1. 서론
철도 교량과 같이 반복하중을 받는 시설물은 내구 안 전 확보를 위해 철도차량의 동하중(Dynamic load)을 설 계에 반영한다. 동하중은 차륜 하중(Wheel load)에 의해 레일이 변형되며, 변형된 비율(Strain)이 차량의 하중과 비례한다는 가정을 통해 산출한다. 하지만 자동차를 타고 평평한 직선도로를 주행할 때 자동차의 속도 변화, 현수 장치(Suspension) 상태, 미세한 도로의 요철에 따라 무게 중심의 이동을 느낄 수 있듯이 철도차량 또한 여러 환경 요소에 의해 동적 거동(Dynamic behavior)이 변화하므 로 변형률 만으로 정확한 동하중을 산출하기 어렵다. 따 라서 현재 시설물 설계를 위한 동하중은 측정된 레일 변 형률 값을 통계처리를 통해 환산한 값에 안전율을 반영 하여 산출한다(박수민 등, 2015). 측정 편차 범위를 예측 하고 정확한 동하중을 측정할 수 있다면 시설물 안전을 확보하면서도 보다 비용 효율적인 설계가 가능할 것이다.선로 궤도틀림에 따른 레일 변형률과 진동 변화 동역학 시뮬레이션
김주원 ・ 김용환†Dynamic Simulation of Rail Strain and Vibration Changes According to
Track Irregularity
Ju Won Kim ・ Yong Hwan Kim†
ABSTRACT
The method of utilizing the strain and vibration values of rails is primarily used to diagnose the condition of wheels and railroad facilities. The dynamic load is measured under the assumption that the strain of the rail and the load of the railroad vehicle are proportional. Wheel condition is measured under the assumption that the magnitude of the defect and the magnitude of the rail vibration are proportional. However, environmental factors affecting the strain and vibration of the rail such as vehicle speed, wheel load, climate, and track conditions are not reflected, many errors occur depending on the measurement conditions. In this study, the effect of track distortion, which is a major indicator of the track condition among the environmental factors that affect the strain and vibration of the rail, on the strain and vibration of the rail, was examined through dynamic simulation. As a measure to reduce the measurement deviation, the effect of securing additional measurement points was analyzed.
Key words : Tack irregularity, Dynamic simulation,, Rail strain, Rail vibration, Railway vehicle
요 약 철도시설물 안전 확보를 위한 동하중 관리 및 철도차량 유지보수 효율화를 위한 차륜 상태진단을 위해 레일의 변형률과 진동 값을 이용하는 방법이 주로 사용된다. 동하중은 레일의 변형률과 철도차량 하중이 비례한다는 가정을 바탕으로 측정이 이루어지며 차륜 상태는 결함의 크기와 레일 접촉진동의 크기가 비례한다는 가정을 통해 진단이 이루어진다. 하지만 차량 속도, 차륜 하중, 기후, 선로 상태와 같이 레일의 변형률과 진동에 영향을 주는 환경요소를 반영하지 않으면 측정 조건에 따라 많은 편차가 발생한다. 본 연구에서는 레일의 변형률과 진동에 영향을 주는 환경요소 중 선로 상태를 나타내는 주요 지표인 궤도틀림이 레일의 변형률과 진동에 미치는 영향을 동역학 시뮬레이션을 통해 살펴보고 측정 편차를 줄이기 위한 방 안으로 측정지점 추가 확보에 따른 효과를 분석하였다. 주요어 : 궤도틀림, 동역학 시뮬레이션, 레일 변형률, 레일 진동, 철도차량
Received: 17 February 2021, Revised: 12 March 2021, Accepted: 13 March 2021
†Corresponding Author: Young Hwan Kim
E-mail: [email protected]
철도차량 차륜은 차량의 하중을 레일로 전달하는 중요 한 부품으로 차륜의 결함은 소음, 진동을 유발할 뿐 아니 라 심각한 경우 탈선의 원인이 된다. 차륜은 쉽게 교체하 거나 수리할 수 있는 부품이 아니므로 안전 확보와 정비 효율 향상을 위해 결함이 발생한 차륜을 선별 정비하고 자 하는 노력이 이루어지고 있다. 차륜의 결함은 레일의 변형률과 차륜-레일 간 충격에 의한 진동 신호 분석을 통 해 확인할 수 있으나 진동 신호의 크기는 동하중과 마찬 가지로 차량의 거동에 영향을 주는 환경요소에 의해 편 차가 발생하므로 측정 환경을 제한할 수 있는 일부 전동 차량을 제외한 다른 철도차량에는 차륜 진단기술을 활용 하지 못하고 있다. 또한, 차량 주행 안전에 위험 요소로 작용하는 화물 과적(Over load)․편적(Load deviation) 감 지를 위해서도 레일의 변형률과 진동의 정확한 측정은 중요하다. Fig. 1은 차륜이 레일 위를 통과할 때 차륜 하중 (Wheel load)에 의한 레일 탄성 변형(Elastic deformation) 과 차륜 표면에 발생된 결함(Wheel defect)에 의한 진동 (Vibation)을 나타낸 그림이다. 차량의 동적 거동이 매우 안정된 이상적인 조건(Ideal condition)에서 차륜의 하중 은 레일의 변형률과 비례하며 차륜 결함 크기는 진동 (Vibration)의 크기와 비례 하므로 비교를 통해 정상․결 함을 구분해낼 수 있다. 하지만 실제 현장에서는 차량 속 도․하중 변화, 차륜․레일 표면결함, 불규칙한 선로 상 태가 존재하므로 불규칙한 차량 동적 거동에 의한 편차 가 발생하여 정상․결함 구분이 어렵게 된다.
Fig. 1. Conceptual diagram of the relationship between wheel
and rail in ideal condition
본 연구에서는 동역학 시뮬레이션 기법을 통해 편차를 발생시키는 환경요소인 궤도틀림에 따른 레일 변형률-진 동 변화를 살펴보고 그 분석 결과를 동하중 측정 및 선로 설치형 차륜 결함진단 장치의 정확도 향상을 위한 자료 로 활용하고자 한다. 또한, 측정 편차를 줄이기 위한 방안 으로 측정지점 추가 확보에 따른 효과를 분석하여 최적 의 측정지점 수와 편차의 감소량을 예측하였다. Fig. 2는 레일의 변형률과 진동을 측정하기 위해 사용되는 센서의
형태로 Fig. 2(a)는 열차 동하중(Weight In Motion) 측정
을 위한 스트레인게이지의 설치 예(김현민 등, 2009)이며
Fig. 2(b)는 스트레인게이지 방식의 로드셀과 진동센서가 내장된 레일 센서의 설치 예 이다. 본 연구에서는 Fig. 2(b)와 같은 센서가 레일에 설치된 상황을 모사(Imitate)
하여 시뮬레이션을 수행하였다.
(a) Strain-gauge for WIM (b) Wheel sensor
Fig. 2. Rail strain and vibration measuring device
installation examples
2. 본론
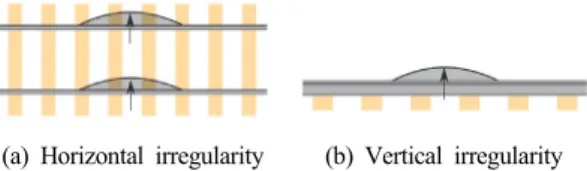
2.1 궤도틀림 경향분석 및 시뮬레이션 구간 추출 선로는 철도차량 주행에 따른 반복하중과 지반 침하, 기후에 의한 영향으로 시간에 따라 변형이 발생하며 이 로 인한 레일의 변형을 궤도틀림(Track irregularity)이라 고 한다. 궤도틀림은 철도차량의 탈선까지 유발할 수 있 는 주행 안전과 직결된 중요한 요소이기 때문에 기존 연 구는 궤도틀림에 따른 차량의 동적 거동을 분석한 연구 (강부병, 2017)를 비롯하여 차량의 동적 거동을 통해 궤 도틀림 수준을 식별하는 연구(김성용 등, 2010) 등 주로 차량을 중심으로 궤도틀림과의 상관관계에 관한 연구가 이루어졌다. 하지만 레일의 변형률과 진동에 관한 연구는 교량 설계를 위한 동하중 측정, 레일의 유지보수와 관련 된 일부 연구 사례를 제외하고 찾아보기 어려운 상황이 다. Fig. 3은 궤도틀림에 대한 개념을 나타낸 개략도로 Fig. 3(a)는 진행 방향의 좌우로 레일이 변형된 방향틀림 을 나타내고 Fig. 3(b)는 진행 방향의 상하로 레일이 변 형된 고저틀림을 나타낸다.(a) Horizontal irregularity (b) Vertical irregularity
궤도틀림과 레일 변형률, 진동과의 상관관계 분석을 위 해서는 궤도틀림 크기에 대한 기준이 필요하다. 현재 유 지보수를 위해 사용되는 국가철도공단의 선로 유지관리 지침(국가철도공단, 2020)에서는 허용 속도에 따라 5단계 로 궤도틀림 크기를 관리하고 있지만, 선로 대부분이 2단 계(목표기준)~3단계(주의기준) 사이로 관리되고 있으므로 변별성이 떨어진다. 따라서 궤도틀림의 표준편차를 숫자
로 표현한 궤도 품질지수(Track Quality Index)를 이용하 여 궤도틀림이 양호한 구간부터 양호하지 않은 구간을 구 분하였다. 국내 철도 운영기관에서 주로 사용하는 궤도 품질지수 계산 방법은 식(1)과 같이 평가구간에서 0.25m 또는 0.5m마다 측정한 레일의 고저, 방향틀림 값의 표준 편차를 이용하는 것이다.(이방우 등, 2018) 식(1)에서 N 은 측정값의 개수이며 는 측정지점에서의 개별 측정값, 는 궤도 품질지수 평가구간 내 궤도틀림의 평균값 이다.
(1) 궤도 품질지수 평가구간의 길이는 보통 200m, 500m, 1,000m 간격으로 설정하는데(오경철 등, 2014) 본 연구 에서는 Fig. 2(b)와 같이 레일에 센서가 부착된 상황을 모사할 것이므로 가장 짧은 간격인 200m를 기준으로 궤 도 품질지수를 평가하였다. 이를 위해 궤도검측차를 통해 측정한 천안 → 대전 경부 기존선 10m현 궤도틀림 데이 터에서 교량, 터널, 역, 급경사, 곡선 구간을 제외하고 센 서 장착이 용이한 200m 길이의 직선 구간의 샘플 24개 를 추출하였다. 차량 통행이 빈번하고 선로 유지보수가 주기적으로 이루어지는 구간이기 때문에 추출한 샘플이 일반적인 현장 선로 조건을 반영할 수 있을 것으로 예상 하였다. 소요 시간 문제로 모든 샘플에 대한 시뮬레이션 을 수행할 수 없었으므로 각 샘플의 방향틀림, 고저틀림 값을 통해 궤도 품질지수를 산출한 후 대표성을 가질 수 있을 것으로 판단한 크기가 각기 다른 4개의 시뮬레이션 케이스(case)를 최종 선택하여 선로 모델로 사용하였다. Fig. 4는 추출한 24개 샘플구간의 궤도 품질지수의 빈도 수를 나타내는 그래프이다. 방향틀림의 궤도 품질지수는 최저 0.75, 최대 2.58 사이로 비교적 고르게 분포하였고 고저틀림은 최저 0.78, 최대 4.36으로 방향틀림과 비교해 비교적 큰 차이를 나타내었다. 샘플 중 TQI 2미만 값을 가진 구간은 방향틀림의 경우 79%, 고저틀림의 경우 71% 로 나타나 선로 대부분이 TQI 2미만으로 관리되고 있음 을 알 수 있다. 따라서 선로 상태가 매우 양호한 Case 1, 일반적인 수준의 Case 2, 선로 상태가 좋지 않은 Case 3 과 함께 샘플중 가장 TQI 수치가 크며 구간 내에 레일 분 기기(Rail switch)가 위치한 Case 4를 추가 선택하여 시뮬레이션을 수행하였다.
Fig. 4. Irregularity distribution of samples
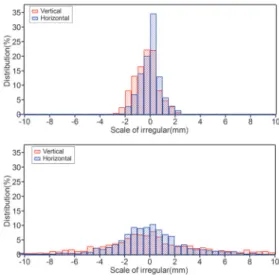
Fig. 5는 시뮬레이션 대상 케이스의 궤도틀림 분포를 나타낸 그래프로 궤도 품질이 좋은 Case 1은 틀림크기가 대부분–2~2㎜ 구간에 집중되어 편차가 적은 레일 상태 를 보여주고 있지만, 궤도 품질이 좋지 않은 Case 4는 – 8~10㎜에 걸친 넓은 편차로 궤도 품질이 좋지 않은것을 확인할 수 있다. Table 1은 시뮬레이션 대상 케이스 1~4 의 궤도 품질지수 값을 나타낸 표이다.
Index Track Quality Index(TQI) * Vertical Horizontal Case 1 0.8966 0.7496 Case 2 1.6899 1.0605 Case 3 4.0776 2.5577 Case 4 4.3558 2.5758
* The higher TQI value, the worse track condition Table 1. TQI of the simulation case
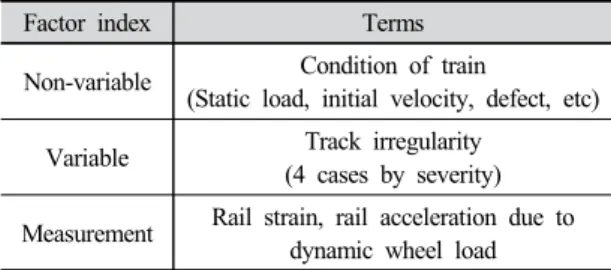
2.2 시뮬레이션 구성 2.2.1 관찰계획 수립 철도차량 주행 시 레일에서 발생하는 변형과 진동의 크기는 시간에 따른 차륜-레일 접촉력의 크기와 방향에 따라 결정된다. 접촉력의 크기와 방향은 차량의 동적 거 동(Dynamic behavior)에 의해 변화되며 동적 거동은 차 량의 하중․속도, 차륜․레일의 결함, 선로 상태에 영향 을 받는다. 본 연구에서는 차량의 하중․속도가 일정하며 차륜․레일에 결함이 존재하지 않는 상황을 가정하고 선 로 상태 지표인 궤도틀림의 크기 변화에 따른 레일 변형 률(Strain)과 진동 가속도(Acceleration) 값을 확인하였다.
Factor index Terms
Non-variable Condition of train
(Static load, initial velocity, defect, etc) Variable Track irregularity
(4 cases by severity) Measurement Rail strain, rail acceleration due to
dynamic wheel load
Table 2. Variable condition and measurement factor
2.2.2 시뮬레이션 도구 선정
철도차량의 동적 거동에 의한 레일 변형률, 진동 예측
을 위해 다물체 동역학(Multi body dynamic) 해석 소프트 웨어인 Computational mechanics의 Universal mechanism 8을 이용하였다. 다물체 동역학 해석은 철도차량을 구성 하는 각 요소의 결합 구조 및 관성․마찰․탄성에 의한 상대운동 특성을 구현할 수 있으므로 차량의 동적 거동 을 비롯해 레일의 변형, 진동을 관찰할 수 있다. 일반적으 로 다물체 동역학 해석은 해석 시간 단축을 위해 구성요 소를 변형이 없는 강체(Rigid body)로 가정하지만 본 연 구에서는 레일의 변형을 고려해야 하므로 차량은 강체로 가정하되 레일은 강체 침목을 지지점으로 하는 유연 요소 (Flexible element)로 모델링하고 레일의 변형 해석은 전 단변형의 효과를 고려할 수 있도록 티모셴코 빔 이론을 적용하였다(박순응 등, 2006). Fig. 6은 시뮬레이션에서 가정한 선로 레이아웃으로 차륜(Wheel)과 침목(Sleeper) 은 강체이며 차륜이 이동함에 따라 유연 레일요소(Rail element)가 변형되며 ⓑ지점의 변형률과 진동값을 관찰 한다.
Fig. 6. Layout of rail model(a:wheel, b:rail element, c:sleeper)
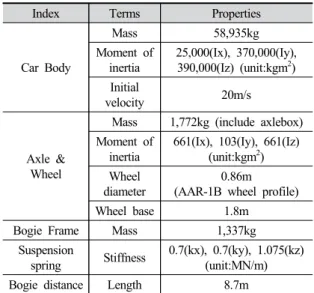
2.2.3 시뮬레이션 조건 설정 시뮬레이션 수행을 위해서는 차량 모델과 선로 모델이 필요하다. 국내에서 운영 중인 여러 철도차량 중 화물차 량을 시뮬레이션 모델로 선택하였다. 화물차량은 국내에 서 운영되는 철도차량 중 차량수가 가장 많고 화물 적재 에 따른 과적 또는 편적의 우려가 있어 다른 철도차량에 비해 하중과 차륜 관리의 중요성이 크다. 동역학 시뮬레이 션을 위한 화물차량의 물성치는 기존 문헌(장승호 등, 2006; 이승일, 2003)과 화물차량 도면 검토를 통해 실제 운영 중인 차량의 물리적 특성을 반영할 수 있도록 하였다. 차량 의 하중은 화물을 최대로 적재한 상태를 가정하여 68,697kg 으로 설정하였으며 차량 부품은 강체로 가정하였다. 철 도차량의 특성인 연결된 차량에 의해 발생할 수 있는 변 형률, 진동 특성을 확인할 수 있도록 동일한 차량 3량을 연결기(Coupler)로 연결하여 초기속도 20m/s로 선로 위 를 주행하는 상황을 모사 하였다. 동역학 해석을 위해 차량 레이아웃과 적용한 물성치는 Fig. 7 및 Table 3과 같다.
Index Terms Properties Car Body Mass 58,935kg Moment of inertia 25,000(Ix), 370,000(Iy), 390,000(Iz) (unit:kgm2) Initial velocity 20m/s Axle & Wheel
Mass 1,772kg (include axlebox) Moment of
inertia
661(Ix), 103(Iy), 661(Iz) (unit:kgm2)
Wheel diameter
0.86m (AAR-1B wheel profile)
Wheel base 1.8m
Bogie Frame Mass 1,337kg
Suspension
spring Stiffness
0.7(kx), 0.7(ky), 1.075(kz) (unit:MN/m) Bogie distance Length 8.7m
Table 3. Properties of train model
선로는 궤도틀림 데이터를 추출한 구간과 동일한 조건 으로 설정하였다. 레일의 두부 답면 프로파일(Head surface profile)은 차량 거동에 많은 영향을 주는 요소이므로 현 장 조건을 반영할 수 있도록 경부 기존선 구간에 가장 널 리 쓰이는 KS50N을 적용하였다(허현무 등, 2005). 레일 변형률과 진동 측정지점은 Fig. 8과 같이 2.1절을 통해 추출한 200m 구간의 중간이다. 측정지점 추가 확보에 따 른 편차 감소 효과를 확인하기 위해 차륜 원주 길이와 침 목 간격을 고려하여 좌우 레일의 침목 사이에 각 5개씩 10개의 센서를 설치하는 상황을 모사하였다.
Fig. 8. Layout of rail model
시뮬레이션 결과를 현장에서 참고할 수 있도록 현장
환경을 반영해 시뮬레이션 조건을 설정하였으나 기후, 레
일, 차륜 마모 및 결함에 따른 변인은 고려하지 않았다는
점을 참고해야 할 것이다. Table 4는 시뮬레이션에 사용
한 선로 모델의 물성치이다.
Index Terms Properties
Shape
Rail profile KS50N Rail inclination 1/40
Track type Tangent
Length 200m
Sleeper spacing 0.6m
Material
Young’s modulus 210Gpa Poisson’s ratio 0.25
Density 7.85g/cm3
Damping ratio 0.001
Table 4. Properties of rail model
2.3 궤도틀림과 레일 변형률 상관관계 분석 궤도 품질지수의 크기에 따라 분류한 4가지 Case에 대 해 동역학 시뮬레이션을 시행하고 레일변형률과 궤도틀 림과의 상관관계를 분석하였다. Fig. 9는 궤도틀림 크기 차이에 의한 레일의 수직 변형률을 시간의 흐름에 따라 볼 수 있도록 나타낸 그래프이다. 측정지점은 Fig. 8의 1 번 지점으로 12개의 차축이 센서 위를 지나가면서 나타 나는 변형률을 확인할 수 있으며 궤도틀림이 큰 Case 4 는 Case 1과 비교해 최대 변형률을 보이는 붉은 원 위치 의 형태가 불규칙한 것을 발견할 수 있다. 이는 궤도틀림 량이 클수록 차량의 불규칙 상하 거동(Bouncing)이 증가 하여 차륜과 레일의 접촉력에 변화가 생기는 이유로 판 단된다. Table 5는 상하 거동에 의한 편차를 확인하기 위 해 1번 센서 위치에서 확인된 수직 변형률값을 정리한 표 로서 동일 하중의 차륜에서도 궤도틀림에 따라 차축 간 약 6~14%의 편차가 나타날 수 있음을 예상할 수 있다.
Index Max (a) Min (b) Deviation (a)-(b) 1-(b)/(a) Case 1 0.8452 0.7947 0.0504 5.97% Case 2 0.8431 0.7900 0.0531 6.30% Case 3 0.8406 0.7264 0.1142 13.59% Case 4 0.7949 0.6827 0.1122 14.12%
Table 5. Strain value and deviation for each case between axles
(a) Case 1
(b) Case 2
(c) Case 3
(d) Case 4
Fig. 10. Strain value at left and right rail
변형률 차이는 좌․우 차륜에도 확인되는데 Fig. 10은 1, 2번 위치에서 측정된 좌우 차륜의 수직 변형률 값을 차축별로 나타낸 그래프로 궤도틀림량이 클수록 좌우 레 일 간의 변형률 차이도 벌어지는 것을 확인할 수 있다. 이는 차량의 불규칙 롤링(Rolling)에 의한 것으로 예상되 며 1,2번 위치에서 확인된 변형률 평균값과 동일한 축에 서 좌우 레일의 변형률의 편차를 Table 6에 정리하였다. Case 1의 경우 12개 축의 평균 변형률 값은 0.8195이며 좌․우 레일에서 가장 큰 편차는 7번 축에서의 0.0302로 비율로 환산하면 약 3.68%이다. Case 4의 경우 최대 22.05% 편차가 발생되어 궤도틀림이 클수록 좌․우 편 차가 축간 편차보다 크게 나타날 것으로 예상된다. Index Average Strain (a) Deviation of strain Max (b) Average (b)/(a) Case 1 0.8195 0.0302 0.0171 3.68% Case 2 0.8235 0.0337 0.0196 4.10% Case 3 0.7953 0.1183 0.0631 14.88% Case 4 0.7777 0.1715 0.0652 22.05%
Table 6. Strain value and deviation for each case at left-right rail
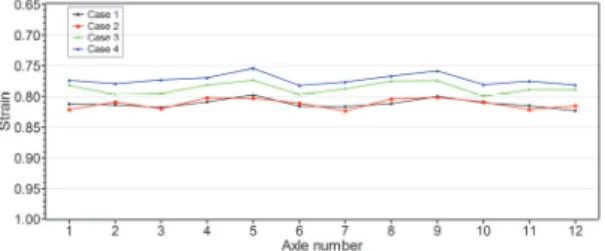
실제 현장에서 동하중을 측정하는 경우 센서 장착 시 간, 비용 문제로 한 지점에만 센서를 설치하는 경우가 대 부분인데 시뮬레이션 결과와 같이 좌우 차륜의 변형률 편차가 크게 발생할 수 있다는 점을 고려해야 하며 향후 현장 측정 방법과 측정 위치에 대한 가이드라인 수립 검 토가 필요하다고 판단된다. 2.4 변형률 편차 감소를 위한 측정지점 추가 효과 분석 차량의 불규칙 거동에 의한 차축 간, 좌우 레일 간 편 차는 측정지점을 추가하여 감소시킬 수 있다. 측정지점 추가에 따른 편차 감소 효과를 확인하고 센서 설치 비용 과 직접적인 상관관계가 있는 최적 측정지점 수를 검토 하였다. Fig. 11은 1~10번 센서에서 관찰된 변형률의 평균값 을 나타낸 그래프이다. 10개 센서값을 평균하면 궤도틀 림이 큰 경우에도 비교적 일정한 편차를 나타내는 것을 확인할 수 있다. 다만, Fig. 11의 각 Case별 추세를 살펴 보면 Case 1과 비교해 Case 4가 전반적으로 변형률 값이 낮게 나타나는 것을 확인할 수 있다. 10개 센서의 평균값
을 이용한 Fig. 11 조건에서 Case 1과 Case 4의 변형률 평균값의 차이는 약 5.8%이다. 다시 말해 추가 측정지점 확보를 통해 측정 편차를 감소시킬 수 있지만, 궤도틀림 이 큰 경우 평균값이 낮게 나타나 궤도틀림을 제외한 다
른 조건이 같을 때 궤도틀림이 큰 구간에서 측정된 동하 중이 궤도틀림이 작은 구간에서 측정된 동하중에 비해
과소 평가된다는 점을 고려해야 할 것이다.
Fig. 11. Strain value of average value of sensor 1~10
센서의 최적 설치 개수를 예측하기 위해 측정 지점 추 가에 따른 표준편차 감소량을 확인하였다. Fig. 12는 Fig. 8과 같은 순서대로 측정지점을 1개에서 10개까지 늘릴 때 줄어드는 표준편차를 나타낸 그래프이다. 측정지점이 늘어남에 따라 편차는 감소하였으며 0.01 부근에서 수렴 하였다. 궤도틀림 상태가 양호한 Case 1,2의 경우 측정지 점 4개 이상부터 표준편차가 0.01이하로 줄어들었다. Table 6에서 Case 1,2의 평균 변형률이 0.8215임을 고려 할 때 편차 비율은 약 1.2% 이다. Case 3의 경우 측정지 점 5개 이상부터, Case 4의 경우 9개 이상에서 표준편차 가 0.01이하로 줄어들었다. 변형률 편차 감소를 위해 측정지점 추가 효과를 분석 한 결과 궤도틀림이 클수록 효과가 크고 분기기가 존재 하는 Case 4와 같은 특별한 선로 조건을 제외하고 4개 이상의 측정지점을 확보하면 궤도틀림에 관계없이 1~2% 편차 수준의 양호한 변형률 측정값을 얻을 수 있을 것으 로 예상된다.
Fig. 12. Strain deviation according to the number of
measuring point 2.5 궤도틀림과 레일 진동 상관관계 분석 차륜의 하중에 의한 레일의 변형은 침목을 지지점으로 하는 빔의 처짐과 같으므로 차륜이 통과할 때마다 돌출 된 형태로 나타나 시각적 식별이 용이하다. 반면 레일 진 동은 차량의 하중뿐 아니라 앞, 뒤 차륜에서 전달되는 진 동을 비롯해 시간에 따라 변화하는 차륜-레일의 접촉, 탄 성 조건에 영향을 받으므로 신호 수집 주기(Sampling rate) 와 신호 처리 방법에 따라 여러 가지 형태로 나타난다. 신호 수집 주기 차이에 따른 진동신호 패턴을 확인하기 위해 Case 4 궤도틀림 조건에서 신호 수집 주기를 1kHz 와 10kHz로 달리하여 동역학 해석을 수행하고 1번 센서 에 수집된 진동데이터와 변형률 데이터를 Fig. 13에 나타 내었다. 변형률과 진동 상관관계를 효과적으로 나타내기 위해 절대값을 적용하여 그래프를 작성하였다.
(a) 1kHz sampling rate
(b) 10kHz sampling rate
Fig. 13. Acceleration and strain value according to
sampling rate
Fig. 13(a)와 Fig. 13(b)를 비교해 보면 신호 수집 주기 와 관계없이 변형률 데이터는 유사한 패턴을 보이는 것을 확인할 수 있다. 하지만 진동데이터는 큰 차이를 보이는 데 10kHz 결과에서는 변형률의 최대값과 진동가속도의 최대값이 동일한 시간대에서 관찰되나 1kHz 결과에서는 시간대가 일치하지 않으며 값의 크기도 일정하지 않은 것 을 확인할 수 있다. 20m/s로 이동하는 차량의 차륜 결함 확인을 위해서는 10kHz 수준의 신호 수집 주기를 확보해 야 신뢰성 있는 데이터를 얻을 수 있을 것으로 예상된다. Fig. 13(b)에서 차륜이 통과하면서 나타나는 변형률 주 변으로 일정한 진동패턴이 발생함을 확인할 수 있는데 진 동 발생 시간을 계산한 결과 차륜이 침목 위를 지나는 시 간과 진동패턴이 일치하는 것을 확인할 수 있었다. 이는
침목 위에서 레일 처짐이 적게 발생하므로 레일 탄성을 통한 에너지 흡수량이 적어져 상대적으로 진동 값이 크게 나타는 것으로 예상된다. 궤도틀림과 진동과의 상관관계 분석을 위한 기준값으로 차륜이 측정 위치의 앞․뒤 침목 을 밟는 순간에 발생하는 진동 값의 평균값을 이용하였다. Fig. 14는 1, 2번 센서에서 측정된 수직 방향 진동가속 도의 크기를 나타낸 그래프이다. 궤도틀림이 클수록 불규 칙한 경향을 보이는 것은 변형률 패턴과 유사하지만, 전 반적으로 차축 간의 차이가 크게 발생하고 짝수 번 차축 의 진동가속도 크기가 홀수 번 진동가속도의 크기보다 작게 나타난다. 이 패턴은 궤도틀림의 크기가 커질수록 불규칙해지는 것을 확인할 수 있다. (a) Case 1 (b) Case 2 (c) Case 3 (d) Case 4
Fig. 14. Rail vertical acceleration value for each case
Table 7은 차축 간에 발생하는 편차를 확인하기 위해 1번 센서 위치에서 확인된 수직 진동 가속도 값을 정리한 표로써 궤도틀림의 크기에 비례하여 진동가속도 값의 차 이가 벌어지는 것을 확인할 수 있으나 궤도틀림이 양호한 Case 1의 경우에도 약 15.37%의 높은 편차가 나타났다. Index (unit:m/s2) Max (a) Min (b) Deviation (a)-(b) 1-(b)/(a) Case 1 30.8910 26.1425 4.7485 15.37% Case 2 29.7892 23.7750 6.0142 20.19% Case 3 30.8540 22.3663 8.4878 27.51% Case 4 30.1432 21.5670 8.5763 28.45%
Table 7. Acceleration value and deviation for each case
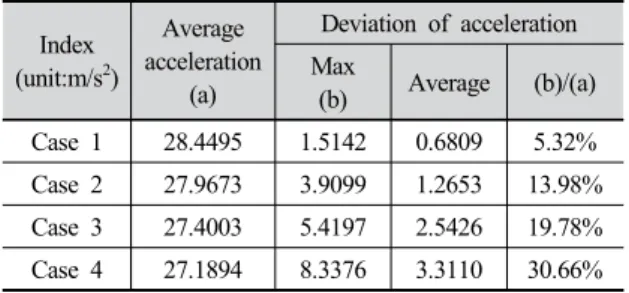
between axles Table 8은 1,2번 센서 위치에서 좌․우 차륜에 의해 발생하는 진동가속도의 편차를 정리한 표이다. Case 1의 경우 좌․우 차륜에 의해 발생하는 진동 가속도 값의 평 균은 28.4495m/s2이며 가장 큰 차이가 발생한 차축은 5 번 차축으로 크기는 1.5142m/s2으로 평균값과 비율로 환 산하면 5.32% 이다. 궤도틀림량 증가에 따라 진동가속도 의 편차는 최대 30.66%까지 늘어났다. Index (unit:m/s2) Average acceleration (a) Deviation of acceleration Max (b) Average (b)/(a) Case 1 28.4495 1.5142 0.6809 5.32% Case 2 27.9673 3.9099 1.2653 13.98% Case 3 27.4003 5.4197 2.5426 19.78% Case 4 27.1894 8.3376 3.3110 30.66%
Table 8. Strain value and deviation for each case at
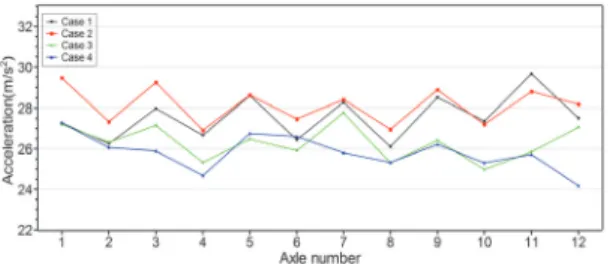
left-right rail 2.6 진동 편차 감소를 위한 측정지점 추가 효과 분석 측정지점 추가를 통한 진동 편차 감소 효과와 최적의 센서 설치 수를 검토하였다. 2.4절과 같은 방법으로 측정 지점 추가에 따른 편차를 확인하기 위해 Fig. 15에 1~10 번 센서에서 관찰된 진동가속도의 평균값을 그래프로 나 타내었다. Fig. 15를 보면 같은 방법으로 변형률 편차를 분석한 Fig. 11에 비해 편차가 비교적 크게 나타나고 있다. 진동 은 레일을 통해 쉽게 전달되므로 측정지점을 통과하는
차륜의 앞․뒤에 위치한 차륜에 의해 발생되는 진동의 영향이 중첩되어 변형률에 비해 편차가 크게 나타나는 것으로 예상된다. Fig. 16은 측정지점 증가에 따른 표준 편차 감소량을 나타낸 그래프로 비교적 완만하게 편차 가 감소하여 1.2m/s2 부근에서 값이 수렴되는 것을 확인 할 수 있다. Case 1과 Case 3이 편차 값이 교차하는 위 치를 고려할 때 7개 이상의 측정지점을 확보하면 궤도 틀림에 따른 진동 크기 편차는 거의 상쇄될 것으로 예 상된다.
Fig. 15. Acceleration of average value of sensor 1~10
Fig. 16. Strain deviation according to number of
measuring point 진동값은 전반적으로 변형률과 비교해 편차가 크게 발 생하므로 차륜의 결함을 정확히 판별해 내기 위해서는 진동 값의 크기와 함께 진동 주파수분석과 같은 후처리 기법에 관한 추가 연구가 필요할 것으로 판단된다.
3. 결론 및 향후 계획
본 연구에서는 현장 조건을 반영한 동역학 시뮬레이션 을 통해 선로 궤도틀림이 레일의 변형률과 진동에 주는 영향을 살펴보았다. 궤도틀림 값이 클수록 차량의 불규칙 거동으로 인해 변형률과 진동 측정값의 편차가 커질 것 으로 예측되었으며 측정지점을 추가하면 효과적으로 편 차를 감소시킬 수 있는 것을 확인하였다. 최근 레일 센서 설치․해체 소요 시간을 대폭 단축할 수 있는 센서 모듈 이 개발되어 이를 활용한다면 본 연구 결과를 현장에서 도 활용할 수 있을 것으로 생각된다. 본 연구를 통해 확 인한 시사점과 향후 계획은 다음과 같다. (1) 궤도틀림에 따른 레일 변형률의 평균값은 궤도틀 림 증가에 따라 감소 되었으며 궤도틀림이 가장 작은 Case 1과 가장 큰 Case 4를 비교하면 Case 4의 변형률 평균값이 5.8% 작게 예측되었다. 이는 궤도틀림이 큰 구간에서 측정된 동하중이 실제값 보다 과소 평가 될 수 있음을 의미한다. (2) 궤도틀림이 커짐에 따라 차축 간, 좌․우 레일 간 변형률 편차가 증가하며 차축 간 편차는 최대 14.12%, 좌․우 레일 간 편차는 최대 22.05% 발 생하는 것으로 예측되었다. 이는 현재와 같이 한 지점에서 측정한 값을 사용하여 동하중을 예측할 경우 큰 오차가 발생할 수 있음을 의미한다. (3) 변형률 측정 편차 감소를 위해 측정지점 추가 효과 를 분석한 결과 분기기와 같은 특별한 선로 구조물 이 없는 일반 선로 조건이라면 궤도틀림의 크기와 관계없이 4개 이상의 측정지점 확보를 통해 측정 편차를 1~2% 수준으로 감소시킬 수 있을 것으로 예상된다. (4) 레일의 최대 진동 값은 차륜이 침목을 통과하는 순 간이며 동일한 대차에서 선행 차륜(홀수 번 차축) 의 진동 값이 크게 나타났다. 궤도틀림이 커짐에 따라 레일 진동값의 편차도 함께 증가하였으며 차 축 간 편차는 최대 28.45%, 좌․우 레일 간 편차는 최대 30.66%로 나타나 변형률과 비교해 더 큰 편 차가 발생하는 것으로 예측되었다. 이는 앞․뒤에 있는 차륜의 진동이 전달되어 나타나는 현상으로 예상된다. (5) 진동측정 편차 감소를 위해 측정지점 추가 효과를 분석한 결과 7개 이상의 측정지점을 확보하면 궤 도틀림에 따른 진동 크기 편차는 상쇄되는 것으로 예측되었다. 진동 값의 편차 크기를 고려할 때 차 륜 결함을 정확히 판별해 내기 위해서는 진동 주파 수분석과 같은 후처리 기법에 관한 추가 연구가 필 요할 것으로 판단된다.시뮬레이션 연구를 통해 궤도틀림에 따른 레일 변형률 과 진동값의 변화를 예측하였다. 본 연구결과를 통해 선 로 변형률, 진동 현장 측정 시 발생하는 측정 편차의 발 생 현상을 이해하고 보다 정확한 현장 측정을 위한 참고 자료로 활용할 수 있을 것으로 판단된다. 다만, 시뮬레이 션 모델에 반영한 환경요소 외에도 기후, 차량 상태, 차 륜․레일의 마모 등 변형률과 진동 값에 영향을 줄 수 있 는 요소가 존재하기 때문에 추가 연구를 통해 시뮬레이 션 결과와 현장 측정 결과의 상사성(Similarity) 입증 및 방향틀림과 고저틀림의 간섭에 의한 가중효과 분석이 필 요하다. 또한, 진동값의 경우 편차가 크게 발생하므로 앞 (선행)․뒤(후행) 차륜의 진동 영향을 제거하거나 정상, 결함 진동 신호를 구분해 낼 수 있는 후처리 기법에 관한 연구가 이어져야 할 것으로 판단된다.
References
Park, S.M., Yeo, I.H, Paik, I.Y. (2015), Analysis of design live load of railway bridge through statistical analysis of WIM data for high-speed Rail, Journal of computational structural engineering instute of Korea, 28(6), pp. 589-597.
Kim, H.M., Kim, S.I., Kim, T.H. (2009), Development & application of RWIM(Railroad Weigh In Motion) system for measuring train load, 2009 Autumn conference of the Korean society for railway, pp. 1878-1885.
Kang, B.B. (2017), Dynamic analysis of the influence of the track irregularity on the running performance of the railway vehicle, Korean society for precision engineering, 34(12), pp. 881-887.
Kim, S.Y. (2010), An identification of track irregularity by analyzing dynamic characteristics of a train, 2010 Spring conference of the Korean society for railway, pp. 2095-2106.
Korea national railway, Track maintenance guidelines (2020), pp. 74.
Lee, B.W., Yeom, H.J., Park, Y.G. (2018), Inspection and maintenance of track irregularity in concrete track, Journal of the Korean society for railway, 21(8), pp. 774-785.
Oh, K.C., Yang, H.S., Choi, I.Y., Lee, S.J., Bae, B.W. (2014), Study on integrated operation system for high speed track inspection, 2014 Spring conference of the Korean society for railway, pp. 1000-1005. Jang, S.H., Lee, S.I. (2006), Numerical simulation of
dynamic behaviour of a gauge-changeable freight wagon, Journal of the Korean society for railway, 9(4), pp. 461-466.
Lee, S.I., Choi, Y.S. (2003), Analysis on the snake motion of one freight car for high speed running, Journal of the Korean society for railway, 6(3), pp. 149-155.
Hur, H.M., Kwon, S.T. (2005), Analysis on the influence of wheel/rail geometric parameters on the equivalent conicity, Journal of the Korean society for railway, 8(5), pp. 490-494.
Park, S.E., Park, M.H., Kwon, M.H. (2006), Nonlinear finite element analysis of reinforced concrete column using timoshenko beam Theory and fiber section model, Korean society of civil enginners, 26(4A), pp. 577-585.
김 주 원 (ORCID : https://orcid.org/0000-0003-0051-5250 / [email protected])
2005~ 현재 한국철도공사 연구원 2009 충남대학교 기계설계공학과 석사
관심분야 : 철도차량, 시뮬레이션, 소음진동, 유지보수
김 용 환 (ORCID : https://orcid.org/0000-0002-4895-3674 / [email protected])
1987 미국 Ohio State University 박사 1987~ 현재 충남대학교 기계공학부 교수 관심분야 : 기계설계, CAE, 소성역학, 재료가공