碩 士 學 位 論 文
신경망을 이용한 현가 시스템의 모델링 및 고장 진단
Modeling and fault diagnosis of suspension system using neural network
國 民 大 學 校 自 動 車 工 學 專 門 大 學 院 전 자 제 어 시스템 專攻
李 廷 鎬
2001
신경망을 이용한 현가 시스템의 모델링 및 고장 진단
지 도 교수 박 기 홍
이 논문을 석 사 학 위 청구 논문으로 제출함
2001 년 12 월 일
국 민 대 학 교 자 동 차 공 학 전 문 대 학 원 전 자 제 어 시스템 전공
이 정 호
2001
이 정 호 의
석사학위 청구 논문을 인준함.
2001 년 1 월 3 일
심 사 위 원 장 김 찬 묵 인 심 사 위 원 허 승 진 인 심 사 위 원 박 기 홍 인
국 민 대 학 교 자 동 차 공 학 전 문 대 학 원
목 차
국 문 요 약 --- ⅲ
LIST OF FIGURES --- ⅳ
1. 서론 --- 1
2. 신경망 --- 3
2.1 다층 신 경 망 --- 3
2.2 오류 역 전 파 알 고 리 즘 --- 6
3. 모델링 --- 10
3.1 EDM(Empirical Dynamics Modeling) --- 11
3.2 뎀퍼 모 델 링 --- 15
3.3 타이어 모 델 링 --- 21
4. 고장 발견 및 진단 --- 24
4.1 고장 발견 및 진 단 의 기 본 고 안--- 24
4.2 고장 발견 및 진 단 알고리즘 --- 26
4.3 실험 장치 --- 28
4.4 고장 진단 알 고 리 즘 의 검 증 --- 29
5. 결론 --- 35
참 고 문 헌 --- 36
Abstract --- 38
국 문 요 약
현가장치중 댐퍼와 타이어는 차량의 주행안정성에 큰 영향을 미치는 부품이다. 따라서 본 연구에서는 일반 도로주행상황에서 댐퍼와 타이어의 상태를 파악하여 고장이 발생한 경우 정확히 진단하여 운전자에게 알리고자 하는 목적을 가지고 댐퍼와 타이어의 고장상황시 일어나는 현상에 대해서 조사한 후 고장진단 알고리즘을 개발하였다 . 이 과정에서 기존의 모델링 기법과는 달리 신경망 이론을 적용하여 댐퍼와 타이어의 모델링을 수행하였으며, 댐퍼의 감쇠력과 동적타이어힘의 주파수특성변화를 이용하여 고장진단을 하였다.
이러한 방법을 이용하여 효과적으로 댐퍼와 타이어의 고장진단을 할 수 있음을 알 수 있었다.
List of Figures
Figure 2-1 General multilayer neural network[11]
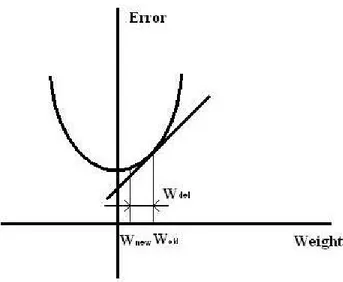
Figure 2-2 Concept of the weight training
Figure 2-3 Flow of error in back-propagation algorithm[11]
Figure 2-4 Back-propagation training algorithm[11]
Figure 3-1 Tapped delay neural network structure for EDM Figure 3-2 Training error vs. Prediction error
Figure 3-3 Multiple fittings
Figure 3-5 Polynomial damper model
Figure 3-6 Dynamic characteristics of variable damper Figure 3-7 Neural network model
Figure 3-8 Damper test equipment
Figure 3-9 Force-Velocity diagram of the damper
Figure 3-10 Comparison of measured force and neural network model
Figure 3-11 Error between measured and neural network model Figure 3-12 Quarter car model
Figure 3-13 Comparison of measured force and neural network model
Figure 3-14 Error between measured and neural network model
Figure 4-1 Effect of variation of damping coefficient via ¼ car Simulation
Figure 4-2 Effect of variation of tire stiffness via ¼ car simulation Figure 4-3 Flow chart of fault diagnosis algorithm
Figure 4-4 Quarter car simulator
Figure 4-5 Fault diagnosis algorithm of damper on ISO A class Figure 4-6 Fault diagnosis algorithm of damper on ISO B class Figure 4-7 Fault diagnosis algorithm of tire on ISO A class Figure 4-8 Fault diagnosis algorithm of tire on ISO B class Figure 4-9 PSD of damping force when faults is occurred simultaneously
Figure 4-10 PSD of damping force when faults is occurred simultaneously
1. 서론
댐퍼나 타이어는 현가시스템의 중요한 부품으로서 차량의 운동특성에 큰 영향을 미친다. 댐퍼의 경우 노화나 밀폐류의 고장이 발생하면 감쇠력의 변화가 일어날 수 있으며 이 영향으로 차량의 제동거리가 늘어날 수도 있다. 또한 타이어의 공기압의 감소는 승차감과 주행안정성을 떨어뜨리며 타이어의 빠른 마모를 가져온다[1]. 그러나 50%의 운전자가 규정 공기압보다 낮은 공기압인 상태로 주행하고 있다는 조사[1]를 통하여서도 민감한 운전자가 아니면 이러한 고장 상황을 숙지하여 차량의 상태를 점검하기 어렵다.
따라서 이러한 문제점들이 발생했을 경우 차량 스스로 고장 상황을 인식하고 정확하게 분석하여 운전자에게 알리는 것이 필요하다고 할 수 있다.
1970 년대부터 시작된 고장진단은 근래에 와서 많은 기계적인 장치가 전자적인 장치로 바뀌면서 더욱 더 중요한 분야로 인식되었다. 특히 신뢰성과 안전성의 확보가 절대적인 항공기나 자동차등의 시스템에서 고장진단에 관한 연구는 계속적으로 이루어져 왔다.
이러한 고장진단은 크게 고장발견과 고장진단 과정으로 분류할 수 있는데 고장발견은 시스템의 이상여부의 발생을 판단하는 것이며
고장진단은 고장 발견 후의 과정으로써 고장의 위치, 크기 , 정확성 등을 판단하는 과정이다. 고장발견 및 고장진단에는 여러 가지 방법들이 연구되어 왔는데 고장발견은 가장 간단한 상한값 검사(limit-
checking method)와 모델기반 방법 (model-based method) 등으로 분류할 수 있으며, 고장진단은 classification method, diagnostic reasoning method 등으로 분류하며 시스템과 상황에 따라 다른 방법을 적용하기도 한다[2].
본 연구에서는 댐퍼와 타이어의 고장 상황을 분석하는 알고리즘을 제안하고자 한다. 이를 위해 고장발견은 모델기반 방법 중 파라미터 추정 방법으로서 댐퍼의 감쇠력과 동적 타이어힘을 관측하는 방법을 이용하고자 한다. 이 방법은 댐퍼, 타이어의 모델을 이용하여 정확한 파라미터값을 관측하는 것이 중요하므로 댐퍼와 타이어의 모델의 정확도의 중요한 요건이 된다. 그러나 댐퍼, 타이어와 같은 부품들은 실제 큰 비선형성을 가지고 있으므로 측정된 신호를 바탕으로 수학적인 모델로 근사화시키는 기존의 모델링 기법으로는 정확한 모델을 얻기 어렵다. 따라서 본 연구에서는 신경망 알고리즘을 이용하여 비선형성이 강한 시스템의 모델링을 용이하게 하여 기존의 모델링 기법의 단점을 극복할 수 있는 EDM 기법[3]을 이용하고자 한다. 고장진단은 신경망 모델로부터 계산된 두 파라미터의 주파수
특성변화를 감지하여 고장여부를 분석하고 운전자에게 알리는 과정으로 이루어지도록 하고자 한다.
2. 신경망
인간의 신경체계를 수학적으로 모방한 신경망은 단순한 기능을 가진 무수히 많은 신경 소자(neuron) 또는 처리 소자(PE : processing element)들이 병렬 연결된 연산 구조로 되어 있다[12]. 이런 신경망은 병렬 분산 처리를 할 수 있을 뿐만 아니라, 학습이나 훈련을 통해서 결선 가중치를 조정하여 정보를 추가하거나 변경할 수 있는 적응 특성도 가지고 있다.
2.1 다층신경망
Rosenblatt(1958)에 의해 처음 소개된 퍼셉트론(perceptron)은 선형 함수를 사용하여 입력 패턴을 분류하는데 사용되었다. 입력을 여러 패턴으로 분류하기 위해서는 어떠한 경계가 필요하게 된다. 하지만 선형 함수를 이용한 단층 퍼셉트론은 선형 함수로 입력패턴의 경계를 만들지 못하는 경우에는 사용할 수 없는 심각한 문제를 지니고 있다.
이를 극복하고자 하는 시도는 많이 있었지만 70년대 중반에 들어서야 비로서 다층 신경망과 비선형 함수를 사용하여 이 문제를 해결 하였다.
다층 신경망에서는 비선형 함수를 사용하기 때문에 입력을 분류하는 경계 또한 비선형으로 나타내어 진다. 이 비선형 경계를 이용하여 시스템의 입력과 출력의 관계를 묘사할 수 있다.
일반적인 다층 신경망이 Fig. 2-1에 나타나 있다.
Figure 2-1 General multilayer neural network[11]
신경망으로 입력이 들어오는 층을 입력층, 신경망으로부터 출력이 나가는 층을 출력층이라 하며 나머지 층은 은닉층이라 한다. 각각의 층의 뉴런에는 작동 함수가 있으며 이런 뉴런들은 연결 가중치에 의해 연결되어 있다. 따라서 신경망의 입력과 출력의 관계는 뉴런의 작동 함수와 연결 가중치에 의해 나타낼 수 있으며 Fig. 2-1에 대한 신경망의 입력과 출력의 관계를 Eq. (2-1)에 나타내었다.
) ) ) (
(
( 3,2 2 2,1 1 1,0 1 2 3
3 W f W f W p b b b
f
o= + + + (2-1)
여기서
p : Input vector
o: Neural network output vector W : Weight matrix
b : Bias vector
f : Activation function vector
이며 위 첨자는 층을, 아래 첨자는 층의 연결을 의미한다. 따라서 시스템 입력과 시스템 출력 패턴의 관계를 잘 묘사할 수 있는 가중치를 찾으면 신경망이 시스템의 모델이 될 수 있는 것이다.
적당한 가중치를 구하기 위해서는 신경망의 학습이 필요하며 학습의 종류는 크게 교사 학습과 비교사 학습으로 나누어 진다. 교사 학습은 입력과 출력을 미리 알고 있을 때 입력과 출력의 패턴을 분류하기 위해 사용되며 비교사 학습은 입력은 알지만 출력을 알지 못할때 출력의 패턴을 찾기위해 사용한다. 신경망을 시스템 모델링에 사용할 경우에는 입력과 출력의 패턴이 있으므로 교사 학습 방법이 사용된다.
2.2 오류 역전파 알고리즘
신경망을 학습시키는 목적은 출력 패턴과 신경망 출력 패턴과의 오차를 최소화하는 가중치를 찾아 내는 것이다. P개의 입력 패턴이 주어지고 이에 대한 K 차원의 출력 패턴d를 Eq. (2-2)와 같이 정의하고,
P p d
d
dp p pK
p =( ,1, ,2, ⋅⋅⋅⋅, , ) for 1≤ ≤
d (2-2)
또한 주어진 입력 패턴에 대한 신경망의 출력 패턴 o를 Eq. (2-3)과 같이 정의하면,
P p o
o
op p pK
p =( ,1, ,2,⋅⋅⋅⋅, , ) for 1≤ ≤
o (2-3)
오차는 Eq. (2-4)와 같이 정의 할 수 있다.
∑
== P
p
p
Err p
Error
1
) ,
(o d (2-4)
여기서Err은 오차 함수이며 일반적으로 2차 함수(quadratic function)의 형태로 나타내어 진다. 따라서 학습의 목표는 오차 함수를 최소화하는 가중치를 찾는 것이다.
Figure 2-2 Concept of the weight training
Fig. 2-2 는 신경망의 기본적인 학습 개념을 나타내고 있다. 새로운 가중치 wnew는 이전의 가중치 wold에서의 접선의 기울기와 반대 방향으로 향하며 최종적으로 오차 함수의 최소점에 도달하게 된다.
이러한 기본 개념으로 다층 신경망 교사 학습에서 가장 많이 사용하는 학습 알고리즘은 오차 역전파 알고리즘이다. 오류 역전파 알고리즘은 1970년대 초 Werbos 에 의해 개발 되었으며, 1986년
Rumelhart 에 의해 크게 발전하였으며 특히 시스템 모델링에 많이 사용되어 왔다.
입력과 출력층을 포함하여 총 3 개의 층을 가진 신경망에 대한 오류 역전파 알고리즘을 적용하는 방법은 Fig. 2-3과 Fig. 2-4와 같다.
Figure 2-3 Flow of error in back-propagation algorithm[11]
Fig. 2-4에서 각각의 노드의 활성 함수는 δ로 같다고 가정하였다.
결국 오류 역전파 알고리즘은 시스템 출력과 신경망 출력의 오차에 의해 신경망의 출력층부터 입력층까지 오차를 줄이기 위해 가중치가 변하게 되며 이는 곳 오차가 뒤로 전파되는 형상을 갖는다.
Start with randomly chosen weights;
while MSE is unsatisfactory
and computational bounds are not exceeded, do for each input pattern xp, 1≤ p≤P,
Compute hidden node inputs (net(p1, j)); Compute hidden node outputs (x(p1, j)); Compute inputs to the output nodes (net(p2,k)); Compute the network outputs (op,k);
Compute the error between op,k and desired output dp,k; Modify the weights between hidden and output nodes :
) 1 (
, ) 2 (
, ' , , )
1 , 2 (
,j ( pk pk) ( pk) p j
k d o net x
w =η − δ
∆
Modify the weights between input and hidden nodes :
i p j p j
k k p k
p k p i
j d o net w net x
w(1,,0) =η
∑
(( , − , )δ'( (2,)) (2,,1))δ'( (1,)) ,∆
end-for end-while.
Figure 2-4 Back-propagation training algorithm[11]
3. 모델링
시스템을 모델링 하는 방법에는 여러 가지가 있겠지만 크게 두 가지로 분류할 수 있다. 하나는 화이트박스 모델링 기법이고 다른 하나는 블랙박스 모델링 기법이다. 화이트박스 모델링 기법은 시스템의 파라미터와 상태 변수를 이용하여 수학적으로 모델링 하는 방법이다. 이에 반해 블랙 박스 모델링 기법은 시스템 입력과 시스템 출력 사이의 관계를 커브 피팅 등의 방법을 이용하여 묘사하는 것이다.
각각의 모델링은 나름대로의 장단점을 가지고 있다. 화이트박스 모델의 경우 시스템의 파라미터등을 이용하여 만든 모델이며 파라미터 변화에 의한 결과를 쉽게 관찰 할 수 있기 때문에 설계나 제어등과 같은 시스템의 파라미터를 필요로 하는 분야에서 사용된다.
하지만 수학적인 모델이기 때문에 고차의 시스템의 경우 모델링 하는데 많은 수치 연산을 요구한다. 또한 모든 시스템의 파라미터를 측정 및 추정하는 것은 어려우며 실제로 불가능한 경우도 있다. 이런 경우에는 시스템 입력과 시스템 출력을 묘사하는 블랙박스 모델이 사용된다. 이번 절에서 소개할 EDM(Empirical Dynamics Modeling)[2]기법도 블랙박스 모델링의 한 기법이다.
3.1 EDM(Empirical Dynamics Modeling)
블랙박스 모델링 기법은 블랙박스 모델링 기법에 비해 적은 수치연산을 요구하며 시스템의 복잡성과 차수에 영향을 많이 받지 않는다. 따라서 시스템의 파라미터나 상태 변수등의 영향을 알아보는 것이 주 목적이 아니라면 블랙박스 모델링 기법은 좋은 모델링 방법이 될 수 있다.
또한 모델링 되는 시스템의 특성이 정적비선형 (static nonlinear) 또는 선형동적(linear dynamic) 인가에 따라 블랙박스 모델링 방법이 달라진다. 정적비선형인 경우에는 커브피팅 등의 방법이 사용되며, 선형동적인 경우에는 FRF(Frequency Response Functions) 방법이 사용된다. 하지만 대부분의 시스템들이 이 두가지, 즉 정적비선형과 선형동적의 특성을 모두 포함하고 있기 때문에 기존의 방법들로는 정확한 모델을 구하기가 어렵다. 이를 해결하기 위한 몇몇 방법들이 개발 되었지만 여전히 정확한 모델을 구하는데는 한계가 있다. EDM 기법은 이런 문제점을 해결하기 위해 MTS System Corporation 에서 개발한 기법이다.
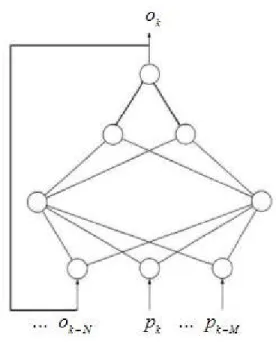
EDM 기법은 신경망에 기반을 둔 방법이다. Fig. 3-1는 EDM 기법에 사용되는 기본적인 신경망의 구조를 나타낸다. 입력층에 시간 지연 입력을 넣어 묘사하고자 하는 시스템의 동특성을 나타낼 수 있으며 신경망 내의 tangent sigmoid 와 같은 비선형 활성 함수를 이용하여
시스템의 비선형성을 나타낼 수 있다. 입력층은 지간 지연항에 의해 과거와 현재의 입력값과 과거의 출력값으로 구성되어 있으며 신경망의 목적은 M+N 차원의 입력값을 1차원의 출력값으로 사상하는 역활을 하는 비선형 함수를 찾아내는 것이다. 시스템의 이런 비선형 함수의 역활은 신경망의 가중치에 의해 묘사되며 가중치는 오차 역전파 알고리즘과 같은 신경망의 학습을 통해 구해진다.
Figure 3-1 Tapped delay neural network structure for EDM
신경망을 학습 시키기 위해서는 적어도 서로 다른 두 종류의 시스템 입력과 출력 데이터 셋이 필요하다. 한 종류는 신경망을 학습 시키기 위한 데이터 셋이며 다른 하나는 신경망의 학습 효과를 판단하기 위한
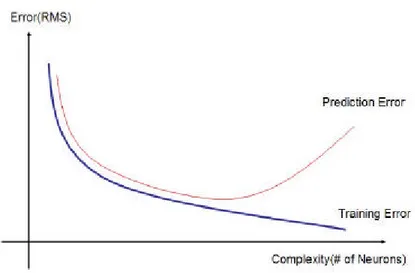
데이터 셋이다. 학습에 사용된 시스템 출력값과 신경망 출력값의 사이의 오차는 신경망 뉴런의 수나 은닉층의 수를 증가 시키면 감소 시킬 수 있다. 하지만 시스템 출력값과 신경망 출력값의 차가 작다고 하여 신경망이 잘 학습 되었다고 할 수 없으며 학습에 사용되지 않은 다른 종류의 데이터 셋을 이용하여 학습의 여부를 확인 하여야 한다.
이는 신경망 학습에서 쉽게 나타나는 기억 현상 때문이다.
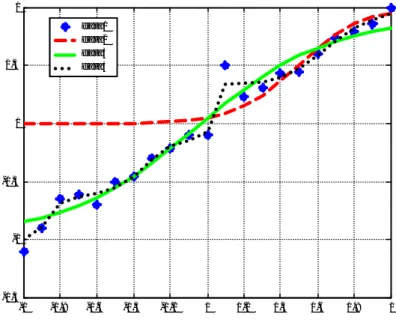
기억 현상은 Fig. 3-2과 Fig. 3-3을 보면 쉽게 이해할 수 있다.
Figure 3-2 Training error vs. Prediction error
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1
-1.5 -1 -0.5 0 0.5 1
d a t a 1 d a t a 2 d a t a 3 d a t a 4
Figure 3-3 Multiple fittings
뉴런의 수가 많아 지거나 은낵층의 수가 많아지면 많아 질 수록 학습에 사용된 데이터와 신경망 출력 데이터와의 오차는 감소하지만 학습에 사용되지 않은 데이터를 사용해 보면 어느 시점에서 오차는 증가 하는 것을 Fig. 3-2에서 볼 수 있다. 이것은 Fig. 3-3에서 보이는 오버피팅의 효과와 같은 것이다. 이와 같이 되면 신경망은 기억을 하게 되므로 더 이상 학습을 하지 않는다. 이러한 현상들을 방지하기 위해서 적절한 뉴런과 은닉층의 수를 찾아야 하며, 학습에 사용되지 않은 데이터를 이용하여 학습의 효과를 확인하여야 한다.
3.2 뎀퍼 모델링
댐퍼는 비선형성이 강한 시스템으로서 이러한 비선형성을 정확히 모델링하는 것은 상당히 어려운 일이다. 그러나 차량개발시 차량 운동 해석과 같은 과정에서 댐퍼의 모델은 필수조건이기 때문에 좀 더 정확한 댐퍼의 비선형성을 모델링하기 위한 연구들이 다각적으로 이루어져 왔다.
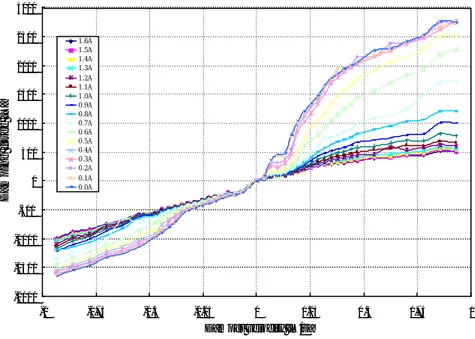
Fig. 3-5는 차량 운동 시뮬레이션시 주로 사용되고 있는 모델의 하나로 시험을 통해 얻어진 데이터를 이용해 다항식 형태로서 모델링 되었으며 가변댐퍼의 감쇠특성 변화를 잘 보여주고 있다. 이러한 데이터는 주로 정현파 입력시험으로부터 얻어진 데이터이며 실제 측정된 데이터를 살펴보면 동특성이 Fig. 3-6과 같이 상당히 크게 나타남을 알 수가 있다. 따라서 이렇게 동특성이 크게 나타나는 경우에 Fig. 3-5와 같이 동특성을 무시한 모델로 변환하는 것은 부적절하다.
이러한 댐퍼의 비선형 모델링에 따르는 문제를 극복하기 위해 80 년대 초반부터 신경망을 이용하여 모델링하는 연구가 시작되었다.
신경망을 이용한 모델링은 고전적인 방법들로 해결하기 어려웠던 부분들을 해결할 많은 가능성을 보였으며, 특히 비선형 동적 시스템의 모델링 문제에 있어 오류 역전파 알고리즘은 만족할 만한 결과를 보여주었다 [3, 4, 5].
-2000 -1500 -1000 -500 0 500 1000 1500 2000 2500 3000
-1 -0.75 -0.5 -0.25 0 0.25 0.5 0.75 1
Damper velocity [m/s]
Damping force [N]
1.6A 1.5A 1.4A 1.3A 1.2A 1.1A 1.0A 0.9A 0.8A 0.7A 0.6A 0.5A 0.4A 0.3A 0.2A 0.1A 0.0A
Figure 3-5 Polynomial damper model
-0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5
- 5 0 0 0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0
D a m p e r v e l o c i t y [ m / s ]
Damping force [N]
A m p l i t u d e : 2 0 m m ( I n s i d e ) A m p l i t u d e : 3 0 m m ( M i d d l e ) A m p l i t u d e : 4 0 m m ( O u t s i d e )
Figure 3-6 Dynamic characteristics of variable damper
본 연구에서는 비선형문제와 동특성 문제를 해결할 수 있는 방법으로서 신경망을 이용한 모델링 기법을 사용하였다. 특히 MTS
System Corporation에서 개발한 EDM기법에 기반하여 신경망을 설계하였다 . Fig. 3-7은 본 논문에서 사용된 신경망의 구조를 나타내고 있다. Fig. 3-7로부터 알 수 있듯이 모델링을 위해 3개의 은닉층를 이용하였으며 뉴런의 활성함수로는 비선형성을 고려하여 hyperbolic tangent sigmoid 함수를 사용하였다. 또한 동특성을 고려하기 위해 시간 지연(time delay)신호를 이용하였다[6, 7]. 신경망을 학습 시키기 위해 오류 역전파 알고리즘을 사용했으며, 입력값으로는 댐퍼시험으로부터 얻을 수 있는 상대가속도, 상대속도, 상대변위
3 가지를 이용하였다. 목표값으로는 이때 로드셀에서 측정된 감쇠력을 이용하였다 .
시험을 위한 입력 신호로는 일반적으로 댐퍼에 가진되는 노면 신호와 유사한 불규칙 신호를 이용하였으며 고속도로와 같이 좋은 도로부터
Figure 3-7 Neural network model
일반 도로 노면까지 여러범위의 신호를 이용하여 어떠한 입력 조건에서도 적용이 가능하도록 하였다. Fig. 3-8은 댐퍼 측정 시스템을 나타내고 있다. 가진기에 가속도 측정기를 부착하였으며 댐퍼 끝단에 댐핑력을 측정하기 위한 러드셀이 있다. 뎀퍼 변위를 측정하기 위해서 변위 측정기도 부착 하였다.
Figure 3-8 Damper test equment
댐퍼 측정 시스템으로 부터 얻은 데이터를 이용하여 Fig. 3-9에 사용된 댐퍼의 특성을 나타내었다. 예상대로 상당히 비선형성이 큼을 알 수 있다.
Fig. 3-10 은 신경망을 이용하여 만든 모델을 임의의 불규칙 입력 신호을 주었을 때 로드셀의 측정 신호와 신경망 모델과의 결과를 비교하고 있다. 이것은 곧 실제 댐핑력과 신경망에 의해 모델링된 댐핑력을 나타낸다. Fig. 3-11 에서 볼 수 있듯이 오차가 10N 근방으로 신경망 모델이 정확하게 수렴함을 알 수 있다.
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8
-1500 -1000 - 5 0 0 0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0
D a m p i n g V e l o c i t y [ m / s ]
Damping Force [N]
Figure 3-9 Force-Velocity diagram of the damper
0 1 0 0 2 0 0 3 0 0 4 0 0 5 0 0 6 0 0 7 0 0 8 0 0 9 0 0 1 0 0 0 - 1 5 0 0
- 1 0 0 0 - 5 0 0 0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 2 5 0 0 3 0 0 0
N u m b e r o f d a t a
Damping force [N]
M e a s u r e d d a t a
N e u r a l n e t w o r k d a m p e r m o d e l E r r o r
Figure 3-10 Comparison of measured force and neural network model
0 1 0 0 2 0 0 3 0 0 4 0 0 5 0 0 6 0 0 7 0 0 8 0 0 9 0 0 1 0 0 0 -20
-15 -10 -5 0 5 10 15
N u m b e r o f d a t a
Force [N]
D a m p i n g f o r c e e r r o r
Figure 3-11 Error between measured and neural network model
3.3 타이어 모 델 링
본 연구에서는 서론에서 언급한 바와 같이 타이어 공기압의 관측이 목적이므로 수직방향의 타이어 모델만으로도 충분히 그 결과를 얻을 수 있다. 수직방향의 타이어 모델은 Fig. 3-12와 같은 1/4차량 모델의 운동방정식 Eq. (3-1)로부터 Eq. (3-2)와 같이 나타낼 수 있다.
m
sm
uZ Zss
ZZuu
Z Zrr
Spring force Damping force
Tire force
m
sm
uZ Zss
ZZuu
Z Zrr
Spring force Damping force
Tire force
Figure 3-12 Quarter car model
force Tire force Spring force
Damping x
m
force Spring force
Damping x
m
u u
s s
+
−
−
=
+
=
..
..
(3-1)
..
..
u u s
s x m x
m force
Tire = + (3-2)
측정된 센서신호와 Eq. (3-2)를 이용하여 동적타이어힘을 계산한 후 이를 신경망의 목표(target)로 설정하여 신경망 타이어 모델을 얻을 수 있다. 모델링에 필요한 신경망에 대한 사항은 댐퍼 모델링시와 동일하며 입력신호는 상대가속도가 아닌 스프렁질량과 언스프렁 질량의 가속도와 좀더 정확한 결과를 얻기위해 상대 변위 신호를 추가하였다 .
Fig. 3-13 은 모델링한 결과를 또 다른 임의의 불규칙 입력 신호로 검증한 결과를 나타내고 있다. Fig. 3-14에서 보듯이 오차범위가 50N 이내로 거의 정확하게 모델을 따라가고 있음을 알 수 있다.
0 1 0 0 2 0 0 3 0 0 4 0 0 5 0 0 6 0 0 7 0 0 8 0 0 9 0 0 1 0 0 0
-4000 -3000 -2000 -1000 0 1 0 0 0 2 0 0 0 3 0 0 0 4 0 0 0
N u m b e r o f d a t a
Tire force [N]
M e a s u r e d d a t a
N e u r a l n e t w o r k t i r e m o d e l E r r o r
Figure 3-13 Comparison of measured force and neural network model
0 1 0 0 2 0 0 3 0 0 4 0 0 5 0 0 6 0 0 7 0 0 8 0 0 9 0 0 1 0 0 0 -40
-30 -20 -10 0 10 20
Force [N]
N u m b e r o f d a t a
T i r e f o r c e e r r o r
Figure 3-14 Error between measured and neural network model
4. 고장 발견 및 진 단
4.1 고장 발견 및 진단의 기본 고안
Buβhardt 는 파라미터 추정 기법을 이용하여 가변댐퍼의 감쇠력을 관측함으로써 댐퍼의 상태를 감지하고자 하였다[1]. 그러나 이 방법은 댐퍼의 비선형성이나 동특성을 충분히 고려하지 않고 단순히 속도에 따른 감쇠력의 크기만을 선형적으로 추측한 것이므로 실제 댐퍼의 특성을 정확히 고려했다고 보기 어렵다. 따라서 본 연구에서는 이러한 댐퍼의 특성을 고려하기 위해 3장에서 얻은 신경망 댐퍼 모델을 이용하여 감쇠력을 구한 후 감쇠력의 주파수 특성 변화를 이용하여 댐퍼의 상태를 유추하고자 한다.
타이어의 경우, 기존의 방법에서는 고유진동수를 구하는 대수 방정식을 이용하여 타이어의 공기압을 관측하였으며 [1] 이때 방정식에 쓰이는 차량의 변수들은 선형으로 가정하였다. 본 연구에서는 이러한 차량 변수들을 선형으로 가정할 필요가 없는 신경망 타이어 모델을 이용하여 타이어에 걸리는 힘을 구한 후 주파수 분석을 수행하여 그 특성의 변화를 통하여 고장을 감지하고자 한다.
Fig. 4-1과 Fig. 4-2는 댐퍼가 노화되어 연해지는 경우와 타이어의 공기압이 부족한 경우에 나타나는 경향을 파악하기 위한 1/4 차량 시뮬레이션 결과를 보이고 있다. 이때 댐퍼 모델로서는 Fig. 3-5의 비선형 댐퍼를 이용하였으며 타이어는 강성계수를 상수로 가정한
타이어 모델을 이용하였다. 노면 입력 신호는 일반 불규칙 도로 노면을 사용하였다 . Fig. 4-1은 댐퍼의 감쇠력의 PSD(Power Spectral Density)를 나타내고 있으며 Fig. 4-2는 동적 타이어힘의 PSD를 나타내고 있다.
Fig. 4-1에서 볼 수 있듯이 댐퍼의 감쇠계수가 다를 경우 2 – 20 Hz 영역에서 두 신호가 차이가 많이 나고 있음을 알 수 있다. 특히 2-9 Hz사이에서의 신호차가 많이 난다. 그리고 Fig. 4-2는 타이어의 강성계수가 작아지면 9-20 Hz 에서 두 신호차가 많이 남을 알 수 있다.
2 4 6 8 10 12 14 16 18 20
0 2 4 6 8 10
x 1 06
F r e q u e n c y [ H z ] PSD of damping force [N2 /Hz]
Hard Soft
Figure 4-1Effect of variation of damping coefficient via 1/4 car simulation
0 2 4 6 8 1 0 12 1 4 16 18 20 0
1 2 3 4 5 6 7 8x 106
F r e q u e n c y [ H z ] PSD of tire force [N2/Hz]
N o r m a l a i r p r e s s u r e W e a k a i r p r e s s u r e
Figure 4-2 Effect of variation of tire stiffness via 1/4 car simulation
4.2 고장 발견 및 진 단 알고리즘
4.1 절의 시뮬레이션 결과를 통하여 댐퍼의 감쇠력은 2-9Hz 영역을 이용하여 고장여부 판단이 가능할 것으로 보여지며, 타이어의 공기압의 감소 유무는 동적 타이어힘의 9-20 Hz 영역을 이용하여 고장 여부를 판단할 수 있다. 따라서 고장발견을 위해서는 동시에 고장 전 상태의 감쇠력과 고장 후의 감쇠력의 주파수 특성을 비교할 수 있어야 한다.
본 연구에서는 이를 위하여 Eq. (3-1)를 이용하여 Eq. (4-1)과 같이 감쇠력을 센서 신호로부터 바로 계산을 하여 현재 댐퍼의 상황을 파악할 수 있도록 하였다. 그리고 이때 같은 센서 신호를 이용하여
신경망 댐퍼 모델로부터 참조 감쇠력을 얻도록 하였다. 즉, Eq. (4- 1)으로부터 얻게되는 감쇠력은 댐퍼에 고장이 발생한 경우에 고장난 상태의 감쇠력의 주파수 특성을 알려주게 되며, 신경망 댐퍼 모델로부터는 고장 전 상태의 감쇠력이 얻어지게 되는 것이다. 따라서 이 두 신호의 차이로부터 고장 상황을 파악할 수 있게 된다. 스프링은 고장진단영역인 20Hz 미만에서는 거의 선형적으로 작동하므로[10]
스프링상수값을 상수로 정하였으며 이에 따라 스프링힘은 LVDT 측정 신호와 스프링상수를 곱해서 얻을 수 있다.
force Spring
x m force
Damping = s ..s− (4-1)
앞에서 서술한 내용을 고장발견 및 진단하는 알고리즘으로 구현하여 Fig. 4-3에 나타내었다. 신경망 댐퍼 모델은 상대 가속도, 상대 속도, 상대 변위를 입력으로 필요로 하므로 측정되지 않는 입력인 상대 속도는 두개의 가속도 신호를 적분하여 계산하였다. 이러한 과정을 통해서 고장이 발생된 것으로 판단이 되면 이 고장의 판별에 대해 정확성을 높이기 위해 사용자가 정한 횟수만큼 데이터를 반복적으로 측정하여 계속 같은 결과가 나오는지를 판별한다. 고장에 대한 판단이 계속 나오면 컴퓨터는 운전자에게 시스템의 고장 상황을 알려주게 된다.
Acceleration signal o f s p r u n g m a s s Acceleration signal
o f s p r u n g m a s s Acceleration signal
of u n s p r u n g m a s s Acceleration signal
of u n s p r u n g m a s s L V D T s i g n a l o f s u s p e n s i o n d e f l e c t i o n
L V D T s i g n a l o f s u s p e n s i o n d e f l e c t i o n
G e n e r a t i o n o f v e l o c i t y s i g n a l f r o m s e n s o r s i g n a l s G e n e r a t i o n o f v e l o c i t y s i g n a l
f r o m s e n s o r s i g n a l s
D a m p i n g f o r c e c a l c u l a t i o n f r o m N N d a m p e r m o d e l D a m p i n g f o r c e c a l c u l a t i o n
f r o m N N d a m p e r m o d e l
D a m p i n g f o r c e c a l c u l a t i o n F r o m s e n s o r s i g n a l s D a m p i n g f o r c e c a l c u l a t i o n
F r o m s e n s o r s i g n a l s Tire force calculation f r o m N N d a m p e r m o d e l
Tire force calculation f r o m N N d a m p e r m o d e l
C o m p a r i s o n o f t w o f o r c e s
C o m p a r i s o n o f t w o f o r c e s C o m p a r i s o n o f t w o f o r c e sC o m p a r i s o n o f t w o f o r c e s Frequency analysis
Frequency analysis Frequency analysisFrequency analysis
F a u l t i s d e t e c t e d ? F a u l t i s d e t e c t e d ?
Storage of analyzed data Storage of analyzed data
Notify a driver of the fault on the damper or tire !!!
Notify a driver of the fault on the damper or tire !!!
Iteration is Nth?
Iteration is Nth?
W a i t t h e n e x t c h e c k i n g - t i m e W a i t t h e n e x t c h e c k i n g - t i m e N O
N O
Y E S Y E S Acceleration signal
o f s p r u n g m a s s Acceleration signal
o f s p r u n g m a s s Acceleration signal
of u n s p r u n g m a s s Acceleration signal
of u n s p r u n g m a s s L V D T s i g n a l o f s u s p e n s i o n d e f l e c t i o n
L V D T s i g n a l o f s u s p e n s i o n d e f l e c t i o n
G e n e r a t i o n o f v e l o c i t y s i g n a l f r o m s e n s o r s i g n a l s G e n e r a t i o n o f v e l o c i t y s i g n a l
f r o m s e n s o r s i g n a l s
D a m p i n g f o r c e c a l c u l a t i o n f r o m N N d a m p e r m o d e l D a m p i n g f o r c e c a l c u l a t i o n
f r o m N N d a m p e r m o d e l
D a m p i n g f o r c e c a l c u l a t i o n F r o m s e n s o r s i g n a l s D a m p i n g f o r c e c a l c u l a t i o n
F r o m s e n s o r s i g n a l s Tire force calculation f r o m N N d a m p e r m o d e l
Tire force calculation f r o m N N d a m p e r m o d e l
C o m p a r i s o n o f t w o f o r c e s
C o m p a r i s o n o f t w o f o r c e s C o m p a r i s o n o f t w o f o r c e sC o m p a r i s o n o f t w o f o r c e s Frequency analysis
Frequency analysis Frequency analysisFrequency analysis
F a u l t i s d e t e c t e d ? F a u l t i s d e t e c t e d ?
Storage of analyzed data Storage of analyzed data
Notify a driver of the fault on the damper or tire !!!
Notify a driver of the fault on the damper or tire !!!
Iteration is Nth?
Iteration is Nth?
W a i t t h e n e x t c h e c k i n g - t i m e W a i t t h e n e x t c h e c k i n g - t i m e N O
N O
Y E S Y E S
Figure 4-3 Flow chart of fault diagnosis algorithm
4.3 실험 장치
본 연구에서는 댐퍼와 타이어의 고장진단을 위해 Fig. 4-4과 같은 1/4차량 시뮬레이터를 이용하였다. 댐퍼의 경우 적절하게 고장이 발생한 상황을 재현하기 위하여 가변댐퍼를 사용하여 감쇠력을 변화시켜서 댐퍼의 누유현상 등에 의해 댐퍼계수가 작아지는 상황을 가상으로 재현하였으며 , 타이어는 공기압을 감소시켜서 시험을 수행하였다 . 스프렁 질량은 270 Kg, 언스프렁 질량은 50Kg, 스프링
상수는 28600 N/m이다. 댐퍼는 경(hard)한 상태를 정상상태로 가정하였고 고장 상황은 연(soft)한 상태로 변화를 주어 재현하였다.
타이어의 공기압은 정상상태인 경우 32psi, 고장상황의 경우 20 psi의 공기압을 이용하였다.
Figure 4-4 Quarter car simulator
4.4 고장 진단 알고리즘의 검증
4-3절에서 언급한 고장진단 대한 검증을 위해 본 연구에서는 실제 도로면과 거의 유사한 여러 가지 노면을 이용하여 고장 진단
알고리즘에 대한 강인성을 검증하였다. Fig. 4-5와 Fig. 4-6은 앞 절의 알고리즘의 반복 횟수를 5회로 하였을 때 각 노면에 대한 평균 PSD 값을 나타내고 있다. 앞서 제안한 알고리즘에서와 같이 2- 9Hz영역에서 두 가지 노면 모두 신경망댐퍼 모델에서 추정한 값에 비해 Eq. (4-1)으로부터 추정한 값이 작음을 보이고 있다. 이는 댐퍼의 상태가 연(soft)해졌음을 보여주는 결과로서, 신경망 댐퍼 모델에 의한 고장진단 알고리즘이 노면의 상태와 상관없이 작동 가능함을 보여주는 것이다. Fig. 4-7과 Fig. 4-8 은 타이어가 공기압이 정상일 때와 규격보다 작은 두 가지 경우에 대해 ISO A 와 ISO B 규격 노면을 주행했을 때의 시험 결과를 나타내고 있다. 두 가지 노면 모두 PSD 의 상대적인 크기는 다르지만 공기압이 20 psi인 경우 9-20 Hz 영역에서 고장후의 신호가 작음을 알 수있다. Fig. 4-9와 Fig. 4-10 은 ISO A 규격 노면을 주행했을 경우 타이어와 댐퍼에 동시에 고장이 발생했을 경우의 결과를 나타내고 있다. Fig. 4-9에서는 타이어 공기압 변화의 영향으로 9-20 Hz영역에서 예상 결과와 약간의 차이를 보이고 있으나 전반적으로 앞의 댐퍼진단 결과와 유사한 결과를 볼 수 있으므로 고장진단이 가능함을 알 수 있다. 또한 , Fig. 4-10 역시 댐퍼의 고장에는 무관하게 9-20 Hz사이에서 신호차가 큼을 볼 수 있다. 따라서 이를 통하여 댐퍼와 타이어의 고장 진단 시에 두 요소가 서로에게 영향을
크게 미치지 않음을 알 수 있으므로 위에서 제안한 알고리즘으로 효과적으로 고장을 진단할 수 있다.
2 4 6 8 10 12 14 16 18 20
0.5 1 1.5 2 2.5 3 3.5
x 1 06
F r e q u e n c y [ H z ] PSD of damping force [N2 /Hz]
N e u r a l n e t w o r k d a m p e r m o d e l E s t i m a t e d d a t a f r o m s e n s o r s i g n a l s
Figure 4-5 Fault diagnosis algorithm of damper on ISO A class
2 4 6 8 10 12 14 16 18 20 0.5
1 1.5 2 2.5
x 1 07
F r e q u e n c y [ H z ] PSD of damping force [N2 /Hz]
N e u r a l n e t w o r k d a m p e r m o d e l E s t i m a t e d d a t a f r o m s e n s o r s i g n a l s
Figure 4-6 Fault diagnosis algorithm of damper on ISO B class
0 2 4 6 8 10 12 14 16 18 20
1 2 3 4 5 6 7 8
x 1 06
F r e q u e n c y [ H z ] PSD of tire force [N2 /Hz]
N e u r a l n e t w o r k t i r e m o d e l
E s t i m a t e d d a t a f r o m s e n s o r s i g n a l s
Figure 4-7 Fault diagnosis algorithm of tire on ISO A class
2 4 6 8 10 12 14 16 18 20 0
0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
x 1 07
F r e q u e n c y [ H z ] PSD of tire force [N2 /Hz]
N e u r a l n e t w o r k t i r e m o d e l E s t i m a t e d d a t a f r o m s e n s o r s i g n a l s
Figure 4-8 Fault diagnosis algorithm of tire on ISO B class
0 2 4 6 8 10 12 14 16 18 20
0 1 2 3 4 5
x 1 06
F r e q u e n c y [ H z ] PSD of damping force [N2 /Hz]
N e u r a l n e t w o r k d a m p e r m o d e l E s t i m a t e d d a t a f r o m s e n s o r s i g n a l s
Figure 4-9 PSD of damping force when faults is occurred simulataneously
4 6 8 10 12 14 16 18 20
0 1 2 3 4 5 6 7 8 9
x 1 06
F r e q u e n c y [ H z ] PSD of tire force [N2 /Hz]
N e u r a l n e t w o r k t i r e m o d e l
E s t i m a t e d d a t a f r o m s e n s o r s i g n a l s
Figure 4-10 PSD of tire force when faults is occured simulataneously
5. 결론
현가시스템의 중요한 구성 요소인 댐퍼와 타이어의 고장진단 시스템에 대한 연구를 수행하였다. 본 연구에서 제안한 고장발견 및 진단 알고리즘 및 시험결과를 정리하면 다음과 같다.
(1) 신경망을 이용한 댐퍼 및 타이어의 비선형성 및 동특성을 고려한 모델링을 수행 하였다.
(1) 주파수특성 변화를 분석하여 이를 고장발견 알고리즘에 적용하였다 .
(2) 고장진단의 정확성을 위해 여러 번 데이터를 받아서 정확한 진단을 할 수 있도록 하였다.
(3) 실제 차량이 주행하는 일반 도로 주행 시뮬레이션을 통하여 고장진단 알고리즘의 강인성을 보였다.
참고문헌
1. R. Isermann, “Diagnosis methods for electronic controlled vehicles,” AVEC’2000, 2000.
2. R. Isermann and P. Balle, “Trends in the application of model- based fault detection and diagnosis of technical processes,”
Control Eng. Practice, Vol. 5, No. 5, pp. 709-719, 1997.
3. Andrew J. Barber, “Accurate models for bushings and dampers using the empirical dynamics method,” MTS Systems Corporation.
4. Kil-Do Chong, “Nonlinear System Identification : Comparison of the traditional and the neural network approaches,” Journal of Korean Society of Precision Engineering, Vol. 12, No. 5, pp. 157- 165, 1995.
5. Kil-Do Chong, Tae-Soo No and Dong-Pyo Hong, “Nonlinear system modeling using a neural networks,” Journal of Korean Society of Precision Engineering, Vol. 13, No. 12, pp. 22-29, 1996.
6. J. Giacomin, “Neural network simulation of an automotive shock absorber,” Engng Applic. Artif. Intell. Vol. 4, No. 1, pp. 59-64, 1991.
7. Il Young Kim, Kil To Chong, Tae-Soo No and Dong Pyo Hong,
“Empirical losed loop modeling of a suspension system using neural network,” Journal of the Korean Society of Precision Engineering, Vol. 14, No. 7, pp. 29-38, 1997.
8. J. Giacomin, “Modeling of shock absorbers with neural network,”
Neural Networks, 1993.
9. Mathworks, “Neural Network Toolbox,” Manual.
10. J.Lee and D.J Thompson, “Dynamic Stiffness Formulation, Free Vibration and Wave Propagation of Helical Springs,” Journal of Sound and Vibration, 239(2), pp. 297-320, 2001.
11. Kishan Mehrotra, “Elements of Artificial Neural Networks”, The MIT Press, 1996.
12. 이 정 문 , “신경회로망의 개괄적 이해”,
제어·자동화·시스템공학회지, 제 1권 , 제 3호, 1995.
Abstract
Modeling and fault diagnosis of suspension system using neural network
by Jungho Lee
The Graduate School of Automotive Engineering, Kookmin University, Seoul, Korea
Driving safety of a vehicle is largely influenced by the damper and the tire.
Developed in this research is an algorithm of fault diagnosis for the damper and the tire so that the driver can be promptly informed when a fault occurs in one or both of the components. To this end, the damper and the tire were modeled using the neural network from their experimental data, and the fault diagnosis was made using frequency responses of the damping force and the dynamic wheel force. The algorithm was tested via experiments, and showed successful diagnostic performance under various driving conditions.
![Figure 2-1 General multilayer neural network[11] 신경망으로 입력이 들어오는 층을 입력층, 신경망으로부터 출력이 나가는 층을 출력층이라 하며 나머지 층은 은닉층이라 한다](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5256502.136550/13.774.162.608.162.516/multilayer-신경망으로-들어오는-신경망으로부터-나가는-출력층이라-나머지-은닉층이라.webp)
![Figure 2-3 Flow of error in back-propagation algorithm[11]](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5256502.136550/17.774.157.608.134.455/figure-flow-of-error-in-back-propagation-algorithm.webp)
![Figure 2-4 Back-propagation training algorithm[11]](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5256502.136550/18.774.128.655.140.803/figure-back-propagation-training-algorithm.webp)