https://doi.org/10.7236/JIIBC.2017.17.2.173
JIIBC 2017-2-25
이족보행 휴머노이드 로봇의 개발과 보행패턴 생성
Development and Walking Pattern Generation of Biped Humanoid Robot
최인수*, 이승정*, 서용호**
Insoo Choi*, Seung Jeong Lee*, Yong-Ho Seo**
요 약 과거부터 로봇의 실생활 활용에 관한 연구가 지속됨에 따라 현대사회에서 이전까지의 실험 환경에서 벗어나 사회 각 분야로의 진출이 지속적으로 시도 되고 있다. 하지만 로봇이 실제 환경에 적용되기 위해서 기존의 로봇 플랫 폼 상용화의 가장 큰 단점으로 꼽히는 생산 비용과 인간 기준의 작업환경에서의 적응성 문제가 선결되어야 한다. 본 논문에서는 사람의 자유도와 크기를 따르는 이족보행 형태의 로봇을 제안하였으며, 엔코더를 포텐셔미터 접목모듈로 대 체하여 높은 생산 단가를 절감하고, 파트 교체가 쉬운 모듈형 설계를 채택하여 로봇의 유지 보수비용을 절감 하였다.
최종적으로 크기와 모터의 배열이 다른 두 가지의 더미로봇에 보행패턴을 적용하여 안정성을 검증하였고, 본 논문에서 는 제작된 실제 로봇들을 이용한 보행 패턴을 적용 및 보행 실험을 통하여 제안한 이족보행 로봇 적용가능성을 검증하 였다.
Abstract As research on the practical use of robots has continued since the past, advancements into each field of society are being continuously tried in modern society, breaking bounds from the previous experimental environment. However, in order for robots to be applied to the real environment, the production cost, which is considered to be the biggest disadvantage of commercializing the existing robot platform, and the adaptability issue in working environments in terms of human standards must be considered. This paper proposes a robot of biped walking form, which conforms to the degree of freedom and the size of human beings. By replacing the encoder with a combined module of potentiometer, the high cost of production is reduced, and by adopting a modular design that is easy to replace parts, the maintenance cost of robots is reduced. Finally, stability was verified by applying a walking pattern to two dummy robots of different sizes and motor arrangements. In this paper, after developing the real biped walking robots, the performance and usability were verified through walking experiments and applying the walking pattern using the developed robots.
Key Words : Humanoid Robot, Biped Walking Trajectory, Walking Pattern Generation
*준회원, 목원대학교 IT공학과
**종신회원, 목원대학교 지능로봇공학과 (교신저자) 접수일자 2017년 1월 26일, 수정완료 2017년 3월 7일 게재확정일자 2017년 4월 7일
Received: 26 January, 2017 / Revised: 7 March, 2017 / Accepted: 7 April, 2017
**Corresponding Author: [email protected]
Dept of Intelligent Robot Engineering, Mokwon University, Korea
Ⅰ. 서 론
단순노동과 위험요소가 포함된 일을 로봇으로 대체하
기 위한 연구는 로봇의 주요 응용분야 중 하나로 과거로 부터 꾸준히 진행되어왔으며, 현재에 이르러서는 이전까 지의 실험 환경에서 벗어나 사회 각 분야로의 진출이 시
도되고 있는 상태이다[1]. 로봇이 실생활로의 진출이 성공 적으로 이루어지려면 사람을 기준으로 디자인되어있는 작업 환경에서 사람 눈높이의 문을 열거나 물건을 자유 롭게 사용하는 등, 사람과 협업이 가능한 협업 중심의 로 봇 구현이 선결되어야 할 과제이다[2,3]. 또한 이족보행 로 봇 제어에 따른 안정성 확보는 유지 보수의 가격 절감에 직결되어 있어 매우 중요하다.
본 논문에서는 이족보행 로봇의 상용화의 장애 요소 인 높은 생산단가를 절감하기 위한 방법으로 엔코더를 포텐셔미터 접목 모듈로 대체하는 방법을 제안하였으며, 고가의 하모닉 드라이브를 유성감속기로 대체하였다. 또 한 유지 보수에서 발생하는 비용을 절감하기 위해 모듈 형으로 설계하였다. 이를 바탕으로 제안한 로봇에 적용 하기 전에 크기와 모터의 배열이 다른 두 가지의 더미로 봇에 실험하였으며 최종적으로 제안한 이족보행 로봇을 제작하여 생성된 보행패턴 궤적을 적용 및 보행 실험을 통하여 이족보행 로봇의 생산 단가 절감을 통한 보급화 가능성을 검증하였다.
Ⅱ. 이족보행 로봇의 설계 및 제작
본 논문에서는 이족보행 로봇의 보급화 가능성을 검 증하기 위한 방법 중 하나로 기존 고가의 장비들을 상대 적으로 저가인 장비로 대체 하는 방법을 제안하였다. 기 존 이족보행에 사용되는 엔코더와 하모닉드라이브를 포 텐셔미터와 유성감속기로 포텐셔미터 접목 모듈을 설계 하여 사용하였다. 이때 모터를 사용한 로봇들의 공통적 인 하드웨어 문제인 백래쉬(Backlash)가 증가하는 현상 이 나타났으나 제어 과정에서 오차 범위로 감안하였다.
또한 설계 메커니즘을 모듈형으로 채택하여 유지보수의 편의성을 보장하였으며, 유지보수에서 발생하는 비용을 절감하도록 하였다. 표 1은 제안한 기존 장비의 대체 방 법을 나타낸다.
표 1. 제안된 대체 방법
Table 1. Suggested alternate method
기존 방식 제안된 방식
회전측정
센서 엔코더 포텐셔미터
감속기 하모닉 드라이브 유성 감속기
설계 메커니즘 일체형 모듈형
1. 포텐셔미터 접목 모듈
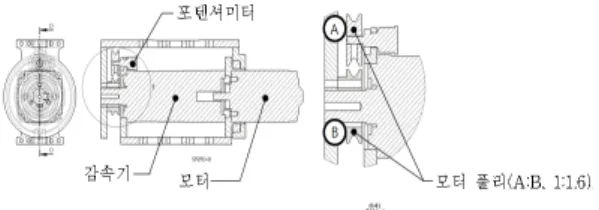
이족보행 로봇의 보행 및 동작 제어를 위해서는 모터 의 정확한 각도 추정이 필요한데, 이를 위해서는 모터의 현재 각도를 정확히 측정해야한다. 본 논문에서는 모터 의 현재 각도를 측정하기 위해 모터와 포텐셔미터 축을 벨트풀리로 연결하여 동력을 전달하도록 설계하였다. 그 림 1은 설계된 포텐셔미터 접목 모듈의 단면도이다. A를 중동축으로 포텐셔미터의 축, B를 원동축으로 모터의 축 으로 두 축은 수평으로 놓여있다. 또한 포텐셔미터의 최 대 측정 각도는 324°±5°로 벨트풀리의 비율을 1:1.6으로 설계하여 최대 205도의 모터각도를 측정 할 수 있도록 하 였다.
그림 1. 포텐셔미터 접목 모듈 설계 단면도
Fig. 1. Cross section of potentiometer grafted module
2. 모듈형 설계
인간의 크기와 자유도를 따르는 이족보행 로봇은 구 조적 특성상 동작 도중에 외란으로 인해 넘어지는 상황 이 발생한다. 이와 같이 파손이 발생한 파트는 교체 혹은 수리를 해야 한다. 본 논문에서 제안한 모듈 형태의 구조 는 주로 소형 로봇에서 채택하는 구조이며, 로봇의 유지 보수가 용이하다는 장점을 가지고 있다. 제안한 모듈 형 태의 조인트(Joint)와 링크(Link)는 그림 2와 같다.
그림 2. 관절(Joint)와 관절(Link) 모듈의 전개도 Fig. 2. Joint and link module explosion diagram
3. 관절의 각도
제안된 이족보행 로봇의 구조는 무게 중심을 고려하 여 하체의 높이가 811mm로 상체를 포함할 경우 전신의 높이가 1200mm이하가 되도록 하였으며, 상체 대비 하체
의 비율을 1:2 이하로 설계하였다[4]. 또한 배터리를 포함 한 이족보행 로봇의 전체 무게는 21kg으로 설계하였다.
그림 3은 전체 설계도를 보여주며, 그림 4는 실제 제작된 이족보행 로봇의 외형을 보여준다.
그림 3. 이족보행 로봇의 하체 설계도 Fig. 3. Drawings of biped robot
그림 4. 실제 외형
Fig. 4. Robot Appearance
Ⅲ. 이족보행 로봇의 제어
본 논문에서 제안한 이족보행 로봇의 시스템 구성은 그림 5와 같다.
그림 5. 이족보행 로봇의 시스템 블록선도 Fig. 5. System block diagram of biped robot
1. 포텐셔미터 접목 모듈 관절의 PID제어 이족보행 로봇이 동작할 때 각 관절의 모터가 목표위 치로 도달 하는 것은 로봇 안정성에 직접적인 영향을 미 친다. 따라서 본 논문에서는 포텐셔미터 접목 모듈의 관 절 각도와 모터제어의 빠른 응답성 및 안전성을 보장하 기 위해 식 1을 사용하여 PID제어기를 구현하고 게인 튜 닝 된 제어값(MV: manipulated variable)을 적용 하였다.
(1)
2. 관절의 각도
보행 패턴을 생성하기 전에 제안된 이족보행 로봇의 관절 각도는 로봇의 정면(Frontal Plane)과 측면(Sagittal Plane)으로 구분하여 계산하였다. 그림 6은 로봇 관절의 상관관계를 나타낸다[5].
그림 6. 관절각도 Fig. 6. Joint angle
그림 6에서 엉덩이(Hip), 무릎(Knee), 발목(Ankle),의 각도는 아래의 식 2~5와 같다.
(2)
(3)
(4)
또한 는 식 5와 같다.
(5)
3. 보행패턴 생성
이족보행 로봇의 보행 궤적은 두발이 땅에 닿아있는 경우(Double Support)와 한발이 땅에 닿아있는 경우
(Single Support)로 나누어진다. 이때, 관절의 각도와 마 찬가지로 평면을 구분하여 코사인 인터폴레이션을 사용 하여 패턴을 생성해 주었다[6]. 로봇 전진 보행은 X-Z평 면만을 고려하였고 한 스텝을 내딛는데 필요한 시간을 Tc, 한 스텝의 보폭을 Ds, 두발이 바닥에 닿아 있는 시간 을 Td라고 할 때 허리 궤적은 식 6과 같다.
(6)
또한, 발이 올라가있는 최고의 높이를 Hao 이동거리 를 Lao라고 할 때 발목의 궤적은 식 7과 같다.
(7)
시간을 기준으로 계산된 전체 보행궤적은 그림 7과 같다.
그림 7. 보행궤적
Fig. 7. Walking trajectory
4. 능동적 안정화
이족보행 로봇은 동작하고 있을 때 외란에 대해서 취 약하다. 때문에 외란에 대해 로봇의 안정성을 센서데이 터와 ZMP(Zero Movement Point)를 사용하여 보장해야 한다. 일반적으로 ZMP는 목표궤적이 필요하며 발의 중 심에 오는 것이 가장 안정된 상태이다. 이족보행 로봇에 적용한 ZMP에 대한 수식은 식 8과 같다.
(8)
Ⅳ. 실험 및 결과
생성된 보행패턴을 본 논문에 제안한 이족보행 로봇 에 적용하기에 앞서 2가지 이종 더미(Dummy)로봇을 이 용하여 사전 검증을 진행하였다. 다음 그림 7은 실험에 사용된 로봇의 종류를 나타낸다. 이때 왼쪽부터 허리와 발목의 Roll과 Pitch 모터가 동축 선상에 있어 일반적인 이족보행 로봇의 구조를 따르는 219mm인 더미, 최종적 으로 검증해야 하는 로봇과 모터의 배치가 같은 250mm 크기의 더미, 마지막으로 본 논문에서 제안한 811mm의 로봇이다.
그림 7. 로봇의 종류 Fig. 7. Type of robots
생성된 보행패턴을 그림 7의 2가지(219mm, 250mm) 종류의 더미로봇에 대하여 실험을 적용하였다. 그림 8과 그림 9는 로봇이 전진 보행을 도식화 하였다. 이때 L과 R은 다리의 왼쪽과 오른쪽을 나타내고, θ_1에서 θ_5는 로봇의 회전을 결정하는 골반의 Yaw를 제외한 골반에서 발목까지의 각도 5개를 나타낸다.
그림 8. 더미(219mm)의 전진 보행
Fig. 8. Forward walking using dummy(219mm)
그림 9. 더미(250mm)의 전진 보행
Fig. 9. Forward walking using dummy(250mm)
크기와 모터의 배치가 다른 이종의 더미로봇의 보행 실험을 통하여 최종적으로 적용해야 하는 로봇의 안정성 확보와 보행 가능성을 검증하였다. 최종적으로 본 논문 에서 제안한 크기 811mm의 로봇 모델에 보행패턴을 적 용하여 제자리, 전진 보행 실험을 진행하였다. 또한 로봇 의 무게중심을 상체 없이 쉽게 이동시키기 위해 Y-Z평 면에서 공중에 떠있는 발의 골반과 발목의 각도를 기존 보다 2배하여 실험하였다. 다음의 그림 10은 제자리 보행 을 나타낸다. 제자리 보행을 통해 안정성이 검증된 보행 패턴에 전진 보행을 적용하였다. 그림 11은 제안한 로봇 의 전진 보행에 따른 각 관절의 각도변화를, 그림 12는 제안한 로봇의 전진 보행을 나타낸다.
그림 10. 제자리 보행에 따른 로봇의 각도변화 Fig. 10. Value of standstill walking using robot
그림 11. 전진 보행에 따른 로봇(811mm)의 각도변화 Fig. 11. Value of forward walking using robot(219mm)
그림 12. 로봇의 전진 보행
Fig. 12. Forward walking using robot
Ⅴ. 결 론
본 논문에서는 사람의 자유도와 크기를 따르는 이족 보행 로봇의 보급화 가능성을 검증하기 위해 유지보수가 용이하고 구조를 단순화한 모듈형 이족보행 로봇 플랫폼 을 제안하였다. 또한 기존 이족보행로봇에 사용되는 고 가의 장비를 국산 감속기, 모터, 포텐셔미터 등, 비교적 저가의 장비로 대체하여 기존 이족보행 로봇의 보급화를 가로막는 가장 큰 요인 중 하나인 생산비용을 절감하는 방법을 제안하였다. 최종적으로 제안한 이족보행 로봇을 구현하였으며, PID제어와 보간법을 사용하여 보행패턴 생성 및 보행 실험을 하였다. 실험은 이종 2개의 더미로 봇을 이용하여 사전 검증 이후에 진행되었으며, 실험을 통하여 본 논문에서 제안한 방법론의 보행 가능성을 확 인하였다. 하지만 모터와 포텐셔미터를 연결하는 벨트풀 리가 기존에 감안하였던 오차 범위의 백래쉬 보다 1도 더 발생하여 Y축으로 충분히 다리를 벌리고 있지 않으면 각 관절에 간섭이 발생하여 자세와 안정성을 보장받지 못하
는 요소로 작용하는 것을 확인할 수 있었다. 따라서 이와 같은 단점을 보완하기 위해 포텐셔미터 접목모듈에 사용 된 벨트풀리를 타이밍벨트로 교체하고, 불규칙한 지형의 보행 안정성 확보를 위해 지면 접촉여부를 판단하는 고 가의 센서를 대체할 방법에 대한 지속적인 연구가 필요 하다.
References
[1] Yang, Hyun S., et al. "Design and development of biped humanoid robot, AMI2, for social interaction with humans." Humanoid Robots, 2006 6th IEEE-RAS International Conference on. IEEE, 2006.
DOI: https://doi.org/10.1109/ICHR.2004.1442679 [2] Koolen, Twan, et al. "Design of a
momentum-based control framework and application to the humanoid robot atlas."
International Journal of Humanoid Robotics 13.01 (2016): 1650007.
DOI: https://doi.org/10.1142/S0219843616500079 [3] Kaneko, Kenji, et al. "Humanoid robot HRP-2Kai
—Improvement of HRP-2 towards disaster response tasks." Humanoid Robots (Humanoids), 2015 IEEE-RAS 15th International Conference on.
IEEE, 2015.
DOI: https://doi.org/10.1109/HUMANOIDS.2015.
7363526
[4] Seo, Yong-Ho, Il-Woong Jeong, and Hyun S.
Yang. "Motion capture-based wearable interaction system and its application to a humanoid robot, AMIO." Advanced Robotics 21.15 (2007):
1725-1741.
DOI: https://doi.org/10.1163/156855307782506138 [5] Yi, Seung-Joon, et al. "Online learning of a full
body push recovery controller for omnidirectional walking." Humanoid Robots (Humanoids), 2011 11th IEEE-RAS International Conference on.
IEEE, 2011.
DOI: https://doi.org/10.1109/Humanoids.2011.6100896
[6] Tae-Woo Han, Yong-Ho Seo, “Emergency Situation Detection using Images from Surveillance Camera and Mobile Robot Tracking System”, The Journal of The Institute of Internet, Broadcasting and Communication, Vol. 9, No. 5, 2009.
저자 소개
최 인 수(준회원)
∙2015년 : 목원대학교 지능로봇공학과 (공학사)
∙2016년 : 목원대학교 IT공학과(공학 석사)
<주관심분야 : 휴머노이드, 지능로봇>
이 승 정(준회원)
∙2015년 : 목원대학교 지능로봇공학과 (공학사)
∙2015년∼현재 : ㈜엑스봇 주임연구원
∙2015년∼현재 : 목원대학교 석사과정 <주관심분야 : 로봇 기구학, 로봇 설계
및 제작>
서 용 호(종신회원)
∙1999년 : KAIST 전산학과(공학사)
∙2001년 : KAIST 전자전산학과(공학 석사)
∙2007년 : KAIST 전자전산학과(공학 박사)
∙2007년 : 미국 MS 로보틱스그룹 인턴 연구원
∙2008년 : 미국 퀄컴 과장
∙2010년∼현재 : 목원대학교 지능로봇공학과 부교수 <주관심분야 : 지능로봇, 로봇비전, 휴머노이드, 임베디드시
스템>