수동 소나 시스템을 위한 실효치교차율 분석 기반 음향센서 결함 탐지 기법
An acoustic sensor fault detection method based on root-mean-square crossing-rate analysis
for passive sonar systems
김용국,1,2† 박정원,1 김영신,1 이상혁,1 김홍국2
(Yong Guk Kim,1,2† Jeong Won Park,1 Young Shin Kim,1 Sang Hyuck Lee,1 and Hong Kook Kim2)
1LIG넥스원 해양연구소, 2광주과학기술원 전기전자컴퓨터공학부
(Received October 14, 2016; revised November 7, 2016; accepted January 25, 2017)
초 록: 본 논문에서는 수동 소나 시스템을 위한 수중 음향 센서 결함 탐지 기법을 제안하였다. 일반적으로 수동 소나 시스템에서는 수십개의 음향 센서를 통해 얻은 음향 신호를 이용하여 배열 신호처리 기법을 이용해 처리된 신호를 협 대역 또는 광대역 분석을 위한 2차원 영상 형태로 전시한다. 운용 소프트웨어에서 전시되는 탐지 결과는 배열 신호처리 를 통해 누적된 결과값을 전시하기 때문에, 단일 센서 채널의 결함 또는 고장에 따른 신호의 이상 여부를 판단하는데 어려움이 있다. 따라서 본 논문에서는 인접 채널간 실효치 비교 및 실효치교차율(Root Mean Square Crossing-Rate, RMSCR) 분석기반 센서 자동 결함 탐지 기법을 제안하고, 결함 센서 채널에 대한 처리 기법을 비교 분석하였다. 제안 된 기법의 성능 분석을 위하여 일부 연안 지역에서 실제 운용 중인 센서 배열을 통해 획득된 신호를 이용하여 결함 탐지 정확도를 측정하고, 결함 처리 기법의 성능을 비교하였다. 실험을 통해 제안된 기법이 높은 RMS의 주변소음 환경에서 도 높은 결함 탐지 정확도를 보였으며, 결함 처리 기법으로는 0으로 설정 처리 기법이 가장 높은 성능을 보였다.
핵심용어: 수동 소나, 음향 센서, 결함탐지, 실효치, 실효치교차율
ABSTRACT: In this paper, we propose an underwater acoustic sensor fault detection method for passive sonar systems. In general, a passive sonar system displays processed results of array signals obtained from tens of the acoustic sensors as a two-dimensional image such as displays for broadband or narrowband analysis. Since detection result display in the operation software is to display the accumulated result through the array signal processing, it is difficult to determine the possibility where signal may be contaminated by the fault or failure of a single channel sensor. In this paper, accordingly, we propose a detection method based on the analysis of RMSCR (Root Mean Square Crossing-Rate), and the processing techniques for the faulty sensors are analyzed. In order to evaluate the performance of the proposed method, the precision of detecting fault sensors is measured by using signals acquired from real array being operated in several coastal areas. Besides, we compare performance of fault processing techniques. From the experiments, it is shown that the proposed method works well in underwater environments with high average RMS, and mute (set to zero) shows the best performance with regard to fault processing techniques.
Keywords: Passive sonar, Acoustic sensor, Fault sensor detection, Root mean square, RMS (Root Mean Square) crossing-rate
PACS numbers: 43.60.Bf, 43.60.Qv, 43.30.Wi
†Corresponding author: Yong Guk Kim ([email protected]) Maritime R&D Center, LIG Nex1, 333 Pangyo-ro, Bundang-gu, Seongnam-si, Gyeonggi-do 13488, Republic of Korea
(Tel: 82-31-8026-4371, Fax: 82-31-8026-7089)
I. 서 론
최근 군사 및 민간 분야에서 다양한 수중 음파 탐 지기 기술이 개발되고 있다. 일반적으로 군사 목적 으로 사용되는 수중 음파 탐지 기는 잠수함, 어뢰, 기 뢰 등의 탐지 및 식별 등을 위해 주로 사용되며, 민간 분야에서는 주로 어군 탐지, 수중 탐사 등 해양환경 조사를 목적으로 주로 사용되고 있다.[1]
이러한 수중 음파 탐지기는 크게 능동 소나 및 수 동 소나시스템으로 분류가 가능하며 능동 소나 시스 템은 특정 위치에 설치된 송신 트랜스듀서에서 핑 신호를 송신하고, 일정거리에 떨어져있는 잠수함 및 기뢰, 수중부유물과 같은 수중 표적에 의해 반사되 어 오는 반사음을 탐지하는 장비이다.[1, 2] 이에 반해, 수동 소나 시스템의 경우에는 특정 수심에 설치된 하이드로폰을 이용해 수상함 및 잠수함의 엔진이나 프로펠러와 같은 기계류에서 발생하는 자체 소음을 탐지하는 장비이다.[1, 2]
소나 시스템을 설계하고 운용하는데 있어서 운용 주파수 대역 및 센서 채널 수의 결정과 함께 선형, 원 형, 원통형, 평면형 등과 같은 센서 배열 형태의 선택 및 높은 감도를 갖는 수중 음향 센서를 사용하는 것 이 중요하다.[2, 3]현재까지 압전센서, 광섬유 센서, 벡 터 센서 등 다양한 종류의 수중 음향 센서가 개발되 고 있으나,[4]실제 응용분야에서는 비용 및 효율 측 면에서 효과적인 압전센서가 주로 사용되고 있다.
이와 같이 수십 개의 센서로 구성된 배열형태의 소나 시스템을 운용하는데 있어서, 센서에 대한 물 리적, 전기적 충격에 의해 음향센서에 고장 및 결함 이 발생할 수 있는데, 센서 고장에 따른 신호 손실 및 결함에 따른 잡음의 유입으로 인해 시스템의 성능 저하를 야기한다.[2, 3]
센서의 불량형태는 주로 고장과 결함으로 나눌 수 있다.[5] 센서 고장이 발생한 경우 센서로부터 수신되 는 신호가 없지만, 센서 결함이 발생한 경우 센서로 부터 잘못된 신호가 지속적으로 수신된다. 이러한 이유로, 센서 결함에 대한 탐지가 고장 탐지 보다 더 어렵다.[5]
일반적인 소나 시스템에서는 동시에 입력되는 다 채널의 센서신호들을 이용해 잡음대성능비를 개선
하고 음원도래방향을 예측하는 일련의 과정을 수행 하는 어레이 신호처리, 즉 빔형성 기법을 통해 탐지 결과를 전시한다.[6]이러한 수동 소나 시스템에서, 실제 센서로 입력되는 원시 센서 신호를 모니터링 하지 않는 이상 소수 채널의 고장 또는 결함은 실제 운용자가 시각적으로 식별하기가 어렵다. 특히 결함 센서는 동작을 멈추지 않고 특정 상수 값의 형태가 아 닌 정상 신호와 유사한 신호를 지속적으로 발생시키 기 때문에 결함에 대한 판단을 더욱 어렵게 만든다.[7]
따라서 센서 결함을 자동으로 탐지하여, 탐지 성 능의 저하를 최소화 하고 이상 신호 발생에 따른 오 탐지 확률을 최소화하기 위한 결함 센서에 대한 처 리가 필요하다.[8]
본 논문에서는 수동 선배열 소나 시스템을 운용하 는 데 있어서 필요한 센서의 결함 유무를 판별할 수 있는 센서 결함 탐지 기법을 제안하였다. 제안된 기 법은 센서를 통해 입력되는 각 채널별 음향 신호의 실효치를 측정한 뒤, 문턱값 분석 방식을 통하여 결 함 발생 여부를 1차로 판단하고, 실효치교차율을 분 석하여 2차 판단하는 방식을 사용하였다. 또한 결함 으로 판별된 센서에 대하여 탐지 성능 감쇠를 최소 화 하기위한 결함 처리 기법을 비교 분석하였다.
본 논문의 구성은 다음과 같다. II장에서는 제안된 센서 결함 탐지 기법에 대해 설명하고, III장에서는 결함 처리 기법을 설명한다. IV장에서는 제안된 기 법에 대한 성능을 평가하였으며, V장에서 결론을 맺 는다.
II. 제안된 결함 탐지 기법
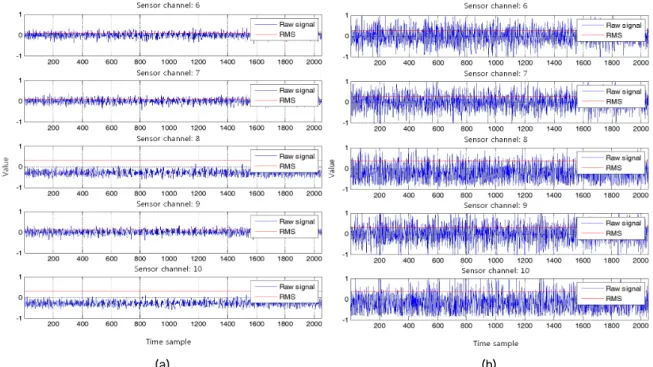
일반적인 수동 소나 시스템에서 음향센서의 고장 및 결함의 원인은 실제 단일 음향센서 모듈의 고장 또는 다수의 음향 센서에 전원을 공급하거나 센서 신호에 대한 아날로그에서 디지털변환 등을 수행하 는 멀티플렉서의 고장으로 인해 센서신호가 정상적 으로 수신되지 않는 문제가 주원인이며, 음향 센서 에 결함이 발생한 경우 Fig. 1(a)와 같이 결함이 발생 한 음향 센서 채널(결함발생 센서 채널: 8, 10)에 대하 여 인접채널과 상이한 센서신호가 수신됨을 관찰할 수 있다. Fig. 1(a)에 해당하는 센서신호에 대하여 실
(a) (b) Fig. 1. The plot of raw data in (a)normal and (b)noisy environments.
(a) (b)
Fig. 2. Illustration of RMS values according to different sensor channels when average RMS is (a)-18.6 dB(normal) and (b)-9.7 dB(noisy).
효치 값을 계산한 결과는 Fig. 2와 같다. 수신되는 센 서신호에 대한 실효치 역시 Fig. 1(a)와 마찬가지로 Fig. 2(a)와 같이 결함이 발생한 음향 센서 채널에 대 하여 인접채널과 상이한 실효치 값을 나타낸다. 즉, 결함 센서 신호의 경우 다른 정상 채널 신호에 비해 상대적으로 매우 크거나 작은 실효치 값을 보인다, 이는 결함이 발생한 센서 채널의 신호의 경우 신호 형태는 정상 센서와 유사한 형태를 보이지만 특정
값으로 편향되어 있기 때문이다. 그 뿐만 아니라, 센 서부에 전원이 적절히 공급되지 않는 경우 해당 센 서에서는 특정 값을 갖는 직류 신호를 출력하기도 한다. 따라서 기존의 센서 결함 진단은 Fig. 2(a)와 같 은 센서에 입력되는 신호의 실효치를 각 채널별로 측정해서 운용화면에 전시하고, Fig. 2(a)와 같이 인 접채널과의 실효치 차이가 가시적으로 발생하는 경 우 운용자가 주관적으로 센서 불량여부를 수동 판단
Fig. 3. Procedure of the proposed detection method.
하는 개념이 주로 적용되고 있다.[9]
하지만 Fig. 1(b)과 Fig. 2(b)와 같이 음향 센서에 대 한 수신 이득을 높이거나, 주변 해양소음의 증가(해 상 교통량 증가, 파도 및 강우 등)로 인해 인접센서에 수신되는 음향 신호의 크기가 증가하여 결함 센서에 서 출력되는 신호의 크기와 유사해 지는 경우, 운용 자가 센서 결함 발생 유무를 판단하기 어려울 뿐만 아니라, 단일 음향 센서에 결함이 발생한 경우에는 멀티플렉서가 고장인 경우에 비해 정상유무 판단이 어렵게 된다.
따라서 이러한 센서 결함에 대한 판단의 자동화 및 결함 진단 정확성을 높이기 위하여 Fig. 3과 같은 결함 탐지 기법을 제안하였다. 제안된 기법은 Fig. 3 과 같이 2단계로 구성되며 채널 별 실효치 값에 대한 문턱치 초과여부 분석을 통해 1차 판단을 수행하고, 2 차적으로 전체 센서에 대해 입력신호의 실효치교차 율을 측정 및 분석하여 최종 결함 판단을 수행한다.
상세 수행 과정은 다음과 같다.
먼저 입력되는 전체 개의 센서신호에 대하여 다 음과 같이 실효치를 계산한다. n은 프레임번호, 는
센서번호를 각각 의미한다.
〈〉 ⋯, (1) 〈〉
,
각 프레임별 실효치를 계산하고, 주기( = 8)로 선 형적분을 수행한다. 계산된 실효치를 이용하여 인접 채널과의 비교 수행을 통해 실효치차가 1차 결함판 단 문턱치 보다 작거나 큰 경우 센서를 결함으로 판별한다. 1차 결함판단 문턱치 는 전체 음향 채널 신호 평균 실효치, 에 대한 표준편차()를 이용하여 통계적으로 결정( ± )하였다.
결함판단 2단계에서는 신호의 변화 정도를 측정 하여 결함여부를 판별한다. 결함 센서 입력신호의 경우 정상신호와 유사하지만 특정 값만큼 편향되어 있거나, 전원이 정상적으로 인가되지 않는 경우 DC 와 유사한 값으로 입력되기 때문에 신호의 변화율을 결함 탐지의 방법으로 고려하였다. 신호의 변화 정도
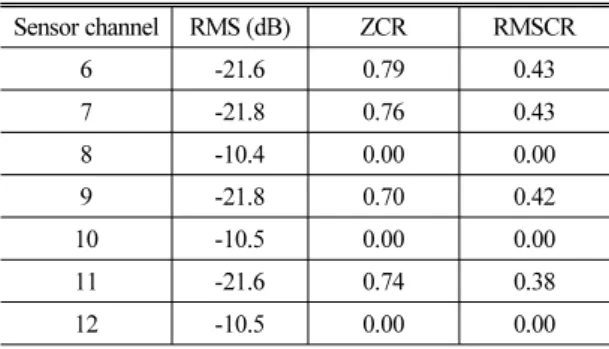
Table 1. ZCR and RMSCR of each sensor channel (at average RMS: -21.2 dB and T = 2).
Sensor channel RMS (dB) ZCR RMSCR
6 -21.6 0.79 0.43
7 -21.8 0.76 0.43
8 -10.4 0.00 0.00
9 -21.8 0.70 0.42
10 -10.5 0.00 0.00
11 -21.6 0.74 0.38
12 -10.5 0.00 0.00
Table 2. ZCR and RMSCR of each sensor channel (at average RMS: -12.8 dB and T = 2).
Sensor channel RMS (dB) ZCR RMSCR
6 -11.5 0.82 0.46
7 -11.8 0.84 0.45
8 -9.4 0.66 0.12
9 -10.8 0.84 0.45
10 -9.1 0.62 0.15
11 -11.1 0.81 0.45
12 -9.1 0.70 0.15
를 측정하는 척도로써 영교차율(Zero Crossing-Rate, ZCR)[10]이 사용 가능한데 결함 센서의 입력신호의 경우 Eq. (2)를 이용해서 Fig. 1에 사용된 신호의 영교 차율을 측정하였을 때 Table 1과 같이 정상신호에 비 해 낮은 영교차율 값을 보인다.
〈〉 〈〉 , (2)
, (3)
여기서 는 센서번호를 의미하고, 는 부호함수 를 의미한다.
영교차율 분석을 통해 직류 형태로 수신되는 센서 채널에 대하여 결함 판별이 가능하고(ZCR = 0), Fig.
1과 같이 결함 센서의 수신 신호 전체가 특정 값으로 편향되어 있는 경우 영교차율 분석을 통해 결함 판 별이 가능하다. 하지만 해양소음이 증가하는 경우 입력되는 신호의 분산이 커지게 되고 영교차율 역시
증가함에 따라 Table 2(Fig. 2에 사용된 신호)와 같이 결함 센서와 정상 센서의 영교차율 차이가 감소하게 된다. 따라서 영교차율을 결함진단의 척도로 사용하 는 경우, 일부 결함 채널에 대한 검출이 어려움에 따 라 본 논문에서는 위와 같은 현상에 기인하여 실효 치교차율을 측정하고 이 값을 센서 결함여부 판별을 위한 척도로 사용하였다. 실효치교차율은 Eq. (4)와 같이 계산할 수 있다.
〈〉〈〉, (4)
Rk, (5)
여기서 는 센서번호를 의미하고, 는 번째 센서 신호의 실효치 값을 의미한다.
결함 센서에 대해 측정된 실효치 교차율은 Tables 1과 2와 같다. Table 2에서 볼 수 있듯이 해양소음이 증가하는 경우에 결함 센서의 영교차율이 급격히 증 가함에 따라 정상 센서의 평균 영교차율과 결함 센 서 신호의 영교차율 차이가 감소하는 반면, 실효치 교차율은 결함 센서 신호의 실효치교차율 증가폭이 적음을 확인할 수 있다.
계산된 실효치교차율에 대하여 자동 결함 판별을 위해 Eqs. (6)과 (7)을 이용하여 평균 영교차율 대 채 널 별 영교차율비() 및 평균 실효치교차율 대 채널 별 실효치교차율비()를 계산한다.
, (6)
, (7)
여기서 은 전체 채널 평균 영교 차율, 는 번째 음향 채널 신호의 영교차율을 의미하고, 는 전체 채널 평
균 실효치교차율, 는 번째 음향 채널 신호
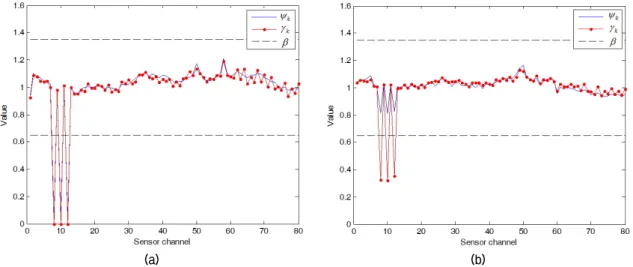
(a) (b)
Fig. 4. Illustration of and at T = 2, M = 80, and average RMS is (a) -21.2 dB and (b) -12. 8dB.
의 실효치교차율을 각각 의미한다.
Eq. (7)을 통해 계산된 이 2차 결함탐지 문턱치
보다 작거나, 보다 큰 경우 센서를 최종 결 함으로 판단한다. 2차 결함탐지 문턱치 는 결함 센 서가 없는 센서배열의 경우 에 대한 표준편차가 매우 작아지기 때문에 정상채널에 대한 오판별이 발 생할 수 있어, 1차 결함탐지 문턱치()와는 달리 고 정값을 이용한다. 2차 결함탐지 문턱치를 결정하는
는 본 연구를 위해서 변경이 가능한 파라미터로 설 정하였으며, 수 번의 시행을 통해 산출된 최적의 값 을 선택하였다.
Fig. 4(a)와 같이 주변소음이 작은 경우, 영교차율 을 사용하는 경우와 실효치교차율을 사용하는 경우 의 성능 차이가 거의 없지만, Fig. 4(b)와 같이 주변소 음이 증가한 경우, 영교차율을 사용하는 경우와 실 효치교차율을 사용하는 경우에 및 에서 차이가 발생함을 확인할 수 있다.
III. 센서 결함처리 기법 비교
본 장에서는 결함 판별된 음향 센서로 인한 탐지 성능의 저하를 최소화 하고, 이상 신호 발생에 따른 오탐지 확률을 최소화하기 위한 센서 결함처리 기법 을 소개한다. 탐지처리를 위해서는 센서에 입력되는 높은 주변소음에 대한 신호대잡음비 성능을 개선하 기 위한 빔형성 과정이 선행되는데, 신호처리에 사
용되는 센서 수에 따라 신호대잡음비 성능이 영향을 받는다. 함정이나 잠수함 등에 설치되는 이동형 음 향 센서 배열의 경우 결함 또는 고장이 발생한 음향 센서에 대하여 새로운 음향 센서로 교체가 가능하지 만, 주로 해저면 등에 포설 또는 매설되어 운용되는 고정형 센서 배열의 경우 음향 센서의 교체가 쉽지 않기 때문에 본 장에서 설명하는 센서 결함 처리를 수행하여 빔형성을 수행해야 한다.
본 논문에서 비교 분석을 수행한 결함 처리 기법 은 다음과 같다.
첫 번째는 결함이 발생한 센서 채널 신호를 0으로 설정하는 방법이다.
⋯, (8)
여기서 는 결함이 발생한 센서번호를 의미한다. 고 장 또는 결함이 발생한 센서 채널 신호를 0으로 설정 함으로써 잡음 유입을 차단함과 동시에 실제 빔형성 을 수행하는데 해당 채널의 영향을 배제하는 효과를 얻을 수 있다. 하지만 결함 채널의 수에 해당하는 만 큼 지향지수가 감쇠하게 된다.
두 번째는 결함이 발생한 센서 채널에 대하여 인 접채널 신호를 이용하여 보간하는 방법이다. 보간식 은 Eq. (9)와 같다.
Table 3. The sensor arrays for experiment.
Sensor arrays The number of sensors Total Normal Fault
1 80 74 6
2 80 68 12
3 80 77 3
Table 4. The precision of detecting sensor fault at
= 0.35.
Sensor arrays
Avg.
RMS (dB)
Integration Time T
Precision (%) ZCR
based
RMSCR based
1 -16.0
2 100 100
4 100 100
8 100 100
1 1.4
2 100 100
4 100 100
8 100 100
2 -17.3
2 100 100
4 100 100
8 100 100
2 1.35
2 100 100
4 100 100
8 100 100
3 -22.3
2 100 100
4 100 100
8 100 100
3 -19.12
2 78.6 100
4 97.8 100
8 100 100
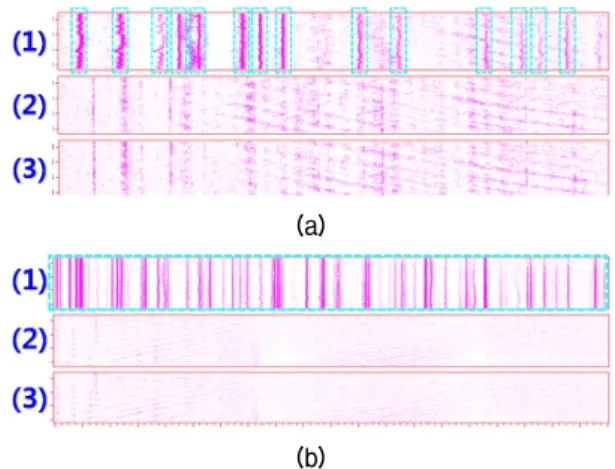
(a)
(b)
Fig. 5. The narrowband LOFAR grams corresponding to (a)low frequency band and (b)high frequency band.
, (9)
Eq. (9)와 같이 결함이 발생한 센서의 인접 센서 신호 를 합성하여 결함이 발생한 센서에 해당하는 신호를 생성하고, 새로 합성한 신호의 전력의 크기를 유지 하기 위하여 로 합성 신호를 나눈다. 신호 보간 을 통해 실제 센서신호와 유사한 센서를 생성할 수 있지만 각 센서에 신호가 도달하는 지연값, 즉 위상 차를 이용하는 빔형성에서 위와 같은 보간 기법을 사용하는 경우 지연 합을 수행 할 신호의 위상정보 에 오류가 발생할 수 있기 때문에 탐지 결과가 미세 하게 왜곡되는 문제가 발생할 수 있다.
IV. 성능평가
제안된 결함 탐지 기법의 성능평가를 위하여 다수 의 특정 해역에 실제 설치되어 운용 중인 수중 음향 센서 배열에 대하여 제안된 기법을 적용하여 결함 진단 성공률을 측정하였다.
결함 탐지 기법의 시험을 위해 다수의 배경소음 환 경에서 각각의 적분주기에 대해 영교차율기반 및 실 효치교차율기반 탐지 기법의 진단 성공률을 비교하 였다. 시험을 위하여 실제 소나 시스템에서 운용중 인 3개 배열 총 240개 음향 센서로부터 획득한 신호 를 사용하였으며, 시험에 사용된 배열의 센서 구성 은 Table 3과 같다. 채널에 대해 결함 진단 성공률을 측정 결과는 Table 4와 같다. Table 4에서 볼 수 있듯이 제안된 기법을 이용하는 경우 매우 높은 진단 성공 률을 보였으며, 단, 낮은 적분시간을 적용하는 경우 영교차율 기반의 탐지 기법이 실효치교차율 기반 탐 지기법에 비해 진단 성공률이 감소함을 보였다. 이 는 낮은 적분시간에서는 신호의 변화량이 크고 이에 따라 영교차율이 증가하여 결과적으로 가 감소되 었기 때문이다.
부가적으로 센서 결함처리에 대한 전후 성능 비교 시험을 수행하였다. 탐지에 사용되는 총 음향 센서 채널 수는 80개 채널이고, 결함 채널 수는 12채널이 다. (1)결함처리 미수행, (2)0으로 설정, (3)보간처리 에 대한 협대역 탐지 및 광대역 탐지 결과 비교를 수 행하였으며 각 비교 결과는 Figs. 5 및 6과 같다. Figs.
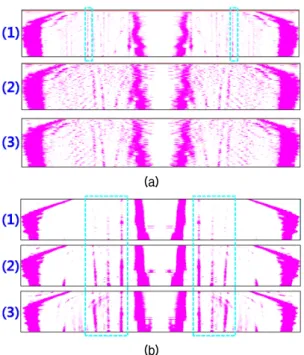
(a)
(b)
Fig. 6. The broadband BTR (Bearing Time Record) grams corresponding to (a) low frequency band and (b) high frequency band.
5 및 6의 탐지결과화면은 주파수 스펙트럼 및 방위 에너지 값에 대하여 0~255의 컬러로 양자화된 폭포 수 형태 전시 방식의 그램화면이며, 여기서 x축은 주 파수(Fig. 5) 및 방위(Fig. 6)를 의미하고 y축은 시간을 의미한다.
Fig. 5에서 볼 수 있듯이 LOFAR(LOw Frequency Analysis and Recording)[2, 11]탐지 결과를 전시하는 협 대역탐지 화면에서 결함채널 신호에 의한 잡음이 발생함(점선 박스 표시)을 확인할 수 있다. Fig. 6의 광대역탐지 결과[2,11]에서도 결함처리 수행 결과에 비해 결함처리 미수행 시 광대역 탐지 성능의 저하 를 관찰하였다. 저주파대역에 대한 광대역탐지 결과 의 경우 결함처리 미수행 결과(1) 화면에서 표적의 이동과 무관한 광대역 탐지 결과(점선 박스 표시)가 관찰되며, 고주파 대역에 대한 광대역 분석 결과 시 결함처리 미수행 결과(1)에서는 일부 표적이 탐지 되지 않고, 0으로 설정 처리 결과(2)에서는 표적이 탐 지, 보간처리 결과(3)에서는 표적이 탐지 되지만 표 적의 이동 항적에 일부 왜곡이 발생(점선 박스 표시) 하는 것으로 관찰되었다.
V. 결 론
본 논문에서는 수동 소나 시스템을 위한 수중 음 향 센서 결함 탐지 기법을 제안하였다. 제안된 기법 은 기존에 주로 사용되는 센서 입력 신호의 실효치 값에 대한 분석을 통해 1차 결함 탐지를 수행하고, 실 효치교차율 분석을 통해 2차 결함 탐지를 수행하였 다. 제안된 기법의 성능분석을 위하여 실제 설치되 어 운용중인 센서 배열을 통해 획득된 신호를 이용 하여 결함 탐지 성능 실험을 수행하였으며, 실험결 과를 통해 제안된 기법이 높은 결함 탐지 정확도를 보임을 관찰하였다. 또한 센서 결함 처리 기법 비교 를 수행하였으며, 결함처리를 수행하지 않는 경우 심한 신호 왜곡이 발생하고, 결함처리 기법을 적용 한 경우 미처리 결과에 비해 탐지 성능이 향상됨을 확인하였다. 향후 결함 채널에 대한 신호 지연 성분 및 전달경로를 고려한 센서 신호 생성 기법 연구가 필요할 것으로 예상된다.
본 논문을 통해 제안된 기법은 향후 수중 음향 센 서뿐만 아니라, 다양한 종류의 센서들을 위한 자동 결 함 탐지 기법으로 활용 할 수 있을 것으로 기대된다.
References
1. J. S. Kim, S. B. Hwang, and C. M. Lee, “A DEMON processing robust to interference of tonals” (in Korean), J. Acoust. Soc. Kr. 31, 384-390 (2012).
2. A. D. Waite, Sonar for Practising Engineers, 3rd Ed.
(Wiley, UK, 2002), pp. xvii.
3. C. H, Sherman and J. I. Butler, Transducers and Arrays for Underwater Sound (Springer, New York, 2007), pp. 267.
4. Y. Lim and Y. Roh, “Incidence angle estimation by the tonpilz type underwater acoustic vector sensor with a quadrupole structure” (in Korean), J. Acoust.
Soc. Kr. 31, 569-579 (2012).
5. C. Lo, M. Liu, J. P. Lynch, and A. C. Gilbert, “Efficient sensor fault detection using combinatorial group testing,”
in Proc. IEEE DCOSS, 199-206 (2013).
6. B. D. Van Veen and K. M. Buckley, “Beamforming: a versatile approach to spatial filtering,” IEEE Acoustics, Speech, and Signal Processing Magazine 5, 4-24 (1988).
7. S. Munir and J. A. Stankovic, “FailureSense: detecting sensor failure using electrical appliances in the home,”
in Proc. IEEE MASS, 73-81 (2014).
8. Y. G. Kim, Y. Kim, S. H. Lee, S.-T. Moon, M. Jeon, and H. K. Kim, “Underwater acoustic sensor fault detection for passive sonar systems,” in Proc. 2016 First Int. Workshop on Sensing, Processing and Learning for Intelligent Machines, 85-88 (2016).
9. Y. Zhang, N. Dragoni, and J. Wang, “A framework and classification for fault detection approaches in wireless sensor networks with an energy efficiency perspective,” Int. JDSN, 2015, Article ID 678029 (2015).
10. I. McLoughlin, Applied Speech and Audio Processing (Cambridge University Press, UK, 2009), pp. 136.
11. R. O. Nielsen, Sonar Signal Processing (Artech House, Norwood, 1991), pp. 155.
저자 약력
▸김 용 국 (Yong Guk Kim)
2006년 2월: 전남대학교 전자컴퓨터정보 통신공학부 학사
2008년 8월: 광주과학기술원 정보통신공 학부 석사
2010년 8월: 광주과학기술원 정보통신공학부 박사수료 2011년 1월 ~ 현재: LIG넥스원(주)
선임연구원
2014년 9월 ~ 현재: 광주과학기술원 전기전자컴퓨터공학부 박사과정
▸박 정 원 (Jeong Won Park)
2002년2월: 동아대학교 전자공학과 학사 2004년2월: 동아대학교 전자공학과 석사 2004년1월 ~ 현재: LIG넥스원(주)
수석연구원
▸김 영 신 (Young Shin Kim)
1997년 2월: 한양대학교 지구해양과학과 학사
2004년 8월: 한양대학교 지구해양과학과 석사
2008년 8월: 한양대학교 지구해양과학과 2008년 7월 ~ 현재: LIG넥스원(주) 박사
수석연구원
▸이 상 혁 (Sang Hyuck Lee)
1992년 2월: 충북대학교 컴퓨터공학과 학사 1995년 2월: 충북대학교 컴퓨터공학과 석사 1995년 4월 ~ 현재: LIG넥스원(주)
수석연구원
▸김 홍 국 (Hong Kook Kim)
1988년 2월: 서울대학교 제어계측공학과 1990년 2월: KAIST 전자공학과 석사학사 1994년 8월: KAIST 전자공학과 박사 1990년 ~ 1998년: 삼성종합기술원, 전문
연구원
1990년 ~ 1998년: MMC Technology 선임연 구원
1998년 ~ 2003년: AT&T Labs-Research Senior Member Technical Staff
2003년 ~ 현재: 광주과학기술원 전기전자컴퓨터공학부 교수
![Fig. 3. Procedure of the proposed detection method. 하는 개념이 주로 적용되고 있다. [9] 하지만 Fig. 1(b)과 Fig](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5398155.416998/4.892.218.669.166.589/procedure-proposed-detection-method-하는-개념이-적용되고-하지만.webp)