ABSTRACT
PURPOSES : This study attempts to design and establish the road surface condition detection system by using the image processing that is expected to help implement the low-cost and high-efficiency road information detection system by examining technology trends in the field of road surface condition information detection and related case studies.
METHODS : Adapted visual information collecting method(setting a stereo camera outside of the vehicle) and visual information algorithm(transform a Wavelet Transform, using the K-means clustering) Experiments and Analysis on Real-road, just as four states(Dry, Wet, Snow, Ice).
RESULTS : Test results showed that detection rate of 95% or more was found under the wet road surface, and the detection rate of 85% or more in snowy road surface. However, the low detection rate of 30% was found under the icy road surface.
CONCLUSIONS : As a method to improve the detection rate of the mobile road surface condition information detection system developed in this study, more accurate phase analysis in the image processing process was needed. If periodic synchronization through automatic settings of the camera according to weather or ambient light was not made at the time of image acquisition, a significant change in the values of polarization coefficients occurs.
Keywords
road surface condition detection, ITS, CCTV, image processing, K-means clustering
스테레오카메라 기반 이동식 노면정보 검지시스템 개발에 관한 연구
A Development of Stereo Camera based on Mobile Road Surface Condition Detection System
김`종`훈 Kim, Jonghoon 정회원·한국건설기술연구원 도로교통연구실 전임연구원 (E-mail: [email protected]) 김`영`민 Kim, Youngmin 정회원·한국건설기술연구원 도로교통연구실 전임연구원 (E-mail: [email protected]) 백`남`철 Baik, Namcheol 한국건설기술연구원 도로교통연구실 연구위원 (E-mail: [email protected])
원`제`무 Won, Jaemoo 한양대학교 도시대학원 교수 (E-mail: [email protected])
1. 서론
1980년대 이후 급격한 자동차 보급에 따라 우리나라 는 한때 전 세계에서 도로교통사고 발생률이 가장 높은
나라였다. 교통사고 발생현황 및 사망자 수 등의 정량적 수치를 확인하였을 때, 최근 국내 도로교통 여건은 1980년대 상황에 비해 상당히 양호해졌음은 틀림없는
Corresponding Author : Kim, Jong Hoon, Researcher
Highway & Transportation Research Division, Korea Institute of Construction Technology, 283, Goyangdae-Ro, Ilsanseo-Gu, Goyang-Si, Gyeonggi-Do, 411-712, Korea
Tel : +82.31.910.0584 Fax : +82.31.910.0749 E-mail : [email protected]
International Journal of Highway Engineering http://www. ijhe.or.kr/
ISSN 1738-7159 (Print) ISSN 2287-3678 (Online)
Int. J. Highw. Eng. Vol. 15 No. 5 : 177-185 October 2013 http://dx.doi.org/10.7855/IJHE.2013.15.5.177
사실이다. 다만 OECD 기준으로 여전히 한국의 교통사 고 발생률은 최상위권에 속하여, 도로교통안전 향상에 대한 다양한 방안 마련 및 적용이 절실한 실정이다.
한편, 지능형교통체계(이하 ITS)의 발전에 따라, ITS 를 활용한 도로교통안전 향상 분야에 대한 적용의 필요 성이 높아지고 있다. 초창기 ITS의 목적이“교통혼잡 완화”였다면, 콘텐츠의“질적 확산”요구에 따라“안전 한 교통환경 조성”이 ITS의 새로운 임무로 부여되고 있 다. ‘스마트 녹색교통 실현과 신성장동력 육성을 위한 지능형교통체계(ITS) 발전전략’(2012, 국가경쟁력강화 위원회) 등 국가단위 상위계획 상에서도 ITS를 활용한 안전한 이동권 확보가 주요 아젠다로 부각되고 있으며 사회적으로도 안전운전지원 관련 기술에 대한 기술수요 가 지속적으로 이루어지고 있다.
또한 2018년 개최예정인 평창동계올림픽의 성공적인 개최를 위하여 고도화된 동절기 도로관리역량 취득 및 관련 기술개발 필요성이 제기되고 있다. 평창동계올림 픽의 수송계획 상 도로를 통한 이동이 절대적으로, 원활 한 대회 진행(선수단 및 미디어단, 관람객의 경기장 클 러스터 간 30분 이내 이동)을 위하여‘실시간 전구간 모 니터링’수준의 도로 노면상태 정보수집이 이루어져야 하며, 이를 위하여 관련 기술의 조속한 개발 및 적용이 필요할 것으로 제기되고 있다.
본 연구는 교통정보 서비스 및 도로 관리역량의 고도 화를 달성하기 위한 방법론으로 노면정보(도로 표면의 상태 정보)에 주목하였다. 수시로 변화하는 노면의 상태 를 첨단기술을 활용하여 수집, 제공할 경우 도로 이용자 의 안전향상은 물론, 위험도로구간 혹은 제설요구구간 의 실시간 확인 등 도로 관리자 측면에서의 관리역량 고 도화가 가능할 것으로 기대된다. 본 연구에서는 도로 상 의 모든 구간에 대한 노면정보를 연속적으로 검지할 수
있는 시스템을 개발하고자, 스테레오카메라를 기반으로 하는 노면정보 검지시스템을 개발한다. 프로브 카(prove Car)에 탑재하여 주행경로 상의 노면상태를 영상처리기 법을 활용하여 검지, 노면정보를 생성하는 시스템을 제 작하고 실 도로상에서 4개의 노면상태(마른 노면, 젖은 노면, 적설노면, 결빙노면)에 대한 검지 인식 성공률을 실험하여 방법론의 적정성 여부를 판단하였다.
2. 국내외 기술동향
본 연구에서 접근하고자 하는 이동체 기반 노면상태 정보수집에 대한 국내외 선행연구 개발사례를 검토하였 다. 김두규 외(2010)는 로봇의 이동성 향상을 위한 지면 마찰계수의 사전 추정 방법론을 개발하였다. 로봇 전면 부의 카메라로부터 취득되는 영상정보에서 물질 조성비 로 표현되는 정보를 추출, 마찰계수를 추정하는 방법론 을 고안하였다. Textron을 활용하여 질감을 판단한 후, 질감의 유사도 판별을 통해 지형 영상을 부분적으로 병 합하여 Segment를 생성한다. 총 6가지 물질(하늘, 흙, 작은 자갈, 나무, 아스팔트)를 활용하여 영상을 학습하 고, 영상을 통해 물질 조성비를 계산한 후 베이지안 분 류기를 활용하여 새로운 영상정보의 물질 조성비를 생 성, 마찰계수를 추정하였다. 추정된 마찰계수에 대한 평 가는 로드셀(Load cell)을 활용하여 직접 측정한 마찰 계수와 비교하였다. 테스트 결과 마찰계수 추정 오차율 이 4.1%로 기존 사전 추정방법(지형정보를 활용한 미끄 럼 추정방법)의 20% 대비 개선효과가 나타남을 확인하 였다.
동절기에 기온이 매우 낮고 적설량이 많은 북유럽의 경우 기상상황에 따라 변화하는 노면상태의 판별에 관 한 연구에 관심이 많다. 핀란드의 Maria Jokela 외 (2009)는 스테레오카메라(Stereo Camera)를 활용하 여 달리는 차량에서 노면상태를 실시간으로 판별하는 시스템에 대한 연구를 진행하였다. 고가의 레이저 기반 이동식 노면정보 검지센서를 대체하기 위하여, 빛의 편 광특성 및 조도(Graininess) 분석을 활용한 스테레오 영상 기반 차량 탑재형 시스템을 개발, 노면감시 목적으 로서의 활용 가능성을 확인하였다. IcOR 스테레오카메 라(640×480)에 노면상태 판별 알고리즘을 적용, 레이 저 기반의 고가장비(Vaisala DSC111)와 비교 및 평가 하였다. 그 결과 결빙영역감지에서 90% 이상의 정확도 가 확인되었다. 스웨덴의 Pa¨r Ekstro¨m 외(2008)는 IVSS(Intelligent Vehicle Safety Systems) 프로젝
Fig. 1 2018 Pyeongchang Winter Olympic Games
Transportation Plan
트의 일환으로 차량의 거동정보를 활용한 노면상태 판 정 방법론을 개발하였다. SRIS(Slippery Road Information System)으로 명명된 해당 방법론은 차량 에 내장되어 있는 거동과 관련된 시스템(ESP, ABS 등) 및 외부환경측정 센서(외기온도측정 센서, 와이퍼 가동 센서 등)을 활용하여 차량이 주행하는 지점의 환경 정보 및 이상거동발생 위치정보를 수집하였다. 이를 기상정 보 관측지점의 기상정보와 결합하여 도로 노면의 상태 를 총 5단계(미끄럼 없음, 강우, 차가운 노면 상 강우, 결빙, 서리에 의한 결빙)로 분리하는 기술을 개발하였 다. 시스템의 검증은 2007년과 2008년 사이 총 100대 의 프로브 카를 활용하여 진행하였으며, 시스템의 상용 화 가능성이 높은 것으로 나타났다.
한편 일본 홋카이도 한지토목연구소(CERI)에서는 CFT(Continuous Friction Tester)로 불리는 트레일러 와 유사한 형태의 장비를 도로유지관리에 활용하고 있다.
본래 CFT는 공항 활주로의 마찰력을 측정하는 장비이나, 홋카이도에서는 이를 주요 간선도로의 미끄럼 상태를 실 시간으로 취득하기 위하여 CFT를 도로관리차량 후면에 부착하여 활용 중이다. GPS센서를 활용하여 도로관리차 량이 달리는 지점의 위치정보를 취득, CFT에서 판별한 도로 상태정보와 함께 중앙의 관제소로 송신한다. 관제소 에서 근무하는 도로관리자는 이를 활용하여 특정 도로 지 역의 제설 필요 여부 등을 판별하는 데에 활용한다.
3. 시스템 개발
3.1. 이동식 노면정보 검지시스템 개념
본 연구에서는 영상처리기법을 활용하여 특정 지점이
아닌 도로 상 전 구간에 대한 노면상태 모니터링이 가능 한 프로브 카 기반 노면정보 검지시스템을 개발하였다.
관련 기술 개발동향을 검토하였을 때 영상처리에 의한 노면상태 판별방법론의 적용은 시스템 구축비용 및 시 스템 유지관리 측면에서 매우 유리한 것으로 판단된다.
즉, 범용적으로 활용 중인 일반 카메라를 활용하여 저비 용 시스템 구현이 가능하고, 소프트웨어가 중심이 되는 시스템으로 하드웨어 유지관리비용 지출을 최소화할 수 있다는 점이 큰 장점이다. 본 연구에서 개발한 이동식 노면정보 검지시스템은, 스테레오카메라를 활용하여 편 광영상을 취득, 편광영상에 대한 분석을 통해 노면을 총 4가지 상태(마름, 젖음, 적설, 결빙) 상태로 구분하는 시 스템이다. 즉 이론적으로는 핀란드의 Maria Jokela 외 (2009)에서 구현한 시스템과 유사하나, 판별과정에서 환경조건을 고려하는 등 보다 진보된 시스템이라 할 수 있다. 시스템에 대한 보다 자세한 설명을 위하여, 3.2절
‘알고리즘 소개’에서 본 시스템의 핵심인 영상처리를 활용한 노면상태 판별 알고리즘에 대해 소개한다. 그리 고 3.3절‘시스템 구성’에서 시스템을 구성하는 세부 하드웨어 요소 및 영상처리 알고리즘의 구현을 위해 적 용한 기술에 대해 설명한다.
Fig. 2 Prove Car based Mobile Road Detection System with Stereo Camera
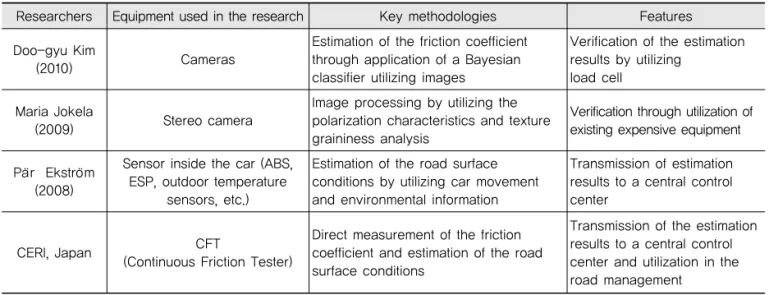
Table 1. The Literature Reviews about Road Surface Condition Mobile Detection
Researchers Equipment used in the research Key methodologies FeaturesDoo-gyu Kim
(2010) Cameras
Estimation of the friction coefficient through application of a Bayesian classifier utilizing images
Verification of the estimation results by utilizing
load cell
Maria Jokela
(2009) Stereo camera
Image processing by utilizing the polarization characteristics and texture graininess analysis
Verification through utilization of existing expensive equipment
Pa¨r Ekstro¨m (2008)
Sensor inside the car (ABS, ESP, outdoor temperature
sensors, etc.)
Estimation of the road surface conditions by utilizing car movement and environmental information
Transmission of estimation results to a central control center
CERI, Japan CFT
(Continuous Friction Tester)
Direct measurement of the friction coefficient and estimation of the road surface conditions
Transmission of the estimation results to a central control center and utilization in the road management
3.2. 알고리즘 소개
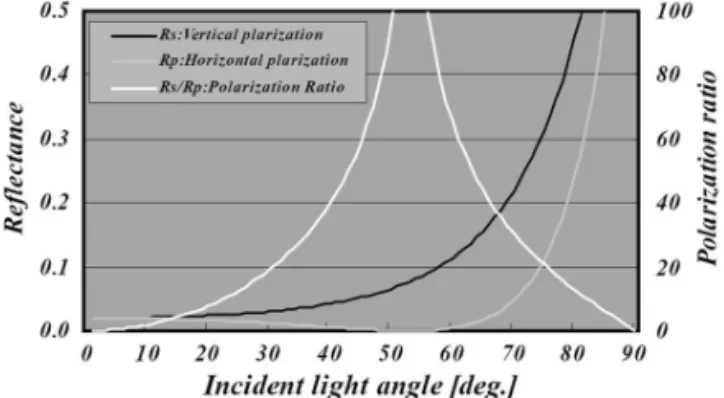
본 연구에서는 선행연구에 의해 개발된 영상처리를 활용한 노면상태 판별 알고리즘을 시스템 개발에 변조, 적용하였다. 크게 Yamada et al. (2003)이 제안한‘빛 의 편광(Polarization)’특성을 활용한 도로 상 젖은 부 분 판별 알고리즘 및 임성한 외(2007)의‘웨이블릿변환 을 활용한 노면상태 분류기준’으로, 본 연구에서는 상 기 알고리즘을 차량 이동조건 및 외부환경조건을 고려 하여 변조하여 적용한다. 먼저 Yamada 알고리즘의 원 리는 브루스터 각(Brewster Angle) 조건에서 특정 성 분으로 편광된 빛이 수면에 완전히 흡수된다는 성질을 활용, 수직편광영상과 수평편광영상 간의 밝기 비교를 통하여 도로 상 젖은 노면을 판별하는 것이다. Fig. 3에 나타난 것처럼 수직편광된 영상과 수평편광된 영상은 수면에 대한 입사각에 따라 밝기 차이가 발생하며, 수면 에 대한 브루스터 각인 입사각 53。(지면 대비 37。)에서 밝기 차이가 가장 크게 나타나는 것으로 확인, Yamada의 연구에서는 차량에 카메라를 부착하여 수직 /수평편광영상을 촬영한 후 영상의 밝기 차이를 확인하 는 영상처리를 통해 도로 상 젖은 부분을 판별하였다.
한편 임성한 외 (2007)는 상기 연구결과의 고도화 관 점에서, 웨이블릿 변환(Wavelet transform)을 활용한 질감분석을 추가하여 노면상태를 총 4단계(마름, 젖음, 적설, 결빙)로 판별하는 영상처리 알고리즘을 개발하였 다. 웨이블릿 변환은 하나의 영상을 그 영상을 담고 있 는 여러 개의 Sub-band 영상으로 분리할 수 있으며, 웨이블릿 변환으로 각 Sub-band를 합성하여 오차 없 이 원본영상을 분석할 수 있어 질감분석 솔루션으로 널 리 활용되고 있다. 상기 연구에서는 Haar 필터를 적용 하여 영상의 8×8픽셀에 대한 웨이블릿 계수를 산출한 후, 웨이블릿 패킷 변환 후 영상의 대각선에 해당되는 8
개의 블록에 대한 웨이블릿 계수를 K-means 클러스 터링 기법을 활용하여 4개의 클러스터로 분류한 후 영 상의 중심점을 각각의 노면상태에 대응하여 노면상태를 최종적으로 판정하였다.
K-Means 클러스터링 기법은 MacQueen에 의하여 제안된 알고리즘으로, 우선 패턴을 k개의 군집으로 나 눈 후 군집에 포함되어 있는 패턴들의 평균을 클러스터 의 중심값으로 계산한다. 클러스터의 중심값과 각 패턴 과의 거리를 계산한 후 가장 거리가 가까운 클러스터에 패턴을 포함시키는 방법으로 조건은 다음의 Eq. (1)과 같다(이성규 외, 2006)
여기서, 이며, 은 패턴 수,
는 군집 수, 는 군집의 중십값을 나타내며 크게 다음 과 같은 두 가지 절차를 따르고 있다. 첫째는 초기 군집 의 수 를 규정하여 결정된 초기 군집에 각 개체들을 할당하는 것이며, 둘째는 군집의 일부 개체들 또는 전체 를 기준에 따라 최적분리에 이를 때까지 해당하는 규칙 에 재할당 하는 것이다. 이 기법을 사용하기 위해 우선 군집 중심의 초기값(initial seed)을 찾아야 하는데, 일 반적으로 이것은 개의 변수로 기술되는 개의 자료 에 대해 행렬을 구성한 후, -차원(variable) 공간에서 주어진 군집의 개수와 같은 개의 점을 선택함으로서 시작된다. 이렇게 군집 중심의 초기값이 결정되면 다음 단계로 각 개체는 적절한 근접도(proximity measure) 에 근거하여 개의 초기중심에 가장 가까운 군집에 할 당하고, 그 군집의 중심은 추가적으로 할당된 구성원에 의해 다시 계산된다. 이러한 할당과정은 반복되며 군집 내의 흐트러짐이 큰 군집은 다시 분리되고, 작은 군집들 은 서로 병합되는 형식으로 진행된다. 요약하면 다음과 5단계와 같다.
(1) 주어진 표본에서 처음 개의 개체들을 초기 개 군집의 중심으로 선택
(2) 임의로 개의 점들을 선정하여 초기 값으로 사용 (3) 개의 초기 중심점 선택
(4) 각 개체를 가장 가까운 중심점을 갖는 군집으로 할당한 후 새로운 군집의 중심점 계산
(5) 각 개체의 할당에 변화가 없을 때까지 위의 단계 를 반복하여 최종적으로 개의 군집 형성
Fig. 3 Reflectance Curve about Incident Polarization in The Water
(1)
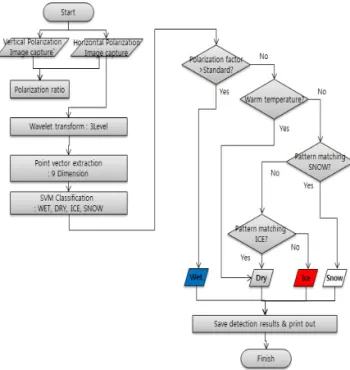
본 연구에서는 상기 임성한 외(2007)의 영상처리 알고 리즘을 바탕으로, 영상처리에 의존하였을 때 발생할 수 있는 오검지를 최소화시키기 위하여 노면 온도센서에서 측정된 온도값을 추가적인 판별기준으로 설정한다. 그리 고 K-means 클러스터링 기법을 적용함에 있어 젖은 노 면의 편광특성이 잘 반영되도록 편광계수를 분류기준으 로 추가, 총 9차원(편광계수 및 대각선 성분 8개의 웨이 블릿 계수)으로 구성된 특징벡터를 활용하였다.
아래 Table 2는 본 연구에서 활용한 노면상태 판별기 준으로서, 적설노면 및 결빙노면은 노면온도가 영하로 체크되었을 때에만 발생하는 것을 가정하여 기준을 설 계한다.
본 시스템 개발에 적용한 영상처리과정을 정리하면 Fig. 5의 Flow chart로 나타낼 수 있다.
3.3. 시스템 구성
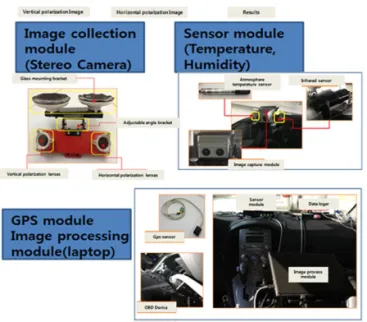
3.2 절에서 소개한 영상처리 알고리즘을 프로브 카 주행환경에서 구동시키기 위한 시스템을 설계, 제작하 였다. 앞서 영상처리과정을 설명함에 있어‘수평편광영 상’과‘수직편광영상’의 동일지점/동시촬영이 필요함 을 확인하였다. 달리는 차량에서 이를 수행하기 위하여, 스테레오카메라를 활용한 영상수집부를 설계₩제작하였 다. 본래 스테레오카메라는 영상처리를 활용한 거리측 정의 용도로 활용되나, 본 연구에서는 동시에 두 개의 동기화된 영상을 취득할 수 있다는 점에서 스테레오카 메라를 영상촬영 모듈로 선택, 렌즈 전면부에 수직/수 평 편광필터를 부착하여 영상수집부를 구현하였다. 한 편 영상의 촬영위치를 저장하기 위하여 GPS 모듈을 부 착하였으며, 외부환경정보(온도 및 습도정보)를 노면상 태 판별에 활용하고자 비 접촉식 온도센서(노면온도 측
Fig. 4 Classification Process Using K-means Clustering
Road surface conditions Polarization properties Temperature Wavelet characteristics Dry surface Polarization coefficient ≤
reference value Normal temperature Relatively higher high-frequency components
Wet surface Polarization coefficient
reference value Normal temperature -
Snowy surface Polarization coefficient ≤
reference value Below zero Very large DC component, and almost no remaining components
Icy surface Polarization coefficient ≤
reference value Above zero Relatively even distribution of high-frequency components
Table 2. Road Surface Classification
Fig 5. Algorithm Flow Chart of Road Surface Determine Image Processing
Iteration 1 Iteration 2
Iteration 3 Iteration4
x1 x1
x1 x1
x2 x2x2
x2
정) 및 대기 온습도센서(대기온도 및 습도측정)를 시스 템 구성에 추가하였다. 한편 차량의 거동정보 및 외기 온도 정보 등을 차량 단에서 추출할 수 있을 것으로 판 단하여 ECU(Electronic Control Unit)와의 연결을 차량의 OBD-Ⅱ 단자를 활용하여 시도하였으나, OBD-Ⅱ 단계의 보안수준에서는 활용가능한 변수의 숫자가 한정되어 실제 노면상태 판별과정에는 이를 활 용하지 않았다. 본 연구에서 활용할 시스템은 다음의 Fig. 6과 같다.
영상처리 알고리즘 구동 및 전체 시스템의 제어는 영 상처리모듈(노트북)에 설치된 전용 프로그램에 의해 이 뤄진다. 카메라 제어기능 구현에 있어, 날씨 및 시간에 따라 변하는 영상의 밝기 조절을 위한 제어기능을 구현 하였다. 제어의 요소는 자동노출제어 On/Off, 셔터 노 출시간 제어, RGB 이득제어, 좌₩우측 카메라간 밝기 동기화이다. 한편 스테레오 카메라 좌₩우측 영상간 촬 영위치 불일치(스테레오카메라의 Baseline이 떨어져 있어 필연적으로 발생)를 보정하기 위하여 영상처리과 정에서 물리적으로 영상을 이동시켜 일치시키는 스테 레오 정합기능을 구현하였다. 한편 운영 프로그램에서, 관심영역(ROI : Region of Interest)를 설정하여 취
득영상 중 특정부분에 대해서만 결과를 확인할 수 있 도록 프로그램을 설계하였다. 이를 통해 차량 주행 중 에 도로가 아닌 영역을 피하여 감시영역을 설정할 수 있다.
4. 시스템 설치 및 평가 4.1. 영상수집부 시공위치 선정
프로브 카에 장비를 장착함에 있어, 가장 면밀한 검토 가 필요한 부분이 바로 영상수집부의 시공위치 선정이 다. 악천후 시 도로상황에서 영상을 수집하여야 하는 영 상수집부는 선명한 도로 영상을 취득할 수 있어야 할 뿐 아니라, 렌즈부 등 기구가 악천후 환경에 노출되어도 충 분한 수집성능을 나타내어야 한다. 본 연구에서는 영상 수집부의 거치위치를 선정하기 위하여, 영상수집부를 차량 실내(차내 룸 미러 부분) 및 실외(차량 지붕 부분) 에 거치하여 영상을 수집₩분석하였다. 분석결과는 다음 Fig. 8, 9와 같다.
Fig. 6 System Configuration
Fig. 7 ROI Setting for Stereo Camera
Fig. 8 Distribution of Polarization Ratio (Mount Location : Interior)
Fig. 9 Distribution of Polarization Ratio
(Mount location : Exterior)
Fig. 8에서 확인할 수 있듯이, 영상수집부를 실내에 설치한 경우 차량 전면유리의 영향으로 인하여 편광계 수값이 극히 떨어져 빛의 편광특성을 활용할 수 없으며, 특히 유리창의 난반사로 인하여 수집영상의 품질이 떨 어짐을 확인, 영상처리에 적용하기 어려움을 확인하였 다. 반면 영상수집부를 차량 외부에 거치하였을 때에는 편광계수값이 정상적으로 취득되며 화질 역시 영상처리 에 적용하기 충분한 품질로 획득됨을 확인하였다. 이는 Maria Jokela 외(2009)의 장비 개발 사례에서 스테레 오카메라를 차량 실내에 부착하여 테스트를 진행했던 것과 차별점을 가진다. 영상수집부를 실외 환경에서 운 용하는 것으로 결론을 내린 것과 관련하여, 실외 환경에 서 장비의 안정적인 작동을 위하여 영상수집부를 밀폐 형 방수케이스에 담고 렌즈 접촉부를 UV필터로 마감하 였다. 그리고 거치대에 흡착판을 총 4개 설치, 진동에 의한 영향을 최소화할 수 있도록 하였다. 장비의 설치조 건은 앞서 설명한 브루스터 각 조건을 최대한 만족시키 는 범위에서, 차량 전면부 보닛과의 간섭을 최소화시킬 수 있도록 결정하였다.
한편 테스트에 활용한 프로브 카의 차종은 상용차량 (버스, 트럭 등)과 조건이 유사한 현대자동차의 그랜드스 타렉스로 선정하였다. 다음 Fig. 10은 영상수집부 모듈 의 설치조건을 나타낸 그림으로, 가장 정확한 감시가 이 루어지는 부분은 장비 시공위치 전방 약 5.5m이며 렌즈 의 화각(60。핀홀 렌즈 활용)을 고려하였을 때 차량 전방 약 10m 지점까지 감시가 가능함을 확인할 수 있다.
4.2. 1차 현장 테스트
프로브 카에 설치한 시스템을 활용하여 알고리즘의 원 활한 구동 여부를 확인하기 위한 1차 현장테스트를 수행 하였다. 1차 테스트에서는 차량이 달리는 환경에서 마른 노면과 젖은 노면이 명확히 구분되는가에 대한 테스트를
중점적으로 수행하였다. 2012년 11월 수행한 1차 테스트 에서는, 프로브 카의 속도를 최대 50km/h까지 높여가며 테스트를 수행하였다. 테스트 결과, 주행환경에서도 편 광의 차이에 의한 젖은 노면 검지 알고리즘은 원활히 수 행됨을 확인하였다. 다만 주행속도가 빨라짐에 따라 영 상의 번짐(Blur)현상이 커지고, 수집주기(1초)의 한계로 젖은 노면 재현구간에서 영상을 수집하지 못하여 노면상 태를 검지하지 못하는 사례가 발생하였다(Fig. 12, 13 참 조). 주행속도에 따른 관심영역 상 편광계수의 변화는 미 미한 것으로 나타나, 장비의 검지성능은 카메라의 셔터 스피드 성능에 좌우됨을 확인할 수 있었다.
한편 적설 및 결빙조건에 대해서는 테스트 수행시기 에 강설이 이뤄지지 않아, 2012년 12월에 추가적으로
Fig. 10 Installation Point Conception of Image
Acquisition Module
Fig. 11 Test on the Road
Fig. 12 Detecting Screen on Wet Road Surface(0km/h)
Fig. 13 Detecting Screen on Wet Road Surface(50km/h)
Fig. 14 Detecting Screen on Wet Road Surface(30km/h)
테스트를 수행하였다. 다만 테스트 여건 상 주행공간이 확보되지 않아, 정지상태에 대해서만 테스트를 진행하 였다. 테스트의 목적은 영상처리 알고리즘 중 웨이블릿 변환을 활용한 마른/적설/결빙노면 판별 알고리즘의 판 별력을 확인하기 위함이며 육안으로 적설 및 결빙이 확 인된 노면에 대하여 시스템을 활용한 영상처리를 수행 하여 결과를 비교하였다. Fig. 15는 육안으로 적설노면 임을 확인할 수 있는 노면에 대하여 영상처리를 수행한 결과이다. 대부분의 ROI에 대하여 적설영역으로 정상 적으로 판정되었음을 확인할 수 있다. 다만 일부 픽셀 단위로 젖은 영역이 검지됨을 확인할 수 있었는데, 이는 부분적인 융설 또는 스테레오 영상의 정합과정에서 발 생한 오류로 판단된다.
Fig. 16은 육안으로 결빙노면임을 확인할 수 있는 노 면에 대하여 영상처리를 수행한 결과이다. 결빙의 흔적 이 뚜렷한 ROI 좌측 하단부의 상당부분이 결빙영역으 로 판별되었으며, 햇빛에 의하여 융해된 부분은 젖은 영 역으로 판별됨을 확인할 수 있다.
테스트 결과 시스템의 활용도가 높은 것으로 판단, 다 양한 노면조건이 존재하는 동절기 도로 상 주행환경에 대해 시스템 검증 수행계획을 수립하였다.
4.3. 2차 현장 테스트 수행 및 검토
적설 및 결빙노면이 존재하는 동절기 조건의 실 도로 에 대한 테스트는 2013년 2월 한국건설기술연구원 내 도로에서 수행하였다. 도로환경 및 차량의 안전을 고려
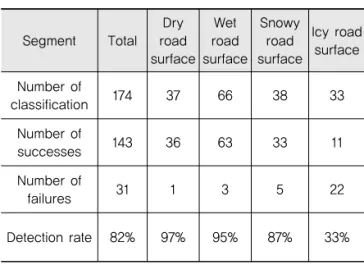
하여 최고 운행속도는 30km/h로 제한하였으며, 총 174 개의 영상 샘플을 취득하였다. 테스트 결과 마른, 젖은 노면의 경우 95% 이상, 적설노면의 경우 87% 이상의 검지성공률을 보이고 있지만, 결빙노면의 경우 30%대 의 낮은 검지성공률을 나타내었다.
상기 결과를 확인하였을 때, 시스템의 완성도를 향상 시키기 위하여 결빙노면에 대한 검지율 향상이 반드시 필요함을 확인하였다. 영상처리 알고리즘 상 결빙노면 은 질감분석에 의해 구분되며, 빙판의 매끈한 질감을 활 용하여(웨이블릿 계수 특성 상 주파수 분포가 고름) 분 류가 이뤄지는 것으로 구성되어 있다. 하지만 실 도로 상 발생되는 결빙노면에서는 이와 같은 특성이 잘 나타 나지 않는 결빙노면의 경우가 많다. 한편 결빙노면은 육 안으로도 즉각적인 판별이 어려운 경우가 많아 향후 영 상처리 알고리즘의 수정 및 보완 시 이에 대한 중점적인 검토가 필요함을 확인하였다.
5. 결론 및 향후 연구방향
본 연구에서는 도로의 지능화를 통한 교통사고 절감 및 도로관리역량 고도화의 일환으로 노면정보 수집 및 분석에 주목하여 도로 구간 단위의 노면상태검지를 위하 여 스테레오카메라 기반 이동식 노면정보검지시스템을 개발 및 평가하였으며 결과를 요약하면 다음과 같다.
1. 스테레오카메라 기반 영상수집부에서 취득한 영상정 보를 1) 편광계수, 2) 밝기 성분, 3) 주파수성분 등에 대하여 K-Means Clustering기법을 이용, 4가지 노면상태(마른, 젖은, 적설, 결빙)의 패턴을 매칭하여 분류하였으며, 이를 실 도로환경에서 다양한 조건으
Fig. 15 Detecting Screen on Snow Road Surface
Fig. 16 Detecting Screen on Ice Road Surface
Table 3. Field Test Result
Segment Total Dry road surface
Wet road surface
Snowy road surface
Icy road surface
Number of
classification 174 37 66 38 33
Number of
successes 143 36 63 33 11
Number of
failures 31 1 3 5 22
Detection rate 82% 97% 95% 87% 33%
로 테스트한 결과 수직₩수평편광에 따른 편광계수를 통해 젖은 노면과 마른 노면 및 적설노면을 구별할 수 있었으나 결빙노면의 인식성공률이 상대적으로 저조함을 확인하였다.
2. 이처럼 인식 성공률이 저조한 결빙노면의 검지율 향 상을 위한 방안으로, 영상처리과정에서의 보다 정확 한 Phase분석이 필요할 것으로 보인다. 영상획득 시 날씨나 주위 밝기에 따른 카메라 Gain을 자동설정으 로 주기적으로 동기화 시키지 않으면 편광계수 값의 변화가 크게 나타나며, 햇빛을 등지고 촬영했을 경우 와 마주보고 촬영했을 경우 45。각도의 경우 각각 편 광계수의 값이 변동이 생긴다. 한편 그림자의 경우 나 뭇가지나 전선 등에 의해 가늘게 생긴 영역에 대해서 는 상대적인 밝기 차로 인해 편광계수가 높게 나오는 현상도 발견되었다.
3. 본 연구의 한계 극복 및 기존 편광계수 특징의 고도 화를 위하여, 현재의 0。, 90。인 2상의 스테레오카메 라 편광영상을 0。, 45。, 90。의 3상 영상으로 시스템 개발 및 구축 후, 정합 및 위상분석을 통해 좀더 다양 한 환경에서도 보다 정확한 검지가 되도록 연구가 필 요하다고 여겨진다.
감사의 글
본 연구는 한국건설기술연구원 연구과제“주요사업(차세대
도로교통정보 서비스 고도화 기술 개발)” 의 연구비 지원에
의해 수행되었으며, 이에 감사드립니다.
References
The Korea Transport Institute, 2011. “Transport Countermeasure Strategies for the PyeongChang Winter Olympic Games ”.
Doo-gyu Kim, Ja-young Kim, Jihong Lee, Dong-Geol Choi, and In- So Kweon, “Utilizing Visual Information for Non-contact Predicting Method of Friction Coefficient”, Journal of the Institute of Electronics Engineers of Korea SP, Vol. 47 No.4.
pp. 399~405, 2010.
Maria Jokela, Matti Kutila and Long Le, “Road Condition Monitoring System Based on a Stereo Camera ”, Intelligent Computer Communication and Processing, IEEE 5th International Conference on. pp 423~428 , 2009.
Per-Olof Sjo¨lander, Swedish Road Administration, “SRIS-Slippery Road Information System”, IVSS Project Report, December 2008.
Roberto A. Tokunaga, “Winter Road Management using Friction Testing ”, 1st KICT-CERI Joint Seminar for Winter Road Maintenance, Sep 2011.
Muneo Yamada, Toshihiro Oshima, Koji Udea, Isao Horiba and Shin Yamamoto, “A study of the road surface condition detection technique for deployment on a vehicle”,JSAE Review 24, pp. 183~188, 2003.
Lim, Sung Han, Ryu, Seung Ki and Yoon, Yeo Hwan, “Image Recognition of Road Surface Conditions using Polarization and Wavelet Transform”, Journal of the Korans Society of Civil Engineers, Vol. 27, No. 4D, pp. 471~477, 2007.
Han, Tae-Hwan, Ryu, Seung-Ki, “ The Recognition and Segmentation of the Road Surface State using Wavelet Image Processing”, Journal of the Korean Institute of Illuminating and Electrical Installation Engineers, Vol. 22, No. 4, pp. 26~34, 2008.
Seong-Kyu Yi, Sung-Eon Hong, and Soo-Hong Park, “A Similar Price Zone Determination of Public Land Price Using a Hybrid Clustering Technique”, Journal of korean Geographical society, Vol. 41, No. 1, pp. 121~135, 2006
( 접수일 : 2013. 6. 18 / 심사일 : 2013. 6. 21 / 심사완료일 : 2013. 9. 23 )