2017년 12월 18XX1200
자율주행 자동차의 실시간 제어를 위한 고속
V-Link 통신 기술 개발
High Speed V-Link Communication Technology Development for Real
Time Control of Autonomous Driving Vehicle
본 문서에서 음영처리된 부분은 (
) 정보공개법 제9조의 비공개대상정보와
저작권법 및 그 밖의 다른 법령에서 보호하고 있는 제3자의 권리가 포함된 저작물로
공개대상에서 제외되었습니다.
제 출 문
본 연구보고서는 주요사업 내부연구과제인 "자율주행 자동차의 실시간
제어를 위한 고속 V-Link 통신 기술 개발"의 결과로서, 본 과제에 참여한
아래의 연구팀이 작성한 것입니다.
2017년 12월
연구책임자 : 책임연구원 오 현 서 (한국전자통신연구원)
연구참여자 : 책임연구원 김 진 삼 (한국전자통신연구원)
책임연구원 송 유 승 (한국전자통신연구원)
책임연구원 이 정 우 (한국전자통신연구원)
책임연구원 조 한 벽 (한국전자통신연구원)
책임연구원 한 경 수 (한국전자통신연구원)
선임연구원 오 천 인 (한국전자통신연구원)
선임연구원 이 신 경 (한국전자통신연구원)
선임기술원 강 도 욱 (한국전자통신연구원)
대표이사 정 상 문 (앤트연구소)
책임연구원 기 호 용 (앤트연구소)
책임연구원 박 도 신 (앤트연구소)
책임연구원 유 정 욱 (앤트연구소)
책임연구원 이 기 섭 (앤트연구소)
책임연구원 이 재 철 (앤트연구소)
연구원 채 창 훈 (앤트연구소)
요 약 문
Ⅰ. 제 목
자율주행 자동차의 실시간 제어를 위한 고속 V-Link 통신 기술 개발
Ⅱ. 연구의 필요성
◦ ICT 융복합 스마트 자동차 서비스 창출에 대한 정책적 필요성
- 운전자와 자동차, 자동차와 ICT 인프라 그리고 상호간 연결성(connectivity)
을 기반으로 하여 차량안전, 첨단교통 그리고 클라우드를 기반으로 하는 빅데
이터 서비스를 제공하는 새로운 융·복합 스마트 자동차 서비스 창출에 대한 필
요성 제기
◦ 산업 및 공공 ICT 융합 기술에 대한 로드맵과의 관련성
- 고속 V2X 통신 기술 및 5G 기반 차량 무선 네트워킹 기술과 관련이 되며
해당 기술이 2018년경에 출현될 것으로 전망됨에 따라 전략적 대응이 요구됨
- 도로교통 안전서비스와 관련이 되며 국내외 C-ITS 사업, 스마트 모빌리티
사업과 직접적으로 관련이 되므로 고속 V-Link 기술 개발이 필요함
◦ V2X 통신 주파수 할당 및 R&D 추진에 따른 필요성
- 미국과 유럽은 5.9GHz 주파수 대역을 V2X 통신용으로 할당하고 실용화를
추진함에 따라 국내에서도 2016년까지 5.9GHz 주파수 대역을 할당할 계획을
갖고 있어 해당 기술에 대한 개발이 요구됨
◦ 자율주행 서비스 기술 개발을 위한 요소통신기술 확보의 필요성
- 협력형 자율주행자동차의 실시간 제어를 위한 고속 V-link 통신 모뎀 및
MAC 핵심 원천 기술 확보와 표준화 추진의 필요성이 제기됨
- 차량의 자율주행 서비스와 IoT 서비스 그리고 차량 콘텐츠의 실시간 전송을
위한 무선 네트워킹 기술 확보가 필요함
Ⅲ. 연구내용 및 범위
□ 연구 목표
◦ 자율주행 자동차의 광대역 무선전송 알고리즘 개발 및 소프트웨어 구현
- PER 성능 개선을 위한 V-Link 무선전송 알고리즘 개발 및 에뮬레이터 구
현
- 저 지연 V-Link MAC 알고리즘 개발 및 소프트웨어 구현
- 100Mbps급 V-Link 무선전송 기술 표준화
◦ V-Link 서비스를 위한 단말 구현
- V-Link 서비스를 위한 통신 소프트웨어 구현
Ⅳ. 연구결과
성과목표(최종) 성과지표 당해년도 목표 당해년도 성과 평가방법 1 0 0 M b p s 급 PER=0.01%를 만 족 하 는 V-Link 통신 모뎀 기술 최대 데이 터 전송속 도 108Mbps 108Mbps전송을 위한 Dual RF 무전전송모뎀 RTL 설계 및 시험 검증 완료 기술문서 및 연구 보고서 이동성 400km/h 400km/h 무선환경에서 시뮬레이션 완료 제안 알고리즘의 시뮬레이션 및 연 구보고서 PER 1% 1% 시뮬레이션 완료 산출물 Ÿ 요구사항정의서 Ÿ 모뎀 규격서 Ÿ 논문 및 특허 Ÿ V-Link 모뎀 알고리즘 설계 서 Ÿ V-Link 모뎀 SW Ÿ (V-Link)요구사항정의서 Ÿ 108Mbps급 V-Link 모 뎀 규격서 Ÿ V-Link 모뎀 상세설계서 Ÿ PHY부 RTL Source 기술문서 확인 5msec급 Low Latency를 제 공하는 광대역 V-Link 통신 MAC 기술Latency 10msec 10msec 시뮬레이션 완료
제안 알고리즘의 시뮬레이션 및 연 구보고서 산출물 Ÿ 요구사항정의서 Ÿ V-Link MAC 규격서 Ÿ (V-Link)요구사항정의서 Ÿ (V-Link)시스템 기능규 격서 기술문서 확인
Ÿ 논문 및 특허 Ÿ MAC 스케줄링 연구 보고서 Ÿ V-Link MAC 기술 설계서 Ÿ V-Link MAC SW Ÿ 시험절차 및 결 과서 Ÿ V-Link 통신을 위한 저 지연 하이브리드 MAC 규격서 Ÿ MAC 시뮬레이션 결과서 Ÿ V-Link MAC 기술 설계 서 Ÿ V-Link MAC 시험절차 및 결과서 Ÿ V-Link MAC SW V-Link 무선 전송 기술 표 준화 기고서 국제기고서 1건 국제기고서 2건 국내기고서 2건 기고서 및 표준 심 의 기안문 확인 V-Link 통신 기술 적용을 위한 서비스 및 단말 기술 산출물 Ÿ V-Link 단말 상세 설계 Ÿ V-Link 서비스 SW Ÿ 시스템 소프트웨어 개발 설계서 Ÿ 시스템 소프트웨어 패키 지 Ÿ WAVE Stack 소프트웨 어 개발 설계서 Ÿ WAVE Stack 소프트웨 어 패키지 Ÿ WAVE Stack 소프트웨 어 테스트 결과서 Ÿ Front-End Board 회로 도 Ÿ Front-End Board PCB, Gerber, BOM 기술문서 확인
ABSTRACT
Ⅰ. TITLE
Ⅱ.
Purposes of the Research
CONTENTS
Chapter 1. Introduction ··· 1
Section 1. Necessity of the research ··· 1
Section 2. Object and Content of the research ··· 4
목 차
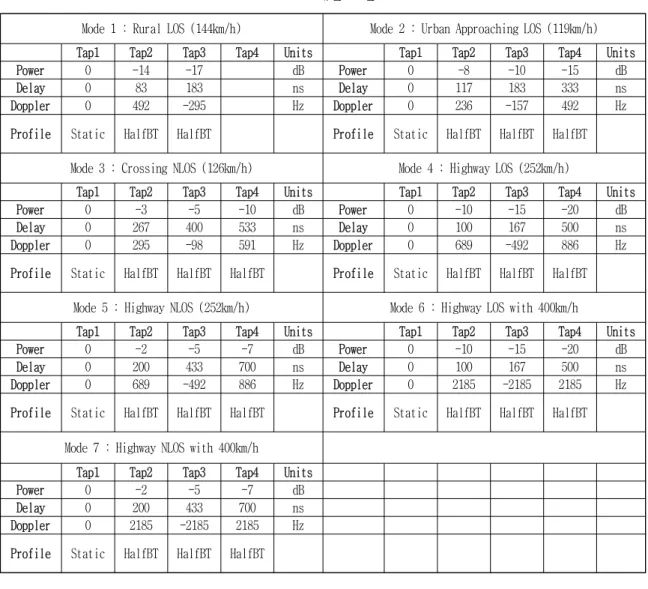
<제목 차례> 제 1 장 연구 개요 ··· 14 제 1 절 연구 목표 ··· 14 제 2 절 개념도 ··· 15 제 3 절 필요성 및 중요성 ··· 17 1. 필요성 ··· 17 2. 중요성 ··· 17 3. 연구개발 과제 수행의 제약 요인 ··· 18 4. 기대효과 ··· 18 제 4 절 기술 동향 ··· 22 1. 국내·외 기술 동향 ··· 22 2. 핵심요소 및 접근방법 ··· 37 제 2 장 당해년도 실적 ··· 39 제 1 절 연구개발 목표 및 추진체계(총년도) ··· 39 1. 목표 ··· 39 2. 추진체계 ··· 41 3. 연구개발 방법 ··· 41 제 2 절 당해년도 연구 목표 ··· 43 1. 연구개발 목표 ··· 43 2. 연구개발 내용 ··· 43 제 3 절 당해연도 추진체계 ··· 44 제 4 절 당해연도 추진일정 ··· 46 제 5 절 연구수행 내용 및 결과 ··· 48 1. PER 성능 개선을 위한 V-Link 무선전송 알고리즘 개발 및 에뮬레이터 구현 ··· 48 2. 저지연 V-Link MAC 알고리즘 개발 및 소프트웨어 구현 ··· 77 3. 100Mbps급 V-link 무선전송 기술 표준화 ··· 98 4. V-Link 서비스를 위한 단말 구현 ··· 105 제 6 절 연구개발 목표의 달성도 ··· 114 제 7 절 당해년도 연구실적 ··· 116 제 8 절 당해년도 연구비 소요예산 ··· 120 제 3 장 차기년도 계획 ··· 121 제 1 절 국내외 연구동향 및 환경변화 ··· 121 제 2 절 차기년도(3차년도) 연구개발 개요 ··· 127 1. 차기년도 연구목표 ··· 127 2. 차기년도 연구개발 내용 ··· 127 제 3 절 차기년도 추진체계 및 전략 ··· 1301. 추진체계 ··· 130 2. 추진전략 ··· 130 제 4 절 차기년도 추진일정 ··· 132 제 5 절 차기년도 추진 성과지표 ··· 134 제 6 절 예상 파급효과 및 활용분야 ··· 135 제 7 절 차기년도 연구비 소요예산 ··· 136 <표 차례> 표 1. 미래창조과학부의 5G MASTER 전략 ··· 23 표 2. 한국전자통신연구원의 5G 핵심 성능 ··· 23 표 3. 삼성의 5G 비전 ··· 24 표 4. 5G PPP의 운용 관련 KPI ··· 27 표 5. METIS 사용자 요구사항 ··· 28 표 6. METIS 시스템 요구사항 ··· 28 표 7. 일본의 5G 요구사항 ··· 29 표 8. IEEE1609 표준화 항목 ··· 31 표 9. 차량통신 국내외 경쟁기관 현황 ··· 33 표 10. 기술개발 성과지표 (총사업연도/2017년도) ··· 39 표 11. 연도별 개발 목표 ··· 39 표 12. 채널 모델 ··· 57 표 13. 108Mbps급 Dual RF 전송을 위한 모뎀 시험 파라미터 ··· 74 표 14. 시뮬레이션 주요 파라미터 ··· 84
표 15. 기존 MAC과 V-Link MAC 간의 성능비교 ··· 88
표 16. V-Link 통신 단말 기능블록 구성 ··· 89
표 17. 서비스 데이터 인터페이스 타입 ··· 93
표 18 국제 표준화 항목 ··· 100
표 19 radio frequency assignment for the radio technologies for ITS applications ·· 103
표 20. 업체별 자율주행 기술 수준 현황 ··· 122 표 21. 자율주행자동차 시장전망(단위 : 천대, %) ··· 123 <그림 차례> 그림 1 ··· 2 그림 2 ··· 2 그림 3. V-Link PHY 통신 기술 ··· 14 그림 4. V-Link MAC 통신 기술 ··· 14 그림 5. V-Link 응용서비스 및 통신 프로토콜 기술 ··· 14 그림 6. V-Link 기술 개념도 ··· 15 그림 7. V2X 기반 도로-자동차 협업 서비스 ··· 22 그림 8. 미국 미시건주 Ann Arbor의 파일럿 테스트 ··· 25 그림 9. 유럽의 V2X 기술 개념도 ··· 25
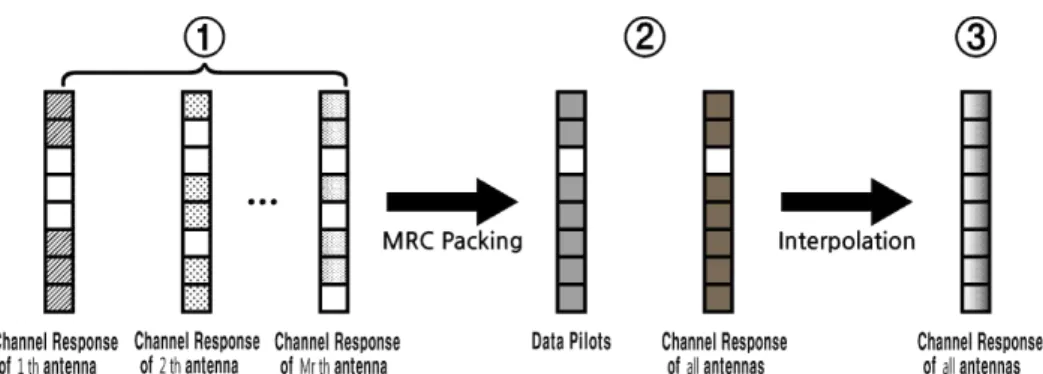
그림 10. 일본 ITS Green Safety 추진 서비스 ··· 26 그림 11. ITU-R의 8가지 핵심 성능 비전 ··· 27 그림 12. 3GPP의 V2X 서비스 유즈케이스 ··· 30 그림 13. 자동차/센서 관련 특허분포 ··· 34 그림 14. 협력주행 제어기술 특허분포 ··· 35 그림 15. V2X 통신기술 특허 분포 ··· 35 그림 16. 차량 통신 기술의 국내외 특허 출원 분포 ··· 36 그림 17. 연도별 주요연구 내용 ··· 40 그림 18. 연구개발 추진 체계도 ··· 41 그림 19. 표준화 추진 전략 ··· 42 그림 20. 당해년도 추진체계 ··· 45 그림 21. Decoded data 기반 반복적 채널 추정 기법 ··· 48 그림 22. TRFIw/VDA 채널 추정기 구조 ··· 49 그림 23. 시간축 채널의 크기 성분 ··· 50 그림 24. 실제 CIR 이외의 잡음이 무시된 시간축 채널 ··· 50 그림 25. MRC-Packing 채널 추정 기법의 블록 다이어그램 ··· 52
그림 26. MRC-Packing & Interpolation 단계 채널 추정 과정 ··· 53
그림 27. TMV(TDL + MRC Packing + VDA)채널 추정 기법의 블록 다이어그램 ··· 54
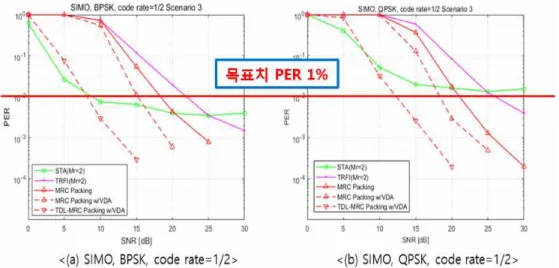
그림 28. 채널 Mode 3 (Street Crossing NLOS) SIMO환경에서 PER ··· 58
그림 29. 채널 Mode 5 (Highway NLOS with 252km/h) SIMO환경에서 PER ··· 58
그림 30. 채널 Mode 7 (Highway NLOS with 400km/h) SIMO환경에서 PER ··· 59
그림 31. 108Mbps급 Dual RF전송이 가능한 V-Link PHY 블록 구성도 ··· 61
그림 32. V-Link 시스템의 FPGA 기반 PHY 블록 Schematic ··· 61
그림 33. PHY 송신 블록 ··· 62
그림 34. PHY FPGA 기반 송신 블록 Schematic 결과 ··· 63
그림 35. Scrambler 블록의 구성도 ··· 63 그림 36. Scrambler 블록 RTL 시뮬레이션 결과 ··· 63 그림 37. Convolution Encoder 블록의 구조도 ··· 64 그림 38. Convolution Encoder 블록 RTL 시뮬레이션 결과 ··· 64 그림 39. Interleaver 블록의 구성도 ··· 64 그림 40. Interleaver 블록 RTL 시뮬레이션 결과 ··· 65 그림 41. Symbol Mapper 블록의 구성도 ··· 65 그림 42. Mapper 블록 RTL 시뮬레이션 결과 ··· 65 그림 43. IFFT 블록의 구성도 ··· 66 그림 44. IFFT 블록 RTL 시뮬레이션 결과 ··· 66
그림 45. Guard Interval Insertion 블록의 구성도 ··· 67
그림 46. GI Insertion 블록 RTL 시뮬레이션 결과 ··· 67
그림 47. PHY 수신 블록 ··· 68
그림 48. PHY FPGA 기반 수신 블록 Schematic 결과 ··· 68
그림 50. 검출 블록 RTL 시뮬레이션 결과 ··· 69 그림 51. Timing 검출 블록 RTL 시뮬레이션 결과 ··· 70 그림 52. 주파수 옵셋 추정 및 보상 블록의 구성도 ··· 70 그림 53. 주파수 옵셋 추정 및 보상 블록 RTL 시뮬레이션 결과 ··· 71 그림 54. 채널 추정 및 보상 블록의 구성도 ··· 71 그림 55. 채널 추정 및 보상 블록 RTL 시뮬레이션 결과 ··· 72 그림 56. 잔류 Phase 추정 및 보상 블록 구성도 ··· 72 그림 57. 잔류 Phase 추정 및 보상 블록 RTL 시뮬레이션 결과 ··· 73 그림 58. Dual RF 전송 검증용 임베디드 플랫폼 ··· 74 그림 59. Dual RF 전송시험 시나리오 ··· 74 그림 60. Dual RF 송신(BW : 10MHz) ··· 75 그림 61. Dual RF 송신(BW : 20MHz) ··· 75 그림 62. 채널별 EVM 측정 결과(BW : 10MHz) ··· 76 그림 63. 채널별 EVM 측정 결과(BW : 20MHz) ··· 76 그림 64. 분산노드 채널 접속을 위한 설계 파라미터 정의 ··· 77 그림 65. 분산노드의 프레임 초기화 및 네트워크 도입 ··· 78 그림 66. 분산노드들의 연속적인 채널 접속 및 패킷전송 ··· 79 그림 67. 중복적 슬롯 할당을 통한 저지연 저간섭 MAC 기술 ··· 80 그림 68. 연속적인 중복할당 시 분산적인 pinching 기술 ··· 80 그림 69. 저지연 패킷 전송을 위한 복수 슬롯 할당 ··· 81 그림 70. (a) 표준밀도 교통모델 (b) 고밀도 교통모델 ··· 82 그림 71. 고밀도 차량환경에서의 노드배치 ··· 83 그림 72. 고밀도 환경에서의 차량노드 배치 확대도 ··· 83 그림 73. 표준밀도환경에서의 차량노드배치 확대도 ··· 83 그림 74. 고밀도 환경 응용계층의 노드별 수신 패킷 ··· 85 그림 75. 고밀도 환경 전송계층의 노드별 수신 패킷 ··· 85 그림 76. 고밀도 환경 네트워크 계층의 노드별 수신 패킷 ··· 86 그림 77. 고밀도 환경 MAC계층의 노드별 수신 패킷 ··· 87 그림 78. 고밀도 환경 네트워크 계층의 노드별 지연시간 ··· 88 그림 79. V-Link 통신 단말 구조 ··· 89 그림 80. V-Link MAC SW 구성도 ··· 90 그림 81. MAC 데이터 송신기능 처리 흐름도 ··· 91 그림 82. 802.11p 프레임 구조 ··· 92 그림 83. MAC 데이터 수신기능 처리 흐름도 ··· 93 그림 84. 100Mbps 지원을 위한 MAC 데이터 송신 구조 ··· 94 그림 85. 100Mbps 지원을 위한 MAC 데이터 수신 구조 ··· 95 그림 86. 차량 통신 시스템 구조 ··· 99 그림 87. 차량 통신 시스템 구성 ··· 100
그림 88. ITS System Configuration ··· 102
그림 90. Device tree 수정 예 ··· 107
그림 91. PL Register I/F 설정 예 ··· 108
그림 92. RF Transceiver 초기화 예 ··· 109
그림 93. V-LINK Evaluation Board 구성 ··· 110
그림 94. RF Front-end Board 구성 ··· 111
그림 95. RF Front-end Board Layout ··· 111
그림 96. RF Front-end Module Schematic ··· 112
그림 97. WAVE 통신 스택 개발 ··· 113
그림 98. Auto Pilot 시스템 개념 ··· 121
그림 99. 미국의 Smart City 개념(출처: 스마트시티 홍보자료) ··· 123
그림 100. 국토교통부 자율주행 실험도시 개념 ··· 124
그림 101. V-Link 시스템 구성도 ··· 127
그림 102. STDMA 기반 V-Link MAC SW 구성 ··· 128
제 1 장 연구 개요
제 1 절 연구 목표
고속으로 이동하는 차량 환경에서 차량주변의 위험 상황 정보와 차량 제어정 보를 전달하기 위하여 100 Mbps 급 무선전송과 5msec 급 Latency를 갖는 무선전송 모뎀/MAC 기술 개발 - 100Mbps급 PER=0.01%를 만족하는 V-Link 통신 모뎀 기술 - 5msec급 Low Latency를 제공하는 광대역 V-Link 통신 MAC 기술 - V-Link 무선 전송 기술 표준화- V-Link 통신 기술 적용을 위한 서비스 및 통신 프로토콜 기술
그림 3. V-Link PHY 통신 기술
그림 4. V-Link MAC 통신 기술
제 2 절 개념도
그림 6. V-Link 기술 개념도 자율주행 자동차에서는 360°Safety Belt를 형성하기 위해 대용량 센서 융합 정보가 발생되며 차량과 인프라간 정보 전달을 위해 V2X connectivity가 필요한 상황으로 이와 관련하여 차량에서 다수의 레이더와 카메라를 이용한 주변 차량 정 보와 차량의 운행 제어정보가 생성됨에 따라 100Mbps급 데이터 전송과 실시간/신 뢰성이 요구되며 차량에서 발생되는 정보는 V2X Connectivity를 통해 주변 차량과 인프라에 제공함으로써 차량 센서의 가격을 줄이고 차량의 인식 한계를 극복할 수 있음 ○ 자율주행자동차는 인프라와 협력을 위해 V2X 통신을 활용 - 차량에서 V2X 통신을 이용하면 차량 레이더 센서의 인지 범위와 각도를 크게 확 장 할 수 있으므로 차량에서의 센서 비용을 줄일 수 있음 - V2X 통신의 신뢰성을 향상시킴으로서 차량주행제어 정보를 차량간에 공유하고 제어 분야에 적용하여 주행 안전성과 편리성을 크게 향상 시킬 수 있음 ○ 수백 Mbps급 광대역 V2X 무선 전송 기술 - 차량 고속주행 환경에서 100Mbps급 무선전송 기술은 동시에 다수의 차량이 통신 을 시도하는 환경에서 Low Latency를 유지하면서 무선으로 정보를 제공할 수 있 음 - PER=0.01%를 만족하는 무선전송 모뎀은 신뢰성이 크게 향상되어 차량 안전 뿐 만 아니라 주행제어에도 적용할 수 있는 기술로 응용범위가 큼 - 광대역 전송 기술을 이용하여 기준신호를 송수신함으로써 차량간 상대거리의 추 정이 가능하여 레이더 기능과 보완적으로 사용할 수 있음○ WAVE와 V-Link 규격 비교 WAVE V-Link
RF Frequency
5 855-5 925MHz
좌동 RF Channel Bandwidth 10 MHz10MHz, 20MHz
40MHz(Dual Channel)
RF Transmit
Power
20 dBm 좌동Modulation Type OFDM (BPSK, QPSK,
16QAM, 64QAM) 좌동
Data Rate 3, 4.5, 6, 9, 12, 18, 24, 27 Mbit/s
3, 4.5, 6, 9, 12, 18, 24, 27, 36, 48, 54, 96, 108 Mbit/s
MAC CSMA/CA Hybrid MAC(CSMA/CA,
TDMA)
제 3 절 필요성 및 중요성
1. 필요성
○ ICT 융복합 스마트 자동차 서비스 창출에 대한 정책적 필요성 - 운전자와 자동차, 자동차와 ICT 인프라 그리고 상호간 연결성(connectivity)을 기반으로 하여 차량안전, 첨단교통 그리고 클라우드를 기반으로 하는 빅데이터 서비스를 제공하는 새로운 융·복합 스마트 자동차 서비스 창출에 대한 필요성 제기 ○ 산업 및 공공 ICT 융합 기술에 대한 로드맵과의 관련성 - 고속 V2X 통신 기술 및 5G 기반 차량 무선 네트워킹 기술과 관련이 되며 해당 기술이 2018년경에 출현될 것으로 전망됨에 따라 전략적 대응이 요구됨 - 도로교통 안전서비스와 관련이 되며 국내외 C-ITS 사업, 스마트 모빌리티 사업 과 직접적으로 관련이 되므로 고속 V-Link 기술 개발이 필요함 ○ V2X 통신 주파수 할당 및 R&D 추진에 따른 필요성 - 미국과 유럽은 5.9GHz 주파수 대역을 V2X 통신용으로 할당하고 실용화를 추진함 에 따라 국내에서도 2016년까지 5.9GHz 주파수 대역을 할당할 계획을 갖고 있어 해당 기술에 대한 개발이 요구됨 ○ 자율주행 서비스 기술 개발을 위한 요소통신기술 확보의 필요성 - 협력형 자율주행자동차의 실시간 제어를 위한 고속 V-link 통신 모뎀 및 MAC 핵 심 원천 기술 확보와 표준화 추진의 필요성이 제기됨 - 차량의 자율주행 서비스와 IoT 서비스 그리고 차량 콘텐츠의 실시간 전송을 위 한 무선 네트워킹 기술 확보가 필요함2. 중요성
○ 자율주행 자동차는 주변 차량과 인프라간 통신 및 센서 융합 기술이 필요함 - 차량의 전방향 센서와 V2V 통신을 기반으로 실시간으로 주변차량에 전달하고 제 어를 함으로써 협력형 ACC 서비스 및 자율주행제어 서비스를 제공할 수 있음 - 도로의 돌발 상황 정보와 신호등 정보를 차량에 제공함으로써 차량이 도로 상황 을 인지하며 교차로 안전 지원 및 자율주행 서비스를 제공할 수 있음○ 현재 기술의 한계
- 현재 V2X 차량 통신 기술로 WAVE는 국내 C-ITS 시범 사업에서 뿐만 아니라 전 세계적으로 다양한 프로젝트를 통한 차량안전 서비스 성능 시험을 진행하고 있 다. 미국 DOT(Department of Transportation)는 2012년부터 Safety Pilot 과제 를 추진하고 있으며, 미시건 앤아버에 통신망을 구축하고 약 3,000대의 단말을 차량에 장착하여 통신과 서비스를 시험하였으며, 시험 결과 약 70~80%의 교통사 고 위험상황에서의 충돌 예방에 도움이 되는 것을 확인함 - 하지만, 차량 안전 메시지는 100msec Latency 이하를 만족하여야 하나 해당 시 험에서 수백대의 차량이 동시에 운용되는 환경에서는 서비스를 위한 패킷 Latency 가 증가하는 문제가 있음 - 서비스 시험을 위한 WAVE 데이터 전송속도는 통신 신뢰성 보장을 위하여 주로 6Mbps를 사용하고 있으며 이로 인한 수백대의 차량에게 통신 서비스를 제공해야 하는 환경에서는 충분한 데이터 전송속도를 제공하지 못함
3. 연구개발 과제 수행의 제약 요인
○ 국내 차량용 주파수 할당에 따른 제약 - 국내에서는 차량용 주파수 할당이 2016년도에 계획되어 있어 통신 시스템의 시 작품 개발 시 통신 주파수에 따른 개발의 지연이나 혼선이 발생할 수 있음 - 2016년에 할당될 국내 차량용 주파수와 해외의 주파수가 상이할 경우 이중적인 개발 부담이 발생할 수 있음 ○ 5G 통신 기술과의 차별적 개발 전략 요구 - LTE 혹은 5G의 통신 기술이 계속적인 기술규격 개정을 통해 차량분야의 통신 요 구사항을 반영함에 따라 V-Link 기술 개발의 차별성 및 독창성이 요구됨4. 기대효과
가. 기술적 측면
○ 차량용 광대역 무선전송기술 IPR 확보를 통한 국가 기술 경쟁력 강화 - 현재의 WAVE 기술이 10MHz 혹은 10MHz 채널 대역에 적합한 IEEE802.11p 및 IEEE1609.x 규격으로 구성되어 있으나 V-Link 기술은 40MHz 이상의 광대역 채널 을 활용한 기술로서 새로운 광대역 차량용 무선전송 기술 확보와 표준 특허 확 보를 통한 국가 경쟁력 증대○ 자율주행 자동차 및 미래 자동화 도로 시스템의 원천 기술로 활용 가능 - 수ms 이내의 지연시간(Latency)을 갖는 V-Link 통신기술은 현재 연구되고 있는 자율주행에 필요한 핵심요소기술이며 또한 다양한 광대역 서비스를 끊김 없이 제공할 수 있는 성능 요구조건을 만족시킴으로서 미래의 스마트 카 및 스마트 도로의 원천기술로 활용 가능 ○ 차량의 안전주행 및 운전자 편의를 제공하기 위한 기반기술 확보 - 2014년도부터 추진 중인 C-ITS 사업에서는 V2X 기술을 바탕으로 긴급차량 접근 경고, 전방 교통정체 경고, 공사구간 위험경고, 보행자와 차량간 위험 경고 등 15 가지의 시범 서비스들을 시험 추진 중에 있으며 V-Link 기술은 이러한 안전주행 및 운전자 편의 서비스들을 보다 다양하고 신뢰성 있는 링크를 광대역 서비스를 통해 다수의 차량에게 동시에 제공하는 기반기술을 제공함
나. 산업적 측면
○ V-Link 기술 개발을 통한 국내외 표준화 및 자동차/ ITS 산업 육성에 기여 - 미국의 ASTM 주도 표준화 작업이 시작된 기존 WAVE(DSRC) 통신 규격은 국내 표 준화 참여 및 기여가 미비하였으나 차세대 V-Link 기술은 새로운 2세대 차량통 신 표준으로 표준 선도 및 관련 자동차 업계의 새로운 ITS 산업 성장 원동력 제 공 ○ 기술 선도 기관인 미국, 일본 그리고 유럽 등에 대한 기술 격차를 해소 - 스마트 도로교통 관련 안전지원 시스템 분야와 인증/보안 분야에 다수의 표준과 특허들을 미국과 유럽이 주도하고 있으나 한국에서도 군집 및 자율주행 서비스 를 위한 통신 프로파일 및 메시지 정의 분야에 선전하고 있어 V-Link 기술을 통 한 기술 격차 해소 및 해당 차량통신 분야에 적극적 공략을 통한 선도 기술 경 쟁의 발판을 마련할 수 있음다. 경제적 측면
○ 차량/도로에서 생성되는 센서 정보 융합으로 새로운 비즈니스 창출에 기여 - 2012년 기준 가장 큰 스마트/지능형 센서 시장은 유럽이며 특히 자동차 산업이 유럽의 스마트/지능형 센서 시장을 견인하고 있으며 2012년 90억 달러에서 2019 년 216억 달러 규모로 성장할 전망 - 차량 센서와 통신, 제어, 임베디드 SW, 서비스를 융합한 기술로 새로운 부가가 치를 창출하고 2020년경 세계시장 규모는 70억 달러, 국내 시장은 3000억 원 정 도로 예상됨○ ITS 무선통신 기술은 자율주행자동차 및 C-ITS 시장과 사업기회를 창출
- 정보통신산업진흥원(NIPA)이 운영하는 IT 지식포털(ITFIND)에 게재된 ‘ICT 브 리프(2015-9호)’에 따르면 세계 V2X 시장은 향후 2020년까지 약 1900만대 수준 에 이르고 보급률은 16%에 미칠 것으로 전망
○ 광대역 통신을 활용한 자율주행차량의 신산업 IoT 분야로 시장 확대 기대 - 실감/감성을 지원하는 차량 멀티미디어 서비스로 확대됨에 따라 차량용 고속 데
이터 전송기술개발의 수요가 점차 증가
- ICBM(IoT, Cloud, Big data, Mobile) 발전 추세가 2010년 2ZB에서 2020년에는 35ZB로 데이터의 폭발적 증가가 예상됨에 따라 광대역 차량 통신 서비스 시장이 확대 될 것으로 전망
- CVC(Connected Vehicle Cloud) 선두주자인 Ericsson은 4G기반 서비스 및 기술을 개발 중이며 2020년경에는 서비스 수요의 증가로 차세대 광대역 V2X 통신기술 및 관련 서비스를 도입할 전망 ○ 사물간 통신, IoT 분야 등의 표준 전문가 및 인력 양성을 통한 시장 확대 - 국내 사물지능통신 시장은 2010년 2.3조원에서 2020년 26조원으로 연평균 30%이 상 급성장이 전망되고 있으며 Gartner는 2020년 2천억 개에서 2040년 1조개 이 상으로 폭발적으로 사물 및 기기가 증가할 것으로 예상 - 미국, 유럽, 일본 등 선진국에서는 사물지능통신의 중요성을 인식하여 다양한 프로젝트를 진행하고 있으며 사물지능통신 시장을 통한 신규시장 창출을 위해 노력 - V-Link 기술 확보를 통한 사물간 통신 및 IoT 분야 전문가 양성은 미래 시장 기 술을 선점하고 새로운 산업육성의 계기로 작용할 것으로 기대
라. 사회적 측면
○ 자동차 및 도로 사고율 감소로 인한 처리 비용 감소 - 교통 혼잡과 이에 따른 사회적 비용이 2000년 이후 3.98% 증가추세이며 2008년 기준 교통혼잡비용은 26.9조원, 교통사고비용은 15.7조원에 달하고 있어 2020년 까지 V2X 통신기반의 ITS 기술을 활용하여 혼잡비용 1.3조원/년 절감 및 교통 사고 감소 최대 81% 감소 등을 목표로 제시함 ○ 자동차의 CO2 감소로 인한 환경 개선 및 환경 모니터링이 가능함 - 자동차 등록대수의 증가속도는 2002년 이후 2.32% 증가율에서 2020년까지 연평 균 1.6%로 증가하여 2,033만대에 달할 것으로 예상되며 자동차가 전체 온실가스배출량의 14%를 차지하고 있어 정부는 2020년까지 ITS기술을 통해 교통부문 온 실가스 배출을 34% 감축을 통해 전체 온실가스 220만톤/년을 목표로 제시함
제 4 절 기술 동향
1. 국내·외 기술 동향
가. 국내 기술 동향
○ WAVE 기술 동향 - 국토교통부와 한국도로공사는 차세대 지능형교통체계(C-ITS) 시범사업을 추진하 고 있으며, 또한, 고속도로에서 돌발 상황 알림, 차량 정보 수집 및 제공 등의 교통안전 서비스 제공, 안전성과 편리성, 차량 연료를 감소를 목표로 2015년부 터 스마트 모빌리티 기술개발 사업 추진 - 자율협력주행도로시스템기술개발과제에서는 차량과 인프라간 접속을 통하여 차 량간 정보 공유, 차량과 인프라간 LDM 정보와 도로 상황 정보 공유를 통하여 협 력 주행 제어 기술연구를 추진하고 있음 그림 7. V2X 기반 도로-자동차 협업 서비스 ○ 5G 관련 기술동향 - 미래창조과학부에서는 5G 이동통신을 ICT 산업을 혁신하는 지식·정보 유통의 기반이며, 사업 전후방 효과가 큰 국가산업으로 인식하고, 2014년 2월‘미래 이 동통신 산업발전전략’을 발표하였으며 5G 네트워크의 4대 기술 목표로 1천배 빠른 전송속도, 1천배 많은 디바이스 수용, 1천분의 1초 서비스 지연 단축, 1천 배 에너지 효율 4가지를 제시하였음, 추진 방안으로 Market activator, Standard frontier, Technology leader 및 ecosystem renovator의 5G MASTER 전 략을 제시하였음전략 주요내용 Market Activator 5대 핵심 서비스 발굴 및 2020년 세계 최초 상용 서비스 실현 → 시장 선점효과 확대 Standard frontier 3G 첫 국제표준 참여 → 4G 표준 경쟁 → 5G에서는 국 제공조를 통한 글로벌 협력 기반 표준화 추진 Technology leader 5G 기술 확보를 위해 선도형 연구개발 추진 Ecosystem renovator 산업체질 강호를 위해 중소기업 지원 확대 표 1. 미래창조과학부의 5G MASTER 전략 - 한국전자통신연구원에서는 5G 통신을 ‘언제 어디서나 환경의 제약 없이 사람과 사물을 포함한 모든 사용자에게 지연 없이 Gbps급 서비스를 비용/에너지 효율적 으로 제공하는 통신’으로 정의하고 5G 핵심기술 확보를 위해 5G 연구개발 사업 으로 5G 통합사업과 기가 코리라 5G 사업을 수행하고 있으며 5G 통신에 대한 요 구사항을 아래 표와 같이 제시함 파라미터 값 최대 전송속도 100Gbps 사용자당 최소 전송속도 1Gbps 주파수 효율 4G대비 15배 전송 지연 1ms(무선 구간), 5ms(코어망 구간) 이동 속도 500km/h 단위면적당 연결 수 1,000,000개/㎢ 에너지 효율 4G대비 100배 단위면적당 전송용량 4G대비 100배 표 2. 한국전자통신연구원의 5G 핵심 성능 - 삼성은 5G 비전으로 아래와 같이 4가지 사항을 제시하였으며 RAN 관련 enabling 기술 제시: 6GHz 이상 기술, FQAM(Frequency and Quadrature Modulation)/FBMC(Filter Bank Multi-carrier)등의 코딩/변조 및 다중접속 기 술, advanced MIMO 및 beamforming, enhanced DeD, advanced small cell(wireless backhaul, increased density, no cell boundary), interference
management 등
항목 기술진화
Everything on Cloud 전송지연 50ms, HD video(1.2GB)다운로드 20분 → E2E 네트워크 전송지연 5ms, 전송률 1Gbps이상
Immersive Experience
720p HD, 12명 → 8K HUD, 100명 이상 (720p HD는 5Mbps, 8K UHD는 85Mbps전송률 필요, 셀 throughput 10Gbps 이상)
Ubiquitous connectivity 사람 중심 제한적 제어 → An intelligent web of connected things
Intuitive remote access 단거리, 제한적 제어 → 원거리, 실시간 전체 제어 표 3. 삼성의 5G 비전
나. 국외 기술 동향
○ WAVE 기술 동향
- 미국은 2003년부터 VII, IntelliDrive, Connected Vehicle 등의 프로젝트를 추 진하여 왔으며 실제 도로 현장에서의 테스트인‘Safety Pilot’을 추진하면서 정해진 테스트베드 상에서 실제 운전자를 대상으로 서비스를 검증한 ‘Safety Pilot Driver Clinics’와 실제 도로 상에서 V2V 또는 V2I 통신 장치의 실제 상 황에서의 서비스 유효성을 검증하는 ‘Safety Pilot Model Deployment’의 두 단계로 진행됨
그림 8. 미국 미시건주 Ann Arbor의 파일럿 테스트 - 유럽은 2006년부터 CVIS 프로젝트를 진행하여 V2X 관련 단말의 표준화, 차량과 도로장비의 트래픽 및 네트워크 모니터링 시스템 구축 등을 추진하였으며, Drive C2X, Compass 시범 사업을 추진하고 자동차와 도로 인프라간의 협업을 통 한 교통의 효율성과 안전성을 증대, 그리고 자율주행 관련 여러 기반기술을 확 보 함 그림 9. 유럽의 V2X 기술 개념도 - 일본은 ITS Japan 사업을 국토교통성, 경찰철, 총무성, 경제산업성이 연계하여 추진하고 있으며, 중앙센터에서 수집 및 처리된 교통정체, 교통규제 등에 대한 도로교통정보를 실시간으로 차내 장치를 통해 제공하는 VICS(Vehicle Information and Communication System), V2I 통신에 의해 운전자의 인지나 판
단의 지연 및 잘못에 의한 교통사고를 방지하기 위한 DSSS(Driving Safety Support System) 등이 추진되었으며 이 사업의 일환으로 ‘안전하고 친환경적인 사회(Greener and Safer Society)’실현을 위한 민관협력 프로젝트 ‘ITS Green Safety’가 추진되고 있음
그림 10. 일본 ITS Green Safety 추진 서비스
○ 5G 관련 기술동향 - ITU-R에서는 5G 이동통신 파라미터를 8개로 분류하여 8가지 핵심성능 비전을 제 시함, IMT-2020은 5G 이동통신을 IMT-Advanced는 4G 이동통신을 나타내며 기술 동향 보고서에서는 기술 구분에 따라 이동통신 기술을 다루고 있는데, 기술구분 은 무선 인터페이스 기술, 새로운 서비스 기술, 사용자 경험 향상 기술, 에너지 효율 향상 기술, 단말 기술, 네트워크 기술, 사생화/보안 기술 및 전송속도 향 상기술로 구분함, 새로운 서비스 관련 기술에 D2D, M2M, 재난용 Group 통신 등 이 포함됨
그림 11. ITU-R의 8가지 핵심 성능 비전
- 5G PPP(Public-Private Partnership)는 범유럽 연구개발 프로그램인 Horizon 2020 중에서 5G 관련 연구개발을 수행하기 위한 프로그램이며 운용상 요구사항 (KPI: Key Performance Index)으로 아래 표와 같이 6가지를 제시하고 있으며 운 용 관련 요구사항 이외에도 사업 관련 요구사항 및 사회 관련 요구사항을 정의 하고 있는데, 사회 관련 요구사항에 ‘U-HDTV 및 M2M과 같은 새로운 서비스’를 포함하고 있음 파라미터 값 전송용량 면적당 용량 1000배 이상 연결된 디바이스 10~100배 이상 사용자당 전송속도 10~1000배 이상 에너지 소모 10배 이상 더 적게 전송 지연 단대단 1ms 이하 액세스 저밀도 지역에서도 유비쿼터스 5G 액세스 표 4. 5G PPP의 운용 관련 KPI
- METIS 2020(Mobile and wireless communications Enablers for Twenty-twenty Information Society)은 5G 이동통신 관련 전 세계의 개념 및 합의 형성을 위한 FP7(Seventh Framework Programme)프로젝트의 하나임, 5G 시나리오로
‘Amazingly fast’, ‘Great service in a crowd’, ‘Best experience follows you’, ‘Super real-time and reliable connections’, ‘Ubiquitous things communicating’ 5가지를 제시하고 있으며, 시나리오와 연계하여 test case 12가지를 발굴하였음, 사용자 요구사항과 시스템 요구사항은 아래 표와 같 음 파라미터 값 전송용량 면적당 용량 1000배 이상 연결된 디바이스 10~100배 이상 사용자당 전송속도 10~1000배 이상 에너지 소모 10배 이상 더 적게 전송지연 5배 이하 더 적게 표 5. METIS 사용자 요구사항 파라미터 값 전송속도 1~10Gbps 용량 36TB/month/user 스펙트럼 더 높은 주파수와 융통성 에너지 현재 소모량의 10% 전송 지연 1ms
D2D능력 NSPS(National Security and Public Safety), ITS등 신뢰성 시간상 99.999% 커버리지 LTE의 20dB이상 배터리 10년 면적당 디바이스 액세스 노드당 300,000 표 6. METIS 시스템 요구사항
- METIS는 전반적인 시스템 관점에서의 주제를 ‘Direct Device-to-Device Communication’, ‘Massive Machine communication’, ‘Moving Networks’, ‘Ultra-Dense Networks’, ‘Ultra-reliable Communications’5 가지로 분류하 고 있음
- 일본은 ‘ARIB 2020 and Beyond Ad Hoc Group’을 구성하여 5G 백서를 2010년 작성함,
하여 5G 기술연구, 5G 표준, 정보수집, 국제 협력 및 5G 홍보 예정이며 일본의 5G 요구사항은 아래 표와 같음 파라미터 값 최대 전송속도 10Gbps 이상 이동성 500km/h 면적당 용량 1000배 이상 연결 단말수 셀당 10,000개 사용자 평면 지연 1ms 에너지 감소 1/n 표 7. 일본의 5G 요구사항
다. 국내·외 표준화 현황
○ 3GPP - 3GPP에서는 2014년 12월부터 V2X 서비스를 위한 연구아이템으로 Study on LTE Support for V2X 서비스를 선정하여 표준화를 추진하고 있음 - 이 표준의 목적은 V2X 서비스를 고려하여 V2X 서비스를 지원하는 유즈케이스와 필요한 요구사항을 규정하고, 관련 정부기구 사업 즉 국토교통부에서 추진하고 있는 C-ITS 프로젝트를 포함한 GSMA Connected Living, ETSI ITS (Intelligent Transportation System), US SAE 같은 타 표준화 기구에서 규정한 관련 파라미 터를 규정하는 것임 - V2V, V2I, 및 V2P 를 포함하는 LTE V2X의 필수 유즈케이스와 확인할 요구사항은 다음과 같음 § V2V: 차량사이의 LTE 기반 통신 § V2P: 차량과 개인 소형단말(Handheld) 기기 사이의 LTE 기반 통신 § V2I: 차량과 노변에 설치된 장치 사이의 LTE 기반 통신그림 12. 3GPP의 V2X 서비스 유즈케이스 - 3GPP에서 다루는 V2X 범위에 있는 V2V, V2P 및 V2I 각각은 유기적 관계를 갖고 있으며, 차량, 노변 기지국, 차량내 승객 및 차량 인접 개인 단말기 사이의 연 결성(Connectivity)을 보장할 수 있는 LTE 이동 네트워크 구축방안을 정립하고 자 노력하고 있음 - 특히 사고정보 전달이나 위험정보를 전송하는 통신시스템 활용 서비스 개발에 주목하고 있으며 V2V와 V2I를 통하여 제공하는 여러 가지 서비스를 규정하고 있 으며 V2X 서비스는 ITS America에서 규정한 50 가지 서비스 외에 국제적 표준화 기구와 우리나라 C-ITS 서비스에서도 많이 규정하고 있으며, 대표적인 서비스는 도로안전서비스(Road Safety Services), 네트워크 커버리지 밖의 V2X 서비스, 인프라를 통한 도로안전서비스, 보행자충돌경고 서비스 등이 주요하게 논의되고 있음 - 이외에 중요한 서비스는 네트워크 커버리지 밖의 V2X 서비스로 전통적인 차량간 통신 서비스로 해석할 수 있으며 인프라가 구축되지 않았거나 네트워크 커버리 지를 벗어난 지역에서는 차량간 직접 통신이 가능하며, 재난 발생 등으로 E-UTRAN이 서비스 되지 않는 지역에 위치할 때에 V2X 통신 시나리오를 기술하고 있음 - 이 서비스를 위해서는 통신하려는 모든 차량에 V2V 서비스를 지원하는 사용자 단말이 장착되어 있어야 하고 E-UTRAN이 서비스 되지 않는 지역에 포함되어 있 으며 또한 E-UTRAN이 지원되지 않는 지역에 효과적인 파라미터 설정이 이루어져 있어야 하며, 각 차량은 상대차량의 위치, 방향, 속도를 인식하게 되어 서비스 를 실행함 - 이 서비스를 제공하기 위해서는 허가대역이 필요하고 정해진 기술기준이 설정되 어 있어야 하며 현재 이 서비스를 3GPP 네트워크, 3GPP EPC(Evolved Packet Core) 혹은 사업권이 있는 이동통신망 사업자가 제공하는 3GPP 시스템으로 제공 하기 위해서는 기관간의 협정 등 추가적인 연구가 필요한 상황임 ○ IEEE
- IEEE1609에서는 2010년 12월부터 WAVE(Wireless Access in Vehicular Environments) 시스템 표준화를 추진하고 있고 이 표준의 목적은 IEEE802.11 기 반의 무선통신표준 위에 차량에 적합한 다채널 운영, 네트워킹, 보안표준 등을 포함한 무선접속기술 표준화를 추진하는 것임 - 현재는 1차 버전을 완성하고 개정 작업을 진행하고 있으며 표준화 아이템 목록 은 다음과 같음 문제번호 문서제목 단계 IEEE 1609.2™ /D9
Draft Standard for Wireless Access in Vehicular Environments - Security Services for Applications and 5 Management Message
개정 중
IEEE 1609.3™ /D3
Draft Standard for Wireless Access in Vehicular Environments (WAVE) - Networking
Servicess
개정 중
IEEE 1609.4™ /D4
Draft Standard for Wireless Access in Vehicular Environments (WAVE)— Multi-channel Operation Corrigendum 1:
Miscellaneous Corrections
개정 중
IEEE 1609.11™
Draft Standard for Wireless Access in Vehicular Environments (WAVE) - Over-the-Air Electronic Payment Data
Exchange Protocol for Intelligent Transportation Systems (ITS)
2010년 완료
IEEE P1609.12™/D6
Draft Standard for Wireless Access in Vehicular Environments (WAVE) - Identifier
Allocations
진행 중 표 8. IEEE1609 표준화 항목
○ TTA
- 국내에서는 TTA PG905를 중심으로 ITS/차량 ICT 기술에 관련한 차량 및 도로 통 신 네트워크 기술, 운전자 지원 기술, 응용 및 서비스 기술, 도로 센서 네트워 크 기술 등에 관련한 표준 개발이 이뤄지고 있으며 기타 차량 ICT 관련 국제 표 준기구와의 협력도 함께 진행되고 있음 - TTA의 TC7 PG708을 중심으로 사물지능통신 관련 국내 표준을 개발 중에 있으며 보안 관련 부분은 TC5 PG504를 중심으로 차량 간 통신환경에서의 메시지 암호화 규격, 차량 간 통신 보안 요구사항 등 지속적인 표준화 활동이 진행되고 있음 - 최근 제정된 통신 프로파일 및 메시지 관련한 표준 동향은 지능형 교통체계 통 신 시스템 분야의 인터페이스 기술, 협력주행 환경에 필요한 메시지 그리고 모 바일 단말과 차량 간의 데이터 프로토콜 등이며 협력주행이나 자동유도를 위한 데이터 교환 프로토콜 기술들이 과제로 채택되어 진행되고 있음
○ ITS Korea - 지능형 교통시스템(ITS) 산업의 효율적인 발전을 위해 ITS 표준화 선도에 노력 하고 있으며 특히 ITS 분야 전반에 걸친 표준기반조성, 표준개발지원 및 표준보 급과 유지 관리 등을 지원하고 있음 - 표준기반조성을 위해 2000년대부터 국가 ITS기술 표준화 사업을 수행하였고 이 어서 국가 ITS 기술 표준화 연구 및 표준적용방안 등을 연구하였으며 최근 교통 정보 연계제공 표준화 방안 연구, ITS 교차로 신호경고시스템 시험평가방안 국 제 표준개발, 돌발 상황 검지시스템 표준규격 및 성능기준 개발에 이어 ITS 표 준정비와 제/개정을 계속해서 추진하고 있음 - 표준 개발 지원을 위해 최근 대중교통 정보교환 기술기준, DSRC를 이용한 ETCS 의 정보교환 기술기준, 기본교통정보 교환 기술기준 등의 여러 기술기준을 완료 하였으며 ITS관련 단체표준으로는 ETCS 성능시험방법에 대한 표준, DSRC를 이용 한 교통정보제공 OBU 성능시험방법에 관한 표준 등 ETCS에 관련한 인터페이스와 요구사항 등을 제정함
라. 동일, 유사 내용에 대한 국내외 관련자들의 수행내용
○ 국내 관련자들의 수행 내용 - 국내에서는 자동차사와 관련 기업체를 중심으로 ACC 시스템 개발 및 양산에 이 어 V2X 통신 기술 개발을 통한 차량과 차량 그리고 도로 연계 자동순항(ACC) 기 술까지 점차 확보해감으로써 군집주행 서비스까지 가능한 기술을 확보하고 있으 며, 표준을 기반으로 양산수준의 시스템을 개발 중에 있음 - 미래창조과학부는 자율안전주행을 위한 협력제어통신/보안 기술 및 핵심 코어칩 개발을 2012년 6월부터 2016년 5월까지 추진 중에 있으며 ㈜에이디칩스를 주관 으로 하여 차량간 통신을 이용한 무선망 구축과 차량운행 정보를 실시간으로 제 공함으로써 군집주행 및 차세대 지능형 교통시스템 구축에 필요한 기술을 확보 하고 있으며 서비스에 필요한 통신 메시지 및 프로토콜들을 함께 개발하고 있음 - u-Transportation 연구과제는 V2X 통신방식을 활용한 다양한 서비스를 제공하려 는 것을 목적으로 하고 있으며 2010년 12월부터 시작되어 2012년 2월에 테스트 베드 구축사업이 종료되었으며 사업내용은 교통정보 수집/제공 장치 설계 및 구 축과 센터 시스템 설계 및 구축이며 국도 46호선의 연속류 도로 및 단속류, 비 신호 교차로를 이용하여 테스트베드를 구축하고 총 22개의 기지국과 50개의 차 량단말을 설치 및 운영하였음 ○ 국외 관련자들의 수행 내용 - 국외 자동차사 중심으로 ACC 시스템을 군집주행 서비스를 위한 기반 기술로 활 용을 위해 차량과 차량, 도로 연계 정보를 ACC와 융합하는 시스템 개발을 진행 하고 있으며 이에 대한 표준개발에 적극적으로 참여하고 있음- 유럽은 Chauffeur(1995~2004), SARTRE(2009~2012)와 독일의 KONVOI(2005~2009) 프로젝트에서 영상, 레이더, 라이다 등을 활용하여 차량의 종방향 제어를 통해 트럭의 군집주행을 실험하고 그 연비개선 효과를 분석함
- 유럽의 SPITS 프로젝트(2009~2011)에는 C-ITS 서비스를 위해 필요한 지능형 교 통 시스템 플랫폼을 개발하고 GCDC (Grand Cooperative Driving Challenge) Interaction protocol을 개발하고 GCDC 협력주행 경진대회에 참가하는 차량들에 게 배포하여 사용 가능한 수준에 가까운 군집주행 기술을 확보함
- 미국은 캘리포니아 PATH (Partners for Advanced Transportation Technology) 프로젝트(2000~2011)를 통해 차량의 센서를 통한 종방향/횡방향 제어기술을 활 용하여 노선버스의 정확한 정차를 위한 자동운전 기술과 에너지 효율 향상을 위 한 트럭 군집주행 기술을 확보함 - 미국의 구글 무인 자율주행 자동차는 2010년에 최초로 자율주행 자동차를 발표 하였고 2012년 미국 네바다 주와 캘리포니아 주에서 면허를 취득하고 실제 도로 에서 실증평가 및 개발을 수행중임
마. 국내외 경쟁기관 현황
- 국내외 대표적인 경쟁기관을 DSRC, Wi-Fi 및 WAVE 기술로 분류하여 아래와 같이 표로 정리하였으며 수십 미터 이내의 통신범위를 갖는 DSRC 기술을 제품으로 양 산하여 국내 고속도로 통행료 징수를 위한 하이패스 서비스에 활용되고 있음 - 기존 노매딕 환경의 무선통신 기술인 Wi-Fi 기술에 이동성을 추가하여 WAVE 기 술로 발전시켰으며 ITS 서비스를 위한 근거리 통신장치를 연구 개발하여 획기적 인 지능형 도로교통 시스템의 발전에 기여하고 있음 세부기술 업체명 보유 기술 또는 특허 DSRC 기술 AITS IR DSRC 기지국 및 단말 생산 LS 산전 삼성SNS DSRC 기지국 및 단말 생산 DB정보통신 ETC 통합차로제어기 삼성SDS IR DSRC 기지국 및 단말 생산 아이트로닉스 AITS ETC 단말기 및 기지국 생산 표 9. 차량통신 국내외 경쟁기관 현황바. 특허 동향
○ 관련 기술의 국가별 특허 분포 - 자동차와 관련된 센서융합, 협력주행 제어 기술 및 V2X 통신 관련 국가별 특허 분포는 아래의 그림과 같음 그림 13. 자동차/센서 관련 특허분포 Wi-Fi 기술 유브릿지 Atheros Wi-Fi 모듈 크리웨이브 Atheros Wi-Fi 모듈 JMP정보통신 Atheros Wi-Fi 모듈 WAVE 기술 코아벨ETRI, KETI IEEE802.11a 칩 기반 WAVE 모듈 ETRI, KETI IEEE802.11p 칩 솔루션 ETRI, KETI IEEE802.11p IP 솔루션
차량단말 기술 Kapsch ASD 단말기 개발 Savari MobiWAVE 단말기 개발 Cohda MK5-OBU 단말기 개발 Arada LocoMate 단말기 개발 Autotalk Pangaea4 단말기 개발
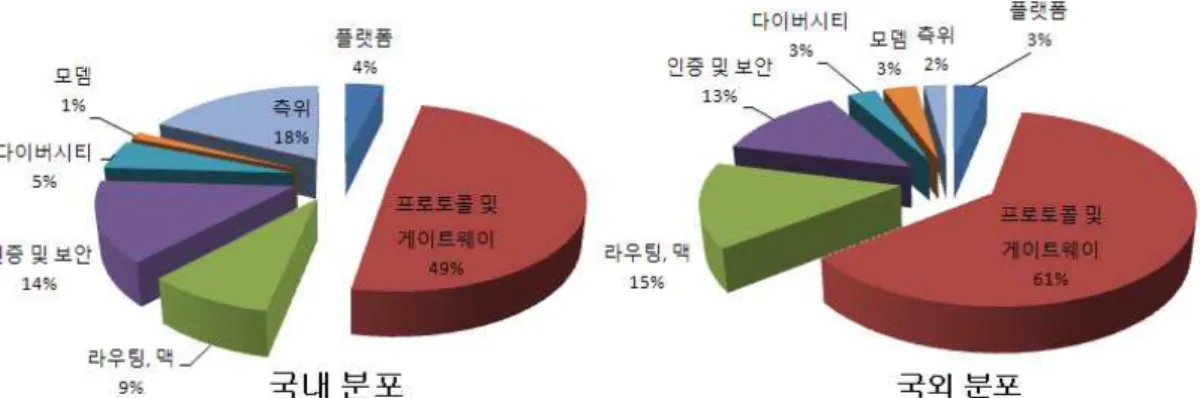
그림 14. 협력주행 제어기술 특허분포 그림 15. V2X 통신기술 특허 분포 - 센서 및 자동차와 관련된 특허는 미국이 약 60%를 차지하고 있으며 일본, 한국 및 유럽에서 각각 19%, 15% 및 6%를 차지하고 있음 - 협력주행 및 V2X 관련 특허의 대부분은 미국이 차지하고 있고 한국, 일본 및 유 럽이 특허의 나머지 부분을 거의 균등히 나누어 가지고 있음 ○ 국내․외 관련 기술의 특허 분포 - 자동차와 센서를 융합한 기술은 자동차관련 기술에서 널리 사용되고 있으나 센 서와 통신기술을 융합한 기술은 많이 고려되고 있지 않음 - 협력주행 제어기술과 관련된 특허는 주로 군집운행에 초점을 두고 있고 V2X를 이용한 기술은 주로 안전메세지/교통정보수집 등에 중점을 두고 있음 - 협력주행 및 V2X 통신에서 차량을 제어하는 기술은 부분적으로 적용되고 있으며 아래 그림은 차량통신 관련된 국내외 특허의 출원 분포를 나타낸 것임
그림 16. 차량 통신 기술의 국내외 특허 출원 분포 ○ 국내 특허 현황 - 국내에 출원된 특허의 경우, 현대자동차가 18건으로 가장 많은 출원을 보이고 있으며, 그 뒤를 이어 한국전자통신연구원, 엘지전자, 현대오토넷, 현대모비스, 삼성전자, 트라이콤텍 등의 출원 분포를 형성하고 있음 - 기술 분야별로 보면 차량 플랫폼 분야 3건, 프로토콜 및 게이트웨이 기술 분야 39건, 라우팅과 맥 기술 분야 7건, 정보 인증 및 보안 기술 분야 11건, 다이버 시티와 모뎀 기술 분야 4건, 측위 분야 14건이 출원된 것으로 나타남 - 플랫폼은 특허 출원이 가장 저조한 기술 분야로 국내보다는 해외의 기업이 국내 출원을 주도하고 있음 - 프로토콜 및 게이트웨이는 특허 출원이 가장 활발한 기술 분야로써, 기업과 학 교 그리고 연구 기관에 걸쳐 다양한 출원인 분포를 보임. 이 중 현대차와 현대 오토넷이 가장 많은 특허 출원을 보이고 있는데 대부분 차내망 및 차내망 연동 프로토콜 기술에 중점을 보인 반면 다음으로 많은 특허를 출원한 한국전자통신 연구원은 차내망과 차외망의 연동과 차량과 노변간 통신에 활용되는 게이트웨이 기술에 많은 비중을 두고 있음 - 라우팅, MAC 기술 분야는 한국전자통신연구원이 가장 많은 특허를 출원했고 기 업에서는 트라이콤텍이 고속 이동성을 고려한 기지국과 차량 탑재 장치에 관한 특허 등으로 두 번째로 많은 특허를 출원함 - 정보 보안 및 인증의 경우, 텔레매틱스 서비스와 연관하여 현대자동차와 엘지전 자에서 많은 특허를 출원함 - 차량통신 환경에서의 모뎀기술 및 다이버시티 분야는 많은 특허가 출원되지 않 음 ○ 국외 특허 현황 - 플랫폼 기술 분야는 전체적인 출원 건수가 다른 기술 분야에 비해 많지는 않음. 미국이 과반수 이상의 비율을 가지고 있고 최근 5년 동안 건수가 줄고 있지만 2003년 이후에 중국의 특허 건수가 늘어나는 것이 특이한 점임
- 프로토콜 및 게이트웨이 분야는 초반에 유럽에서 출원이 시작되었으나 1998년 이후부터 일본의 강세가 두드러짐. 일본의 특허건수는 꾸준한 추세를 보이고 있 고 미국의 경우 2003년을 기점으로 출원 건수가 줄고 있으나 반대로 한국과 중 국은 2003년도 이후부터 특허 출원이 꾸준하게 증가하는 경향을 보임 - 라우팅 및 MAC 분야에서는 미국이 절대적인 수적 우위를 보이고 있음. 최근 중 국의 약진도 눈에 띄며 일본은 1998년도 이후부터 그리고 한국은 2003년도를 기 점으로 특허 출원을 꾸준하게 하고 있음. 반면 초반에 출원 비율이 높았던 유럽 은 최근 추세가 주춤함 - 인증 및 보안 분야에서는 미국이 과반 수 이상의 비율을 가지고 있으며, 2004년 도에 유럽과 미국에서 특허 출원이 많음. 또한 2005년도를 기점으로 중국에서 특허 출원을 꾸준하게 하고 있는데 VANET 또는 MANET과 같은 통신 환경에서의 인증 및 보안 알고리즘이 아닌 텔레매틱스 서비스를 위한 인증 및 보안 방법에 대한 특허가 많이 출원됨 - 차량통신의 다이버시티와 모뎀기술에 대한 특허 건수는 국내와 마찬가지로 미미 함. 모뎀의 경우 차량통신 모뎀이 아닌 모뎀을 구성하는 세부기술 (OFDM, 변복 조 등)들에 대한 특허 출원이 주류이며, 다이버시티도 차량통신 분야가 아닌 이 동통신, 무선통신과 같은 큰 범주에서 많은 출원이 이루어짐 ○ 지재권 확보 가능성 - 전통적으로 라우팅, MAC 분야는 미국과 유럽이 원천 기술을 다수 확보하고 있 음. 차량제어를 위해서는 실시간성, 고속 이동성 및 신뢰성이 보장되어야 함으 로 V2X 디바이스 간 통신, 개인 무선기기들과의 다양한 데이터 교환을 제공하기 위한 새로운 형태의 라우팅과 MAC 기술이 필요하며 기존 통신망과 다른 특화된 특허 출원이 필요함 - 다이버시티/모뎀 기술은 차량통신관련 표준인 WAVE가 기존의 무선랜과 크게 다 르지 않은 기술을 사용하고 있기 때문에 지재권 수가 많지 않음. 그러나 차량 통신의 주파수 특성상 LOS가 보장되지 않으면 통신 성능이 급격히 저하되기 때 문에 음영 지역을 해소하거나 통신 커버리지를 확장시키고 고속이동에서도 안정 적인 통신 성능을 제공하기 위해서는 추가적인 기술 개발 및 특허확보가 필요함 - 차량에 필요한 정보를 제공하는 장치로서의 센서와 차량 간의 특허는 다양하게 분포하고 있음. 센서, 차량 간 통신 및 차량-기지국간 통신을 이용하여 현재 주 행 중인 차량의 정보를 이용할 뿐만 아니라 주변 환경정보를 고려하여 차량을 제어할 수 있는 기술에 대해서는 새로운 특허 확보가 가능할 것으로 판단됨
2. 핵심요소 및 접근방법
○ 차량환경에서의 광대역 V2X 통신 모뎀 기술 개발- 채널 대역폭 확장(10/20/40MHz) 또는 Channel Aggregation 방식을 적용하여 100Mbps 급 광대역 전송기술 연구
- High Order Modulation(64QAM) 에서의 채널 추정 및 성능 개선 연구 - 안테나 다이버시티를 적용한 PER 성능 개선 연구
○ 5msec Latency를 제공하는 광대역 V2X 통신 MAC 기술 개발
- 서비스 종류(차량 제어, 안전 경고 등) 및 서비스 Priority 에 따른 채널 할당 알고리즘을 연구 및 시뮬레이션을 통한 검증 - 사용자 수가 증가함에 따른 채널 모니터링 및 Congestion Control 알고리즘 연 구 및 시뮬레이션을 통한 검증 ○ 차량 환경에서의 광대역 무선전송 기술 개발 - 제안된 V2X 통신 모뎀과 MAC 기술의 기능 및 성능을 평가하기 위하여 무선 전송 모듈을 구현하여 시험을 통하여 검증함 - 광대역 V2X 통신 모뎀은 5.9GHz 주파수 대역에서 동작하며 기존의 WAVE 통신 규 격과도 호환성을 제공하도록 개발함 - 광대역 V2X 통신 모듈 시험은 다경로 페이딩 채널 시뮬레이터를 이용하여 실내 시험환경을 구축하여 성능을 평가
제 2 장 당해년도 실적
제 1 절 연구개발 목표 및 추진체계(총년도)
1. 목표
고속으로 이동하는 차량 환경에서 차량주변의 위험 상황 정보와 차량 제어 정 보를 전달하기 위하여 100 Mbps급 무선전송과 5msec급 Latency를 갖는 무선전송 기술을 개발 ○ 100Mbps급 PER=0.01%를 만족하는 V-Link 통신 모뎀 기술 ○ 5msec급 Low Latency를 제공하는 광대역 V-Link 통신 MAC 기술 ○ V-Link 무선 전송 기술 표준화 ○ V-Link 통신 기술 적용을 위한 서비스 및 단말 기술 성과지표 (주요성능 Spec) 단위 세계최 고수준 기술개발 목표치 목표치 산출근거 검증방법 비고 (2018) ① 최대 데이터 전송속도 Mbps 54 108 주1) 에뮬레이션 108 ② 이동성 km/ h 200 400 최대400 에뮬레이션 400 ③ PER % 10 1 주2) 에뮬레이션 0.01 ④ Latency ms 100 10 주3) 시뮬레이션 5 표 10. 기술개발 성과지표 (총사업연도/2017년도) 주1: 정지 시에 최대 108Mbps 이상, 400 Km/h 에서는 단일 채널 동작에서 최대 72Mbps(18Mbps x 4 채널)을 제공하며 Dual 채널 동작 시 90Mbps(5 채널) 까지 제공 주2: PER = 0.01 은 MAC 레벨에서 200 바이트 이내의 차량 제어용 패킷을 6Mbps로 전송하 고 수신할 때의 패킷 수신 에러율임 (단, 주행속도는 100km/h) 주3: 패킷을 송신하였을 때 MAC 레벨에서의 end-to-end 시간 지연을 의미함 구 분 목 표 내 용 1차년도 (2016) ○ 차량 환경에서의 광대 역 무선전송 규격 개발 및 표준화 기반 조성 - 100Mbps급 PER=0.01%를 만족하는 V-link 무선전 송 규격 개발- 5msec급 Low Latency를 제공하는 V-link MAC 규격 개발
- 표준화 항목 도출 및 국내외 표준화 기반 조성 표 11. 연도별 개발 목표
그림 17. 연도별 주요연구 내용 ○ V-Link 서비스를 위한 메시지 규격 및 단말 설계 - 자율주행 서비스에 필요한 V-Link 통신 요구사항 정의 - WAVE와의 호환성을 위한 V-Link 단말 설계 - 차량 내부망(CAN)연계 V-Link 응용 메시지 규격 설 계 2차년도 (2017) ○ 차량 환경에서의 광대 역 무선전송 기술 구현 및 표준화 ○ V-Link 서비스를 위한 통신 프로토콜 구현 - 100Mbps급 PER=1%를 만족하는 V-link 무선전송 모뎀 구현
- 10msec급 Low Latency를 제공하는 V-link MAC 기술 구현 - 100Mbps급 V-link 무선전송 기술 표준 제안 - V-Link 모뎀/MAC 검증용 하드웨어 구현 - V-Link 서비스를 위한 통신 소프트웨어 및 응용 서 비스 구현 3차년도 (2018) ○ 차량 환경에서의 광대 역 무선전송 기술 검증 및 표준화 ○ V-Link 서비스를 위한 프로토콜 구현 - 100Mbps급 PER=0.01%를 만족하는 V-link 무선전 송 모뎀 구현 및 검증
- 5msec급 Low Latency를 제공하는 V-link MAC 기술 구현 및 검증
- 100Mbps급 V-link 무선전송 기술 표준화
- IEEE 1609 2016. ver. 구현 - 검증 절차 수립 및 검증 수행
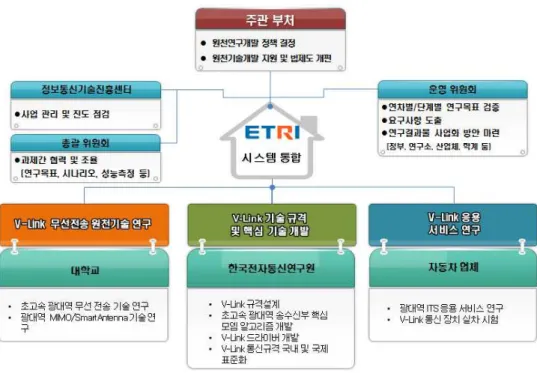
2. 추진체계
○ V-Link 광대역 무선전송 핵심원천 기술연구는 대학과의 협력하여 추진 ○ V-Link 통신기술을 이용한 서비스 연구를 자동차업체와 협력하여 추진 ○ ETRI는 V-Link 통신기술 규격 개발 및 검증, 그리고 표준화를 중점적으로 추진 ○ V-Link 통신 규격은 국내 표준화와 국제 표준화를 동시에 추진함 그림 18. 연구개발 추진 체계도3. 연구개발 방법
○ V-Link 광대역 무선전송 핵심원천 기술은 대학과의 협력으로 추진 - 고속 무선전송을 위한 광대역 전송 및 채널 Aggregation 통신 방식 연구 - PER=0.01%를 만족하기 위한 안테나 다이버시티 및 채널 이중화 방식 연구 - NLOS 무선채널환경에서의 무선 네트워킹 방식 연구 ○ V-Link 통신기술을 이용한 서비스 연구를 자동차업체와 협력하여 추진 - 자율주행서비스에 필요한 V2X 통신 요구사항 발굴 및 규격에 반영 - 차량에 V2X 통신 기술 적용에 따른 서비스 모델 제시○ 차량환경에서의 광대역 V2X 통신 모뎀 기술 개발
- 채널 대역폭 확장(10/20/40MHz) 또는 Channel Aggregation 방식을 적용하여 100Mbps급 광대역 전송기술 연구
- High Order Modulation(64QAM) 에서의 채널 추정 및 성능 개선 연구 - 안테나 다이버시티/스마트 안테나를 적용한 PER 성능 개선 연구
○ 5msec Latency를 제공하는 광대역 V-link 통신 MAC 기술 개발
- 서비스 종류(차량 제어, 안전 경고 등) 및 서비스 Priority 에 따른 채널 할당 알고리즘을 연구 및 시뮬레이션을 통한 검증 - 사용자 수가 증가함에 따른 채널 모니터링 및 Congestion Control 알고리즘 연 구 및 시뮬레이션을 통한 검증 ○ 고속 V-Link 통신 기술 국내외 표준화 추진 - 국내 TTA에 고속 V-Link 무선전송 기술 표준화 제안 - 국제 표준화 기구(3GPP)의 V2X 표준화 동향 분석 및 표준 기고 그림 19. 표준화 추진 전략
제 2 절 당해년도 연구 목표
1. 연구개발 목표
○ 자율주행 자동차의 광대역 무선전송 알고리즘 개발 및 소프트웨어 구현
- PER 성능 개선을 위한 V-Link 무선전송 알고리즘 개발 및 에뮬레이터 구현 - 저 지연 V-Link MAC 알고리즘 개발 및 소프트웨어 구현 - 100Mbps급 V-Link 무선전송 기술 표준화○ V-Link 서비스를 위한 단말 구현
- V-Link 서비스를 위한 통신 소프트웨어 구현2. 연구개발 내용
○ PER 성능 개선을 위한 V-Link 무선전송 알고리즘 개발 및 에뮬레이터 구현 - 고속이동(400km/h)의 V2X 통신 채널환경에서 채널추정 오류를 최소화하고 PER 1% 이내의 성능을 만족할 수 있는 무선 동기 알고리즘 설계 및 구현 - 서비스 데이터의 대용량 무선전송을 위한 채널상태 모니터링을 통한 동적 대역 폭 가변 알고리즘 설계 및 채널상태 모니터링 알고리즘 구현 - 개발 플랫폼 보드를 사용한 에뮬레이터 구현 및 알고리즘 검증 ○ 저 지연 V-Link MAC 알고리즘 개발 및 소프트웨어 구현 - 차량들이 자발적으로 무선채널 자원을 할당하여 차량간 통신 네트워크를 구성하 는 분산형 네트워크 자원할당 기술 및 200대의 차량이 10ms latency를 보장하 고 채널 과부하 조건에서 차량 간 간섭을 최소화 할 수 있는 다중접속 저지연 저간섭 MAC scheduling 기술 개발 및 설계 - 리눅스 기반 임베디드 플랫폼에서 상위계층과 하위계층에 대한 인터페이스를 지 원하는 MAC 드라이버 기능, 저지연 패킷 송수신을 위한 MAC 스케줄링, 모뎀의 송신 설정을 제어할 수 있는 기능을 가진 V-Link MAC 소프트웨어 구현 ○ 100Mbps급 V-link 무선전송 기술 표준화 - 국내 TTA PG905에 고속 V-Link 무선전송 기술 표준화 기고 § V-Link 통신 시스템 구조 표준 § V-link 통신 물리계층 표준- 국제 표준화 기구(3GPP SA1)에 V-Link 표준화 기고서 발표 § LTE V2X 시스템 구조 연구
§ LTE V2X와 WAVE 연동 표준
○ V-Link 서비스를 위한 단말 구현
- V-Link 서비스를 위한 통신 소프트웨어 구현
§ Zync 플랫폼에 embedded linux OS를 포팅하고 주변 기능(peripheral) 들을 제어하기 위한 기본적인 device driver 개발 § 기존 연구를 통해 개발한 IEEE 802.11 및 IEEE 1609 기반의 통신 S/W를 Zync 플랫폼에서 동작 가능하도록 이식하고 이를 기존 802.11 기반의 NXP Roadlink EVK를 이용하여 송수신 기능 검증 § V-Link 응용 서비스를 위한 WAVE 통신 스택 기능 보완
제 3 절 당해연도 추진체계
○ ETRI는 V-Link 무선정송 모뎀 및 MAC 기술 구현 및 표준화를 중점적으로 추진 ○ V-Link 광대역 무선전송 핵심원천 기술연구는 대학과 협력하여 추진
○ V-Link 통신 규격의 국내 표준화 및 국제 표준화를 동시에 추진함 ○ 공동연구기관에서는 V-Link 통신기술을 이용한 서비스 구현 추진
제 4 절 당해연도 추진일정
과제내용 추 진 일 정 활동 책임 자 연구개발 비 (천원) 참여인 력 (M/Y) 1 2 3 4 5 6 7 8 9 10 11 12 PER 성능 개선을 위한 V-Link 무선전송 알고리즘 개발 및 에뮬레이터 구현 - 모뎀 알고리즘 설계 - 모뎀 알고리즘 구현 - 에뮬레이터 구현 - 모뎀 알고리즘 성능 검 증 강도욱 260,000 1.5 M/Y 저 지연 V-Link MAC 알 고리즘 개발 및 소프트웨 어 구현 - 분산형 네트워크 자원 할당기술 개발 - 저지연 저간섭 MAC 기 술 개발 - V-Link MAC 단위 시험 송유승 371,000 2.5 M/Y 고속 V-Link 국내외 표준 화 활동 - 국내 TTA 표준화 - 국제 표준화 오현서 150,000 1.2 M/Y V-Link 서비스를 위한 단 말 구현 - OS 포팅 및 device driver 개발 - 통신 S/W개발 및 응용 프로그램 개발 유정욱 53,334 0.3 M/Y주요 Milestone 완성 시점에서의 수행결과 ¡ V-Link 모뎀 알 고리즘 설계서 ¡ V-Link MAC 기 술 설계서 ¡ V-Link 모뎀 SW ¡ V-Link MAC SW ¡ V-Link 통신 SW ¡ 시험절차 및 결 과서 ¡ 기고서 ¡ 논문 및 특허 834,334 5.5 M/Y
제 5 절 연구수행 내용 및 결과
1. PER 성능 개선을 위한 V-Link 무선전송 알고리즘 개발 및 에뮬레
이터 구현
가. 채널 추정 알고리즘 설계
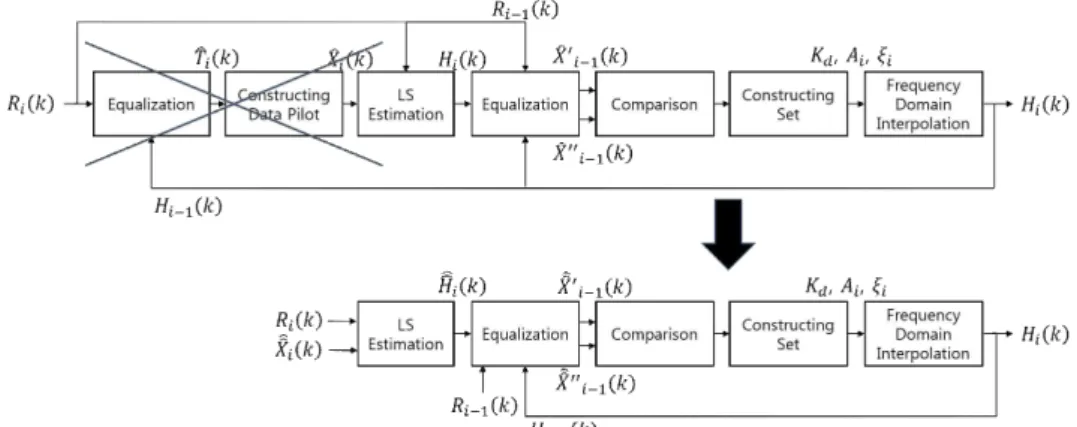
1) Decoded Data기반 반복적 채널추정 기법 제안하는 decoded data 기반의 반복적 채널 추정 기법은 그림19와 같이 기존 채널 추정 기법(LS, STA, CDP, TRFI)으로 얻은 채널값을 이용하여 등화, 복조, 역인터리빙 취한 후 Viterbi Decoder에서 결정된 Decoded Data 를 이용하여 WAVE 통신 시스템 송신기 구조의 컨벌루션 코드 단계부터 파일럿 삽입 단계까지 동일한 과정을 수행하여 새로운 데이터 파일럿 을 구성한다. 그러므로 수신 심볼에 대해 최종적으로 Decoding한 정보가 존재해야 제안기법을 사용할 수 있다. 이는 기존 채널 추정 기법의 조합을 통해 반복적으로 수행 가능하며, hard value인 information bit를 이용하므로 soft value의 LLR값을 이용하는 기존 ICED 기법 대비 복잡도를 낮출 수 있으며 우수한 성능을 보장한다.
그림 21. Decoded data 기반 반복적 채널 추정 기법
그림 22. TRFIw/VDA 채널 추정기 구조 그림 20는 TRFIw/VDA 채널 추정기 구조이다. TRFI 기법은 지속적으로 채널 추 정 값을 업데이트하는 데이터 파일럿 기반의 채널 추정 기법으로서 채널 추정 값 을 업데이트할 때 평균화 과정 대신 주파수 보간법을 사용하여 디매핑 오차를 완 화한다. TRFI 기법은 시간 영역과 주파수 영역에서 각각 인접한 두 개의 데이터 심볼 간 채널 상관 값은 굉장히 높다는 가정 하에 동작한다. TRFIw/VDA 기법은 디 코더 결과인 information bit를 통해 변조하여 얻은 변조 심볼 로 데이터 파 일럿 심볼의 신뢰성을 높인다. ① 4개의 파일럿 심볼은 수신 단에서 사전에 알고 있으며, 이 파일럿 심볼의 인덱스는 집합 에 포함된다. ② 집합 에 포함되는 모든 원소 에 대해서 시간 영역 신뢰성 테스트 ′ ″ 를 진행한다. - 같으면, 이고, 이때의 부반송파 인덱스 는 집합 에 포함된 다. - 다르면, 부반송파 인덱스 는 집합 에 포함된다. ③ 집합 에 포함되는 에 대해서는, 집합 에 속한 부반송파의 채널 추정 값을 주파수 영역에서 보간하여 를 추정한다. 여기서 는 각각 번째 심볼에서 데이터 부반송파 인덱스 집합, 신뢰 성 있는 채널 추정 값의 부반송파 인덱스 집합, 신뢰성 없는 채널 추정 값의 부반 송파 인덱스 집합을 나타낸다. 이 과정은 모든 데이터 심볼에 대해 수행하고 는 데이터 부반송파에서 파일럿 부반송파 4개를 포함한 52개의 부반송파에 대해 수행 한다.