병증을 유발하고 일상생활에서 환자의 재활의욕을 저하 , , 65 시키며 사망을 초래하기도 하는데 세 이상의 노인들이 넘어짐으로 인하여 매 10,000 [6]. 년 명 이상 사망한다 넘어짐은 노인보다 환자들에게 있어서 더욱 심각한 . 문제가 된다 일반 재활병동에서 낙상의 가장 위험한 질환군이 뇌졸중과 절단 환 [7], 35% 자이며 여러 질환군 중 편마비 환자가 전체 낙상 환자의 로 질환군 중 가 [8]. 장 높은 비율을 차지한다고 발표되었다 편마비 환자들의 낙상은 자발적 근육수 , 축능력의 감소와 부적절한 근육의 활성 조절 지각 및 인지능력의 저하 등에 의해 , [9]. 발생되며 주로 첫 발을 내딛는 보행시작 과정에서 나타난다 이와 같이 환자 10% 뿐 아니라 노인에서 넘어짐을 경험한 사람의 가 골절상 또는 다른 질병을 겪 [10], 4 게 되며 이러한 넘어짐을 경험할 확률은 여성이 남성에 비해 배 이상 높다 [11]. 노인층과 신경계 질환 환자들의 급격한 증가로 인해 이러한 수치들은 계속 , 증가하고 있으며 그들 중 보행시작에서 발생하는 낙상사고 또한 증가하고 있는 추세이기 때문에 보행시작과정의 여러 측면을 이해하면 낙상의 발생기전과 예방 . 방법 뿐 아니라 병적 보행의 운동장애 원인을 찾아내는데 기여할 수 있을 것이다 Carlsoo[12]에 의해 힘측정판과 근전도 분석을 이용한 보행시작에 대한 연구가 . Mann [1] 8 본격적으로 시작되었다 등 은 힘측정판과 개 근육의 근전도를 측정하여
(center of pressure, COP)
압력중심 이 초기에 유각하지의 외측 후방으로 이동한다는 . 사실을 알게 되었다 유각하지로 이동하였던 압력중심이 입각하지로 이동할 때 전 (peroneal muscle) 방 이동이 동시에 일어나는데 그 원인을 비골근 의 활동에 의한 것 이라는 사실을 밝혀냈으나 압력중심이 내 외측으로 이동하는 힘의 원인이 무엇인
.
지는 밝혀내지 못했다 또한 해석 과정에서 압력중심의 내 외측 및 전 후 방향 이
(center of mass, COM) (projection) .
동이 질량중심 의 투영 과 같다는 오류를 범했다
Herman과 Cook 등[13]은 9개 근육의 근전도와 2개의 힘측정판 전기측각기 등을,
(restrain of ankle motion)
이용하여 청년군을 대상으로 발목운동의 제한 을 위해 제작
(ankle foot orthosis) (xylocaine)
된 발목 보조기 를 착용하고 실로카인 을 이용한 경골
(tibial nerve suppression)
신경 제약 실험을 수행하였으며 중추운동 프로그래밍에 대 . Cook Cozzens [14] 한 분석을 통해서 보행시작에 관한 연구에 기여하였다 과 등 은 (tibialis anterior) 청년군을 대상으로 근전도 측정을 통해 앞경골근 의 활동이 보행시 . Brenier [15-17] 작 속도의 증가와 함께 증가한다고 하였다 등 은 힘측정판을 이용하 (center of gravity) 여 정적 기립 상태에서 보행을 시작하는 과정에서의 무게중심 이
. (normalized) (shear forces)
동을 분석하였다 실험을 통해 체중으로 정규화 된 전단력
. Brunt 이 질량중심의 내 외측 및 전 후 방향 가속도와 같다는 사실을 알아냈다
[2]
등 은 힘측정판과 두 개의 근전도 채널을 이용하여 보행속도에 따라 지면반발력
(tibialis anterior), (gastrocnemius)
과 앞경골근 장딴지근 의 근수축 개시와 종료시간을 . 입각하지의 발가락들림기까지 분석하였다 지금까지 대부분의 연구는 주로 지면반 , , , 발력 압력중심의 이동 하지 각 관절의 각도변화 동적 근전도 등을 측정하여 얻 , 은 체중심의 속도와 가속도 궤적 등을 이용하여 정적 기립 상태에서 유각하지와 [18-20]. 입각하지의 첫 번째 발가락들림기까지의 보행시작 과정을 설명하였다 그러 나 보행시작과정 전체를 해석하기 위해서는 정적 기립 상태에서 보행이 정상상태
(steady-state walking speed)에 이를 때까지를 측정해야 되지만 기존 연구에서는 힘,
측정판 수의 제한으로 인해 양하지의 첫 번째 발가락들림기까지만 측정이 가능하 . 여 보행시작과정 전체에 대한 해석이 불가능하였다 이에 따른 문제점을 극복하기 Breniere [15] 위한 노력으로 등 은 청년군을 대상으로 한 개의 힘측정판을 이용하여 보행속도에 따른 압력중심과 질량중심의 이동변위를 유각하지의 발가락들림기까 (duration of gait initiation) (one step)
지 분석하여 보행시작기간 은 한 보 정도만 지속
(2nd step)
되어 두 번째 보 부터 보행시작이 끝나고 정상상태 보행이 시작되는 것으
.
로 예상하였다 따라서 정상상태의 보행속도에 도달하기 위해서는 적어도 두 보
[14] . Jian [21]
등 의 예측과 상반된 결과를 제시하였다 그 후 등 은 네 대의 비디오
카메라와 세 개의 힘측정판을 이용한 보행시작 실험에서 유각하지의 첫 번째 발
, , (gait
가락들림기까지 질량중심의 변위 속도 가속도를 분석하여 보행시작과정
initiation process)에서 정상상태 보행(steady-state walking)으로 진행하는 과정을 예
. (end of the
측하려고 하였다 그들은 실험을 통해 유각하지의 첫 번째 초기접지기
first step)에서 질량중심(COM)의 속도가 정상상태 보행 속도의 90%에 도달한다는
(2nd step)
사실을 제시하여 보행시작 후 두 번째 보 에서 정상상태 보행에 도달함을
.
보였다 하지만 이 연구들은 보행시작과정에서 입각하지 발가락들림기까지의 총
(net COP) (COM)
압력중심 과 질량중심 에 대한 속도 데이터만 이용하여 정상상태 보 행에 대한 보행시작과정의 예측만 가능하였을 뿐만 아니라 보행시작 후 양측 하 , 지의 그 다음 보행주기에서의 지면반발력과 모멘트 일률 등에 대한 해석도 불가 . 능하였다 또한 이 두 가지 결과 데이터만 이용하여 보행시작이 정상상태 보행에 근접하고 있다는 결론으로는 보행시작과정에 대한 다른 생체역학적 특성이 고려 . 되지 않은 것으로 정상상태 보행과 직접적으로 비교할 수 없다 20 본 연구에서는 대의 건강한 성인을 대상으로 동기화된 삼차원 동작분석시스 , , 템 힘측정판 동적근전도 측정시스템을 이용하여 보행시작 과정에서 일어나는 자 세균형의 기전과 생체역학적 특성을 이해하기 위해 정적 기립상태에서 입각하지 (four step) 의 두 번째 초기접지기까지 연속되는 네 개의 보 를 측정하여 압력중심의 , , , , 이동 보행인자 관절각도의 변화 모멘트 일률 등을 해석하여 정상상태 보행에 . 이르는 과정에서의 특성을 관찰하고자 한다 또한 보행시작과정을 네 개의 구간으 , , , 로 정의하여 각 구간의 보행인자 관절각도의 변화 모멘트 일률 등을 정상상태 보행의 각 결과들과 비교하여 정의된 네 개의 구간 내에서 정상상태 보행에 도달 . 하는지 살펴보고자 한다
2
제
제
제
제
장
장 방
장
장
방
방 법
방
법
법
법
2.1 실
실
실
실험
험
험 대
험
대
대상
대
상
상
상
20 본 연구에서는 신경계 또는 근골격계에 병력이 없는 건강한 성인 남자 명을 ( 2.1). 피실험자로 선정하였다 표 2.1 ( 표 피실험자의 일반적 특성 N=20) ± 평 평 평 평균균균균 편편차편편차차차 범범범범위위위위 나이 (세) 24.6 ± 2.01 21 ~ 28 키 (㎝) 174.2 ± 4.45 166.5 ~ 183 몸무게 (㎏) 70.3 ± 5.82 63.0 ~ 84.0 골반길이 (㎝) 26.2 ± 1.61 23.4 ~ 28.6 다리길이 왼쪽 (㎝) 87.5 ± 4.14 82.0 ~ 94.3 오른쪽 (㎝) 87.3 ± 4.46 81.3 ~ 95.3 무릎너비 왼쪽 (㎝) 9.53 ± 1.10 8.1 ~ 11.6 오른쪽 (㎝) 9.56 ± 0.98 7.9 ~ 11.4 발목너비 왼쪽 (㎝) 6.60 ± 0.35 6.1 ~ 7.1 오른쪽 (㎝) 6.47 ± 0.39 5.9 ~ 7.02.2 실
실
실
실험
험
험 방
험
방
방법
방
법
법
법
(steady-state walking) 정적 기립 상태에서 보행을 시작하여 정상상태 보행 에 이르(near infra-red camera)
는 과정을 측정하기 위해 여섯 대의 적외선 카메라 와 네 개
(2 AMTI force platforms, Watertown, MA, USA, 2 Kistler force
의 힘측정판
(VICON 612 Motion Analysis System, Oxford Metrics, UK) 석시스템 에 동기화하여 (synchronize) 사용하였다. (a) (b) (c) 2.1 그림 반사마커 및 근전도 부착 모습 (a) 정면, (b) 후면, (c) 측면 , 2.1 관절의 삼차원적 운동을 측정하기 위하여 그림 과 같이 피실험자의 위앞엉
(anterior superior iliac spine), (posterior superior iliac spine),
덩뼈가시 위뒤엉덩뼈가시
(thigh), , (tibia), (lateral malleolus),
대퇴 무릎관절 정강뼈 발목관절의 가쪽복사뼈 둘째
(second metatarsal head), (heel) 16
발허리머리 발뒤꿈치 등의 해부학적 위치에 개의
14mm 반사 마커(reflective marker)를 Davis 프로토콜[22]에 따라 부착하여 하지분절
, (net COP) 4
의 운동을 관찰하였고 총 압력중심 의 이동은 개의 힘측정판에서 지면
MATLAB 6.5(Mathworks Inc., USA)
반발력 데이터를 획득하여 상용프로그램인 를
. (dynamic electromyogram)
이용하여 계산하였다 하지관절의 동적 근전도 활동은 양
(tibialis anterior), (gastrocnemius), (rectus
측 하지의 앞경골근 장딴지근 넙다리곧은근
femoris), 넙다리두갈래근(biceps femoris), 중간볼기근(gluteus medius)에 5개 근육에
10 (surface electrode) .
총 개의 표면전극 을 부착하여 관찰하였다
2.2 4 (Force plate 1, 2, 3, 4)
(gait cycle)
을 배치하여 각 하지에 대해서 두 개의 보행주기 에 해당하는 운동학적
데이터를 측정할 수 있도록 함으로써 보행시작과정에서의 생체역학적 특성을 관
. ( A, B, C, D)
찰하였다 측정된 네 개의 보행주기 구간 에서 각 보행주기와 정상상태
(steady-state walking) (upright standing posture)
보행 을 비교하여 정적 기립상태 에서 정
(steady-state walking speed) .
상상태 에 이르는 과정을 확인하고자 하였다 Swing limb Stance limb
Walk way
B
B
B
B
C
C
C
C
Force Plate 3 Force Plate 4A
A
A
A
D
D
D
D
Initiation period ; A, B
1
stgait cycle ; C, D
Force Plate 1 Force Plate 2 Swing limb Stance limbWalk way
B
B
B
B
C
C
C
C
Force Plate 3 Force Plate 4A
A
A
A
D
D
D
D
Initiation period ; A, B
1
stgait cycle ; C, D
Force Plate 1 Force Plate 2 2.2 그림 보행시작에 대한 운동 분석을 위한 힘측정판 배열 2.2.1 실험 순서 10 15 실험 순서는 정상상태 보행을 회 측정한 후 보행시작 실험을 회 측정하였 . 2.3 10m (walk way) 다 정상상태 보행은 그림 과 같이 의 보행로 를 걷는 중 정상상 태 보행속도에 도달한 하나의 보행주기를 측정한 것으로 그 평균값을 보행시작 . 실험의 대조군 값으로 사용하였다 모든 피검자는 정상상태 보행과 보행시작 실험 전 자연스러운 보행을 유도하기 위해 각 과제에 익숙해질 때까지 충분한 연습을 . 실시한 후 측정을 하였다 보행시작 실험은 임의의 반응신호에 따라 보행을 시작하지 않고 피실험자가 준 비되었을 때 편안한 속도로 출발하도록 하여 각 피검자의 보행시작에서 나타나는 . 고유한 생체역학적 특성을 측정하였다 보행을 시작할 때 먼저 내딛는 발을 유각(swing limb), (stance limb) ,
하지 나중에 내딛는 발을 입각하지 로 정의하였으며 양측
2
하지의 보행구간을 각각 정적 기립 상태에서 시작하여 개의 보행주기를 시간 순
4 ( 2.2).
힘측정판 위에서 가만히 서 있는 상태에서 체중심의 이동 또는 지면반발력의 변 (onset of gait initiation) 화에 따라 압력중심이 이동하기 시작하는 시점을 보행시작
A ,
으로 정의하여 유각하지의 첫 번째 초기접지기까지를 구간 로 동일한 발의 그
1 (gait cycle) C .
다음 개의 보행주기 를 구간 로 정의하였다 유각하지와 마찬가지로
(onset of gait initiation)
입각하지는 보행시작 시점 에서 입각하지의 첫 번째 초기접 B , 1 D . 지기까지를 구간 로 그 다음 개의 보행주기를 구간 로 정의하였다 이 때 구 A B 간 와 구간 는 정적 기립 상태에서 시작하여 완전한 하나의 보행주기를 구성하 (gait 지 못하기 때문에 이 두 구간을 각각 유각하지와 입각하지의 보행시작구간 initiation period)으로 정의하였다 또한 구간. C와 구간 D는 각 하지의 첫 번째 보 행주기에 해당하기 때문에 각각 유각하지와 입각하지의 첫 번째 보행주기로 정의 . 하였다 Swing limb Stance
limb Force Plate 3
Force Plate 4
One gait cycle
Force Plate 1 Force Plate 2
Normal
steady-state walking
Walk way
Swing limb Stancelimb Force Plate 3
Force Plate 4
One gait cycle
Force Plate 1 Force Plate 2
Normal
steady-state walking
Walk way
2.3 그림 정상상태 보행에서 운동 분석된 보행주기 Force Plate 1 2 보행시작 실험은 피실험자가 과 에 각각 한 발씩 올려놓고 있다 “ ” 가 지시자의 준비 음성신호 후에 피실험자의 의지에 따라 보행을 시작하여 입각 (initial contact) ( 2.2). 하지의 두 번째 초기접지기 까지 측정하였다 그림 본 실험에서 는 왼발을 유각하지로 선택하도록 보행시작 실험 전에 피검자에게 지시하고 실험 , 15 10 에 임하였으며 총 회 이상 측정하여 그 중 회 시도한 것의 평균값을 이용하 . 였다 보행시작 전 오른발을 유각하지로 선택하여 출발한 것과 왼발을 유각하지로 Hesse [23] 선택하여 출발한 것이 상호 유의한 차이가 없다는 결과는 등 에 의해 검. 증된 바 있다 2.2.2 총 압력중심의 이동 본 연구에서 사용된 힘측정판은 두 가지 종류로 각각의 압력중심 좌표 구하는 . 방법을 나타낸 것이다
Z
Y
X
xF
yF
zF
yM
xM
zM
Z
Y
X
xF
yF
zF
yM
xM
zM
2.4 AMTI 그림 힘측정판의 압력중심 좌표 구하는 방법 2.4 AMTI 그림 는 힘측정판에서 압력중심의 좌표를 구하는 방법을 나타낸 것이 . 다 힘측정판에서 측정되는 각성분의 힘을 각각
,
,
라고 정의하면 수직모 (2.1) ~ (2.4) . 멘트와 압력중심은 식 식 를 통하여 구할 수 있다
(2.1)
(2.2)
(2.3)
(2.4)
, , : scale factors to convert forces from voltages
,
,
: scale factors to convert moments from voltagesZ
Y
X
4F
3F
2F
1F a
b
Z
Y
X
4F
3F
2F
1F a
b
2.5 Kistler 그림 힘측정판의 압력중심 좌표 구하는 방법 2.5 Kistler 그림 는 힘측정판에서 압력중심의 좌표를 구하는 방법을 나타낸 것이 . 다 네 모서리의 수직성분의 힘을 각각
,
,
,
라고 정의하면 수직합력과 (2.5) ~ (2.10) . 압력중심은 식 식 을 통하여 구할 수 있다
(2.5)
(2.6)
(2.7)
(2.8)
(2.9)
(2.10)(double limb support period)
두 발이 지면에 닿는 양하지지지기 의 경우 해당되는 (net 두 개의 힘측정판에서 측정된 데이터를 이용하여 아래와 같이 총 압력중심 COP)을 구할 수 있다.
(2.11)
; center of pressure under swing limb
; center of pressure under stance limb
; vertical ground reaction force under swing limb
; vertical ground reaction force under stance limb
는 두 개의 힘측정판 각각의 수직성분 지면반발력과 압력중심 좌표 . 를 이용하여 양하지지지기 구간의 총 압력중심의 이동을 구할 수 있다 (single limb 보행을 시작하여 걸어가는 동안에는 양하지지지기와 단하지지지기 support period)가 교차하며 하나의 보행주기를 구성하게 되는데 단하지지지기에는해당되는 힘측정판의 압력중심을 그대로 양하지지지기 사이에 넣어 전체 총 압력 .
중심의 이동 궤적을 구할 수 있다 4
본 연구에서는 개의 힘측정판에서 얻은 지면반발력 데이터 중 각 힘측정판에
(vertical reaction force) (center of pressure, COP)
서 얻은 수직 반발력 과 압력중심 데
(2.11)
이터를 이용하여 보행시작부터 입각하지의 두 번째 발가락들림기까지 식 을
MATLAB 이용하여 총 압력중심의 이동 궤적에 대한 계산을 상용프로그램인
6.5(Mathworks Inc., USA)를 이용하여 구하였다.
2.2.3 동적 근전도
보행시작과정에서 측정된 동적 근전도 신호에 대한 계산은 상용 프로그램인
MATLAB 6.5(Mathworks Inc., USA)를 이용하여 구하였다 측정된 근전도 데이터는.
(Butterworth 4 30-500 ) 100ms
대역통과 필터 차 ㎐ 를 사용하여 잡음을 제거한 후 간
(route mean square, RMS) .
격으로 평균제곱근 값을 얻었다 계산된 평균제곱근 값은
(inter-subject)
피검자간 근전도 신호의 평균값을 구하기 위해 보행시작에서 동기화
(synchronized) 되어 측정된 힘측정판 데이터를 이용하여 전체 피검자의 초기접지
(initial contact) (toe off) .
기 와 발가락들림기 시간의 평균값을 먼저 구하였다 이 평균 8 값을 이용하여 전체 보행시작과정을 시간에 따라 개의 구간 나눠 피검자간 (inter-subject) 근전도 신호의 평균값을 구하여 보행시작에서의 보행특성에 대해 설 . 명하였다
3
제
제
제
제
장
장 결
장
장
결
결 과
결
과
과
과
3.1 보
보
보
보행
행
행인
행
인
인
인자
자
자
자
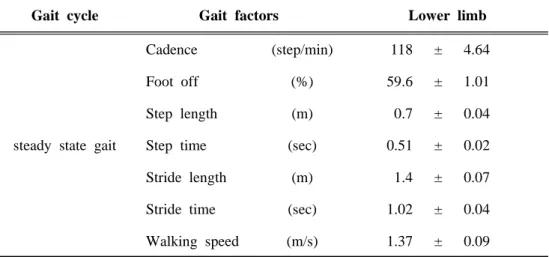
3.1 3.2 (lower extremity) 표 과 는 보행시작과정에서 양측 하지 의 구간별 보행인자(gait factor) 평균값과 정상상태 보행(steady-state walking)의 보행인자 평균값을 나
. A, B, C, D 4 (gait 타낸 것이다 구간 로 정의된 개의 구간을 각 하지의 보행주기 cycle)별로 나누어 정리하였다 이 때 정적 기립상태에서 시작하여 완전한 하나의. A B (gait 보행주기를 구성하지 못하는 구간 와 구간 를 같이 묶어 보행시작구간 initiation period)으로 정의하였고 구간, C와 구간 D를 같이 묶어 각각 유각하지
(swing limb)와 입각하지의(stance limb) 첫 번째 보행주기로 정의하였다 보행인자.
(gait initiation period) (cadence)
에서 제시된 것 중 보행시작구간 에서의 분속수 는 보 A B (step length) 행이 진행되는 구간 와 에서 보장 이 점차 증가하며 변하기 때문에 보행시작구간의 분속수와 정상상태 또는 양측 하지의 첫 번째 보행주기에서 제시 된 분속수와 서로 비교할 수 없기 때문에 보행시작구간에서의 분속수는 제외하였 . 다 양측 하지의 보행시작구간에서 첫 번째 보행주기로 진행됨에 따라 보행인자 (steady-state walking) 3.1 3.2 평균값이 정상상태 보행 에 점차 근접하고 있음을 표 과 . (stride) 에서 확인할 수 있다 보행시작과 함께 활보 가 진행됨에 따라 보장이나 활 (stride length) 보장 은 보행시작구간과 첫 번째 보행주기가 서로 큰 차이를 보이지는 , (walking speed) 않고 점차 증가하는 추세를 보였으나 보행속도 는 보행시작구간과 (stride 첫 번째 보행주기 사이에 큰 차이를 보이며 급격히 증가한 반면 활보시간
time)은 급격히 감소하였다 각 보행주기 내에서 입각기. (stance phase)가 차지하는
비율은 보행시작구간에서 첫 번째 보행주기로 보행이 진행됨에 따라 급격히 감소 ,
하여 정상상태 보행에 근접하였으며 보행시작구간 내에서는 유각하지보다 입각하 .
3.1 (
표 보행시작에서 양측 하지의 구간별 보행인자 평균값 N=20)
Gait period Gait factors Swing limb Stance limb
gait initiation period
Foot off (%) 71.6 ± 2.44 78.0 ± 1.02
Step length (m) 0.6 ± 0.05 0.64 ± 0.03
Step time (sec) 1.39 ± 0.05 0.6 ± 0.03
Stride length (m) 0.61 ± 0.05 1.26 ± 0.05
Stride time (sec) 1.39 ± 0.05 2.0 ± 0.06
Walking speed (m/s) 0.44 ± 0.03 0.63 ± 0.03
1st gait cycle
Cadence (step/min) 105 ± 4.83 112 ± 5.1
Foot off (%) 62.8 ± 1.38 60.6 ± 1.48
Step length (m) 0.69 ± 0.05 0.69 ± 0.04
Step time (sec) 0.54 ± 0.03 0.53 ± 0.03
Stride length (m) 1.35 ± 0.07 1.38 ± 0.07
Stride time (sec) 1.15 ± 0.05 1.08 ± 0.05
Walking speed (m/s) 1.18 ± 0.07 1.28 ± 0.08
3.2
표 정상상태 보행인자 평균값 (N=20)
Gait cycle Gait factors Lower limb
steady state gait
Cadence (step/min) 118 ± 4.64
Foot off (%) 59.6 ± 1.01
Step length (m) 0.7 ± 0.04
Step time (sec) 0.51 ± 0.02
Stride length (m) 1.4 ± 0.07
Stride time (sec) 1.02 ± 0.04
A B
보행시작구간에서 구간 로 정의된 유각하지와 구간 로 정의된 입각하지 사
(stride time)
이에 활보시간 과 보행속도는 큰 차이가 있지만 보행주기에서 입각기
(stance phase)가 차지하는 비율을 나타내는 발가락들림기(foot off), 보장 활보장은,
. ( A) (step length) 서로 큰 차이가 없었다 하지만 유각하지 구간 에서의 보장 과 활보장 (stride length)의 편차는 입각하지 구간( B)나 정상상태 보행과 비교했을 때 비교적 ( A) (step time) 작지만 유각하지 구간 에서의 입각기 혹은 보시간 과 활보시간이 차지 , 하는 비율의 편차는 커 발을 떼는 시간까지의 시간적 인자값은 시도별로 차이가 . 컸지만 그 때의 공간적 이동을 나타내는 인자값의 차는 작았다 입각하지의 보행 ( B) 시작구간 구간 은 보행시작 후 유각하지가 다음 초기접지기를 거친 후 입각하지 , 의 발가락이 들리며 그 후 초기접지기에 도달하기 때문에 활보시간은 길지만 그 동안 체중심이 입각하지로 완전하게 이동되기 때문에 유각하지에 비해 더 큰 추 (step length) . 진력을 얻을 수 있어 보행속도가 더 빠르며 보장 이 더 길다 또한 총 압력중심의 위치가 유각하지 쪽으로 작게 이동한 반면 입각하지 쪽으로 충분하게 . 이동하는 것은 보행인자들이 정상상태 보행에 빠르게 근접하는데 큰 역할을 한다 B C 구간 로 정의된 입각하지의 보행시작구간과 구간 로 정의된 유각하지의 첫 2 , 번째 보행주기 사이에서 보행속도는 배 정도로 급격한 증가를 보였고 입각기가 B C 16.8% 차지하는 비율도 구간 에 비해 구간 에서 정도 감소하여 정상상태 보행 . 에 급격히 근접하였음을 알 수 있다 반면 보장이나 활보장은 두 구간 사이에 큰 차이가 없었는데 이들은 보행시작 후 활보가 점차 진행되어도 큰 차이를 보이며 . A, B, C, 정상상태 보행에 근접하는 것이 아님을 알 수 있다 본 실험에서 측정한 D 4개의 활보 중 구간 B에서 입각기가 차지하는 비율이 가장 커서 활보시간(stride time)이 가장 길었는데 이 시기의 전 후 방향 및 수직 지면반발력을 살펴보면 전,
(shear force) (acceleration force)
후 방향의 전단력 과 추진력 이 그 다음 보행주기인 구 C D . 간 와 구간 뿐만 아니라 정상상태 보행보다 더 큰 경우가 많았다 이 구간에 C 서 생성된 추진력으로 인해 바로 다음 활보인 구간 에서 정상상태 보행에 급격 B 히 근접하여 보행시작과정에 있어 구간 가 중요한 역할을 담당하고 있음을 알 . 수 있었다 C 구간 로 정의된 유각하지의 첫 번째 보행주기에서 정상상태 보행에 급격히 근
, D 접하고 있으나 정상상태 보행 뿐 아니라 구간 로 정의된 입각하지의 첫 번째 보 . 행주기와도 여전히 차이를 보이고 있다 보장과 활보장에는 큰 차이가 없으나 보 . (stance phase) 60.6% 행속도는 계속 증가하고 있다 또한 입각기 는 로 정상상태 보행 (stance phase) 1% 입각기 평균값과 차로 정상상태 보행의 평균값 편차 내에 도달하 ( 였으나 정상상태 보행과 유의한 차이를 보였다
.01).3.2 지
지
지
지면
면
면반
면
반
반
반발
발
발력
발
력
력
력
0.0 0.5 1.0 1.5 2.0 2.5 0 2 4 6 8 10 12 F o rc e ( N /k g ) Time (sec) FP1 FP2 FP3 FP4 0.0 0.5 1.0 1.5 2.0 2.5 -1.0 -0.5 0.0 0.5 1.0 F o rc e ( N /k g ) Time (sec) FP1 FP2 FP3 FP4 0.0 0.5 1.0 1.5 2.0 2.5 -1.5 -1.0 -0.5 0.0 0.5 1.0 1.5 2.0 2.5 F o rc e ( N /k g ) Time (sec) FP1 FP2 FP3 FP4(a)
(b)
(c)
A
B
C
D
A
B
C
D
A
B
C
D
0.0 0.5 1.0 1.5 2.0 2.5 0 2 4 6 8 10 12 F o rc e ( N /k g ) Time (sec) FP1 FP2 FP3 FP4 0.0 0.5 1.0 1.5 2.0 2.5 -1.0 -0.5 0.0 0.5 1.0 F o rc e ( N /k g ) Time (sec) FP1 FP2 FP3 FP4 0.0 0.5 1.0 1.5 2.0 2.5 -1.5 -1.0 -0.5 0.0 0.5 1.0 1.5 2.0 2.5 F o rc e ( N /k g ) Time (sec) FP1 FP2 FP3 FP4(a)
(b)
(c)
0.0 0.5 1.0 1.5 2.0 2.5 0 2 4 6 8 10 12 F o rc e ( N /k g ) Time (sec) FP1 FP2 FP3 FP4 0.0 0.5 1.0 1.5 2.0 2.5 -1.0 -0.5 0.0 0.5 1.0 F o rc e ( N /k g ) Time (sec) FP1 FP2 FP3 FP4 0.0 0.5 1.0 1.5 2.0 2.5 -1.0 -0.5 0.0 0.5 1.0 F o rc e ( N /k g ) Time (sec) FP1 FP2 FP3 FP4 0.0 0.5 1.0 1.5 2.0 2.5 -1.5 -1.0 -0.5 0.0 0.5 1.0 1.5 2.0 2.5 F o rc e ( N /k g ) Time (sec) FP1 FP2 FP3 FP4 0.0 0.5 1.0 1.5 2.0 2.5 -1.5 -1.0 -0.5 0.0 0.5 1.0 1.5 2.0 2.5 F o rc e ( N /k g ) Time (sec) FP1 FP2 FP3 FP4(a)
(b)
(c)
A
B
C
D
A
B
C
D
A
B
C
D
3.1 그림 보행시작에서 시간에 따른 양측 하지의 성분별 지면반발력 (a) 전 후 방향 (b) 내 외 방향 (c) 수직 방향3.1 그림 은 보행시작과정에서 시간에 따른 지면 반발력을 정적기립상태에서 입 ( D) (toe off) 각하지의 첫 번째 보행주기 구간 의 발가락들림기 까지 성분별로 나타낸 . 것이다 정적 기립상태에서 유각하지는 지면 반발력의 전 후 방향 성분과 내 외측 , 성분이 반발력이 발목관절을 중심으로 각각 뒤쪽에서 앞쪽으로 외측에서 내측으 , , 로 향하고 있으며 입각하지는 뒤쪽에서 앞쪽으로 외측에서 내측으로 향하고 있 . 다 수직 성분은 유각하지가 입각하지보다 조금 더 컸으나 성분 크기의 차이가 크 , . 지 않았으며 피검자와 시도에 따라 입각하지가 더 큰 경우도 있었다 유각하지를 들어올리기 전 유각하지의 수직성분은 일시적으로 증가하고 그에 , 대응하는 입각하지의 감소가 나타나며 양측 하지의 전 후 방향 성분은 동시에 증 가하다가 유각하지가 먼저 정점에 도달한 후 감소하였고 입각하지는 유각하지가 정점에 도달할 때 급격히 증가하여 유각하지의 발가락들림기까지 계속 증가하여 . 정점에 도달하였다 유각하지의 내 외측성분은 외측으로 향하고 있던 지면반발력 , 이 일시적으로 증가하였다가 다시 감소하여 유각하지가 들리게 되고 동시에 입각 하지의 외측성분도 감소하였다가 증가하여 유각하지의 발가락들림기에서 첫 정점 . 에 도달하였다 유각하지를 들기 위해 이용된 지면반발력이 운동에너지로 작용되 어 유각하지가 들리고 이후 체중심이 입각하지로 이동하면서 운동에너지가 위치 . 에너지로 변경된다 이로 인해 입각하지의 단하지지지기 초반 지면반발력이 일시 적으로 감소하였다가 증가된 위치에너지를 운동에너지로 변경하면서 지면반발력 . 은 다시 증가하여 두 번째 정점에 도달하였다 유각하지의 초기접지기에서 내 외 측과 수직성분은 두 번째 정점에 도달하였고 전 후 방향 성분은 초기접지기 직후 . 에 두 번째 정점에 도달하였다 유각하지의 초기접지 시에 전 후 방향 성분의 경 (forward shear force)
우 정상상태 보행과 달리 전방향 전단력 이 발생하며 입각하지 . 의 초기접지에서 그 크기가 줄어들었다 또한 유각하지의 초기접지기에서 내 외측 성분은 외측으로 향하는 전단력이 정상상태보다 작았으며 입각하지의 초기접지에 . 서는 증가하였다 ( A) 유각하지의 보행시작구간 구간 에서 전 후 방향 성분은 정적 기립상태에서
(backward shear force)
보행을 시작하므로 정상상태 보행과는 달리 후방향 전단력 은
.
, 향하는 전단력의 증가와 감소만 나타났고 수직성분은 정상상태 보행에서 운동에 너지와 위치에너지의 상호 변환에 의해 나타나는 두 개의 정점 없이 추진력 (acceleration force)을 위한 힘만 나타났다. ( B) A 입각하지의 보행시작구간 구간 에서 전 후 방향 성분은 구간 와 같이 정적 기립상태에서 보행을 시작하므로 후방향 전단력은 없고 전방향 전단력만 나타났 . 으며 정상상태 보행과 같이 두 개의 정점이 나타났다 유각하지의 발가락들림으로 인해 체중심이 입각하지로 옮겨지면서 첫 정점이 나타났으며 정적 상태의 체중심 을 가속하기 위해 발목관절을 중심으로 지면을 밀어낼 때 두 번째 정점이 나타났 , (initiation of gait) 는데 두 번째 정점은 보행속도의 신속한 증가를 위해 보행시작 에 . 서 가장 크게 나타났다 내 외측 성분은 기립상태에서의 외측으로 향하는 전단력 이 유각하지의 내측성분의 증가와 함께 감소하였다가 정상상태 보행과 동일하게 . 내 외측으로 증감이 반복되었다 수직성분은 유각하지의 초기 증가로 인한 감소가 나타났으며 유각하지의 발가락들림과 함께 정상상태 보행에서 운동에너지와 위치 . 에너지의 상호 변환에 의해 나타나는 두 개의 정점이 동일하게 나타났다 (loading response) 정상상태 보행에서 전 후 방향 지면반발력은 하중수용기 와 말 (terminal stance) . 기입각기 에서 정점이 발생하여 두 번의 정점이 나타난다 초기접지
(initial contact)와 함께 하중수용기동안 후방의 전단력(backward shear force)이 나타
(mid-stance)
나 첫 번째 정점이 발생하고 중간입각기 에서 전단력은 영이 되고 이후
(forward shear force) .
전방의 전단력 이 나타난다 이후 반대쪽 발의 초기접지기에서 (pre-swing) 두 번째 정점이 발생하여 이후 전유각기 동안 반대쪽 발로 체중심이 이 . 동하여 힘이 감소한다 (lateral side) 내 외측 지면반발력은 초기 접지 순간 외측 으로 잠시 힘이 발생한 (medial side) . 후 하중수용기에서 빠르게 내측 으로 힘이 발생하였다 단하지지지기동 , 안 내측으로 일정한 전단력이 발생하였고 중간입각기에서 내측으로 발생하던 전 . 단력이 감소하여 정점에 도달하였다 전유각기에서 다시 외측으로 힘이 발생하다 . 가 발가락들림 직전에 내측으로 전단력이 발생하여 정점이 나타난다 수직 지면반발력은 하중수용기 직후와 반대발 초기접지 직후에 두 번의 정점이 . 발생한다 처음에 나타나는 정점은 하중수용기동안 반대발로부터 체중심이 이동하
(breaking force) .
여 발생하는 정점으로 제동력 이라고 한다 두 번째 나타나는 정점은
전유각기에서 하지를 들어올리기 위해 지면을 밀어주어 발생되는 힘으로 추진력 (acceleration force)이라고 한다.
0 20 40 60 80 100 -3 -2 -1 0 1 2 3 F o rc e ( N /k g ) Gait Cycle (%) Period B Period D Steady 0 20 40 60 80 100 -1.0 -0.5 0.0 0.5 1.0 F o rc e ( N /k g ) Gait Cycle (%) Period B Period D Steady 0 20 40 60 80 100 0 2 4 6 8 10 12 F o rc e ( N /k g ) Gait Cycle (%) Period B Period D Steady 0 20 40 60 80 100 -3 -2 -1 0 1 2 3 F o rc e ( N /k g ) Gait Cycle (%) Period A Period C Steady 0 20 40 60 80 100 -1.5 -1.0 -0.5 0.0 0.5 1.0 F o rc e ( N /k g ) Gait Cycle (%) Period A Period C Steady 0 20 40 60 80 100 0 2 4 6 8 10 12 F o rc e ( N /k g ) Gait Cycle (%) Period A Period C Steady 0 20 40 60 80 100 -3 -2 -1 0 1 2 3 F o rc e ( N /k g ) Gait Cycle (%) Period B Period D Steady 0 20 40 60 80 100 -1.0 -0.5 0.0 0.5 1.0 F o rc e ( N /k g ) Gait Cycle (%) Period B Period D Steady 0 20 40 60 80 100 0 2 4 6 8 10 12 F o rc e ( N /k g ) Gait Cycle (%) Period B Period D Steady 0 20 40 60 80 100 -3 -2 -1 0 1 2 3 F o rc e ( N /k g ) Gait Cycle (%) Period A Period C Steady 0 20 40 60 80 100 -1.5 -1.0 -0.5 0.0 0.5 1.0 F o rc e ( N /k g ) Gait Cycle (%) Period A Period C Steady 0 20 40 60 80 100 0 2 4 6 8 10 12 F o rc e ( N /k g ) Gait Cycle (%) Period A Period C Steady (a) (b) 3.2 그림 보행시작과정에서의 구간별 지면반발력 (a) 유각하지 (b) 입각하지
3.2 ( D)
그림 는 정적기립상태에서 입각하지의 첫 번째 보행주기 구간 의 발가락들
(toe off) . 3.2 (a) (b)
림기 까지의 지면반발력을 나타낸 것이다 그림 와 의 굵은 실선은 , 정상상태 보행을 나타낸 것이고 점선은 해당 하지의 보행시작구간과 첫 번째 보 . (a) A, C 행주기를 나타낸 것이다 는 정상상태 보행의 평균값과 구간 를 함께 넣었 , (b) B, D 고 는 정상상태 보행의 평균값과 구간 를 함께 보행주기별로 묶어 정상상 . 태 보행과 보행시작과정에서의 구간별 보행주기를 비교하기 위해 표현한 것이다 , , 보행시작구간의 정적 기립 상태에서는 지면반발력의 전 후 내 외측 수직 성분 이 모두 변화 없이 지속적으로 작용하고 있다가 보행시작과 함께 양측 하지 지면 . 반발력의 세 성분을 모두 이용한 힘으로 유각하지를 들어 올리게 된다 이때 유각 하지 뿐 아니라 입각하지도 내측으로 작용하고 있던 반발력이 감소하여 유각하지 의 내측과 수직성분 지면반발력은 증가하고 입각하지의 내측과 수직성분 반발력 . 도 동시에 감소한다 이와 같이 정적 기립 상태에 있다가 유각하지를 들어 올리는 것은 양측 하지의 지면반발력의 증가와 감소를 같이 이용하여 발을 들어 올리는 . ( A) , 것이다 유각하지의 보행시작구간 구간 에서 이용된 지면반반력의 전 후 내 외 , 18.9%, 54.2%, 56.8% 측 수직성분은 정상상태 보행 평균값에 각각 로 정상상태 보 . 행과 현저한 차이를 보였다 ( B) , , 이에 반해 입각하지의 보행시작구간 구간 에서의 지면반발력 전 후 내 외측 (peak value) 100.9%, 87.8%, 수직성분 각 극점값 들은 정상상태 보행 평균값에 각각 98.2%로 거의 정상상태 보행에 근접하였으며 그 중 전 후 방향의 지면반발력 성,
(forward shear force)
분은 정상상태 보다 전방향 전단력 이 조금 더 컸으나 수직성 . B 분의 극점값이 정상상태 보행과 가장 큰 차이를 보였다 구간 에서 지면반발력 세 성분의 각 극점값들은 정상상태 보행에 근접하였으나 발가락들림기가 정상상 27.4% 태 보행에 비해 정도 늦게 일어나게 되어 전체적인 지면반발력의 형태 (pattern)는 정상상태 보행과 차이가 있었다 유각하지의 보행시작구간에서는 지면. 반발력의 세 성분이 정상상태 보행과 전혀 다른 유형이었고 반발력도 현저한 차 , (terminal stance) 이를 보였으나 입각하지의 보행시작구간에서는 말기입각기 부터 정 (pattern) . 상상태 보행과 비슷한 유형 을 보이기 시작했다 C 유각하지의 첫 번째 보행주기인 구간 에서는 보행속도가 아직 정상상태에 이
. 르지 않아 지면반발력의 세 성분 모두 정상상태 보행의 평균값에 이르지 못했다 특히 보행속도가 정상상태 보행에 비해 느리기 때문에 전 후 방향 성분에서 후방
(backward shear force)
향 전단력 과 내 외측 성분의 초기 내측 지면반발력 그리고 . 수직성분의 초기 극점값 모두 정상상태에 미치지 못했다 그러나 이 구간의 입각 62.8% 3.2% 기가 로 정상상태 보행에 비해 정도 더 길었지만 지면반발력의 전체적 (pattern) , 인 형태 는 정상상태 보행과 유사하였고 말기입각기에서의 수직성분 극점
(preswing) , (forward shear force)
값과 전유각기 에서의 내측 극점값 전방향 전단력 이 . 정상상태에 근접하였다 D 입각하지의 첫 번째 보행주기인 구간 에서는 정상상태 보행에 비해 보행속도 (walking speed)가 0.09m/s 차로 조금 느려 전 후 방향의 지면반발력에서는 후방향 , 전단력이 약한 반면 전방향 전단력은 정상상태 보행에 근접하였고 내 외측 방향 의 지면반발력은 전체적으로 정상상태 보행에 비해 단하지지지기 동안 전반적으 . 로 내측 지면반발력이 작았다 수직 지면반발력은 전 후 방향의 성분과 같이 정상 (breaking force) 상태 보행에 비해 보행속도가 느려 하중수용기에서의 제동력 은 정 (acceleration force) 상상태 보행보다 작았지만 전유각기에서의 추진력 은 정상상태에 . 근접하였다
3.3 총
총
총
총 압
압
압
압력
력
력중
력
중심
중
중
심
심의
심
의
의
의 이
이
이동
이
동
동
동
-5 0 0 5 0 1 0 0 1 5 0 -2 0 0 -1 5 0 -1 0 0 -5 0 0 5 0 1 0 0 1 5 0 A P d i sp l a c e m e n t (m m ) M L d is p la c e m e n t (m m ) Max COP OnsetSwing limb
Stance limb
Swing toe off
Swing initial contact SW HO -5 0 0 5 0 1 0 0 1 5 0 -2 0 0 -1 5 0 -1 0 0 -5 0 0 5 0 1 0 0 1 5 0 A P d i sp l a c e m e n t (m m ) M L d is p la c e m e n t (m m ) Max COP Onset
Swing limb
Stance limb
Swing toe off
Swing initial contact SW HO 3.3 그림 보행시작구간에서의 총 압력중심 이동 보행시작과정에서 양측 하지의 지면반발력은 압력중심의 변화에 영향을 주게 . 3.3 ( A, 된다 그림 은 정적기립상태에서 입각하지의 첫 번째 발가락들림기까지 구간 B) 각 힘측정판에서 획득된 압력중심(COP)과 수직 지면반발력으로부터 보행시작 , 3.4 구간에서의 총 압력중심에 대한 궤적을 확대하여 나타낸 것이고 그림 는 정적 ( A, B, C, D) 기립상태에서 입각하지의 두 번째 발가락들림기까지 구간 네 개의 힘 (COP) (net 측정판에서 획득된 압력중심 과 수직 지면반발력으로부터 총 압력중심 COP)에 대한 궤적을 계산하여 나타낸 것이다 정적기립상태에서 총 압력중심은. , 내 외측의 이동보다 전 후방향의 이동이 먼저 나타났는데 전 후방향의 이동이 15mm 이상이 되는 시점을 압력중심의 이동 시작으로 정의하였다 총 압력중심이. 유각하지의 외측 후방으로 이동하기 시작하는 시점과 유각하지의 외측 최대인 시
Onset Max COP .
점을 각각 과 로 정의하였다
( A, B)
양측 하지의 보행시작구간 구간 에서 유각하지의 지면반발력이 입각하지
(onset) .
력중심 이동이 시작될 때 유각하지의 수직 지면반발력이 서서히 증가하가다 정점 (Max COP) , 에 도달하여 총 압력중심이 유각하지의 외측 뒤쪽 정점 에 이르고 이때 정적 기립 상태에서 유지되던 입각하지의 내측 지면발발력이 감소하며 이는 총 . 압력중심이 유각하지 방향으로 이동하는 것을 돕는다 이후 유각하지의 수직 지면 반발력이 감소하고 그에 상응하는 입각하지의 수직 지면반발력이 증가하여 총 압 . 력중심이 입각하지로 이동한다 양측 하지의 수직 지면반발력이 동일하게 되는 시 , 점 직후에 유각하지의 발뒤축이 들리게 되는데 이때 전 후 방향 성분은 감소하며 내 외측 방향 성분은 반전되고 총 압력중심은 입각하지 방향으로 빠르게 이동하 SW HO( ) . 여 유각하지 발뒤축들림기 에 이르게 된다 유각하지의 발뒤축들림기에서 , 발가락들림기까지 총 압력중심은 입각하지의 외측 후방으로 빠르게 이동하며 입
( B) (single limb support)
각하지 구간 의 단하지지지기 에서는 천천히 입각하지의 외측 . (initial contact) 전방으로 이동한다 지면에서 떨어진 유각하지가 초기접지 를 할 때 . 까지 압력중심은 입각하지의 외측 전방으로 이동하다가 내측으로 이동한다 유각 하지가 초기접지를 하게 되면 입각하지의 외측 전방으로 이동하던 총 압력중심은 ( C) 다시 지면과 접한 유각하지 구간 로 빠르게 이동하고 입각하지의 지면반발력도 -2 0 0 0 2 0 0 4 0 0 6 0 0 8 0 0 1 0 0 0 1 2 0 0 1 4 0 0 -2 0 0 -1 5 0 -1 0 0 -5 0 0 5 0 1 0 0 1 5 0 2 0 0 A P d i sp l a c e m e n t (m m ) M L d is p la c e m e n t (m m ) Stance toe off Stance initial contact Swing toe off Swing initial contact Swing toe off -2 0 0 0 2 0 0 4 0 0 6 0 0 8 0 0 1 0 0 0 1 2 0 0 1 4 0 0 -2 0 0 -1 5 0 -1 0 0 -5 0 0 5 0 1 0 0 1 5 0 2 0 0 A P d i sp l a c e m e n t (m m ) M L d is p la c e m e n t (m m ) Stance toe off Stance initial contact Swing toe off Swing initial contact Swing toe off 3.4 그림 보행시작에서의 총 압력중심 이동
급격히 감소하여 총 압력중심이 유각하지로 이동하기 직전 입각하지가 들리게 된 . 다 총 압력중심이 단하지지지기 동안에는 천천히 이동하며 양하지지지기 동안에 . 는 빠르게 이동하였다 -0.5 0 0.5 1 1.5 2 2.5 3 3.5 4 0 0.5 1 1.5 2 2.5 3 Time ( se c ) Time ( se c ) Time ( se c ) Time ( se c ) V e lo c it y (m / s ) V e lo c it y (m / s ) V e lo c it y (m / s ) V e lo c it y (m / s ) X_COP_vel X_COG_vel
A
B
C
D
-0.5 0 0.5 1 1.5 2 2.5 3 3.5 4 0 0.5 1 1.5 2 2.5 3 Time ( se c ) Time ( se c ) Time ( se c ) Time ( se c ) V e lo c it y (m / s ) V e lo c it y (m / s ) V e lo c it y (m / s ) V e lo c it y (m / s ) X_COP_vel X_COG_velA
B
C
D
3.5 · 그림 보행시작에서의 압력중심과 무게중심의 전 후 방향 순간속도 3.5 그림 는 정적기립상태에서 입각하지의 두 번째 발가락들림기까지 총 압력중 (net COP) 심 의 이동과 정적기립상태에서 입각하지의 두 번째 초기접지기까지 무게(center of gravity, COG) · (instantaneous velocity)
중심 이동의 전 후 방향 순간속도 를
.
나타낸 것이다 총 압력중심은 네 개의 힘측정판에서 측정된 압력중심과 수직 지
, (pelvic marker)
면반반력 성분으로 계산된 것이고 무게중심은 네 개의 골반 마커 인
· (anterior superior iliac spine, ASIS), (posterior
좌 우 위앞엉덩뼈가시 위뒤엉덩뼈가시
superior iliac spine, PSIS)의 중심점을 계산하여 얻은 것이다.
정적기립상태에서 보행시작과 함께 압력중심은 뒤쪽으로 이동하고 무게중심은
. 0.63
앞으로 이동한다 뒤쪽으로 이동하던 압력중심이 초에 반전되어 앞으로 이동
Max COP