† 교신저자, 한국00기술연구원, 철도물류 E-mail : ******@railway.or.kr * 한국00대학교, 철도학과 ** 한국00기술연구원, 철도물류
자기부상열차의 주행안정성 해석에 의한 횡 댐퍼 파라미터 연구
A Parameter Study of Lateral Damper on Hunting Stability of Maglev
Vehicle
한종부† 김기정* 김창현* 한형석*
Jong-Boo Han Ki-Jung Kim Chang-Hyun Kim Hyung-Suk Han
ABSTRACT
In the area of wheel on rail vehicle, hunting stability which is generated by lateral motion is one of important characteristics for running safety. It might cause not only oscillation of vehicle but also derailment in an unstable area of the high speed. A Maglev vehicle is usually controlled the voltage to maintain the air gap between electromagnet and track. However, in Maglev system, an occurrence possibility of hunting motion could be high, because Maglev vehicle is not controlled directly lateral force between electromagnet and track in the curved guideway. In this paper, running safety is evaluated when Maglev vehicle run on guideway at high speed according to installment of damper between maglev vehicles and bogies, and to analyze the effect of it. Also, the parametric study is carried out for selecting effective lateral damper properties through the simulation. To accurately predict the running safety, 3d multibody dynamics models which are included air spring, guideway conditions and irregularities profile are used. With the results acquired, suggestions were made whether to adopt the damper and how to optimize the damping characteristics.
1. 서론 일반적으로 철도차량이 주행할 때 중요한 특성 중에 하나는 횡방향 운동으로 인해 발생하는 사행동 (hunting motion)이다. 이러한 사행동은 차량의 불안정한 속도범위에서 과도한 진동을 유발시키고 탈선 과 같은 치명적인 결과까지 야기될 수 있다. 자기부상열차는 일반적으로 가이드레일과 전자석간의 일정 크기의 부상 공극을 유지하도록 전압을 제어한다. 그러나 곡선 주행시 안내력을 직접적으로 제어하지 않기 때문에 고속에서 사행동이 발생할 가능성이 크다. 이에 본 논문에서는 고속의 곡선 주행 시 자기 부상열차의 주행안정성을 예측하고, 이러한 사행동을 줄이기 위한 방법으로 차량과 대차 사이의 횡 댐 퍼 설치를 제안하였다. 횡 댐퍼의 물성치는 동역학 시뮬레이션을 통하여 파라미터 연구를 하였다. 엄밀 한 주행안정성 예측을 위하여 전자석의 부상제어가 포함된 자기부상열차의 다물체 동역학 모델을 사용 하였다. 또한 자기부상열차의 주행안정성은 부상 제어, 2차 현가장치인 공기스프링의 강성 및 감쇠 특 성, 선로 조건 그리고 레일의 불규칙도(roughness profile)등이 영향을 미치므로 위의 인자들이 제안된 동역학 모델에 적용하였다. 따라서 자기부상열차의 보다 신뢰성 있는 안정성 예측이 가능할 것으로 예 상된다. 2. 모델링 2.1 차량 차량은 그림 1에서 보듯이 2량 1편성이며 1량당 4대차 구조로 운행된다. 각 대차는 그림 2와 같은
구조로 좌우 2개의 슬라이딩 테이블이 지탱하고 있다. 각 대차는 왼쪽 오른쪽 두 모듈로 구성되어 있으 며 각 모듈당 8개의 전자석, 전후 2개의 안티롤빔, 좌우 4개의 공기 스프링, 좌우 2개의 견인바 그리고 견인바 속에는 고무가 내재되어 있다. 안티롤빔과 모듈은 회전조인트로 연결된다. 이러한 대차는 Fig 3 에서와 같이 Virtual.lab Motion에 의하여 상세하게 모델링 된다. 그림 2. 대차 모듈 구조 그림 3. 전체 차량 다물체 동역학 모델 2.2 전자석 그림 4에서와 같은 전자석에서 전자석에 의한 부상력 F i c0( , )는 일반적으로 비선형( , )i co 0 함수이나 평형 점 즉 공칭 점 에서의 선형화된 모델이 자주 이용된다. 평형 위치에서의 선형화에 따른 부상력과 전류의 변화량은 식(1), 식(2)와 같이 정 의된다. 0
( ( ), ( ))
c( )
i( )
staticF c t
∆
∆
i t
= ∆
k c t k i t
− ∆
+
F
(1) 0 01
( )
c( )
( )
( )
ik
R
i t
c t
i t
v t
k
L
L
∆
&
= ∆
&
−
∆
+
∆
(2) 여기서, 2 0 0 0 2 N A L c µ = , 2 0 0 2 0 2 i N Ai k c µ = , 2 2 0 0 3 0 2 c N Ai k c µ = , staticF : Static force (N), F0: Idle levitation force (N),A: Section area of magnet (m2), 0
µ : Permeability factor,N: Number of turn of magnet coil (turn), i0 : Nominal current (A), 0
c : Nominal air gap (m), c : Air gap (m), v : Voltage (V), R: Resistance (Ω ).
그림 5에서 보는 바와 같이 전자석의 횡 변위가 d t ≠( ) 0일 때의 부상력 및 안내력은 식(3), 식(4)와 같이 정의 된다. 1 0
1
2 ( ) 2 ( )
tan
( )
( )
z m mc t
d t
c t
F
F
d t
πω
πω
−⎡
⎛
⎞
⎤
= × +
⎢
+
⎜
⎟
⎥
⎝
⎠
⎣
⎦
(3) 1 02 ( )
( )
=
tan
( )
y mc t
d t
F
F
c t
πω
−⎛
⎛
⎞
⎞
× −
⎜
⎜
⎟
⎟
⎝
⎠
⎝
⎠
(4) 여기서, yF : Guidance force (N), Fz: Levitation force (N), d : Lateral air gap (m),
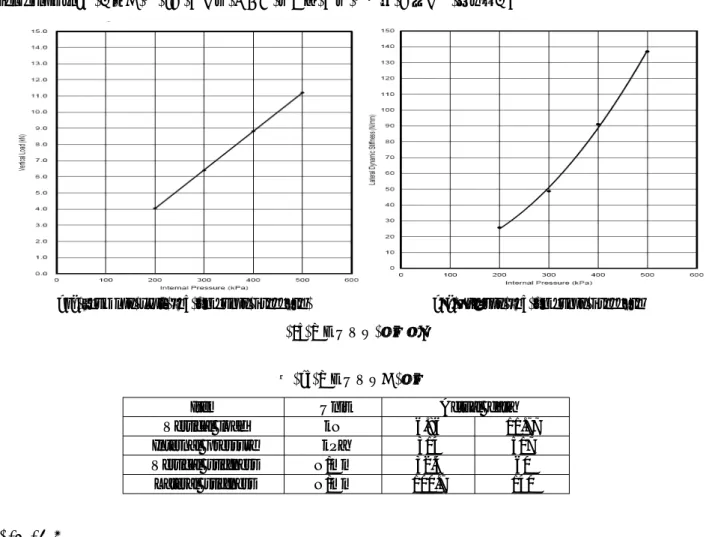
2.3 2차 현가 장치 차체와 대차 사이를 연결하는 공기스프링은 동적 거동 및 승차감 향상을 시키는 기능을 한다. 공기스프링이 수직과 수평 두 방향으로 작용하기 때문에 차량의 수직 병진 운동과 피칭(pitching) 모션이 가능하게 해주며 또한 횡, 롤링(rolling) 그 리고 요(yaw) 운동에 제한을 준다. 공기스프링의 주 파라미터는 강성(stiffness)이며 그 강성은 스프링과 보조저장장치의 공기의 압축과 효율적인 면적의 변화 및 오리피스(orifice) 형상에 따른 댐핑 계수로부터 조절 될 수 있다. 복잡한 공기스프 링은 질량과 스피링 그리고 댐퍼와 같은 수학적 모델로 설명되어 진다. 자기부상열차에 적용된 공기스프링의 스펙 (specification)은 다음의 표 1과 같으며 동역학 해석을 위해 간단히 부싱으로 처리했다.
(a) Vertical load vs. Internal pressure (b) Lateral vs. Internal pressure 그림 4. 공기스프링 특성곡선
표 1. 공기스프링의 특성
Item Unit Actual data
Vertical load kN 6.86 11.77
Internal pressure kPa 314 517
Vertical stiffness N/mm 32.4 60 Lateral stiffness N/mm 100.7 140 2.3 횡 댐퍼 횡 댐퍼는 대차와 차량 간의 횡방향의 진동과 대차, 차량의 yawing 운동을 감쇠시키는 역할로 적절한 댐퍼설계가 필요하 다. 댐퍼의 설계 위치는 그림 5와 같이 대차의 양 끝에 위치한 공기스프링에 설계하였으며, 각 대차 당 2개의 댐퍼가 설치되 는 구조이다. 초기 설계 단계에서 댐퍼 계수를 결정하기 위하여 공기스프링의 횡 방향 강성 값을 이용하여 식 (5)와 같은 자 기부상열차의 yawing 움직임에 대한 동역학 식을 정의 하였다. 2
(
)
zz yaw air spring yaw
I
θ
&&
= −
∑
K
l
θ
(5)정의된 식 (5)을 이용하여 대차의 고유진동수(
ω
n)를 구하고, 식 (6)을 이용하여 임계감쇠 댐퍼계수를 계산하였다. 감쇠 비(ξ
)에 따른 댐퍼계수를 20, 20, 40% 효과를 표 2와 같은 3가지의 댐퍼계수를 설정하였다.2
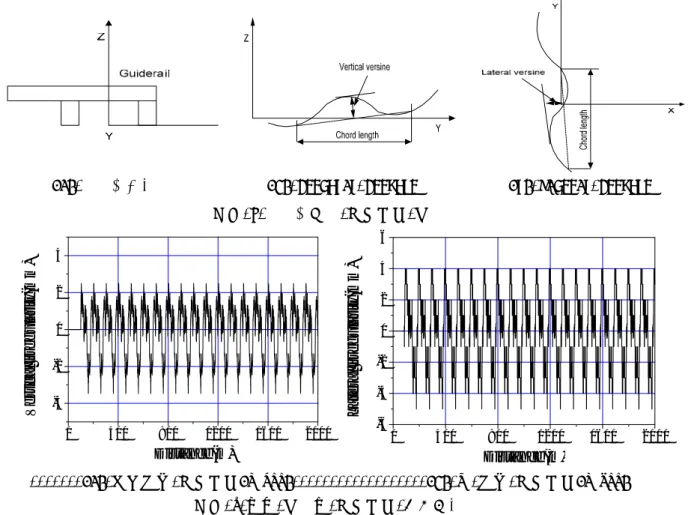
C nGuiderail Brake shoe Electromagnet Air spring Damper Bogie Car 그림 5. 자기부상열차 서스펜션 구조 표 2. 시뮬레이션에 반영된 댐퍼계수 값 Damping coefficient(kg/s) Neutral Frequency 48000 case1(20%) 9600 case2(30%) 14400 case3(40%) 19200 2.4 레일 자기부상열차의 직선 및 곡선 주행 동특성을 예측하기 위해서 외란효과가 필요하다. 본 논문에서 고려된 외란은 가이드웨 이 처짐 한계, 가이드레일 처짐 한계, 가이드웨이 표면조도 3가지이다. 그림 6은 차량이 주행하서 차량의 정•동적 하중에 의 하여 발생하는 가이드웨이는 변형을 나타낸다. 가이드웨이는 35m 구간에 대해 고려했으며, 이것은 인천공항 시범노선에 적 용될 것과 같다. 50 55 60 65 70 75 80 85 -12 -10 -8 -6 -4 -2 0 G u ide way de flection (m m) Distance(m) 그림 6. 가이드웨이 처짐 그림 7은 가이드레일은 침목에 의하여 지지되는데 차량 주행 중 침목과 침목 사이에서 가이드레일은 처짐이 발생한다. 그 림 7 (a)에서는 침목간 거리가 1.25 m 일 때의 처짐 형상을 보여주고 있다. 100 102 104 106 108 110 -1.0 -0.8 -0.6 -0.4 -0.2 0.0 G u id era il de flectio n(m m) Distance(m) (a) 가이드레일 (b) 가이드레일 처짐 한계 프로파일 그림 7. 가이드레일 처짐 전자석과 대응하는 가이드레일 표면 조도는 그림 8에서와 같이 허용 가능한 Versine으로 제한할 수 있다. 허용 가능한
덤 불규칙 형상 보여주고 있다. 생성된 프로파일은 수직방향은 절대값 ±3mm 사이값을 보이며, 횡 방향으로는 ±5mm 사이값 으로 생성하였다. 열차의 사행동을 유도하기 위하여 횡 방향으로 악조건으로 설정하였다.
(a) 가이드레일 (b) Vertical Versine (c) Lateral Versine
그림 8 가이드웨이 표면조도 생성 0 400 800 1200 1600 2000 -4 -2 0 2 4 V ert ical irregu larity (mm) Distance(m) 0 400 800 1200 1600 2000 -6 -4 -2 0 2 4 6 Lat er al ir regul ar ity( m m ) Distance(m) (a) 수직방향 표면조도(±3mm) (b) 횡 방향 표면조도(±5mm) 그림 9 랜덤 생성된 표면조도 프로파일 3. 시뮬레이션 표2에서 설정한 댐퍼 계수를 이용하여 대차와 차량 간의 댐퍼를 연결하였다. 연결 위치는 각 대차의 중심과 차량과 연결하 였고 비틀림각은 0으로 설정하였다. 사행동을 발생시키기 위하여 2절에서 설명한 바와 같이 외란을 인가하였고, 곡선을 주행 했을 때 발생되는 횡 방향 가속도, yawing 가속도, 횡공극을 측정하였다. 이때 자기부상열차의 속력은 110km/h으로 최대 설 계속도로 주행하였고, 곡선 반경 800m과 레일 비틀림각 3.4°로 설정하였다. 그림 10는 곡선주행 시뮬레이션의 첫 번째 대차 에 대한 결과 그래프 이다. 그림 10의 (a)는 댐퍼유무와 댐퍼계수에 따른 횡 방향 가속도를 측정하였다. 횡 댐퍼의 유무에 따라 약 20%정도의 가속도 값이 줄어드는 것을 확인하였고, 댐퍼 계수가 커질수록 횡 방향 가속도는 줄어든다. 그림 (b)의 대차의 yawing 가속도는 약 20% 정도 줄어들었고, 댐퍼 계수가 커질수록 그 효과가 더 컸다. 마찬가지로 그림 9 (c)의 횡공극 은 댐퍼가 있을 때 약 10%정도 줄어들었다. 하지만 댐퍼의 계수가 클수록 횡 공극이 큰 경향을 나타내었다. 댐퍼로 인해 질량 이 큰 차체에 비하여 대차의 횡 방향 가속도와 yawing 가속도가 줄어들지만 그로인해 횡 공극이 크게 나타나는 것으로 판단 된다. 또한 댐퍼 계수를 더 높일 경우 횡가속도와 yawing 가속도를 크게 줄어들지만 횡 공극이 설계기준 (±12mm)을 만족하 지 않았다.
2 3 4 5 6 7 8 -1 0 1 2 3 Lat er al ac ce ler at ion( m /s 2 ) Time(sec) w/o damper C=9600 C=14400 C=19200 2 3 4 5 6 7 8 -2 -1 0 1 2 A ngul ar ac c el er at ion( rad/ s 2 ) Time(sec) w/o damper C=9600 C=14400 C=19200 2 3 4 5 6 7 8 9 10 -2 0 2 4 6 8 10 12 Lat er al ai r gap( m ) Time(sec) w/o damper C=9600 C=14400 C=19200 (a) 횡가속도 (b) Yaw 가속도 (c) 횡 공극 그림 9 시뮬레이션 결과 4.결과 본 논문에서는 자기부상열차의 고속주행 시 외란의 영향으로 인해 발생될 수 있는 사행동을 방지하고자 횡 댐퍼 설계를 제안하였다. 횡 댐퍼는 기존의 자기부상열차 시범운행을 통해 얻어진 공기스프링에 대한 대차의 공진주파수를 사용하여 임 계감쇠 영역에서의 감쇠비를 조절하여 3가지의 경우를 생성하였다. 시뮬레이션에 의한 자기부상열차 동특성 해석을 위하여 가이드웨이의 불규칙도를 악조건으로 설정하였고, 설계최고 속도인 110km/h, 곡선반경 800m로 설정하여 곡선 주행 시뮬레이 션 수행하였다. 해석결과 댐퍼가 설치될 경우 대차의 횡 가속도, yawing 가속도, 횡공극을 각각 약 20, 20 10% 정도 감소되는 경향을 확인하였다. 또한 댐퍼 계수가 커질수록 횡공극이 크게 발생하는 것으로 횡 댐퍼의 설계 시 승차감과, 곡선추종성을 적절히 만족할 수 있는 효율적인 댐퍼 계수의 필요성을 확인하였다. 결과적으로 본 논문의 시뮬레이션 결과를 통하여 자기부 상열차 또한 일반 고속열차와 같은 횡 댐퍼의 역할이 크게 작용할 수 있을 것으로 판단된다. 추후 최적화 이론을 통해서 댐퍼 상수의 최적설계를 수행할 계획이다. 참고문헌
1. Bong Hyuk Yim Hyung Suk Han and Sun-Soo Kim, "Curving performance simulation of an EMS-type Maglev vehicle," Vehicle System Dynamics, Vol. 47, No. 10, pp. 1287~1304, 2009.
2. J. S. Lee, D. J. Lim and M. Y. Kim, "Moving urban Maglev-vehicle analysis considering non- linear magnetic levitational force effect," COSEIK, 2009.
3. E. Coenraad, "Modern railway track secondedition," C. Esveld, Netherlands, 2001.
4. A. A. Shabana, "Railroadvehicledynamics:Acomputationalapproach," Taylor&Francis Group, USA, 2007. 5. B. H. Yim and H. S. Han, Curve negotiation analysis of a Maglev vehicle utilizing electromagnetic
suspension system," Asian Conference on Multibody Dynamics, 2008.
6. P. K. Sinha, "Electromagnetic suspension dynamics&control," Peter Peregrinus Ltd, London, United Kingdom, 1987.
7. H. S. Han, "A study on the dynamic modeling of a magnetic levitation vehicle," JSME International, Vol. 46, No. 4, pp. 1497~1501, 2003.