저작자표시-비영리-변경금지 2.0 대한민국 이용자는 아래의 조건을 따르는 경우에 한하여 자유롭게 l 이 저작물을 복제, 배포, 전송, 전시, 공연 및 방송할 수 있습니다. 다음과 같은 조건을 따라야 합니다: l 귀하는, 이 저작물의 재이용이나 배포의 경우, 이 저작물에 적용된 이용허락조건 을 명확하게 나타내어야 합니다. l 저작권자로부터 별도의 허가를 받으면 이러한 조건들은 적용되지 않습니다. 저작권법에 따른 이용자의 권리는 위의 내용에 의하여 영향을 받지 않습니다. 이것은 이용허락규약(Legal Code)을 이해하기 쉽게 요약한 것입니다. Disclaimer 저작자표시. 귀하는 원저작자를 표시하여야 합니다. 비영리. 귀하는 이 저작물을 영리 목적으로 이용할 수 없습니다. 변경금지. 귀하는 이 저작물을 개작, 변형 또는 가공할 수 없습니다.
공학석사 학위논문
자율무인잠수정의 도킹시스템 및 제어 연구
Study of Docking system and Control for AUV
지도 교수 최 형 식
년 월
2016
2
한국해양대학교 대학원
기 계 공 학 과
배 재 현
본 논문을 배재현의 공학석사 학위논문으로 인준함.
위원장 김 준 영 인
(
)
위 원 최 형 식 인
(
)
위 원 조 용 성 인
(
)
년
월
일
2015
01
15
한국해양대학교 대학원
목 차
iv v vii 서 론 1. 연구배경 1.1 ··· 2 연구목적 1.2 ··· 2 수학적 모델링 2. 2.1 Coordinate system ··· 3 2.2 Vehicle Kinematics ··· 3 2.3 Vehicle Rigid Body Dynamics ··· 4기구부 구성 3. 선체 구조 3.1 ··· 6 자세제어기 3.1.1 ··· 7 추진기 제작 3.1.2 ··· 9 전장 및 시스템 4. 구성 4.1 ··· 11 전원보드 4.2 ··· 13 센서구성 및 성능시험 4.3 ··· 15 센서 성능지표 4.3.1 ··· 15 센서 성능시험 4.3.2 ··· 21
주제어보드 및 자세제어보드 4.4 ··· 30 항법 보드 4.4.1 ··· 30 자세제어 보드 4.4.2 ··· 32 복합 항법 알고리즘 5. 수상 항법 5.1 ··· 42 수중 항법 5.2 ··· 43 경로제어시험 5.3 ··· 44 수심제어시험 5.4 ··· 44 센서기반 복합항법을 이용한 도킹 알고리즘 6. 도킹전략 및 스테이션 구성 6.1 ··· 46 도킹 전략 6.1.1 ··· 46 도킹 스테이션 구성 6.1.2 ··· 47 센서 6.2 PSD ··· 48 센서 구성 6.2.1 ··· 48 센서 성능실험 6.2.2 ··· 51 수중도킹 알고리즘 6.3 ··· 52 광원 방향과 센서의 관계식 6.3.1 ··· 52 도킹제어 알고리즘 6.3.2 ··· 54 광센서를 이용한 도킹시험 및 고찰 7. 결론 및 향후 과제 8. 참고문헌 ··· 64 부록 ··· 65
Table 1 Dimensions of AUV ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
· 6
Table 2 Specification of 6W Maxon motor ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
· 9
Table 3 Specification of RX-28 ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
· 10
Table 4 Specification of Thruster ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
· 10
Table 5 Specification of DC-DC ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
· 14
Table 6 Allowable current of DC-DC ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
· 15
Table 7 Specification of Power board ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
· 15
Table 8 Specification of AsteRx-m ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
· 17
Table 9 Specification of DVL ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
· 18
Table 10 Specification of AHRS ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
· 19
Table 11 PHP specification ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
· 20
Table 12 Result of Receiver Test ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
· 27
Table 13 Specification of Edison ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
· 31
Table 14 Compare of ARM and DSP ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
· 33
Table 15 Attitude control board Specification ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
· 34
Table 16 Specification of Robocube motor driver ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
· 35
Table 17 Specification of TSL250RD ·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
· 50
Fig.1 Coordinate system Fig.2 Hull length of AUV Fig.3 Component of AUV
Fig.4 Attitude controller of AUV Fig.5 Hull inside of AUV(side view) Fig.6 Ruder and Thruster
Fig.7 Components of AUV
Fig.8 Hull inside of AUV (view from above) Fig.9 H/W Diagram of AUV
Fig.10 Diagram of Power board Fig.11 Self hold circuit
Fig.12 Circuit of Power board Fig.13 3D design of Power board Fig.14 Power board
Fig.15 AsteRx-m
Fig.16 Linkqest Micro DVL Fig.17 Xsens AHRS
Fig.18 Depth Sensor
Fig.19 Result of Stand Alone Fig.20 SBAS
Fig.21 Position of Satellite Fig.22 Result of S128 Fig.23 Result of S129
Fig.24 Result of S137
Fig.25 Result of Receiver Test Fig.26 Test bed of DVL
Fig.27 Result of DVL X-axis Test Fig.28 Result of DVL Y-axis Test
Fig.29 Communication of Main control board Fig.30 Intel Edison for arduino board
Fig.31 Main control board
Fig.32 Communication of Attitude board Fig.33 PCB of ARM module
Fig.34 Attitude control board Fig.35 400W Motor Driver Fig.36 25W Motor Driver
Fig.37 Control algorithm diagram of AUV
Fig.38 Control algorithm diagram of navigation mode Fig.39 Gaussian distribution Ⅰ
Fig.40 Gaussian distribution Ⅱ Fig.41 probability density Fig.42 Kalman rule Fig.43 Normal Distribution
Fig.44 Prediction & Measurement Ⅰ Fig.45 Prediction & Measurement Ⅱ Fig.46 Estimation step
Fig.47 Navigation algorismⅠ Fig.48 Navigation algorism Ⅱ Fig.49 Waypoint control Fig.50 Depth control
Fig.51 Docking scenario of AUV Fig.52 Docking System
Fig.53 Coma aberration Fig.54 PSD Sensor
Fig.55 Diagram of PSD Sensor
Fig.56 Detect circuit of coma aberration Fig.57 TSL250 and Mango Board
Fig.58 PSDmodule Test Fig.59 Coma aberration Fig.60 PSD coordinate
Fig.61 Situation of DockingⅠ Fig.62 Situation of DockingⅠ Fig.63 Situation of DockingⅡ Fig.64 Light guidance test Fig.65 Position result
Fig.66 Coma aberration of PSD Fig.67 Rudder & Heading result
Study of Docking system and Control for AUV
Bae, Jae Hyeon
This thesis presents the study of the docking and control of the autonomous underwater vehicle (AUV). For this, a docking system based on light guidance equipment was developed.
For docking operation of the AUV, the AUV is controlled in two steps of the navigation step and the docking step. The navigation step is to control the AUV along a preplanned path. The docking step is to enter the destination station. For docking process, a docking algorithm was developed using the PSD sensor and navigation system. For this, the PSD sensor is used for computing the relative distance and the direction of the station.
A experiment was performed to verify the developed docking system composed of LED lights and a number of PSD sensors.
도킹시스템
Docking system ; autonomous underwater vehicle (AUV) 자율
제 장 서 론
연구 배경
최근 해양 및 심해저의 관심이 높아짐에 따라 해양개발이 활발하게 진행되고 각종 수중 작업의 수요가 늘어남에 따라 수중로봇의 중요성이 대두되고 있다 수중로봇의 수요는 주로 . 심해 생물 생태계조사⦁ , 해저지질학연구, 해저 및 해양 모니터링, 해양자원조사 등의 해양과학조사 대륙이나 육지와 섬 간의 통신을 위한 해저통신케이블공사 해양 구조물 , , 설치 해양 에너지개발 해저 석유 산업 등의 민수부분과 유실물회수 기뢰제거 수상 및 , , , , 수중 ISR등의 군수산업으로 다양한 분야에서 수요가 높아지고 있다.[1]무인잠수정이 바다 밑 심해까지 탐사하기 위해서는 엄청난 바닷물의 압력과 높은 염분 밀도 그리고 빛 한 점 , 들어오지 않는 어둠 등의 자연환경을 극복해야 한다 해저 환경에서는 통신 및 전력에서 . 상당한 제한을 받기 때문에 이를 해결하기 위한 대안으로 중계 임무를 수행하는 스테이션을 두고 임무 수행 데이터를 실시간으로 송수신 하며 운용시간 증가와 및 운용경비 절감을 꾀하고 있다 중계임무를 수행하는 기지와의 무인잠수정은 임무수행장치의 데이터 실시간 . 송수신을 포함하여 수중에서 장시간 작업이 가능해지며 무인잠수정의 진수 인양을 위한 ⦁ 별도의 지원 장치 없이 해저탐사작업이 가능해진다 무인잠수정은 주어진 경로를 추정하여 . 기지에 도달하며, 기지와 무인잠수정의 상대적인 위치 오차를 실시간으로 측정하여 제어입력으로 사용한다 또한 주요 센서인 광학센서. , AHRS센서 소나센서 등을 크기 무게 , , 가격 주파수 특성 계측 오차 등을 고려하여 무인잠수정의 제어시스템에 적용하게 된다 , , , .[2]연구 목적
1.2
본 논문에서는 복합항법을 기반으로 항해하는 무인잠수정의 운용시간증대 위한 방법 중 하나로 무인잠수정의 수중도킹시스템을 개발을 목표로 하며 제시한 목적을 달성하기 위해 수중도킹용 무인잠수정의 제어시스템을 제작하고 수중도킹에 필요한 알고리즘 개발과 그 검증을 목표로 한다 잠수정의 제어시스템은 복합항법을 이용한 항해모드와 스테이션에 . 수중도킹을 시행하는 도킹모드를 개발하여 임무수행 및 수중도킹에 특화하겠으며 정밀한 자세제어를 위한 동역학모델링을 수립하고, 저장된 스테이션의 위치에 도달하기 위한 관성항법기반의 GPS, DVL의 보정으로 복합항법을 개발하고 광센서기반의 도킹 알고리즘을 개발하여 주행 및 도킹실험을 통해 임무수행능력 및 도킹성능 검증을 목표로 한다.제 장 수학적 모델링
2.1 Coordinate system
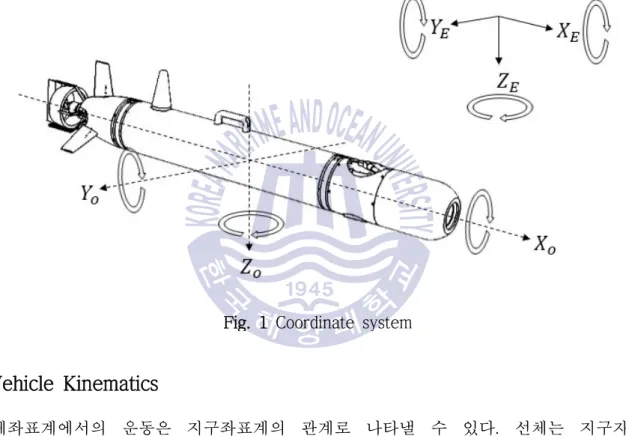
수중에서 자유도를 가지는 강체의 자세와 운동을 해석하기 위해서는 6 Fig. 1과 같이
선체좌표계와 지구좌표계를 정의하여야한다 일반적으로 선체좌표계의 원점은 무게중심 및 .
부력중심에 일치시킨다.
Fig. 1 Coordinate system
2.2 Vehicle Kinematics
선체좌표계에서의 운동은 지구좌표계의 관계로 나타낼 수 있다. 선체는 지구자체의 공전과 자전에 의한 영향은 없는 것으로 가정하고 선체의 속도에 영향을 미치지 않는다고 가정한다 일반적인 자유도를 갖는 수중운동체의 운동은 아래와 같은 벡터로 나타낼 수 . 6 있다.
(1)
는 지구고정좌표계 기준으로 선체의 위치와 자세이고,
는 선체고정좌표계 기준으로 선체의 병진과 회전속도이며,
는 선체고정좌표계 기준으로의 선체의 전체 힘과 모멘트이다. 식(2)는 병진운동의 속도를 선체고정좌표와 관성좌표계의 관계로 나타내는 기구적 관계식이다.
(2) 이때 선체고정좌표를 관성좌표계로 변환하는 좌표변환행렬은 식(3)과 같다.
coscos sincos cossinsin sinsin coscossin sincos coscos sinsinsin cossin sinsincos
sin cossin coscos (3)
다음으로는 회전운동인 각속도를 선체고정좌표와 관성좌표계의 관계를 식(4)로 나타내고,
각 축에 대한 roll, pitch, yaw의 기본 회전행렬은 식(5)와 같다.
(4)
sin tan cos tan cos sin cos sin cos cos (5)
는 Guidance and Control of Ocean Vehicles(Thor .Fossen)Ⅰ 의 2장부분을 참고 하였다 각속도의 경우 특정 각
Kinematics . pitch (
±
)에서 운동체를표현할 수 없는 구간이 생기지만 이는 선체의 운동에 있어서 극히 제한적인 부분이며,
수중운동체가 pitch각 제어에서 수직으로 움직이지 않으므로 선체의 수학적 모델링을 함에
있어서 무방하다고 판단되어진다.[5]
2.3 Vehicle Rigid-Body Dynamics
선체의 질량중심과 부력중심은 선체고정좌표계에 대하여 아래의 위치 벡터로 나타낼 수 있다.
선체고정좌표계의 원점은 부력중심에 위치하고 6자유도를 가지는 강체는 지배방정(Governing equation)인 뉴턴 제 법칙에 따라 아래의 방정식으로 나타낼 수 있다2 .
(7)
은 선체의 병진운동에 대한 외력을 나타내고
은 회전운동을 할 때 발생하는 외력을 나타낸다 선체의 중심을 기준으로 각 방향에 대해 대칭인 형상을 하고 . 있으므로 원점에서의 관성모멘트는 다음과 같이 나타낼 수 있다.
(8) 원점에서의 관성모멘트를 이용하여 운동방정식을 간단히 하면 식(9)과 같다
(9) 이때 외력과 모멘트는 유체정역학적 힘, 항력, 제어력을 포함하며 각 힘들은 선체의 계수에 의해 나타낼 수 있다.[3][4]
(10)제 장 기구부 구성
선체 구조
3.1
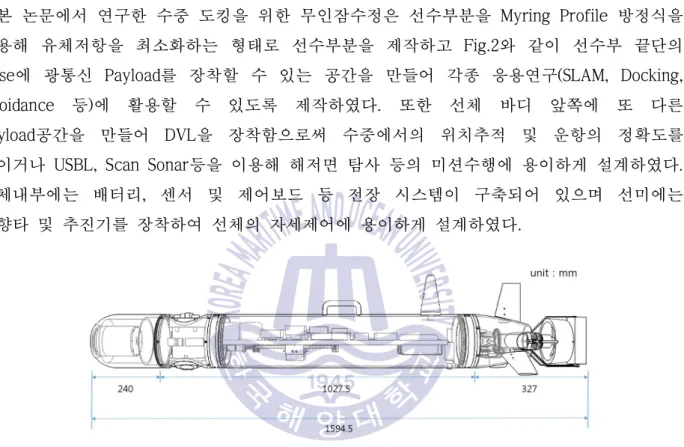
본 논문에서 연구한 수중 도킹을 위한 무인잠수정은 선수부분을 Myring Profile 방정식을 이용해 유체저항을 최소화하는 형태로 선수부분을 제작하고 Fig.2와 같이 선수부 끝단의 에 광통신 를 장착할 수 있는 공간을 만들어 각종 응용연구Nose Payload (SLAM, Docking,
등 에 활용할 수 있도록 제작하였다 또한 선체 바디 앞쪽에 또 다른
Avoidance ) .
공간을 만들어 을 장착함으로써 수중에서의 위치추적 및 운항의 정확도를
Payload DVL
높이거나 USBL, Scan Sonar등을 이용해 해저면 탐사 등의 미션수행에 용이하게 설계하였다.
선체내부에는 배터리, 센서 및 제어보드 등 전장 시스템이 구축되어 있으며 선미에는
방향타 및 추진기를 장착하여 선체의 자세제어에 용이하게 설계하였다.
Fig. 2 Hull length of AUV
선수부의 길이는 240mm, 중앙부의 길이는 1027.5mm, 선미부의 길이는 327mm로 총 길이는 1594.5mm이다 무인잠수정의 총 중량은 약 . 22.5kgf이며 부력은 약 , 22.5kgf이다. 선체는 중성부력을 가지도록 설계 하였다. Index Value Length 1594.5 mm Diameter 180 mm Width 21.5 mm Weight 22.5 kgf
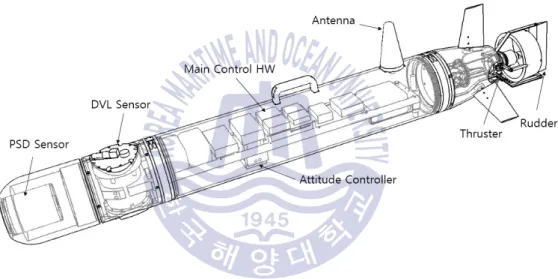
과 같이 선수부에는 센서가 장착되고 선체 중앙부에는
Fig.3 PSD(position sensitive detector)
자세제어기 배터리 및 센서 제어보드 및 제어시스템 등으로
DVL(Doppler velocity log), , ,
구성되어있다. 또한 선체는 원통형의 방수 구조로 20기압을 견딜 수 있게 설계하였다. 선미부는 방향타 추진기가 장착되어있다, . 센서는 스테이션과 광학식 도킹을 위함이고 센서는 수중에서의 선체 위치추정에 PSD , DVL 기준이 되며 관성항법의 보정 역할을 한다 내부 전장은 배터리와 전원모듈 주제어보드와 . , 센서가 선체의 항법시스템을 담당하고 자세제어보드와 자세제어모듈 AHRS, Depth, GPS , 추진기 드라이버, 방향타 모듈이 선체자세제어를 담당하고 있다. 또한 선체외부에는 의 및 안테나가 장착되어있으며 선미에 방향타와 이를 제어하는 2.4Ghz Wi-Fi GPS/L1 , 서보모터가 장착되고 자체 개발한 추진기를 사용하여 추력을 제어한다.
Fig. 3 Component of AUV
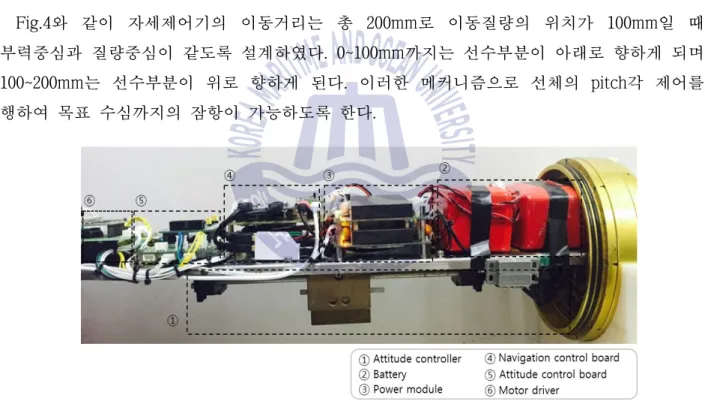
자세제어기 3.1.1 본 논문의 대상 무인잠수정은 선체의 Pitch각 제어를 위해 기존에 적용하던 fin 제어방식과는 달리 선체의 질량중심을 이동시켜 Pitch각 제어를 행한다 이는 . fin에 의해 선수부분이 나중에 내려가는 것보다 질량중심을 이동시켜 선수부분이 먼저 내려가게 하고 선체의 무게와 추진기의 추력이 더해져 원하는 심도에 더 빨리 수렴한다.
Fig. 4 Attitude controller of AUV 와 같이 자세제어기의 이동거리는 총 로 이동질량의 위치가 일 때 Fig.4 200mm 100mm 부력중심과 질량중심이 같도록 설계하였다. 0~100mm까지는 선수부분이 아래로 향하게 되며 는 선수부분이 위로 향하게 된다 이러한 메커니즘으로 선체의 각 제어를 100~200mm . pitch 행하여 목표 수심까지의 잠항이 가능하도록 한다.
Fig. 5 Hull inside of AUV(side view)
은 선체내부프레임에 장착된 하드웨어를 보여준다 자세제어기 는 전장프레임의
Fig.5 . ( )①
밑단에 LM가이드를 장착하고 6w급 모터로 2.5kg의 질량을 움직여 질량중심을 이동시킨다.
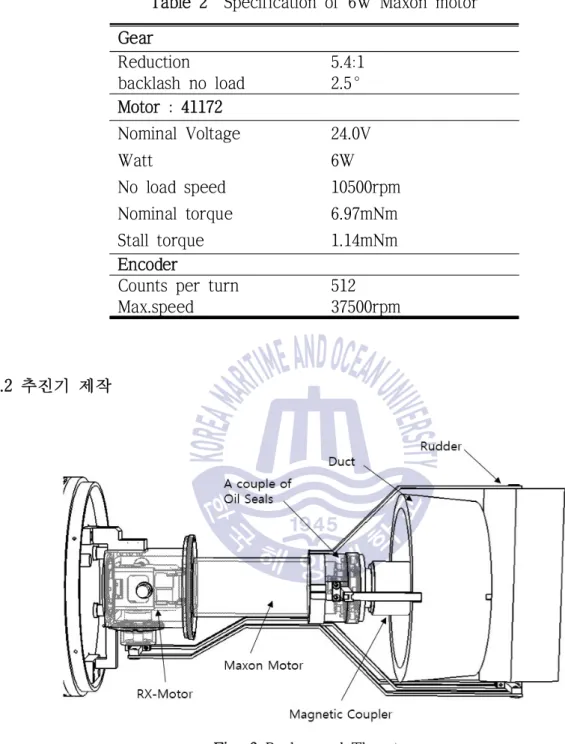
는 자세제어기의 모터성능지표이다
Gear Reduction 5.4:1 backlash no load 2.5° Motor : 41172 Nominal Voltage 24.0V Watt 6W No load speed 10500rpm Nominal torque 6.97mNm Stall torque 1.14mNm Encoder
Counts per turn 512
Max.speed 37500rpm
Table 2 Specification of 6W Maxon motor
추진기 제작 3.1.2
Fig. 6 Ruder and Thruster
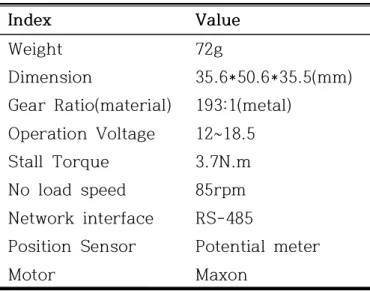
은 방향타 모듈과 마그네틱커플러를 이용한 추진기이다 방향타 모듈은 선미의 Fig.6 . 방향타와 링크로 연결되어 서보모터의 회전을 병진운동으로 전환 시켜 방향타를 좌우 최대 도씩 움직일 수 있게 설계되었으며 전방 추진 시 프로펠러에서 나오는 유체의 흐름을 30 바꿈으로써 방향 제어를 가능하게 하였다.
Index Value
Weight 72g
Dimension 35.6*50.6*35.5(mm)
Gear Ratio(material) 193:1(metal)
Operation Voltage 12~18.5
Stall Torque 3.7N.m
No load speed 85rpm
Network interface RS-485
Position Sensor Potential meter
Motor Maxon
Table 3 Specification of RX-28
추진기는 Maxon motor사의 EC-4pole 시리즈인 200W급 모터를 사용한다 모터의 방수를 .
위해 중 링 구조의 방수실린더를 제작하였고 실린더 내부에 모터와 모터 축에 마그네틱 2 O 커플링을 부착하였다 내부에서 커플링이 회전하면 외부에 자석으로 된 프로펠러축이 같이 . 회전한다. 마그네틱 커플러, 2중 Oil seal 구조, BLDC모터라는 가지 요소가 추진기의 3 반영구적사용을 가능하게 한다. 추진기의 최대회전속도는 2833rpm이며 토크는 이다 19.08Nm . Gear : 110309 Reduction 6:1 backlash no load 2.5° Motor : 311535 Nominal Voltage 24.0V Watt 200W No load speed 17000rpm Nominal torque 114mNm Stall torque 3180mNm Encoder : 110518
Counts per turn 500
Max.speed 24000rpm
제 장 전장 및 제어 시스템
구성
4.1
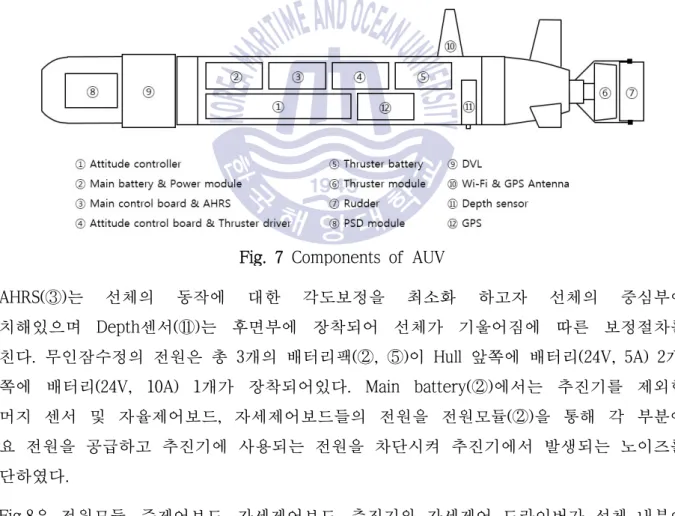
무인잠수정의 선체 중앙부 내부의 전장 및 시스템 구성을 Fig.7에 나타내었다 이들은 . 자세제어기( ), ① 추진기( ), ⑥ 방향타( ), ⑦ 배터리( , ② ⑤), 컨트롤보드 등으로 구성되어있으며, 각 부품들은 hull 내부에 장착된다 외부의 . payload 공간에는 PSD모듈( )⑧과 DVL센서( )⑨가 장착되어있고 방수커넥터를 이용해 내부 시스템과 연결되어있다. 또한 사용자와의 통신을 위한 안테나( )⑩가 선체 후면에 장착되어있으며 안테나하우징 안에 개의 안테나가 내장되어있어 사용자와 통신이 가능한 2 Wi-fi신호 선체 위치의 기준이 , 되는 GPS신호를 받아 처리한다.Fig. 7 Components of AUV
는 선체의 동작에 대한 각도보정을 최소화 하고자 선체의 중심부에
AHRS( )③
위치해있으며 Depth센서( )⑪는 후면부에 장착되어 선체가 기울어짐에 따른 보정절차를
거친다 무인잠수정의 전원은 총 개의 배터리팩. 3 ( , )② ⑤이 Hull 앞쪽에 배터리(24V, 5A) 2 , 개
뒤쪽에 배터리(24V, 10A) 1개가 장착되어있다. Main battery( )②에서는 추진기를 제외한
나머지 센서 및 자율제어보드 자세제어보드들의 전원을 전원모듈, ( )②을 통해 각 부분에 필요 전원을 공급하고 추진기에 사용되는 전원을 차단시켜 추진기에서 발생되는 노이즈를 차단하였다. 은 전원모듈 주제어보드 자세제어보드 추진기와 자세제어 드라이버가 선체 내부에 Fig.8 , , , 장착된 사진이다. AHRS는 주제어보드 아래인 선체 중앙에 위치한다.
Fig. 8 Hull inside of AUV (view from above) 은 선체 내외부에 장착된 주제어보드 자세제어보드 전원보드의 통신 및 전원을 Fig.9 , , 나타냈다. 주제어보드는 센서의 정보를 취합하여 선체의 자세와 위치를 추정하며 목표하고자 하는 좌표로 이동하기 위해 자세제어보드에 명령을 하달한다 자세제어보드는 . 각각 방향타, 추진기, 자세제어기 드라이버에 명령을 하달하고 액츄에이터들의 상황과 자세제어보드의 진행사항을 주제어보드에 전송한다.
전원보드
4.2
전원보드의 필요조건은 완전한 수밀상태에서의 ON/OFF스위칭과 내부공간 확보를 위한 소형화가 이루어져야한다 한정된 공간에서의 모듈의 소형화는 더 많은 배터리를 장착할 수 . 있게 한다 또한 스위치의 방수성능이 낮으면 해수유입의 확률이 높아지기 때문에 대부분의 . 방수스위치가 값이 비싸고 복잡한 구조를 가지게 된다. 이에 따라 마그네틱 스위치를 이용한 근거리 원격 스위칭 시스템을 개발하여 전원 모듈에 삽입하였다. 은 전원보드의 개념도이다 스위치가 켜지면 를 통해 배터리의 전원이 Fig.10 . DC-DC 필요전압으로 변환하여 제어 시스템에 공급한다 회로 및 . PCB는 Altium14 소프트웨어를 사용해 설계하였다.Fig. 10 Diagram of Power board
는 마그네틱 스위치를 이용해 설계한 스위칭 회로이다 릴레이를 사용해 Fig.11 . 자기유지회로를 설계하였다 총 개의 배터리 커넥터. 4 (J23~J26)가 마그네틱OFF(N.O)스위치를 통해 릴레이를 동작시키고 동작된 릴레이는 번 2 pin의 GND와 번 4 pin의 CNT와 연결된다. 단은 릴레이의 번핀과 연결된 번 에 연결된 번 에 를 연결시켜 릴레이를 GND 4 2 pin 1 pin GND 계속 동작시키게 된다.
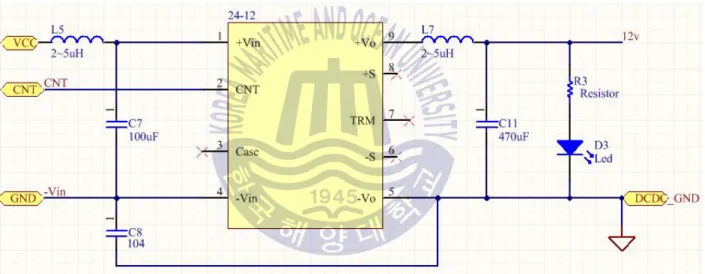
Fig. 11 Self hold circuit 내부공간 절약을 위해 DC-DC를 개씩 적층 하는 구조로 설계하였다 아래층과 위층의 2 . 핀과 핀을 공유시켜 동시에 가능하게 설계하였으며 표는 CNT GND ON/OFF , Table5 전원모듈에 사용된 DC-DC의 사양이다. 필요 전압 및 전류를 충분하게 공급하기 위해 파워캅 PMS100 시리즈를 사용하였다.
Model Name Input Range Output Voltage Output Current Output Power Efficiency PMS100-24-05 18~36 5V 20.0A 100W 82% PMS100-24-12 12V 8.3A 100W 84% PMS100-24-24 24V 4.0A 100W 86% Table 5 Specification of DC-DC 는 입력전압을 필요전압으로 강압하는 역할을 하며 전압을 강압하는 과정에서 DC-DC 빠르게 스위칭하기 때문에 입출력 단에 필터를 설계하여 적용하는 것을 권장한다 따라서 . 제조사에서 추천하는 필터를 구성해 회로를 구현하였다 수동소자인 코일과 DC-DC LC . 커패시터를 이용해 필터를 구성하였고 DC-DC의 –Vin과 –Vo을 커패시터로 묶어줌으로써 입출력단의 GND를 분리시켰다 본 회로를 구성하기 위한 수동소자의 용량 계산은 식 를 . 19 이용해 구하였고 Table.6에 나타내었다. (11)
Model Name Input Watt Output Efficiency Input current I_out P_out PMS100-24-05 121 20.0A 100W 82% 5A PMS100-24-12 119.1 8.3A 100W 84% 4.94A PMS100-24-24 116.2 4.0A 100W 86% 4.84A
Table 6 Allowable current of DC-DC
은 위에서 설명한 와 필터설계 수동소자의 허용전류를 고려하여 회로를 Fig12 DC-DC , 구성하고 필요전압의 사용 빈도에 따라 커넥터 수를 달리하였다 사용 빈도가 높은 . 5V의 경우 총 12 , 개 적게 사용하는 24V의 경우 개를 설치하고 요구사양보다 여유 있게 구성해 4 선체의 전장이 추가되거나 수정되었을 때를 대비하였다. 전원모듈의 사양은 Table7에 정리하였고 전원모듈의 전체회로는 부록 에 나타내었다1 .
Fig. 12 Circuit of Power board
Vin Vout Aout Port 사용용도
24V
5V_1ch 20A 5 PSD, LED 통신모듈
5V_2ch 20A 7 MCU, Photo sensor, Edison PC, IMU
12V 8.3A 5 Depth sensor
24V 4A 4 DVL, Weight balance module
사전에 설계된 회로의 검증을 시뮬레이션 및 만능기판에 구현하여 실험을 통해 문제점을 보완 후 다음단계인 PCB를 제작하였다 전원모듈의 부품구성과 배치는 . Fig.13을 통해 볼 수 있다 자기유지회로를 위한 스위치커넥터와 릴레이는 오른쪽 기판의 왼쪽 면. (DC-DC입력 에 ) 배치하여 패턴의 방향을 복잡하게 하지 않고 단순화하였다 또한 기판의 아래층과 위층을 . 연결시켜주는 헤더 핀을 통해 배터리전원과 스위치 신호를 공유시켜 전원모듈을 켜고 끔에 있어서 간편함을 꾀하였다.
Fig. 13 3D design of Power board
는 설계한 를 제작하여 모듈을 테스트하고 선체내부에 장착하여 각 부분으로
Fig.14 PCB
전원을 공급하였다.
센서구성 및 성능실험
4.3
센서 성능지표 4.3.1
(1) GPS(Global Positioning System)
수신기가 각 위성의 미약한 신호를 받아 신호를 증폭하여 중앙 처리장치가 신호를 GPS 분석, 현재 위치를 최대한 빠르고 정확하게 계산을 하는 GPS수신 장치가 현재 많이 보급되어 있으며 현재는 군사용뿐 만 아니라 민간용으로도 많이 활용되고 있다 안테나의 , . 경우 별도의 주문 제작으로 Teflon coating을 이용하여 3000ft까지 방수가 가능하다. 과 은 선체 내부에 장착된 사의 의 성능 지표이다
Fig.15 Table8 Septentrio AsteRx-m .
Fig. 15 AsteRx-m Power Input voltage 3.3VDC±5% GPS L1 320mW Antenna Connectors U.FL Antenna supply voltage 3~6VDC Position accuracy
Standalone (Horizon, Vertical) 1.3m, 1.9m SBAS (Horizon, Vertical) 0.6m, 0.8m DGPS (Horizon, Vertical) 0.5m, 0.9m Velocity Accuracy Horizontal 0.8 cm/sec Vertical 1.3 cm/sec Dynamics Acceleration12 10 g
도플러 속도계 (2) (DVL) 해저 바닥면에서 반사되어 음파의 도플러 현상을 이용하여 수중에서 무인잠수정의 차원 3 속도를 계측하는 시스템이다. 도플러 센서의 세부 사양은 아래 도표에 나타낸다 도플러 센서는 바닥면의 반사파를 . 계측하므로 트랜스튜서는 아래를 향하고 있어야 하며 무인 작수정이 바닥면에 앉아 있는 경우에도 계측이 가능하도록 최소 측정 거리인 50cm이상의 높이에 설치되어야 한다. 트랜스튜서의 방향은 beam1 과 beam3 사이의 위치가 전방을 향해야 한다.
Fig. 16 Linkqest Micro DVL
Power
Input voltage 24VDC±2V Average power consumption 2-5 watts Hardware
transducer 4 Beam Convex Beam Angle 22°
Velocity
Maximum Altitude 110m Minimum Altitude 0.3m Maximum Velocity ±20knots Standard Depth 800m Maximum Ping rate 5/sec
(3) AHRS(Xsens MTi)
는 센서 기반의 소형 경량 관성 측정 장치로써 축 각속도 축 가속도와 축
AHRS MEMS / 3 , 3 3
지자기 센서를 기반으로 자동차 항공기와 같은 이동하는 물체의 위치 자세 속도 등의 , , ,
정보를 제공하는데 사용될 뿐만 아니라 로봇, 기계장치 및 사람의 동작을 측정하는데
사용한다 무인항공기. (UAV), 무인차량(UGV), 무인잠수정(UUV), 수중어뢰 유도무기체계 등에 ,
적용할 수 있으며 자세추정 자율제어 및 유도 항법응용분야에 사용된다, , .
Fig. 17 Xsens AHRS
Index Value Voltage 4.5~30V Protocol Type RS232 Update Rate max 256Hz Dynamic Range all angles in 3D Angular Resolution 0.05°
Repeatability 0.2° Static Accuracy (roll/pitch) 0.5° Static Accuracy (heading) 1.0° Dynamic Accuracy 2°RMS
(4) Depth sensor 응력을 받으면 저항값이 변화하는 반도체 피에조 저항효과를 이용하여, 압력이 다이어프레임을 변형시키면 감압소자위에 붙어 있는 가스 확산방식의 피에조 저항의 값이 변화한다 이 원리를 이용하여 휘스톤브리지 회로로 구성된 개의 피에조저항은 정전류로 . 4 구동하며 압력을 받으면 출력에 압력에 비례한 정압신호를 얻을 수 있고 온도보상회로를 , , 함께 내장하여 정도를 일정 하게 유지시킨다.
Fig. 18 Depth Sensor
Electrical Excitation 11~32VDC Analog Output 0~5VDC Digital Output RS232(19200, 8, n, 1) Range 0 ~ 100kPa ...150MPa(Gauge) Performance Accuracy ±0.035%FS(RSS) Thermal Effect on Zero ±0.025%FS Thermal Effect on Span ±0.025%FS Long-term Stability ±0.05%FS/year Compensated Temperature Range -10 ~ 50℃ Operating Temperature Range -20 ~ 80℃
센서 성능시험 4.3.2
성능 시험 (1) GPS
성능 시험은 와 모듈을 택해
GPS GPS SBAS(Satellite Based Augmentation System)
수신기의 성능을 시험하였다 두 실험은 사의 에서 제공하는
GPS . Septentrio AsteRx-m Stand
기능과 기능을 사용했을 때의 성능시험이다 기능은 오직
Alone SBAS . Stand Alone
위성 미국 에서 주는 위치정보를 이용하여 수신기의 좌표를 측정하는 기술이며
GPS ( )
기능은 각 나라 일본 인도 유럽 미국 에서 쏘아올린 정지궤도위성
SBAS ( , , , ) (GNSS, Global
과 위성을 복합적으로 이용하여 보다 정확한 좌표를 얻을 수
Navigation Satellite System) GPS
있는 기술이다 실험은 . Septentrio사에서 제공하는 소프트웨어를 이용해 데이터를 로깅하고 분석하고 그 결과를 설명하였다 특정 위치에 . GPS를 고정하고 GPS 첫 데이터가 나오는 시간부터 시간가량의 데이터를 분석하였다 본 실험은 1 . SBAS와 GPS의 차이를 알기 위한 실험으로 상대적인 차이를 나타내기 위해 표준편차를 이용해 에러율을 분석하였다. 위성만을 이용한 시험 GPS
먼저 수신기의 Stand Alone 기능을 이용한 시험으로 SBAS수신 기능을 해제하여 GPS위성
만으로 좌표를 예측하였다.
은 기능을 사용하여 수신기에서 위성만을 사용해 현재위치에 대한
Fig.19 Stand alone GPS
오차를 미터 단위로 표현한 것이다 그래프는 위에서부터 . East, North, Up으로 수신기에서 측정된 경도 위도 해수면의 높이차를 시간에 따라 미터 단위로 나타내고 각각의 오차는 , , 평균값으로 계산하여 출력된다 수신기로부터 . East는 0.2178m, North는 0.9165m, 해수면과의 차이는 –3.1571로 나타난다. 위성만을 이용한 시험 SBAS
먼저 SBAS(Satellite Based Augmentation System)에 대해 설명하면 넓은 지역에 분산
설치된 기준국에서 수집한 GPS 데이터의 보정 정보와 항법 신호의 이상 유무를 정지궤도
위성을 통해 이용자들에게 전달함으로써 해당지역에 대한 정밀한 위치 정보를 획득할 수
있는 초정밀 GPS 오차보정시스템으로 동작원리는 아래와 같다.
Fig. 20 SBAS(http://kass.re.kr/sub01/sub01_01.php)
넓은 지역에 분산된 기준국에서 각각 GPS신호를 수신하여 항법데이터 및 거리측정치를 생성하고 중앙처리국에 전달한다.( ) ① 중앙처리국은 기준국에서 수집된 정보들을 활용하여 사용자들이 위치계산에 이용할 GPS위성에 대한 궤도 및 시계오차와 전리층 지연 오차 보정을 위한 보정정보를 생성하고 GPS신호의 이상여부를 판단하기 위한 무결성 정보를 생성하며( ), ➁ 중앙처리국에서 생성된 보정정보 및 무결성정보는 국제 표준 SBAS 메시지에 포함되어 위성통신국으로 전달한다.( ) ➂ 위성통신국은 SBAS메세지를 GPS와 유사한 특성을 지닌 SBAS신호에 실어 정지궤도위성으로 송신하고( ), ➃ 정지궤도위성은 수신된 SBAS신호를 서비스 영역내의 사용자들에게 방송한다.( ) ➄
해외 SBAS 운영 현황은 미국의 WAAS(3 ), 기 유럽 EGNOS(3 ), 기 일본 MSAS(2 ), 기 인도
기 로 우리나라에서 인접한 일본과 인도의 기와 기의 데이터를
GAGAN(2 ) MSAS 2 GAGAN 1
받아 비교실험을 진행하였다. GPS수신기는 GPS신호와 정지궤도위성에서 수신된 SBAS 보정 및 무결성 정보들을 이용하여 신뢰할 수 있는 정확한 위치를 계산한다 이와 같은 방법으로 . 수상 항법에 사용될 무인잠수정의 GPS센서의 오차는 SBAS기능을 통해 보정하고, 위성만을 이용할 때 생기는 위치오차와 비교하고자 신호를 측정하였다 은 GPS SBAS . Fig.21 실험에 사용된 SBAS위성 정지궤도위성 을 나타내고 있으며 수신기의 위치를 기준으로 ( ) 동서남북에서 위성이 떠있는 방향을 대략적으로 나타내고 있다.
Fig. 21 Position of Satellite
수신기를 기준으로 남동쪽으로 일본위성인 MTSAT-1, MTSAT-2가 남서쪽에는 인도위성인
가 대 총 대의 위성이 관측된다 하지만 신호를 받을 수 있는 위성은
INSATNAV 2 4 SBAS .
기와 기로 제일 서쪽에 위치한 위성은 수신기가 위성을 찾았으나
MSAS 2 GAGAN1 INSATNAV
여러 장애로 데이터를 수신 받지 못하였다. 3대의 위성에서 전송해주는 위치 정보는
우리나라 기준이 아닌 각 나라 기준의 위치정보를 가지고 수신기 위치를 예측하는 것으로
INSATNAV S128 먼저 인도의 GAGAN위성에서 SBAS신호를 받아 수신기의 위치정보를 계산한 결과이다. Fig. 22 Result of S128 인도의 SBAS를 이용한 실험은 인도 하늘의 정지궤도위성에서 주는 SBAS신호를 이용해 수신기의 위치를 보정하고 그 결과를 그래프로 표시하였다. 상대적으로 거리가 먼 의 데이터는 일반적인 값과 비슷한 결과가 나오리라 예상하였지만 동쪽으로 GAGAN GPS 북쪽으로 높이 으로 경위도의 차이는 크지 않으나 해수면과의 높이에 0.8m, –0.12m, –0.33m 있어서 큰 차이를 보였다. 또한 이 결과를 표준편차로 보았을 때 GPS 표준편차는 약 이고 의 표준편차는 으로 일반 를 이용하는 것보다 정확도가 높았다 이는 1.2 GAGAN 0.6 GPS . 상대적으로 거리가 먼 GAGAN의 데이터는 경위도에서는 차이가 크지 않으나 위치를 보정하는 단계에서 GAGAN의 데이터가 축 높이 정보에 대한 신뢰가 높다고 판단되어진다z , .
MSAS-1 S129
은 일본 위성인 가 보내는 위치정보를 분석한 결과이다 위성의
Fig.23 SBAS MTSAT-1 .
표기는 S000으로 고유 식별번호를 붙여 구분한다. S129는 다른 SBAS위성보다 정확한 결과를 볼 수 있었다. Fig. 23 Result of S129 세 개의 위성 중 가장 좋은 결과를 보여주고 있다 그래프를 보았을 때 데이터의 떨림은 . 다른 위성과 비슷하게 보이나 축의 데이터가 모두 큰 오차를 보이지 않는다3 . 이는 우리나라가 아직은 SBAS시스템이 없어 다른 나라의 위성을 사용함으로써 생기는 현상으로 를 도입하면 보다 정확한 위치정보를 얻을 수 있을 것이라 본다 는 동 SBAS . S129 –0.286m, 북 0.317m, 높이 –0.335m의 오차를 가지고 표준편차는 0.3627이다.
MSAS-2 S137 Fig. 24 Result of S137 의 데이터는 의 데이터에 비해 시간에 따라 오차가 커지는 경향이 MTSAT-2 MTSAT-1 있다 하지만 축 데이터는 . x -0.065로 오히려 S128, 129에 비해 굉장히 작은 오차가 나왔다. 하지만 축 데이터는 y 0.72m으로 다른 위성 데이터와 많은 차이를 보인다. z축 데이터는 로 정확도가 높게 나왔으며 이 결과들을 표준편차로 나타내었을 때 와 0.0395 MTSAT-1 차이가 났다 결론적인 수치로 보았을 때 와 는 차이가 크지 않음을 0.0637 . MTSAT-1 MTSAT-2 볼 수 있다 이는 . GPS 데이터를 비교할 때 시간에 따른 변수가 많음으로 시간에 따른 경향을 보여주는 것 보다 정해진 시간 내에서 표준편차와 같은 일정한 기준을 두고 정확도를 계산하여야 함을 보여준다.
Total Test result
은 의 시험 결과를 나타내었다 는 칸의 간격이 로
Fig.25 GPS, S128, 129, 137 . GPS 1m
표시되고 SBAS위성의 데이터는 한 칸의 간격을 2m로 나타내었다. SBAS와 GPS데이터를
비교하였을 때 데이터 위경도 차이는 미미하였으나 축의 차이는 z 3m가량 차이가 남으로써
Fig. 25 Result of Receiver Test 데이터는 중앙으로 밀집되어 있으나 밖으로 군데군데 점이 퍼져있는 현상이 있다 GPS . 그에 비해 SBAS데이터는 데이터가 고르게 분포하여 일정한 구간을 그릴 수 있다 이는 . 데이터 평균값은 그리 차이나지 않지만 실 데이터가 일정구역에서 밀집도를 가지고 있어 위치정보의 오차정도를 쉽게 알 수 있고 정의하여 항법 알고리즘에 바로 사용할 수 있음을 보여준다 또한 . GPS데이터의 경우 필터링한 데이터를 사용해야 함을 보여준다. x(m) y(m) z(m) 표준편차 GPS 0.2178 0.9165 -3.1571 2.1784 S128 0.8071 -0.1246 -0.3352 0.6079 S129 -0.2859 0.3165 -0.3352 0.3627 S137 -0.0650 0.7202 0.0395 0.4264
Table 12 Result of Receiver Test
는 및 성능실험결과를 표준편차를 이용하여 나타내었다 를 제외한 Table12 GPS SBAS . S129 나머지 데이터는 x, y, z축 중 한 축이 오차가 심하게 나는 것을 제외하면 다른 데이터들과 비슷한 결과를 나타내고 있다. 각각의 성능을 비교했을 때 S129, 137, 128, GPS순으로 정확도가 높게 나왔다 이는 우리나라와 가까운 . MSAS를 이용하여 위치정보를 갱신하고 항법 알고리즘에 사용하였을 때 관측값의 신뢰도가 다른 SBAS나 GPS를 이용하는 것보다
성능 시험 (2) DVL 가로 4m, 세로 3m인 실내 수조에 Fig.26과 같이 DVL 시험 장치를 설치하였다. 설치는 알루미늄 프로파일을 이용하여 수직축 빔에 장착되며 알루미늄 빔은 센서의 DVL 높이 조절이 가능하게 설계되었다 실험장비는 기준속도와 위치를 알 수 있도록 모터 및 . 엔코더를 이용한 트랙시스템으로 구성하였다.
Fig. 26 Test bed of DVL
구성된 DVL 실험 장치를 이용하여 DVL의 기본적인 성능 시험를 실시하였다 수조의 . 가로 길이 방향의 거리는 5m인데 실제로 장비를 설치하고 테스트를 할 수 있는 거리는 최소 요구 거리 상 0.5m의 오프셋을 주고 속도는 0.3m/s를 유지하여 4m 왕복운동 테스트를 실시하였다. Fig.27는 DVL의 정면 방향인 축의 속도를 측정한 결과이다x . 위의 Yaw 그래프에서 값이 반전되는 시점에서 DVL의 속도가 반전되는 것을 볼 수 있다 이는 . DVL의 왕복운동을 회 실시한 것으로 파악할 수 있으며 실제로 2 0.3m/s의 속도로 회 왕복을 2 실시하였다 데이터에 약간의 떨림이 있지만 이는 수조 구조상 . DVL센서의 최대 깊이인 보다 훨씬 얕기 때문에 생기는 오프셋으로 차후 센서를 사용할 때 필터를 통해 600m 데이터를 균일하게 만들어야 할 필요가 있다고 본다.
는 의 축 방향으로 왕복 회 움직이고 속도를 측정한 것으로 축 속도에 따라
Fig.28 DVL y 2 y
그래프의 값 이 변화 되는 것을 볼 수 있다 또한 기준 속도인 에서 약간의
Yaw Yaw . 0.3m/s
떨림이 있으므로 간단한 필터링이 요구된다.
Fig. 28 Result of DVL Y-axis Test
두 실험 모두 측정된 속도 값에 노이즈가 포함된 이유는 실험수조의 수심이 얕고 또한 실험기구가 작동하거나 멈출 때 벨트의 백래쉬와 DVL을 고정하는 기둥의 떨림으로 인해 측정된 값이 일정하지 않고 떨리는 것으로 보인다 속도 그래프를 보면 축과 축 모두 회 . x y 2 왕복으로 측정된 실제 속도는 평균 0.3m/s로 입력속도인 0.3m/s와 같은 것을 알 수 있고 본 성능 시험을 결과를 바탕으로 에서 출력되는 속도 값을 신뢰할 수 있다 DVL DVL .
주제어보드 및 자세제어보드
4.4
주제어보드 4.4.1
주제어보드는 Fig.29와 같이 SBC(Single Board Computer)를 메인으로 주요센서인 GPS,
센서의 정보를 취득한다 취득된 센서의 정보를 사용하여 선체의
AHRS, DVL, Depth, PSD .
자세 및 위치를 추정하고 선체의 주행을 위한 자율제어 알고리즘을 연산한다. 연산된
결과의 목표값을 자세제어보드 MCU인 Arm M4에 송신한다.
Fig. 29 Communication of Main control board
센서들은 통신 방식은 RS-232이며 메인 PC의 시리얼 통신 채널 부족으로 USB통신을
이용해 데이터를 파싱하고자 하였다. Edison에서는 USB-OTG(On the go)통신이 개 이므로 1
허브를 통해 와 연결하고 는 개의 라인을 개의
USB FTDI(USB to UART) FTDI 1 USB 4 UART
통신으로 확장하여준다 확장된 . UART통신을 Max3232 chip을 이용해 센서와 통신규격을
맞춰줌으로써 센서와의 통신을 가능하게 하였다.
(1) SBC (Intel Edison)
리눅스 기반의 SBC(Single Board Computer)인 Intel Edison을 사용하여 USB OTG(on the
통신으로 로써 각종 센서 데이터를 받을 수 있다 시리얼 통신을 사용하는
go) USB Host .
Fig. 30 Intel Edison for arduino board
FIRMWARE+SOFTWARE
CPU OS Yocto Linux v1.6
Development environments Eclipse, Arduino, intel XDK MCU OS RTOS
EXTERNAL INTERFACES
SD card 1 interface UART 2 controllers I2C 2 controllers
SPI 1 controllers with 2chip selects I2S 1 controllers
Table 13 Specification of Edison
는 에디슨과 개의 를 이용하여 제작한 주제어보드이다 포트를 통해 각종
Fig.31 2 FTDI . USB
데이터를 시리얼 통신변환 해주고 센서 값을 읽어 들여 항법에 사용되는 확장칼만필터 알 고리즘을 연산한다.
자세제어보드 4.4.2 자세제어보드는 추진기 방향타 자세제어기를 제어하기 위해 설계되었다, , . Fig.32를 보면 를 메인으로 추진기 방향타 자세제어기의 드라이버와 통신을 위한 로써 Arm M4 , , MCU ST 사의 을 이용하여 소형 모듈을 제작하고 주변회로를 Microelectronics STM32f407 MCU 구성하였다 보드는 . TTL레벨을 RS232레벨로 변환하는 회로를 포함하여 프로토콜에 따라 통신한다. 상위보드인 주제어보드(Intel Edison)와의 통신으로 연산을 통해 액추에이터의 제한범위 내로 변환하고 각 드라이버에 전달한다 또한 자세제어보드는 에러 및 진행사항을 . 종합하여 주제어보드로 전송한다.
Fig. 32 Communication of Attitude control board
(1) ARM M4 (STM32F407V)
사의 계열의 칩으로 보다 월등히 싸고 발열 또한 낮은 장점이
ST ARM Cortex-M4 DSP
있다 제작된 모듈은 정사각형모양으로 가로 세로 길이가 . , 53.5mm로 GPIO, UART, USART,
등 여러 기능을 간단하게 사용 할 수 있도록 설계되었다 는 소형
SPI, I2C . Table20
모듈에 사용된 사의 과 경쟁사인 사의 의 성능을 비교한
MCU ST STM32f407 TI TMS320F28335
것이다. 이전의 ARM계열의 칩은 float형이나 double형 계산에서 DSP보다 느린 단점이
있었으나 이번 M4계열에 FPU라는 float형 계산 chip이 포함되어 DSP와 비슷한 성능을
STM32F407V TMS320F28335 CPU frequency UP to 168Mhz Up to 150Mhz
CPU core 32bit Cortex-M4+FPU C28x Operating voltage 1.8V to 3.6V Core: 1.9V, IO: 3.3V
Package LQFP100 LQFP176/BGA FPU Yes Yes Flash 1024K 512K SPI 3ch 1ch I2C 3ch 1ch UART 6ch 3ch USB Yes No CAN 2ch 2ch GPIO 82 88
ADC 12bit 16ch 12bit 16ch PWM Output Yes Yes
Table 14 Compare of ARM and DSP
는 을 사용하기 위한 회로설계 및 제작한 모듈을 보여준다 설계의 Fig.33 STM32F407chip . 주안점은 기능구현 모듈의 소형화, , ST사에서 제공하는 디버거의 편리한 사용이다 주변 . 회로는 전원 전압 레퍼런스, , 8Mhz 및 32.768khz 오실레이터 디버깅회로를 포함하여 모듈을 , 복잡하지 않게 하고 간편하게 사용할 수 있도록 하였다 모듈의 고장에 대해 교체를 통해 . 간편히 수리하기 위해 자세제어보드와 나누어 설계 및 제작하였다.
Fig. 33 PCB of ARM module
제작된 소형 모듈을 이용하기 위해 소형모듈을 장착할 수 있는 마더보드인
자세제어보드를 설계하였다 자세제어보드는 자세제어모터드라이버 추진기 모터드라이버. , ,
방향타 모터인 서보모터와의 통신 자세제어모듈의 리미트 센서인 포토인터럽트를 인식하기 ,
Fig. 34 Attitude board
Index Value
Voltage 5VDC, ±15V (use Op-amp) Communication type UART or RS232 6ea
PWM channel 4ea (3.3V Level), 2ea (5V Level)
I/O Input 4ea, Output 4ea(3.3V),Output 2ea(5V) DAC 2ea(3.3V Level), 2ea(5V Level)
ADC 2ea(3.3V Level) IO interrupt 6ea
Table 15 Attitude control board Specification
추진기 드라이버 (2) 전방 추진체 모터는 200W급 4-pole BLDC Motor을 적용하였다 기어비 . 6:1, 토크 19.08Nm 최대 속도 2833RPM으로 이를 구동하기 위해 로보큐브사의 400W BLDC모터 드라이버를 적용하였다. 로보큐브사의 모터드라이버 내부에 모터의 위치제어와 속도제어를 위한 알고리즘이 내장되어 있어 실제 추진기의 속도제어 시 모터 컨트롤러를 통하여 정해진 프로토콜에 따라 명령한다.
자세제어기 드라이버 (3) 자세제어보드에서 선체의 Pitch제어가 요구되면 드라이버에 목표값을 전달한다. 드라이버는 로보큐브사의 25W 드라이버를 사용하여 모터를 구동하고 엔코더값을 읽어 , 자세제어보드에 전달한다 자세제어보드는 기구적 제한 범위인 . 200mm내에서 움직여야하는 거리를 연산하고 다음 목표값을 송신하여 모터를 구동한다 이때 위치정확도는 . 1mm이다. 추진기와 자세제어기 드라이버는 각각 400w, 25w의 로보큐브 드라이버를 사용하였고 Table 에 드라이버의 성능지표를 정리하였다 16 .
Fig. 36 25W Motor Driver
Name CUBE-DC2401-SIQ CUBE-BL2416-SIH Number of motor driver 2ea 1ea
ELECTRICAL
Minimum supply voltage 10 V 10 V Nominal supply voltage 24 V 24 V Continuous current 1A 16 A Continuous Power 25 W 400 W
PWM frequency 20KHz ~ 100KHz 20KHz ~ 80KHz Motor coil driving MOSFET GWM 160 Module GWM 160 Module Performance
Speed range 0 ~ 30000 RPM Encoder Yes
Analog hall sensor Yes
RS232 speed 9600 ~ 115200 bps Operating ambiedt temperature -20 ~ 50℃
제 장 복합 항법 알고리즘
무인잠수정의 정밀한 수중도킹을 위해 항법이 필요하며 연구한 항법알고리즘의 목표는 도킹이 가능한 궤적을 계산하여 한 번의 시도에 성공하도록 하는 것이다. Fig.37은 본 연구에서 개발한 잠수정제어알고리즘이다 무인잠수정의 주 제어모드는 임무수행에 필요한 . 항법모드와 운용시간증대를 위한 도킹모드로 전환가능하다. 두 제어 모두 복합항법을 사용하여 위치를 추정하나 항법모드에서는 일반적인 복합항법을 사용하고 도킹모드에서는 광센서를 기반으로 스테이션과의 상대적인 거리와 방향을 고려함으로 항법모드보다 정밀한 자세제어를 통해 도킹을 시도한다. 이 장에서는 잠수정의 일반적인 항해에 관련하여 관성항법을 GPS와 DVL로 보정하는 알고리즘 및 성능시험에 관하여 다룬다.Fig. 37
Control algorithm diagram of AUV
과 같이 무인잠수정의 단순한 주행이나 항해를 통한 임무수행은 항법모드를 Fig.38 사용하여 위치를 추정하고 목표좌표에 도달한다. 주제어기에 저장된 프로그램에 따라 항법모드를 사용하여 선체의 위치를 추정하고 목표좌표에 도달하기 위한 pitch각과 yaw각의 차이를 PD제어기를 통해 결과를 도출하여 자세제어기와 방향타를 제어한다. 다음 위치추정을 위한 GPS, DVL, AHRS, Depth센서의 데이터를 정렬하고 추정한 위치를 통해 목표좌표에 도착여부를 확인하고 도출한 피드백을 사용해 다음 루프를 진행한다.
일반적인 항법 알고리즘은 수상 및 수중항법으로 나누며 5.1절 수상항법과 5.2절 수중항법으로 설명하였다 임무수행을 위해 장착된 항법시스템을 이용하여 선체의 위치를 . 파악하며 위치추정에 사용되는 항법은 IMU나 AHRS를 활용한 관성항법이다. 하지만 관성항법은 로봇이 장거리 주행을 할 때 위치오차가 주행시간에 비례적으로 누적되어 일반적으로 로봇의 위치추정에 사용되는 센서는 관성센서 뿐만 아니라 여러 종류의 센서를 복합적으로 융합해서 사용한다.[5][6] 무인잠수정은 대부분 수중에서 운행하지만 때로는 통신을 위해 수상으로 부상하거나 , 수상에서 운행하기도 한다. 수상항법은 관성센서와 GPS센서를 융합하여 선체의 위치를 추정하는 것으로 시간에 따라 누적되는 오차를 GPS센서로 보정하는 과정을 거친다. 센서는 위성데이터를 받기 시작한 후 분에서 분정도의 시간이 흐른 후에 GPS 20 30 오차범위가 수렴하기 시작하고 환경에 의해 다중경로(multi-path)현상과 파도에 의해 부분적으로 위성이 가려지는 현상으로 수신기의 신호가 불안정 할 수 있다. 하지만 관성센서의 누적오차는 수렴한 GPS데이터로 보정하고 GPS센서의 멀티패스와 신호의 끊김 현상은 관성센서로 보정할 수 있다. 이러한 두 센서의 융합이 각각의 센서의 단점을 보완하고 선체가 더욱 정확한 위치좌표를 얻는데 도움이 된다 수중 항법은 관성항법의 . 지속적인 누적오차를 DVL을 이용해 보정한다 하지만 수중항법은 . GPS를 사용할 수 없기 때문에 보정결과 또한 절대적이지 못하며 무인 잠수정이 도킹 할 수 있는 정밀한 항법을 구축하기 힘들다. 그리하여 본 논문에서는 광학식 센서인 PSD를 이용해 스테이션과의 랑데부에 수중항법을 사용하고 도킹과정에는 PSD센서와 수중항법을 복합적으로 사용하는 연구를 진행하였다. 2장 수학적 모델링의 Vehicle Kinematics 부분에서 구한 선체고정좌표와 관성좌표계의 관계에 따라 (
)를 구하였다. [7][8]
(12) sintan costan cos (13) cos sinsincos cossin cossincos sinsin sin sinsinsin coscos cossinsin sincos cos coscos