2017년 12 월 보 고 서 번 호: 17ZS1700-01-1440P
20
조선해양 및 육상플랜트를 위한
스마트 HSE 시스템 개발
Development of Smart HSE System for Shipbuilding and Onshore Plant
제 출 문
본 연구보고서는 주요사업인“조선해양 및 육상플랜트를 위한 스마트 HSE 시스템 개발” 연구의 결과로서, 본 과제에 참여한 아래의 연구팀이 작성한 것입니다. 2017 년 12 월 과제 연구책임자 : 책임연구원 장 병 태 (SW·콘텐츠연구소) 세부과제 연구책임자 : 책임연구원 박 정 호 (SW·콘텐츠연구소) 책임연구원 임 동 선 (SW·콘텐츠연구소) 책임연구원 김 재 명 (SW·콘텐츠연구소) 책임연구원 진 광 자 (SW·콘텐츠연구소) 책임연구원 이 승 용 (SW·콘텐츠연구소) 선임연구원 유 대 승 (SW·콘텐츠연구소) 선임연구원 최 유 희 (SW·콘텐츠연구소) 선임연구원 이 좌 형 (SW·콘텐츠연구소) 선임연구원 정 우 성 (SW·콘텐츠연구소) 연구원 윤 태 현 (SW·콘텐츠연구소)요 약 문
I. 제 목
조선해양 및 육상플랜트를 위한 스마트 HSE 시스템 개발II. 연구개발의 목적 및 중요성
n 조선해양 및 육상플랜트 산업 분야의 글로벌 경쟁력을 유지하고 선박이나 플랜트를 지속적으로 수주하기 위해서는 건조 작업장 에서의 안전이 확보되어야 하며, 이는 발주처의 필수 요구사항임 n 또한, 우리나라가 선진국으로 진입하는 문턱에서 사업장 및 노 동자의 안전유지 비용이 급증하고 있으며 이를 극복하기 위하 여 작업장 및 작업자의 안전관리를 위한 효율적이고 효과적인 방안이 요구되고 있음 n 이러한 산업체의 수주 여건과 더불어 최근 작업장 및 작업자의 환경 개선에 대한 요구사항이 크게 증가되고 있는 상황임 n 산업현장에서 발생하는 작업자 안전사고는 해마다 증가하는 추 세이며, 이는 매년 수조원에 달하는 경제적 손실을 야기하여 해당 업체의 경쟁력 약화로 이어짐n 본 사업에서는 ICT 기술을 활용하여 국가 주력산업 분야에서 국내기업의 수주 경쟁력을 향상시키고 작업자 및 작업장의 안 전을 보장하기 위한 스마트 HSE(Health, Safety & Environment) 시스템을 개발하고자 함
III. 연구개발의 내용 및 범위
다양한 사고 위험이 많은 제조, 건설 산업 등의 작업 현장에서 작 업자의 안전을 보장하기 위한 스마트 HSE 시스템의 단위 시제품 개발 을 위해 필요한 핵심 기술 확보를 목표로 다음과 같은 연구내용 및 범 위를 정의하였다. n 복합구조물이 산재한 플랜트를 비롯한 대형 작업현장에서 작업 자의 사고를 예방하기 위한 스마트 HSE 서브시스템 통합 및 테 스트베드 적용 시험Ÿ HSE 시스템 지원용 유무선 통신 최적화를 위한 Private LoRa 망 구축 및 전파분석 시뮬레이터 성능 시험 Ÿ 실제 작업현장을 재현한 2D 맵 기반의 HSE SW 플랫폼 제작 및 작업장 위험도 예측 기술 개발 Ÿ 복합구조물내에서의 이동객체 위치추적 기술 성능 시험 Ÿ Private LoRa망에서의 실시간 작업자 안전관리 시스템 성능 시험
Ÿ 스마트 게이트 사용 시제품 개발 Ÿ 영상기반 공정 모니터링 서비스 기술 개발 Ÿ 고위험 작업장을 재현한 테스트베드 구축
IV. 연구개발결과
본 연구의 주요 결과에 대한 요약은 다음과 같다 n 작업자 및 작업장 정보를 끊김 없이 전송하기 위한 HSE 시스템 지원용 유무선 통신 최적화 기술 성능 시험Ÿ Private LoRa망 구축을 위한 LoRa Gateway와 Network Server 개발 Ÿ LoRaTM 통신 밀폐공간 현장테스트 및 성능평가 Ÿ 전파분석 시뮬레이터 구현 및 성능평가 n 작업자 사고 예측을 위한 HSE SW 플랫폼 시작품 개발 Ÿ HSE 소프트웨어 플랫폼 시작품 개발 Ÿ 작업장 위험도 예측 기술 개발 Ÿ 작업자 위치추적 기술 테스트베드 성능시험 n 스마트 안전 장구 및 스마트 게이트 상용 시제품 개발 Ÿ 실시간 작업자 안전 모니터링 시스템 상용 시제품 Ÿ 스마트 게이트 고도화 및 상용 시제품 개발 Ÿ 산업 안전 장구용 웨어러블 기반 기술 연구
n HSE 플랫폼 기반 응용 서비스 개발 Ÿ 영상기반 공정 모니터링 서비스 기술 개발 Ÿ 선박표준네트워크(NMEA) 기반 선박 안전 모니터링 시스템 개발 Ÿ 선박 환경정보 위험예측 시각화 n HSE 시스템 성능 시험을 위한 테스트베드 구축 Ÿ 고위험 작업장에서의 HSE 시스템 성능 시험용 테스트베드 구축 Ÿ 밀폐공간 설치 및 시험 Ÿ HSE 서브 시스템/기술에 대한 시험 검증 n 산학연 협력 네트워크 구축 및 기업지원 Ÿ 조선해양 및 플랜트 ICT 분야 산학연 협력 네트워크 구축 Ÿ HSE 시스템 관련 글로벌 시장·기술 동향 조사·분석 Ÿ HSE 시스템 결과물에 대한 글로벌 마케팅 지원
Ⅴ. 기대성과 및 건의
n 작업자의 위험을 사전에 예측하여 사고를 방지하기 위한 스마 트 HSE 시스템의 필수 요소 기술에 대한 성능 시험으로 현장 활용이 가능한 수준의 서브시스템 시제품 개발과 요소기술에 대한 기술이전으로 완성도 높은 HSE 시스템을 개발하기 위한 기반을 마련하였음 Ÿ HSE 시스템의 근간이 되는 무선 통신기술을 위해 Private LoRa 통신망을 자체적으로 구축하여 밀폐공간에서의 통신 가 능성을 시험하였고, 테스트베드 현장 CAD를 활용한 전파분석 시뮬레이터의 시험도 오차 범위내의 결과를 얻음 Ÿ 철구조물이 산재한 복합구조물에서의 이동객체 위치주적 기술 의 고도화를 위해 테스트베드에서의 성능평가가 이루어졌고, 중소기업으로의 기술이전이 이루어짐 Ÿ 실시간 작업자 안전 모니터링 시스템을 통해 작업자의 필수품 인 안전장구의 미착용을 사전에 탐지하여 위험도 분석 및 경 고를 제공하였고, 이 시제품 또한 기술이전이 이루어짐 Ÿ 이 이외에도 작업자의 입출입을 식별하기 위한 스마트 게이트 시제품 개발, 3D 모델링에서의 위험도 분석 시제품 등이 개발 되어 향 후 완성도 높은 스마트 HSE 시스템 개발을 위한 단계 가 마련되었음 n 당해년도 조기 지적재산권 출원과 HSE 시스템의 핵심기술에 대한 산업체 기술이전으로 개발과 동시에 상용화를 추진하기 위한 발판을 확보하였음목 차
제 1 장 당해연도 개발 목표 및 개발 내용 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
1
제 1 절 연구목표의 달성도 ···2 제 2 절 연구목표의 타당성 ···4 제 3 절 수행체계 및 전년도 평가결과 조치사항 ···8제 2 장 당해년도 추진 실적 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
12
제 1 절 국내외 기술동향 및 기술수준 요약 ···13 제 2 절 성과지표 달성실적 ···35 제 3 절 주요 성과물 ···82 제 4 절 정량적 성과 ···88제 3 장 당해연도 연구개발 추진내역 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
95
제 1 절 품질경영 ···96 제 2 절 추진체계 ···97 제 3 절 세부연구결과 ···98 1제 4 장 결론 및 차년도 계획 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
433
참고문헌 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
436
약 어 표 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
444
표 목 차
표 1-1 Private LoRaWAN End Device H/W Specification ···104
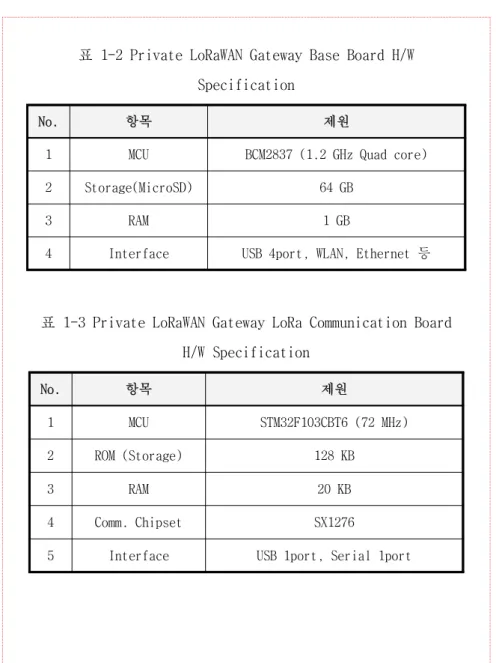
표 1-2 Private LoRaWAN Gateway Base Board H/W Specification ····107
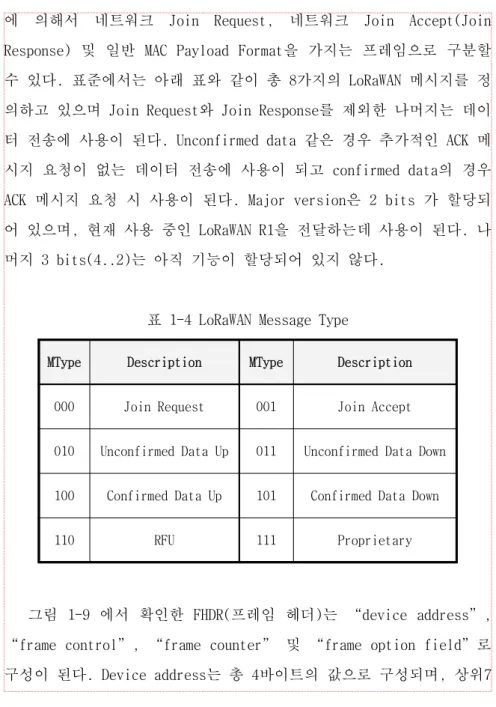
표 1-3 Private LoRaWAN Gateway LoRa Communication Board H/W Specification 107 표 1-4 LoRaWAN Message Type ···115
표 1-5 MAC Commands in LoRaWAN Specification ···120
표 1-6 LoRaWAN End Device S/W Modules ···128
표 1-7 LoRa MAC 상태 정보 저장 구조체 ···129
표 1-8 LoRaWAN Gateway S/W Modules ···132
표 1-9 LoRa Rx Frame Information 구조체 ···134
표 1-10 LoRaWAN Network Server S/W Modules ···135
표 1-11 Gateway 정보 관리 구조체 ···136
표 1-12 End Device 정보 관리 구조체 ···137
표 1-13 Gateway의 수신 정보 구조체 ···138
표 1-14 LoRa 통신 모듈 개발 환경 ···139
표 1-15 Gateway Base Board 통신 모듈 개발 환경 ···139
표 1-16 개발 모듈의 전력 소모 내역 비교 ···152
표 1-17 상용품과의 전력 소모 내역 비교 ···152
표 1-18 SF 및 패킷사이즈에 따른 TOA 와 Time-Off ···170
표 1-19 Priority에 따른 Slot Index ···173
표 1-20 우선순위 레벨에 따른 전송 간격 ···174
표 1-22 ORT 및 WinProp를 이용한 해석 결과와 측정 결과의 비교 (ETRI 실내) 222 표 1-23 ORT를 이용한 회절 유무에 따른 해석 결과와 측정 결과의 비교 223 표 1-24 ORT 및 WinProp를 이용한 해석 결과와 측정 결과의 비교 (테스트베드)226 표 2-1 안전관리 속성 정보 ···240 표 2-2 위험 구역 종류에 따른 발생 재해 종류 분류 ···244 표 2-3 위험 작업 종류에 따른 발생 재해 종류 분류 ···244 표 3-1 RWSMS 송수신 데이터의 유형 ···307 표 3-2 기존(2016년) 게이트와의 차이점 정리 ···327 표 3-3 10-17년도 조선업 중대재해 현황(총 140건) ···340 표 4-1 작업자 건강 데이터 속성 및 맵핑 ···416 표 4-2 작업자 안전 데이터 속성 및 맵핑 ···418 표 4-3 작업장 환경 데이터 속성 및 맵핑 ···419 표 5-1 융합얼라인언스 분과별 참여기업 ···424 표 5-2 제1차 전문가 초청 세미나 결과 ···426 표 5-3 제2차 전문가 초청 세미나 결과 ···427 표 5-4 수요조사 결과 ···428 표 5-5 글로벌 시장·기술 동향 조사·분석 보고서 ···431
그 림 목 차
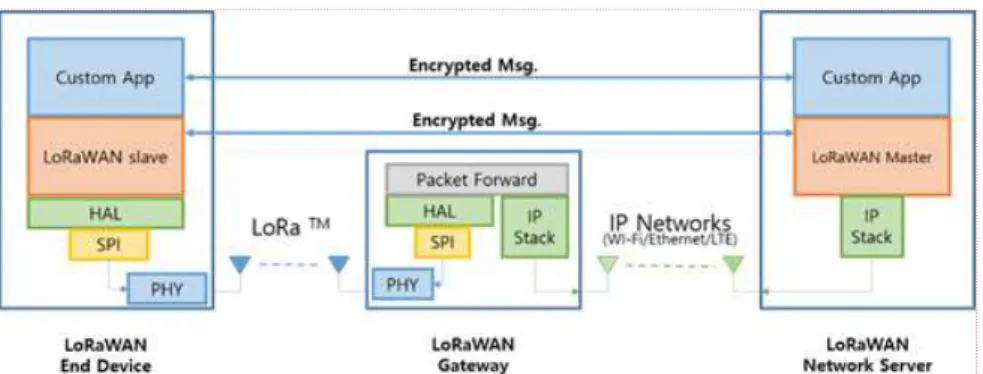
그림 1-1 LoRaWAN 구성 ···99
그림 1-2 Private LoRaWANTM Network Protocol Stack 구성도 ···103
그림 1-3 Private LoRaWAN End Device Module H/W ···104
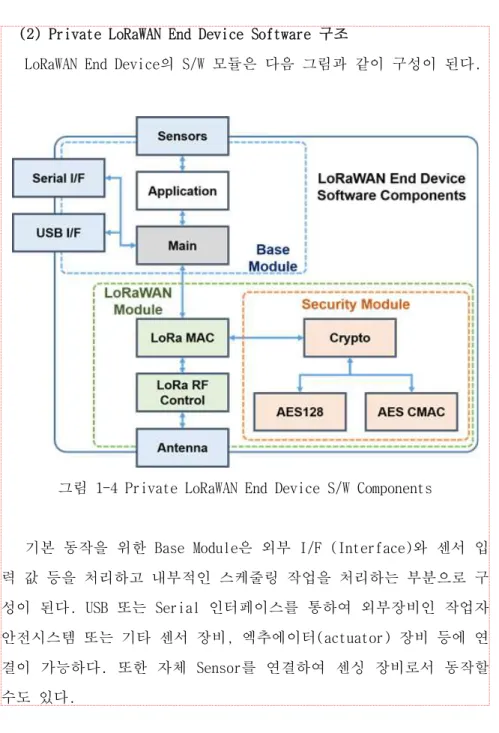
그림 1-4 Private LoRaWAN End Device S/W Components ···105
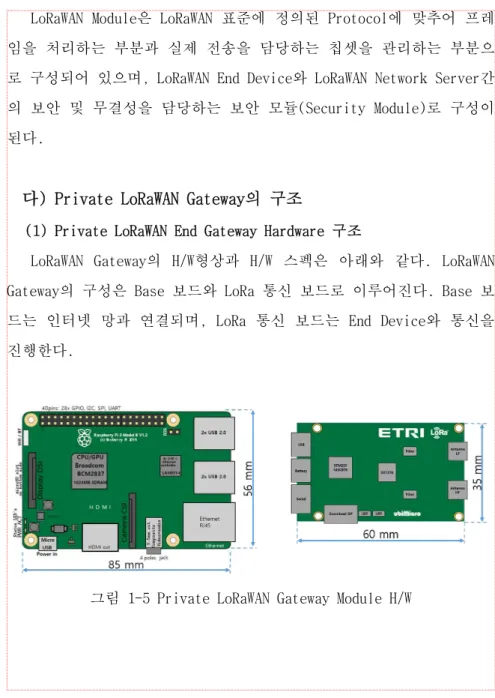
그림 1-5 Private LoRaWAN Gateway Module H/W ···106
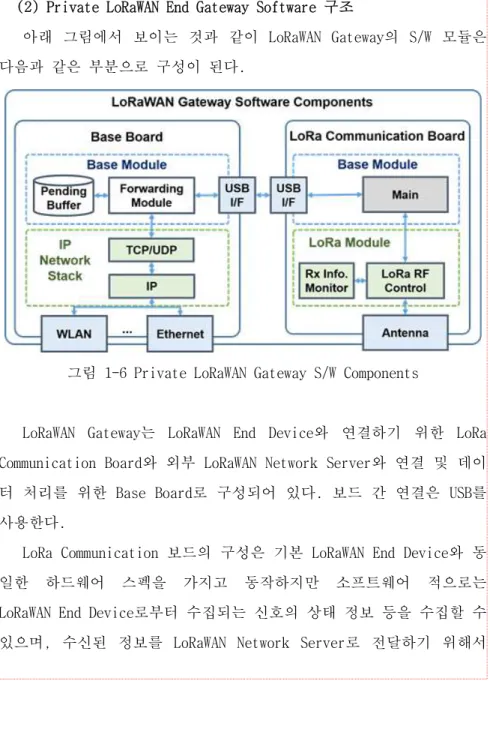
그림 1-6 Private LoRaWAN Gateway S/W Components ···108
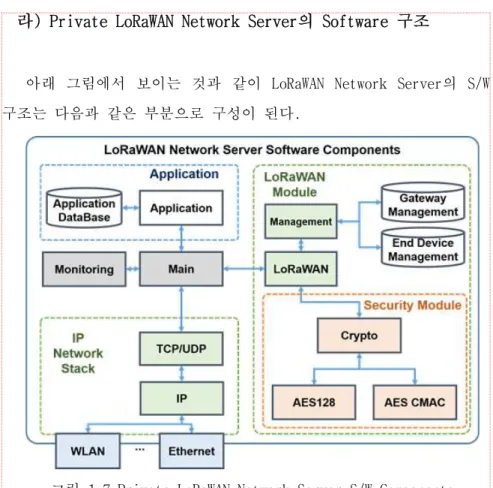
그림 1-7 Private LoRaWAN Network Server S/W Components ···110
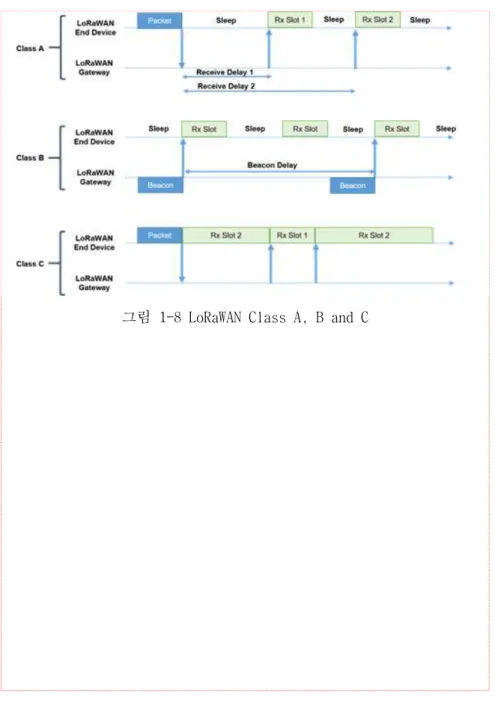
그림 1-8 LoRaWAN Class A, B and C ···113
그림 1-9 LoRaWAN Frame Format ···114
그림 1-10 LoRaWAN Mac Header field ···114
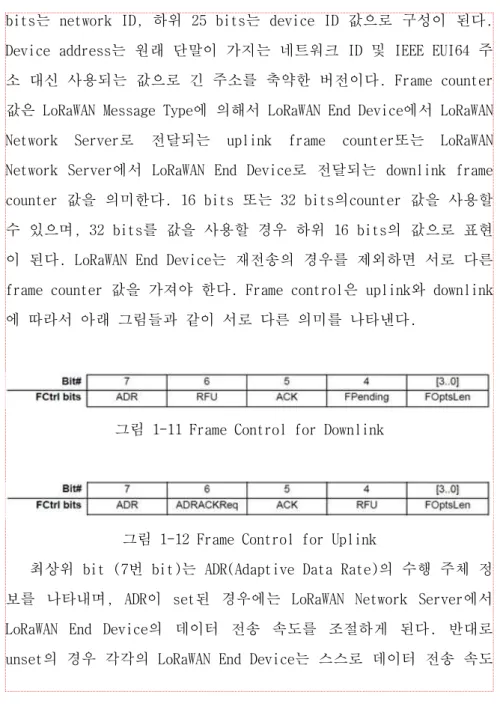
그림 1-11 Frame Control for Downlink ···116
그림 1-12 Frame Control for Uplink ···116
그림 1-13 데이터 재전송 및 frame pending 처리 방법 ···118
그림 1-14 LoRaWAN Network Join Process ···121
그림 1-15 A Block format ···123
그림 1-16 AES 128 Encryption 과정 ···124
그림 1-17 B Block Format ···126
그림 1-18 AES CMAC 연산 도식도 ···126
그림 1-19 RFC 4493: AES-CMAC Algorithm Pseudo Code ···127
그림 1-20 실시간 작업자 안전 모니터링 패킷 포맷 ···131
그림 1-22 기존 LoRaTM 통신모듈 회로도 ···143 그림 1-23 소형화된 LoRaTM 통신모듈 회로도(490 MHz 대역 제거) 143 그림 1-24 일반적인 모듈 타입 회로 구성 ···144 그림 1-25 소형화된 LoRaTM 통신모듈 회로도 ···145 그림 1-26 소형화된 LoRaTM 통신모듈 PCB 설계도 ···146 그림 1-27 소형화된 LoRaTM 통신모듈 ···147 그림 1-28 개발된 LoRaTM 통신모듈 크기비교 ···147 그림 1-29 소형화된 LoRaTM 통신모듈 탑재 예 ···148 그림 1-30 베이스 모듈 설계도 ···149 그림 1-31 베이스 모듈 PCB 설계도 ···150 그림 1-32 베이스 모듈 결과물 ···150 그림 1-33 모듈 저전력화 개발 계획 ···151 그림 1-34 IC880 SX1301 구성 ···153 그림 1-35 Gateway T1 모델 기구 설계 ···154 그림 1-36 Gateway T2 모델 회로설계 ···155
그림 1-37 개발된 Private LoRa Gateway ···156
그림 1-38 LoRa 단말 수에 따른 전송성공률(1 Channel) ···158 그림 1-39 Slot 기반 LoRa Network 모델 ···163 그림 1-40 Slot 기반 LoRa 프로토콜 구조 ···163 그림 1-41 부스트랩 단계 ···164 그림 1-42 데이터 전송 단계 ···165 그림 1-43 유지보수 단계 ···166 그림 1-44 복수의 Slot으로 나누어진 슈퍼프레임 ···168
그림 1-45 슈퍼프레임 구조 ···170 그림 1-46 스케쥴링 프로세스 ···172 그림 1-47 스케쥴 패킷의 구조 ···173 그림 1-48 Slot 기반 LoRa 에서 실시간 데이터 전송 ···175 그림 1-49 분류기 ···176 그림 1-50 LoRaWAN 기능 시험 구성도 ···180 그림 1-51 P2P 통신 실험 결과 ···181
그림 1-52 LoRaWAN Network Server에서 할당 한 보안 Key ···182
그림 1-53 LoRaWAN 암호화 패킷 처리 방식 ···183
그림 1-54 LoRaWAN에 저장된 LoRaWAN End Device 정보 ···184
그림 1-55 다중 LoRaWAN Gateway 접속 정보 ···185 그림 1-56 현장 테스트베드 공장 배치도 ···186 그림 1-57 현장 실험 환경 ···187 그림 1-58 실험 위치에 따른 수신 성공률 ···188 그림 1-59 실험 공간 별 실험 결과 비교 ···189 그림 1-60 부호율 변화에 따른 수신 신호 세기 및 수신율 ···190 그림 1-61 수신 신호 세기에 따른 신호 대 잡음비 ···192 그림 1-62 신호 세기에 따른 누적 오류율 ···192 그림 1-63 Relay 필요성 검증 시나리오 ···193 그림 1-64 설치 위치별 수신 성능 비교 ···194 그림 1-65 다면체 및 원기둥에 대한 삼각형 메시 구성 예 ···197 그림 1-66 해양플랜트 모델에 대한 삼각형 메시 구성 예 ···198 그림 1-67 삼각형 메시 병합 및 회절 모서리 추출 ···199
그림 1-68 원기둥을 다각형 메시로 근사하여 구성한 예 ···199 그림 1-69 다각형 메시로 구성된 해양플랜트 모델 ···200 그림 1-70 송신점으로부터 반사튜브를 생성한 예 ···201 그림 1-71 모서리로부터 반사튜브를 생성한 예 ···201 그림 1-72 반사튜브의 자식으로서 반사튜브를 생성한 예 ···203 그림 1-73 모서리에 대한 회절 튜브 생성 ···205 그림 1-74 반사튜브의 자식으로서 회절튜브를 생성한 예 ···206 그림 1-75 산란트리의 생성 예 ···207 그림 1-76 산란트리와 역방향 광선추적을 이용한 전파경로 찾기 ····209 그림 1-77 역방향 광선추적으로 찾은 반사점이 ···210 그림 1-78 역방향 광선추적으로 찾은 회절점이 ···210 그림 1-79 송·수신점과 산란점들 사이의 투과점 찾기 ···211 그림 1-80 제안한 광선추적 알고리즘을 이용한 광선추적 예 ···211 그림 1-81 해석 영역의 3차원 셀 분할 ···213 그림 1-82 반사튜브 내부에 포함된 다각형 찾기 ···214 그림 1-83 회절튜브 내부에 포함된 다각형 찾기 ···215 그림 1-84 선분과 교차하는 다각형 찾기 ···216 그림 1-85 ETRI 실내에서 송신점의 위치와 해석 경로 ···219 그림 1-86 Tx-1에 대한 Route-1, Route-2에서의 해석 결과와 측정 결과 220 그림 1-87 Tx-2에 대한 Route-3~Route-5에서의 해석 결과와 측정 결과 221 그림 1-88 Route-1, 3에서의 회절 유무에 따른 해석 결과와 측정 결과 222 그림 1-89 테스트베드 공장에서 송신점의 위치와 해석 경로 ···223 그림 1-90 Route-1~Route-3에서의 해석 결과와 측정 결과 ···225
그림 1-91 해양플랜트 모델에서 송신점의 위치와 해석 경로 ···227 그림 1-92 Tx-1에 대한 Route-1~Route-5에서의 해석 결과 ···228 그림 1-93 Tx-2에 대한 Route-6~Route-8에서의 해석 결과 ···229 그림 2-1 HSE SW 개발단계 ···231 그림 2-2 시스템 구조도 ···233 그림 2-3 데이터 흐름도 ···234 그림 2-4 프로그램 구조도 ···235
그림 2-5 HSE SW Database ERD ···236
그림 2-6 HSE SW Database Table 명세 ···237
그림 2-7 HSE SW 메뉴 구성도 ···238 그림 2-8 HSE SW 사용 설명서 ···239 그림 2-9 JT/PLMXML 파일의 속성 정보 추가 샘플 ···242 그림 2-10 재해 예측 및 위험도 산정 절차 ···243 그림 2-11 작업자 임의 출입 현황 모니터링 ···246 그림 2-12 작업 구역 내 작업자 체류시간 모니터링 ···247 그림 2-13 개별 작업장 모니터링 화면 ···248 그림 2-14 개별 구역 모니터링 화면 ···249 그림 2-15 무선측위 시스템 프로그램 구조 ···250 그림 2-16 프로그램 수행 순서도 ···251 그림 2-17 Superframe과 slot의 시간 구성 ···256 그림 2-18 기본 TWR 및 유사 SDS-TWR ···257 그림 2-19 메시지 송수신 절차 ···259 그림 2-20 Anchor모드 수행 상태도 ···264
그림 2-21 Tag모드 수행 상태도 ···266 그림 2-22 새로운 태그 등장으로 인한 superframe 및 slot시작지점 추정 269 그림 2-23 IR-UWB 태그 및 앵커 ···270 그림 2-24 앵커 및 태그 파라미터 제어 S/W ···271 그림 2-25 작업자 위치 추정 GUI ···272 그림 3-1 실시간 작업자 안전 모니터링 시스템 구성 ···277 그림 3-2 통신모듈을 통한 안전보호구 착용인식 구성도 ···277
그림 3-3 Data Flow Chart ···278
그림 3-4 MSG 서버의 화면구성 ···280 그림 3-5 MSG 클라이언트의 화면구성 ···281 그림 3-6 PPP 전송주기 설정 화면 ···282 그림 3-7 PPP 제어(LED, Buzzer) 화면 ···282 그림 3-8 작업장 안전장구 착용 규칙 설정 화면 ···283 그림 3-9 Protocol 수행절차 ···307 그림 3-10 RWSMS 정보 송수신Protocol 상세 ···308 그림 3-11 게이트 구조 비교 ···328 그림 3-12 일체형 스마트 게이트 구성 및 구조 ···329 그림 3-13 IP 카메라를 스트리밍 할 수 있는 dll의 구조 ···331 그림 3-14 영상 저장 시스템의 구성 ···332 그림 3-15 지능형 영상 인식을 통한 피플 카운팅의 구성 ···333 그림 3-16 지능형 영상 인식을 통한 피플 카운팅 실행화면 ···334 그림 3-17 데이터 처리 프로그램의 구조 ···335 그림 3-18 떨어짐 위험 기술 접목 시나리오(고소작업) ···341
그림 3-19 넘어짐/끼임 위험 접목 시나리오(중량물 운송작업) ···342 그림 3-20 가연성 물질 노출로 인한 화재/폭발 위험 기술 접목 시나리오(용접작업) 343 그림 3-21 떨어짐 위험 기술 접목 시나리오(고소작업) ···345 그림 3-22 넘어짐/끼임 위험 기술 접목 시나리오(중량물 운송작업)346 그림 3-23 기연성 물질 누출로 인한 화재/폭발 위험 기술 접목 시나리오(용접작업) 348 그림 4-1 기본 개념 ···353 그림 4-2 입체 모델 제작 예시 ···354 그림 4-3 기본 흐름도 ···355 그림 4-4 시스템 구조도 ···356 그림 4-5 작업 현장 모델 생성 모듈 ···357 그림 4-6 계획상 입체 모델 생성 모듈 ···358 그림 4-7 입체 모델 관리 모듈 ···359 그림 4-8 입체 모델 분리 모듈 ···360 그림 4-9 진척도 탐지 모듈 ···361 그림 4-10 울산공동연구실 촬영 사진 ···362 그림 4-11 울산공동연구실 입체 모델 ···363 그림 4-12 대전 12연구동 촬영 사진 ···364 그림 4-13 대전 12연구동 입체 모델 ···365
그림 4-14 Atlanta Bishop street apartments 촬영 사진 ···366
그림 4-15 Atlanta Bishop street Apartments 입체 모델 ···367
그림 4-16 Manual registration ···368
그림 4-17 Manual registration - scaling ···369
그림 4-19 Manual registration - rotation ···371
그림 4-20 Registration – point picking ···372
그림 4-21 KDTree 구성 예시 ···373
그림 4-22 OCTree 구성 예시 ···374
그림 4-23 OCTree 구성 기능 테스트 ···375
그림 4-24 Atlanta Bishop street Apartment 건설 진척 ···377
그림 4-25 volume 비교 결과 ···379
그림 4-26 Distance 계산 결과 ···381
그림 4-27 Segmentation ···382
그림 4-28 NMEA 기반 선박 안전 모니터링 시스템 구성도 ···384
그림 4-29 NMEA to LoRa 게이트웨이 시스템 구성 ···385
그림 4-30 NMEA 0183/NMEA 2000 TO LoRa Gateway 기능 ···387
그림 4-31 Real-Time Vessel Safety Monitoring System 화면 ···397
그림 4-32 시제품 테스트베드 구성 ···398 그림 4-33 HSE 센서 데이터 분석 관리 시스템 개념도 ···413 그림 4-34 HSE 센서 데이터 분석 관리 시스템 구조도 ···415 그림 4-35 테스트베드 배치도 ···417 그림 4-36 센서 데이터 대시보드 예 ···421 그림 5-1 KORMARINE 2017 전시회 참가 사진 ···432
제 1 절 연구목표의 달성도
수행계획서에 명시된 당해연도 연구목표와 세부연구내용을 단위 시스템별로 개발하고 테스트베드에서 수행하였고, 각각의 세부연구내 용과 이에 따른 산출물을 제시하여 당해연도에 제시한 연구목표를 달 성하였음을 보였다. 번호 세부목표 세부연구내용 특징 달성도 1 HSE 시스템 지원용 유무선 통신 최적화 기술 성능 시험LoRa Gateway와 Network Server 개발 Private LoRa망 지원 100% LoRaTM 통신 밀폐공간 성 능평가 밀폐공간 통신 가능성 확인 전파분석 시뮬레이터 성 능평가 CAD 데이터와 현 장시험 일치 2 HSE SW 플랫폼 시작품 개발 HSE 소프트웨어 플랫폼 시작품 Private LoRa와 연동 100% 작업장 위험도 예측 기술 작업자 위치 기 반 위험예측 작업자 위치추적 기술 성능이 보장되는 UWB기반의 위치 추적 3 스마트 안전장구 및 스마트 게이트 실시간 작업자 안전 모니 터링 시스템 상용 시제품 안전장구 착용여 부 실시간 모니 터링 100% 스마트 게이트 상용 시제 품 작업자 출입 자 동관리 안전장구용 웨어러블 기 반 기술 연구 VR/AR 기반의 작 업자 안전장구 기반연구
번호 세부목표 세부연구내용 특징 달성도 4 HSE 플랫폼 기반 응용 서비스 영상기반 공정 모니터링 서비스 기술 개발 건조 작업공정 진척률 모니터링 기술 100% NMEA 기반 선박 안전 모 니터링 시스템 개발 선박의 안전성 실시간 모니터링 5 HSE 시스템 테스트베드 구축 HSE 시스템 성능 시험용 테스트베드 구축 HSE 서브시스템 성능시험 100% 6 산학연 협력 네트워크 구축 HSE 시스템 시장분석 및 글로벌 마케팅 지원 중간 결과물의 전시, 홍보 지원 100%
제 2 절 연구목표의 타당성
1절에서 각 세부연구목표에 대한 내용을 제시하였고, 각각의 연 구목표를 모두 달성하였음을 보였다. 이러한 세부연구목표가 최종목표 인 무재해를 지향하는 스마트 HSE 시스템을 구현하기 위해 반드시 필 요한 내용인지 각각의 목표에 대해 연구의 필요성 및 타당성을 제시하 였다.1. 최종연구목표
스마트 HSE 시스템은 위험이 산재한 건조작업 현장에서 작업장 및 작업자의 상태를 실시간으로 파악하여 안전사고를 사전에 예방하기 위 한 시스템이다. 이를 달성하기 위해 필요한 3가지 핵심기술은 첫째, 작업장 및 작업자의 상태를 파악하기 위한 센싱하고 이를 서버까지 무 손실 전송하기 위한 통신기술이며 본 과제에서는 Private LoRa IoT 통 신을 기본으로 하고 이를 개발하였다. 둘째는 실시간으로 수천개의 end-device에서 센싱된 데이터를 기반으로 작업자의 안전상태를 실시 간으로 분석하고 사고가능성을 예측하기 위한 기술이며, 본 과제에서 는 추론엔진을 활용하여 이를 구현하였다. 셋째는 이동성이 많은 작업 자의 위치를 실시간 파악하여 위험구역 출입여부를 판단하기 위한 위 치추적 기술이다. 이러한 핵심기술을 기반으로 무재해를 지향하는 스마트 HSE 시스 템 개발 목표를 달성하기 위해 세부연구목표를 설정하고 세부연구목표 를 달성하기 위한 세부연구내용을 도출하고 이를 수행하였다.<스마트 HSE 시스템 최종연구목표>
2. 세부목표에 대한 연구 타당성
아래 표는 스마트 HSE 시스템 개발을 위해 핵심기술을 비롯하 여 반드시 개발되어야 하는 서브시스템 개발을 위한 목표와 세부연구 내용을 나열하였다. 세부목표 세부연구내용 연구목표 타당성 HSE 시스템 지원용 유무선 통신 최적화 기술 성능 시험LoRa Gateway와 Network Server 개발 작업장 및 작업자 상태 센싱 정보를 서버까지 끊김 없이 전송하기 위한 핵심기술로서 작업장에 적합한 Private LoRa 네트워크로 구축함 LoRaTM 통신 밀폐공간 성 능평가 사고가 빈번하게 발생하는 밀 폐공간에서의 통신은 수많은 사고예방을 위해 반드시 달성 해야 하는 연구목표임 전파분석 시뮬레이터 성 능평가 수시로 변화되는 건조물에서 전파환경을 즉각적으로 반영
세부목표 세부연구내용 연구목표 타당성 하여 최적의 AP 및 중계기 설 치 위치를 찾기 위해 반드시 필요한 연구임 HSE SW 플랫폼 시작품 개발 HSE 소프트웨어 플랫폼 시작품 여러 작업장에서 발생되는 다 양한 사고 가능성을 예측하고 이를 직관적으로 판단할 수 있는 HSE UI 개발이 필요함 작업장 위험도 예측 기술 HSE SW 플랫폼에서 가장 핵심 이 되는 부분이며, 직접적인 사고를 예방하기 위해 정확한 예측 기술은 필수요소임 작업자 위치추적 기술 작업자의 위치는 사고와 직접 적인 연관이 있으며, 특히 전 파환경이 열악한 작업장내에 서의 위치추적기술은 필수 연 구목표임 스마트 안전장구 및 스마트 게이트 실시간 작업자 안전 모니 터링 시스템 상용 시제품 통합 HSE 시스템을 구축하기 위해 단계적으로 작업자 안전 장구 착용여부를 모니터링하 기 위한 시스템 개발로 HSE 시스템의 서브로서 성공적인 HSE 시스템 가능성을 사전에 테스트할 필요가 있음 스마트 게이트 상용 시제 품 작업자의 위험구역 출입여부 를 파악하여 위험구역에서 발 생할 수 있는 사고를 미연에 방지하기 위해 반드시 필요한 장치 개발임 안전장구용 웨어러블 기 반 기술 연구 작업자의 상태 파악뿐만 아니 라 위험상태에 대해 경고 및 주의메시지를 전달하기 위한 작업자 안전장구 개발을 위한 선행연구임 HSE 플랫폼 기반 응용 서비스 영상기반 공정 모니터링 서비스 기술 개발 건조중인 건축물의 진행여부 는 발주처의 필수요구 사항으 로서 스틸영상만으로도 쉽게
세부목표 세부연구내용 연구목표 타당성 공정 진척도를 파악할 수 있 음 NMEA 기반 선박 안전 모 니터링 시스템 개발 일반 작업장 뿐만 아니라 운 항중인 선박과 선원(승객)의 안전을 지원하기 위한 기술이 며, 향후 적용서비스 시장 확 대를 목표로 개발 중임 HSE 시스템 테스트베드 구 축 HSE 시스템 성능 시험용 테스트베드 구축 개발과정중인 서브시스템 및 핵심기술의 성능시험을 위해 위험가능성이 있는 작업장을 테스트베드로 구축하였음 산학연 협력 네트워크 구축 HSE 시스템 시장분석 및 글로벌 마케팅 지원 개발 제품에 대한 향후 기술 이전 등을 고려하여 홍보 전 시를 지원하기 위한 정책연구 임
제 3 절 수행체계 및 전년도 평가결과 조치사항
1. 연구개발 수행체계
가. 연구체계
n 스마트 HSE 시스템은 크게 복합 구조물에서의 무선통신, 스마 트 HSE 플랫폼, 스마트 게이트 및 다양한 응용서비스로 구성되 며, 아래와 같이 역할분담이 이루어짐n Private LoRa 통신 및 플랫폼 분야에서의 핵심기술은 ETRI에서 담당하고, 통신 모듈 및 스마트게이트와 일부 응용서비스 개발 은 참여기관의 역할로 업무 분담이 이루어짐
나. 참여기관의 세부업무
n ETRI는 통신 및 HSE 플랫폼의 핵심기술 등을 개발하며, 일부 내용은 참여기관과 업무를 공유함 n 참여기관은 4개의 중소기업과 1개의 사단법인으로 구성되었으 며, 중소기업은 기업 전문기술을 극대화 할 수 있도록 업무 분 장하여 스마트 게이트, 선박 안전관리 및 통신 모듈 개발 등을 전문으로 담당하고 법인은 개발 시제품에 대한 홍보 역할을 담 당함2. 전년도 평가결과 조치사항
평가의견 수정·보완사항 -구체적인 연구결과 의 활용과 파급성에 대한 적시 필요 - 현재 개발 중인 스마트 HSE 시스템은 단계별로 개 발이 진행 중이며, 완성 시스템의 활용 및 개발 단계 에서 얻어지는 서브시스템 시제품에 대한 활용에 대 해서는 수행계획서 및 참여기업인 (사)울산TP의 연구 결과에 나타남 현재 개발 중인 실시간 작업자 안전관리 기술, NMEA 기반 선박 안전관리 기술 및 작업자 위치추적 기술은 관련 참여기업으로 기술이전이 되었고 향후 상용화를 위한 작업이 진행되고 있음 -고위험 작업장에서 의 기술검증 필요 - 개발된 스마트 HSE 시스템은 선박 및 플랜트 건조 기업이나 고위험 작업장이 있는 기업이 수요대상이기 때문에 해당 작업장에서 성능평가 등이 이루어져야 하지만, 시험 중의 위험성이 내재되어 있는 실정임 따라서, 당해연도 밀폐공간 및 철구조물이 산재한 유 사기업에 테스트베드를 구축하여 주요기술에 대한 시 험검증을 실시함 현재, 현대중공업과의 업무 협력을 통해 차년도부터 충분한 안전시설을 지원받아서 현장에서 다양한 기술 검증을 위한 시험을 진행할 예정임 -날씨 변화가 많은 현장 상황을 고려한 연구필요 - 현재 개발 중인 스마트 HSE 시스템의 적용 대상은 복합구조물 내에서 작업하는 작업자가 대상이기 때문 에 비/눈에는 크게 영향이 없음- 다만, 온도 및 습도에는 센서의 오동작 가능성이 존재하기 때문에 이러한 주위 환경에 대비하여 센서의 안정성에 대해 시험을 진행하여 예상하지 못한 문제 가 발생하였지만, 향후 상용화를 대비하여 해당 참여 기업에서 방진, 방습에 대비한 기술개발 진행 예정임 -현장 적용, 상용 화, 시장 진출 등에 대한 전략필요 - 본 과제는 중간산출물 또는 최종결과물을 현장에 적용될 수 있는 수준으로 개발하는 목표가 설정되어 있음 이를 위해 시장 및 현황 조사는 참여기업인 (사)울산 TP에 의해 1차년도부터 이루어지고 있으며, 현재 조 선/해양/플랜트 IT 산학연 협의체를 구성하여 글로벌 시장 및 기술에 대한 분석을 진행함 또한, 글로벌 마케팅을 위해 당해연도에 3회에 걸친 국제전시회를 지원하여 결과물에 대한 전시 및 홍보 를 충분히 수행하였음 -예측 불가한 상황 에 대한 대처 능력 및 이를 분석하고 feedback 하는 개발 protocol 이 필요 - 연구개발의 결과물은 실제 이를 기술이전하고 사업 화를 진행할 참여기업 및 유사기업의 요구사항을 반 영하였기 때문에, 해당 기업과의 1개월에 한차례 이 상의 정기 미팅을 통해 개발결과 및 방법이 올바른지 확인하는 절차를 수행하고 있음 - 이를 통해 당해연도에 주요 결과물 및 기술에 대해 4건의 기술이전이 이루어지는 성과를 거둠
제 1 절 국내외 기술동향 및 기술수준 요약
1. HSE 시스템 지원용 유무선 통신 기술 개발
(기술동향) n 조선 및 플랜트 건설현장은 다양한 형태와 크기의 철제 구조물 이 빈번하게 이동하여 통신을 위한 인프라 구축이 어렵고 선박 및 플랜트의 특성상 다수의 밀폐공간이 산재함에 따라 통신환 경이 나쁘고 통신이 불가능한 지역도 많이 존재함. 이러한 환 경에 일반적인 유무선 통신 시스템을 활용하여 통신을 하는 것 은 거의 불가능함. 따라서 이러한 환경에 HSE 시스템을 구축하 기 위해서는 통신의 신뢰성을 보장할 수 있는 통신기법이 요구 됨. n SKT, KT 등 국내 통신사에서는 대우중공업, 현대중공업 등 조 선/플랜트 건설현장에 생산, 물류, 안전 등 다양한 융∙복합 IoT 서비스 기반 인프라로 활용할 수 있도록 Private LTE망을 구축. n LG U plus에서는 ‘LTE 스마트 헬멧’을 비롯해 산업 현장 내 근로자의 안전을 강화하는 산업 현장별 최적화된 ‘IoT 산업 안전 플랫폼’개발을 추진. LTE 망을 기반으로 실시간 원격 영 상 모니터링뿐 아니라 근로자의 위치, 맥박 상태, 유독가스 누 출 여부 등을 센서와 LTE 통신망을 통해 실시간으로 관리 가 능.n 스타트업 기업인 지엔오션에서는 미래과학기술지주, UNIST 와 합작으로 금속격벽이 존재하는 선박 내부에서도 선원끼리 근거 리 통신이 가능한 기술로 금속체 통신 모듈을 개발. 공간속으 로 전자기파를 전송하지 않고 금속을 통해 전파시키는 원리로 선박 깊숙한 곳인 '무선음영지역'에서도 금속 내벽을 이용 최 대 200m 까지 통신이 가능. n SKT는 현대중공업과 함께 조선소 내 작업 생산성 향상 및 긴급 상황에 대응한 상시 연락 체계 구축을 통한 효율적이고 안전한 업무 환경을 제공하기 위해‘펨토셀을 이용한 건조 선박 내부 통신 솔루션’을 개발해 시범서비스를 시행. 이 솔루션은 선박 내의 전력선(PLC: Power Line Communication)과 SKT의 펨토셀 을 연결해 건조 중인 선내 작업자들의 이동통신이 가능하도록 함. n 사물 인터넷(IoT) 전용 네트워크로 고려되고 있는 저전력 광역 통신망(LPWAN)은 10 킬로미터(km) 안팎의 거리에서 기지국당 수백 bps에서 수백 Kbps 정도의 통신 속도를 제공함. LTE, Wi-Fi 등과 같은 기존의 통신 기법에 비해 배터리 하나로 수년 이상 동작할 만큼 전력소모가 작고 통신감도가 높아 조선소, 해양 및 육상플랜트 현장 등과 같은 통신환경이 열악한 작업장 에서의 통신 방안으로 고려되고 있음. 현재 SKT는 전국에 LoRa 망을 구축하여 서비스 하고 있으며 KT는 LTE기반 NB-IoT를 상 용화 하여 현대중공업 등에 구축할 예정임.
n 조선소 또는 건설현장과 같이 주변 구조물 등이 다양한 형태로 놓여있는 산업현장에서는 전파환경을 측정하기 위해 몸에 짊어 지고 측정해야 하므로 경량으로 이동이 용이하면서 조작이 간 편한 측정장비가 요구됨
n Berkeley 사의 dual-band lizard transmitter는 경량으로 690 ~ 2,700 MHz 주파수 대역에서 2개의 신호를 동시에 송신 가능 하고, 2개의 독립적인 1 W 송신모듈을 가지고 있으며, 각각의 송신주파수는 주파수합성기를 사용하여 동적으로 제어가능함. 출력은 0 ~ 30 dBm 까지 0.1 dB의 해상도로 조정 가능함
n Berkeley 사의 Indoor Forecaster 는 두 개의 독립적인 수신 신호 강도(RSSI)를 측정할 수 있는 고속 수신기로, GPS 수신 기가 내장되어 실외에서도 사용 가능하며, Wi-MAX, Cellular, GSM, LMR, PCS, ISM, WCS, ETACS 등의 주파수 밴드를 지원하 고, 이중 수신 모듈을 이용하여 2개의 주파수 밴드를 동시에 스캔할 수 있음
n Keysight 사의 5G Channel Sounder 는 광대역 digitizer, 마이 크로파 down converter, 신호발생기 등으로 구성되어 있어, 지 연프로파일과 도래각(angle of arrival) 등의 정확한 측정을 위해 입출력 제어 소프트웨어 및 교정 지침을 제공하고, 송수 신기의 정밀한 동기화를 지원한다. 채널임펄스응답의 실시간 측정을 지원하며, 최대 44 GHz까지 측정이 가능함
n Rohde & Schwarz 사의 5G 채널사운더는 SMW200A 벡터 신호발생 기와 FSW 신호 및 스펙트럼분석기, 응용 소프트웨어로 구성되
며, 벡터 신호발생기는 최대 500 MHz의 넓은 신호 대역폭과 40 GHz 캐리어 주파수를 제공함 n 선박이나 해양플랜트 건조현장은 내·외부 상세 구조, 작업장 내부 설비 등에 의하여 전파 환경이 크게 영향을 받으므로, 경 로손실 및 지연확산과 같은 작업장 내·외부 전파 환경에 대한 정확한 예측이 요구됨 n 독일 AWE-COM 사의 WinProp는 1990년대부터 상용화된 실내 전 파예측 프로그램으로, 2.5G, 3G, WiMax, WLAN 의 주파수대역에 서 사용 가능하고, Empirical Models (Direct Ray) 및 Deterministic Models (Path Searching) 등의 예측모델을 지원 함. 2D Maps, 위치별 Diagrams, 통계자료를 제공하며 Graphical 빌딩 데이터베이스의 편집이 가능.
n 미국 EDX Wireless 사의 Advanced Propagation Module는 최근 많이 사용되는 전파예측 프로그램으로, 저비용으로 고정밀 site-specific wireless propagation 계산이 가능하며, LTE, WiMAX, Wi-Fi, DAS 및 기타 무선통신시스템에 적용 가능. 2D ray-tracing, 3D indoor ray-tracing, 3D outdoor ray-tracing 모델을 지원하고 path loss, RMS delay/angular spread, Individual 3D ray trajectories 출력이 가능.
(기술수준) n 현재 조선소, 해양 및 육상플랜트 현장에서는 물류, 인력, 공 정 및 안전 관리 등에 ICT 기술을 접목하여 생산성을 높이고 안전한 작업장을 만들기 위해 노력하고 있음. 이를 위해 다양 한 방식의 통신 방식을 현장에 적용하고 있으나 철제 구조물, 밀폐공간 등 작업장의 환경적인 요인에 의해 통신이 어렵거나 불가능 한 곳이 많아 실제로는 큰 효과를 보지 못함. LTE 및 Wi-Fi를 활용한 네트워크의 경우 작업장 안의 일반적인 공간에 서는 통신이 원활한 편이나 밀폐공간 등 폭발, 질식 등의 사고 위험이 높아 안전관리가 반드시 필요한 작업구역에서의 통신을 보장하지는 못함. Ethernet, PLC 등 유선통신의 경우 조선소, 해양 및 육상플랜트 현장의 특성상 구조물의 이동이 빈번하여 인프라 설치가 어려워 안정적인 통신을 위한 수단이 되지 못 함.
n LoRa, NB-IoT 등과 같은 LPWA 통신 기술은 조선 및 플랜트 건 설현장에서 기존 유무선 통신 기법으로는 통신이 어려운 밀폐 공간과 같은 통신 음영지역에서 LTE, Wi-Fi를 대체할 통신으로 기대되고 있으며 이로 인해 조선 및 플랜트 건설현장에 IoT 기 술이 널리 보급되리라 기대하고 있음. 하지만 LPWA 통신 기술 은 원래 개발 목적이 이러한 활용을 위한 것이 아닌 관계로 현 재 정해진 표준에서는 통신을 위한 기본적 기능들을 정의해 놓 은 상태이며 밀폐공간 등에 통신 음영지역에 대한 고려 역시 존재하지 않음. 따라서 LPWA 기술을 조선 및 해양 플랜트 작업
현장에 적용하기 위해서는 관련 기능에 대한 추가적인 정의 및 관련 연구가 필요함.
n Site-specific 전파예측모델로는 UTD(Uniform Geometrical Theory of Diffraction)에 바탕을 둔 광선 추적(ray tracing) 모델이 가장 우수성을 인정받고 있으며, 특히 세부적으로 광선 발사법(ray launching method)과 전기 영상법(image method)이 사용되고 있음 n 광선 발사법은 송신 안테나로부터 등간격으로 다수의 광선 (ray)을 발사한 뒤 각각의 광선을 추적하여 수신점에 도달하는 광선을 찾는 방법으로, 임의의 산란 구조에 대하여 해석이 가 능하다는 장점이 있으나, 수신 안테나에 도달하는 광선뿐만 아 니라 도달하지 않는 광선들도 모두 검색해야 하므로, 상당히 많은 해석 시간이 요구되며, 수신 시험(reception test)의 부 정확성으로 인하여 해석 결과의 정확도도 상당히 떨어지는 단 점이 있음 n 전기 영상법을 이용한 광선추적법은 점대점(point-to-point) 광선추적법의 하나로서 수신시험을 필요로 하지 않고, 정확한 반사점과 회절점을 제공하므로 해석결과가 상당히 정확하며, 해석속도도 상당히 빠른 장점이 있으나, 전기영상을 생성하는 산란체의 결정이 어려워서 복잡한 산란구조에 대한 해석에는 부적합하다는 단점이 있음
2. HSE SW 플랫폼 개발
(기술동향) n Verdantix 사에서 주요 20여개 제조사의 EHS 소프트웨어를 대 상으로 사용용이성, 모바일 지원, 데이터 관리 등의 251개의 기준에 따라 비교 분석한 결과에 따르면, Enablon, Cority, Intelex 등 10개의 제조사 제품이 시장을 주도하고 있는 것으 로 파악됨 n 최근의 안전 서비스 시장의 성장 요인은 작업장의 안전을 보장 하기 위한 수요 증가에 따른 것으로, 작업 프로세스상의 안전 과 작업자 안전 이슈 뿐만 아니라 데이터 및 자산 관리에서의 안전 이슈로 확장됨 n 실내 작업자 위치 측위 기술은 전 세계적으로 다양한 기술들이나오고 있지만 아직 뚜렷한 절대 강자가 없다고 볼 수 있으며, IR-UWB 기술은 전파의 투과성이 좋고 실내 환경에 강건하며, 수십 센티미터 급의 고정밀 측위가 가능하다는 장점으로 Decawave 칩셋을 기반으로 Eliko, OpenRTLS, Ubisense 등에서 제품화하고 있음 n 현재 IR-UWB 기술은 대규모 작업장에 기술을 적용하여 상용화 가능성을 추진해보는 단계로 보여지며, 국내의 경우 아라커뮤 니케이션즈사의 UWB기반 안전관제 시스템 개발, 포스코사의 UWB/RFID 태그를 활용한 u세이프티(u-safety)시스템 등의 적용 사례가 다소 있음 (기술수준) n Enablon의 EHS 소프트웨어는 프로세스 안전 관리, 프로세스 재 해 분석, 작업자의 의료 기록 관리, 모바일 안전 관리 앱, 모 바일 안전 점검 앱, 작업 안전성 분석, 사고 관리, 환경 분석 솔루션 등 HSE와 관련된 다양한 솔루션 등을 종합적으로 지원 함 n Cority사는 환경 관리, 작업자 건강 관리, 안전 관리, 품질 관 리, 작업자 지원 모바일 포탈 등의 솔루션으로 구성된 EHS 소 프트웨어를 개발함 n Intelex사의 EHS 소프트웨어는 사고에 대한 초기 기록, 사고 처리 과정 추적 관리, 사고 원인 및 위험 평가, 사고 보고 (reporting)을 포함한 사고 관리 전체 프로세스와 리스크 관리 프로세스, 재해 정보 보고, 추적 프로세스 등을 지원함.
3. 스마트 안전 장구 및 스마트 게이트 개발
(기술동향) n 스마트 게이트 Ÿ 삼성중공업의 경우 해양 플랜트를 대상으로 작업자 출입관리 를 위하여 게이트를 구성하여 운용 중에 있음. 2014년도부터 6개 호선을 대상으로 출입관리 시스템을 운영 중이며, 해당 호선들의 경우 (주)비피앤솔루션에서 구축 운영을 진행하고 있다. 계약서상의 출입자 인식률은 95% 이상임. Ÿ 현대중공업의 경우 현재는 플랜트 작업 호선이 없어 운용하지 않고 있으나, 2006년부터 14개 호선을 대상으로 작업자의 출입 정보를 관리하는 관리 시스템을 구성하였으며, 해당 호선들 역시 (주)비피앤솔루션에서 구축 및 운영 지원을 진행했음. n 킥스타터에서는 2014년에 '아이캐처(EYECATCHER)'는 스마트폰과 연계하여 작동하여 모든 이미지와 사진을 슬라이드 쇼로 표시 하는 팔찌형 웨어러블 기기를 출시함 n 벨티(Belty)는 프랑스 이모타(Emoita) 사의 2015년에 공개한 스마트한 자동 조절이 가능한 가죽벨트 형태의 웨어러블 기기 로서 버클에 내장된 모터를 이용해 자동으로 크기를 조정해주 며 가속도계 내장으로 피트니스 추적기로도 활용이 가능한 제 품임 n 2016년 LG유플러스와 넥시스의 협업으로 산업현장에서 활용 할 수 있는 LTE 기반의 웨어러블 스마트 헬멧을 출시하여. 헬멧에장착된 카메라와 LTE 모뎀을 통해 근로자의 위치와 상태, 위험 발생 등을 측정하여 실시간 모니터링으로 관리하는 기능을 수 행함 n 스마트캡테크놀로지의 라이프밴드(LifeBand)는 2016년에 공개 된 작업자의 피로상태를 뇌파를 통해 얻을 수 있는 웨어러블 기기로서 건식 EEG 센서의 채택과 블루투스 통신으로 작업자의 산태를 전달하는 기능을 가지며 헤드 밴드 또는 클립을 이용하 여 장착함 (기술수준) n 조선소 또는 건설현장과 같이 주변 구조물 등이 다양한 형태의 작업자 출입구가 존재 하고 있으며, 각 구조물에 맞는 게이트 를 구성하고 있음. 아래와 같이 각 출입구에 맞도록 구성을 진 행하며, 구성을 위하여 파이프를 이용한 간이 게이트를 구성하 여 출입자를 인식하고 있음. n 웨어러블 장비로 수집된 정보를 스마트폰과 같은 전자기기로
사물통신(Machine to Machine: M2M) 방식을 통해 실시간 상호 전송・교환이 이루어지는 연동방식 및 처리속도의 발전과 직접 화 및 경량화로 인해 착용 위화감이 없는 형태로 개발 및 발전 되어 산업현장에 적용되는 안전장구에의 활용도 증가되는 추세 임
4. HSE 관련 서비스 기술 : 영상 기반 공정 모니터링
(기술동향) n 대우건설과 SK 텔레콤은 무선 네트워크를 활용한 클라우드 기 반의 도면관리 시스템, 드론을 활용한 시공단계별 3D 모델링을 통한 시공물량 파악 및 공정관리를 위한 스마트 시공 시스템 등을 포함하는 대우 스마트 건설 기술을 개발하였으며 아산천 안고속도로, 부산시계웅상도로, 인천신항 항로중심 준설현장에 서 드론을 활용해 측량 작업을 수행하고 있음 n 현대엔지니어링에서는 드론으로 대규모 플랜트 건설현장 영상 모니터링하는 시스템을 도입하고 있음 n 삼성물산은 사우디아라비아 복합발전소 건설 프로젝트의 진척 도를 확인하기 위해 드론으로 영상을 촬영하고 있음 n GS건설은 도면 수정, 변경사항 등을 실시간으로 공유하고 공사 관련 문서 저장, 사진 전송 등이 가능한 플랜그리드를 도입하 였으며 서울문산고속도로와 제2남해대교 등의 현장에서 드론을 활용해 측량 및 원격탐사 작업을 수행하고 있음n 한화건설은 이라크 비스마야 신도시 건설현장, 담양성산고속도 로, 한화큐셀코리아 진천공장, 오산열병합발전소 등에서 드론 을 활용하여 준공현장을 촬영하고 있으며 쌍용건설은 동부산 관광단지에 드론을 투입하여 공정사진을 촬영하고 있음 n 한국건설기술연구원에서는 건설현장 안전관리를 위해 드론 및 영상계측 이용 시공 중 안전관리 지원 시스템 개발 중 n 한국도로공사는 안전모에 소형 캠코더를 장착해 고속도로 건설 현장을 모니터링하는 위험작업장 원격안전관제 시스템 도입 n Apprion사에서는 무선통신 장비 통합, 영상 모니터링, RFID, UWB, Wi-Fi, GPS등을 이용한 직원, 물류 위치 추적 시스템, 프 로세스 모니터링 시스템 등을 판매 중
n Autodesk BIM 360 Field 소프트웨어는 BIM 기반의 소프트웨어 로 클라우드를 통해 협업과 보고를 할 수 있도록 하며 도면 탐 색, 수정사항 기록, 작업현장 품질, 안전, 진척도 등을 기록할 수 있는 기능을 제공함 n Asta Powerproject 소프트웨어는 감독관이 스프레드시트에 작 업 진척도를 기록하는 기능과 작업의 비용과 리소스 등을 추적 하는 기능을 제공함 n Bridgit 소프트웨어는 클라우드 기반의 소프트웨어로 멀티미디 어 메시지를 통해 전달되는 사진을 통해 실시간으로 작업 현황 을 파악할 수 있도록 해주는 기능을 제공함 n Creaform Handyscan은 파이프라인 프로젝트의 진척도를 추적하 고 검사하기 위해 개발된 스캐닝 장치로 3D point cloud를 자
동으로 생성하며 작업 상태가 설계 모델과 자동으로 비교되는 기능을 제공함 n BIManywhere 소프트웨어는 BIM모델을 건설현장 어디에서나 접 근 가능하도록 해주며 레이저 스캐닝의 결과물과 BIM 모델 비 교 기능을 제공함 n 뮌헨 대학, 일리노이즈 대학 등에서는 작업현장을 촬영한 영상 을 바탕으로 작업현장에 대한 3D 입체 모델인 point cloud를 생성하고 이를 CAD나 BIM의 입체 모델과 비교하는 방안을 연구 하고 있음 n Cyra사의 Cyrax는 레이저 스캐닝 시스템으로 3차원 모델 생성 소프트웨어와 정밀한 거리 측정이 가능한 센서로 구성되며 스 캐닝한 결과물을 2차원 드로잉, 산업표준 CAD, 그래픽 모델링 시스템들로 변환하는 기능을 제공함 (기술수준) n 공정모니터링을 위한 데이터 수집에는 영상기반 모델링, 레이 저 스캐닝, RFID, Barcodes, UWB, 무선 센서네트워크 등의 기 술이 사용되고 있음
n 3D 레이저 스캐닝과 LIDAR는 원하는 지역에 대한 3D 실제 Point cloud 모델을 자동으로 생성하며 3D, 4D 또는 BIM 모델 로 쉽게 변경이 가능하다는 장점이 있으나 현장에서 모델을 스 캔하는데 많은 시간이 필요하며 고가의 장비가 필요하다는 단 점이 있음
영상을 기반으로 공정을 모니터링하는 사례가 증가하고 있으며 단순하게 일정별로 영상만을 저장, 확인하는 방식, 영상을 기 반으로 point cloud를 생성하여 CAD등의 입체 모델과 비교하는 방식 등이 개발되고 있음
5. HSE 관련 서비스 기술 : 선박 NMEA
(기술동향)n e-Navigation과 관련 EU와 미국에서는 1998년부터 2000년 초반 까지 DISC I, II, PISCES, ATOMOS Family Project, COMMAN, MarNis, ISIT 등 대형프로젝트를 통하여 E-Navigation 환경구 축을 위한 연구개발을 완료하고 그 결과로서 NMEA 2000 네트워 크프로토콜을 IEC 61162-3로 표준화하고 IEC는 NMEA 2000을 SOLAS 선박의 표준 인스트루먼트네트워크로 지정 하였으며, IEC 61162-4 로서 MiTS(Marine Information Technical Standard)를 Shipboard Control Network로 선정함.
n e-Navigation 환경구축은 E-Navigation 대응선박, 지구전역 4S 통신망구축, 항행전자정보, VTS, SAR, 세관, 물류의 S/W 표준 등이 필수요건으로 IMO(International Maritime Organization) 을 기준으로 RTCM, IALA, NMEA 등에서 산업표준을 개정하고 있 음,
n NMEA는 선박 전자장비들의 데이터 송수신을 위한 기술표준기관 으로 1957년 설립되어 NMEA 0183/NMEA 2000, N2K 시험인증 표
준화 등의 활동들을 하고 있으며, 선주들에게 신뢰성 있는 서 비스와 제품을 제공하고 있음.
n NMEA(The National Marine Electronics Association)는 1957년 설립되어져, 현재 40개국, 600여개 회원사를 보유하고 있으며, 주요회원은 제조자, 딜러, 설치자, 대학, 정부기관, 무역자, 보트제조자, 조선소 관계자, 선박관련 협회 등이 있음.
n 선박용 전자 기기의 통신은 RS-232, RS-422, 혹은 RS-485등과 같은 간단한 직렬통신 방식에서 좀 더 체계적이고 효율적인 통 신 규격이 필요하게 되었고 미국의 NMEA (National Marine Electronics Association)에서 NMEA 0183을 제정하여 널리 쓰 이게 되었음. 이에 따라 IMO의 SOLAS 협약에 따라 선박의 의무 탑재 장비에 대한 표준 규격을 관장하는 IEC (International Electrotechnical Committee)에서는 NMEA 0183을 IEC 61162-1 규격으로 채택하게 되었음. 그러나 NMEA 0183은 single transmitter/multiple receiver 형식의 통신규격으로 선박의 인스트루먼트 레벨의 네트워크로 이용되기에는 확장성 등 여러 측면에서 제약이 있었으며, 새로운 개념의 통신 규격이 요구되 었음.
n IEC는 IEC 61162-1의 고속 버전인 NMEA 0183-HS을 IEC 61162-2 로 채택하였으나 역시 single transmitter/multiple receiver 형식을 벗어나지는 않았음. 한편 NMEA에서는 적절한 통신속도 를 보장하며 저렴한 동시에 multi-transmitter/multi-receiver 형식의 인스트루먼트 레벨 네트워크 규격인 NMEA 2000을 제정
하게 되었으며, IEC에서는 이것을 IEC 61162-3으로 채택함. e-Navigation의 도래와 함께 NMEA 2000은 요트 등 소형 선박뿐 만 아니라 대형 선박에서도 널리 쓰이는 중요한 통신 규격이 되어 가고 있어 이 규격의 구현 기술을 확보하는 것은 매우 중 요해지고 있음.
n 특히, NMEA 0183 LS는 IEC61162-1, NMEA 0183 HS는 IEC61162-2, NMEA 2000은 IEC 61162-3 으로 제정하였고, ISO는 NMEA 2000 표준을 SOLAS선박의 표준 네트워크로 인정하였으며, 최근 NMEA OneNet 프로토콜은 Ethernet 기반의 NMEA OneNet 표 준을 개발하고 있음.
n 최근 NMEA 에서는 NMEA 2000 3.101, NMEA 0183 V4.10 표준에 대수정과 권고안 등에 대한 추가 사항들을 논의하고 있으며, NMEA OneNet: The Marine Ethernet Standard 를 중점적으로 추 진하고 있음.
n NMEA OneNet 표준 개정과 관련 Furuno, Mercury Marine, Garmin, Raymarine, Navico, Cisco 산업계 회원사를 중심으로 NMEA 관련 기관들을 중심으로 지속적인 활동들을 추진하고 있 음. (기술수준) n 국내에서는 R&D를 통한 해상 통신 관련 연구개발이 활발히 이 루어지고 있으나, KT,SK 등 대기업 중심의 솔루션이 사업화 되 고 있으며, 시장 상황을 고려하여 응용 기술 개발을 통한 사업
활성화가 필요한 단계임. n 국내 해양레저 시장은 국외에 비해 시장규모면에서는 아직은 초기단계이나 최근 e-navigation 표준화, IoT 기반 기술 활용, 스마트쉽에 대한 요구 증대가 지속적으로 이루어지고 있음. n 최근 국내에서도 해상 사고가 다수 발생함에 따라, 육상/해상 간 통신의 필요성이 증대되고 있으며 기존 SOLAS 선박 시장에 비교해 NON-SOLAS 시장이 60% 이상 넓은 글로벌 마켓을 가지고 있음에 따라, 사업화 가능성이 매우 높다고 볼 수 있음. n 특히, 본 기술개발과 관련되어진 NMEA 게이트웨이 장치는 소수 의 중소기업들만이 특정 센서의 모듈을 관리하는 제품들을 판 매하고 있는 실정이며, NMEA 0183/2000 아날로그 컨버터 모듈 기능만을 탑재하고 있음. n 국내에서도 지능화된 스마트 항해 통신 시스템을 탑재한 선박 에 대한 요구도가 증가하고 있으나, 상용화 제품보다는 연구개 발 단계로 다수 프로젝트가 진행되고 있으며, NMEA 2000 선박 표준화를 통한 통신 분야 중점 기술로 <선박 장치 간 통신 인 터페이스 기술>, <선박 유선 네트워크 구축 기술>, <선내 무선 네트워크 구축 기술>이 요구되어지고 있으며, 본 기술 개발은 선박 장치 간 통신 인터페이스 중점 기술로 지정하고 e-Navigation 표준화를 통해 정부 차원에서 지속적으로 지원하 고 있음.
n NMEA 2000 기반 선박은 CAN(Control Area Network) 통신 백본 망을 기반으로 건조되고 있으며, 소형 레저보트, 요트 등도 표
준화 개정에 따라 NMEA 2000 기반의 변환 컨버터를 탑재하는 등 부분적인 망의 수용을 통해 빠르게 기존 아날로그 제품들을 대체한 컨버터 및 모니터링 시스템의 사용이 급증하고 있음. n 최근 해상 센싱 정보 수집에 필요한 기술로 LoRaWAN을 이용한 다양한 응용 어플리케이션 개발이 급격하게 증가하고 있음. n 사설 사물인터넷(IoT) 전용 LoRa(LoRa)망은 통신 업체와 별도 무선망으로 구축돼 보안이 필요한 각종 데이터를 내부에서만 공유할 수 있다는 장점 때문에 잠재 수요가 큰 시장임. n LoRaWAN망은 비면허 대역인 920MHz 주파수를 사용하고, 신호 전달 속도는 0.3kbps~5kbps임. 전파 최장 도달 거리는 20km로, LPWA 기술을 이용해 넓은 지역 내에서 소량의 데이터를 전송 하는데 효율적인 네트워크 통신 기술임. 특히, LTE 기반 IoT 전용망 LTE-M 에 비해 중계기 가격이 저렴하고 설치가 간편하 다는 장점이 있음.
n SKT, KT, LG-U+ 등 통신업계는 IoT 전용망을 구축, 저렴한 IoT 서비스 시행을 준비하고 있음에도 불구하고, 사설망이 각광받 는 이유는 보안성과 데이터 소유권 때문임. SKT에서 제공하는 LoRa 망은 사용자가 생성하는 데이터를 통신사가 수집할 가능 성이 있음. n 기존 셀룰러망과 달리 국내 통신장비, 단말기 업체들이 진입하 기가 용이. 셀룰러망은 화웨이, 노키아, 에릭슨 등 글로벌 기 업 외에는 개발하기 힘들지만 사설 IoT망은 중소기업이 진입하 기 적합한 시장임.
n 최근에는 조선 불황에 따른 신건조 선박의 급감에 따라, 기존 선박을 수리 및 유지 보수하여 사용하는 선박이 급증하였으며, 선박 내 통신 프로토콜 표준화 개정에 따라, 선박 내 백본망 전체를 교체하려면 매우 고가의 비용이 들기 때문에, 비용 절 감 측면에서 컨버터를 이용한 부분적인 망의 수용에 따라 개발 제품에 대한 수요가 급증하고 있는 상태임. n 특히, 국내에서는 NMEA 2000 기반의 컨버터 사용 제품이 거의 전무한 실정으로 개발시 국내 선박에서 사용하고 있는 국외 제 품들의 수입대체효과와 함께 현재 선박에서 가장 많이 사용되 고 있는 엔진 및 밸브의 기압/온도/습도/가스/유량/유속 등의 RS-422/RS-485 통신 방식의 계측 센서 전용 컨버터 모듈 개발 에 따라, 저비용으로 맞춤형 모니터링 시스템의 구현이 가능 함. n 기존에 NMEA 2000 선박용 센서에 대해 전용 인디케이터를 설치 하여 모니터링하고 있는 제품들은 NMEA 2000에서 사용되어지는 CAN 백본망에 Drop Cable을 이용하여 직접 물려 사용할 수 있 게 구성되어져 있으나, 기존 선박에 백본망을 구성하는 것은 상당한 비용 증가가 요구되어짐. n 국내 선박 IT 시장은 2008년 1.2조원에서 2018년 4.8조원에 도 달할 전망으로, 국내 시장 규모는 수입 규모에 근접한 약 1,200억/년 정도로 추정되며, 2007년 기준으로 우리나라 선박 수주량은 6,033 CGT이고, 선박 건조량은 1,138 CGT 규모로 세 계시장의 40.4%를 점유하는 세계 최고의 선박 건조국으로 NMEA
2000(IEC 61162-3) 표준화, 조선IT융합 기술의 증대에 따라 NMEA 2000 기반의 컨버터 제품의 수요가 급증할 것으로 예상되 어짐. n 국내 개발표준 LoRaWAN망을 연동하여 선박이 연안 항해 시 인 터넷환경을 제공함으로써 다양한 서비스창출이 가능하고, 선박 항만국 통제, VTS 등 선박관제에 활용하는 등 응용분야가 광범 위하게 넓다고 볼 수 있음. n 현재 선박의 표준네트워크에 접속가능한 조선기자재를 개발할 수 있는 환경이 구축되지 않아 우리나라에서는 표준네트워크에 접속가능한 조선기자재 개발 자체가 불가능한 실정에서 본 과 제의 연구 결과물인 테스트베드를 제공함에 따라 조선기자재의 성능 시험이 가능함으로써 개발기반을 가질 수 있음. n E-Navigation 환경 제공의 필수요건인 선박 표준 Instrument network 구축을 가능케 하는 핵심기반을 개발하고 다양한 Application 개발에 활용할 수 있는 기술을 확보하고, IEC 61162-4 국제표준을 이용한 Shipboard Interconnection Network를 구축함으로써 다양한 Application 개발에 활용할 수 있음. n 국제표준을 수용한 첨단 조선기자재를 개발할 수 있는 툴을 제 공함으로써 관련기업의 다양한 조선기자재 개발기술을 지원하 고, 근해 항해 시 LoRa 데이터통신을 이용하여 저렴한 선박 데 이터통신 환경을 제공할 수 있음. n 현재 판매되고 있는 선박 센서용 모니터링 시스템의 경우, 국
외 제품이 다수로 개발되어져 있으나, 솔루션 구축 비용이 매 우 고가로서, 현재 선박에서 사용하고 있는 센서의 종류 및 특 성에 따라 다른 인터페이스와 시스템으로 구현되어져 있음.
6. HSE 관련 서비스 기술 : 센서 데이터 시각화
(기술동향) n 산업 현장에서의 정보 취득 및 축적의 필요성은 제기되어 왔으 며, 현장 도메인별로 센서 시스템을 구축하여 정보 모델 개발 및 분석 예측이 시도되고 있음 Ÿ 예를 들어 엘리베이터 운행 상태, 건물 에어컨 시스템에 센서 를 설치하여 시스템 장치의 예지보전 작업 등 수행 n 대규모 작업장에서 실시간으로 HSE 센서를 설치하여 분석 관리 하는 경우를 찾기 어려우며, 축적된 데이터를 가지고 클라우드 플랫폼을 활용하여 정보 모델 및 다양한 시각화가 가능한 도구 를 제공하고 있음 Ÿ 산업 현장이 아닌 일반 IT 시스템 환경에서는 머신러닝을 통 한 정보 모델 생성 활용을 하고 있으며, 다양한 가시화 도구 를 통해 데이터의 인사이트를 제공하기 위한 연구가 활발함. (기술수준) n 조선소 또는 건설현장과 같은 대규모 작업장을 위한 정보 모델 및 시각화를 제공하기 위한 HSE 센서 데이터 분석 관리 시스템 구축 및 개발은 시작단계에 있음Ÿ 특히, HSE 센서 데이터에 대한 정보 모델 및 시각화 기능 제 공은 관련 도구를 공급하는 업체에서 프로토타입으로 제공하 는 수준임
제 2 절 성과지표 달성실적
본 절에서는 사업 과정에서 개발된 기술의 수준 및 성능을 확인하기 위하여 아래와 같이 6개의 성과지표를 제시하고 목표를 달성한 근거를 각 항목별로 제시하였다. 성과지표 (주요성능 Spec) 단위 기술개발 목표치(‘17) 검증방법 달성수치 전파환경 시뮬레이션 도구 적용 대상 개 플랜트 선박/플랜트 작업 장에서 상용도구적 용 결과와 개발 도 구 결과 비교 검증 플랜트 이동 객체의 작업구역 위치 정합률(작업장 도면기준) % 85% 실환경 구성 후 이 동객체 측위정보를 실 환경맵 위에 도 시하여 확인 90% 이상 작업자 사고 판단 오류 % 15% 시뮬레이션 기반으 로 사고 가능 데이 터 입력 후 판단 결과 비교 10% 동시 관제 작업자 수 (1 sec 이내) 명 4,000명 이상 시뮬레이션 기반으 로 작업자 수 입력 후 처리속도 확인 5,000명 (378 msec) 처리 가능한 사고 유형수 개 3개 이상 시뮬레이션 기반으 로 사고 유형에 따 른 사고 발생 후 사고 유형 분류 정 확도 확인 4개 게이트 입출입 식별 정확도 % 95% (4,000명 기준) 복합구조물에서의 실험에 의한 검증 97.6% (10,755명)1
전파환경 시뮬레이션 도구 적용 대상
1) 성능검증 방법
n 선박 및 해양플랜트 건조현장은 선주사가 위임한 감리회사의 출입 및 작업관리 통제를 받으며, 건조 주체 조선소에서도 계 약된 업무 이외의 작업에 대해서 감리회사의 허가를 받아야 하 는 어려움이 있음 n 보안 및 안전사고에 대한 우려로, 건조중인 해양플랜트 내부에 서의 전파측정이 거의 불가능하고, 현재까지 조선소 선박 및 해양플랜트 작업현장에 적용 가능한 상용 시뮬레이터가 없음 n 이러한 제약조건하에서, 본 과제에서 개발한 전파환경 시뮬레 이터의 성능검증은 아래와 같이 3단계를 통해 수행함. Ÿ 1단계 : 사무빌딩을 대상으로 실측한 전파측정결과와 빌딩용 전파예측 상용 시뮬레이터(WinProp)의 결과 및 본 과제의 개 발 시뮬레이터(ORT)와의 성능을 비교 분석함 Ÿ 2단계 : 해양플랜트 테스트베드(열처리공장) 작업현장에서 1 단계에서와 같이 실측하고, WinProp 와 ORT를 적용하여 성능 을 비교 분석함Ÿ 3단계 : 해양플랜트 CAD 데이터를 이용하여 WinProp 와 ORT를 적용하여 성능을 비교 분석함
2) 성능 달성 실적
가) 빌딩내 사무공간(1단계) 성능 달성 실적
빌딩내 사무공간에 대한 무선 전파측정은 ETRI 12동 건물 내부(4 층)에서 수차례의 전파측정을 통해 실측된 데이터를 수집하였으며, 상 용 시뮬레이터인 WinProp 와 본 과제에서 개발한 ORT를 이용하여 동일 한 전파환경에서 시뮬레이션을 수행하였다. n ETRI 12동(4층) 공간에 대한 설정 파라미터 (1m 간격 평균) 사용주파수(f) 2.38 GHz 송신 안테나 높이(Ht) 2 m 수신 안테나 높이(Hr) 2 m ORT(Offshore Ray Tracer)
반사 횟수 2 회절 횟수 1 투과 횟수 무제한 WinProp 반사 횟수 2 회절 횟수 1 투과 횟수 무제한 n ETRI 12동(4층)내 송신점 위치와 해석 경로 (송신점1, 송신점2)