안정 파지를 위한 16자유도 역구동 관절을 가지는 인간형 로봇 손 개발
Development of a 16 DOF Anthropomorphic Robot Hand with Back-Drivability Joint for Stable Grasping
양 현 대1, 박 성 우2, 박 재 한3, 배 지 훈3, 백 문 홍†
Hyun-Dae Yang1, Sung-Woo Park2, Jae-Han Park3, Ji-Hun Bae3, Moon-Hong Baeg†
Abstract This paper focuses on a development of an anthropomorphic robot hand. Human hand is able to dexterously grasp and manipulate various objects with not accurate and sufficient, but inaccurate and scarce information of target objects. In order to realize the ability of human hand, we develop a robot hand and introduce a control scheme for stable grasping by using only kinematic information. The developed anthropomorphic robot hand, KITECH Hand, has one thumb and three fingers. Each of them has 4 DOF and a soft hemispherical finger tip for flexible opposition and rolling on object surfaces. In addition to a thumb and finger, it has a palm module composed the non-slip pad to prevent slip phenomena between the object and palm. The introduced control scheme is a quitely simple based on the principle of virtual work, which consists of transposed Jacobian, joint angular position, and velocity obtained by joint angle measurements. During interaction between the robot hand and an object, the developed robot hand shows compliant grasping motions by the back-drivable characteristics of equipped actuator modules. To validate the feasibility of the developed robot hand and introduced control scheme, collective experiments are carried out with the developed robot hand, KITECH Hand.
Keywords: Anthropomorphic Robot Hand, Dexterous Robot Hand, Stable Grasping, Blind Grasping, Opposition, Palm module, Soft-finger tip
1. 서 론1)
사람 손은 다양한 형태와 크기의 물체를 잡을 수 있으 며 잡은 물체를 정밀하게 조작하는 것이 가능하다. 예를 들면, 물을 마시기 위해 컵을 잡거나 연필을 집어 글씨를 쓰는 등의 도구를 이용하여 작업을 하는 것이 가능하다. 이와 같이 다양하고 유연한 물체 조작을 수행하는 로봇 손의 개발을 위해 국내외 대학의 연구실과 연구기관 등 에서 다양한 연구들이 진행되어 오고 있다.
로봇 손의 유형은 집게(gripper)방식, 의인화(anthropo-
Received : Mar. 21. 2011; Reviewed : Apr. 20. 2011; Accepted : Jun. 24. 2011
†교신저자:한국생산기술연구원 로봇융합연구그룹 수석연구원
1과학기술연합대학원대학교 지능형로봇공학과 석박사통합과정
2 과학기술연합대학원대학교 지능형로봇공학과 석사과정
3 한국생산기술연구원 로봇융합연구그룹 선임 연구원
morphic)방식, 그리고 손재주(dexterous) 방식으로 구분 할 수 있다. 첫 번째로, 단순하고 정형화된 물체를 대상으 로 단순한 반복 작업을 수행하는데 적합한 집게방식의 로봇 손이 있다. 주로 생산 공정에서 이용되며 기계적 구 조가 단순하고 제어 방법도 간단하지만, 작업 대상 물체 에 국한하여 최적화되어 있으므로 실생활에서 접하게 되 는 다양한 형태의 비정형화된 물체를 다루는 데는 한계 가 있다. 다음으로, 집게방식과는 형태나 기능면에서 다 른 의인화 형태의 로봇손이 있다. 사람 손의 크기와 형태 가 유사한 소형화된 다지(multi-fingered)형태로, 실제 물 건을 잡고 조작하는 기능보다는 휴머노이드 또는 안드로 이드와 같이 사람과 유사한 형태를 가지는 로봇의 손동 작 구현에 적합한 로봇 손이다[1-3]. 사람이 느끼는 로봇에 대한 거부감을 최소화하기 위해 형태와 크기에 주목하며,
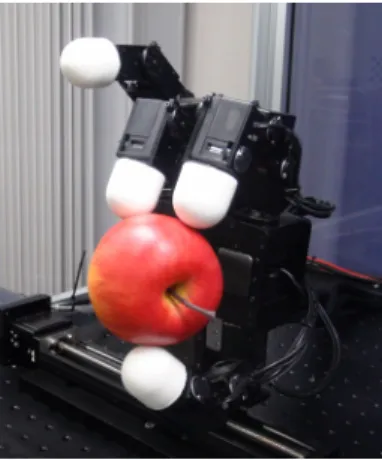
그림 1. KITECH HAND
와이어구동(tendon-driven) 또는 종속관절(coupled joint) 을 주로 사용하기 때문에 사람 손과 같은 다양하고 유연 한 조작 기능 구현에는 한계가 있다. 마지막으로, 서로 다 른 방식의 장점을 접목한 손재주 방식의 로봇 손이 있
다.[4-17] 이 방식은 사람의 손과 같이 비정형화된 물체 조
작 구현에 적합하도록 다관절 구동방식을 사용한다. 따라 서 독립적인 관절 움직임을 위해 다수의 액추에이터가 필요하다. 또한 대상물체를 잡고 조작하기 위해 필요한 인식이나 정보 획득을 위해 관절측정 센서, 접촉여부 판 단 센서, 그리고 접촉 힘 측정 센서 등과 같은 각종 센서 들을 사용한다. 그러나 많은 액추에이터와 센서의 사용으 로 인해 로봇 손의 소형화가 어렵고 기계적 구조와 제어 가 복잡해지며 가격이 비싸지는 단점이 있다. 현재, 로봇 손의 물체 파지 및 조작에 관한 연구는 이론적인 연구단 계에 있으며, 소수의 연구기관과 기업에서 로봇 손을 이 용한 물체 파지와 조작에 대한 연구 결과와[6,7] 연구용 플 랫폼으로 개발된 제품을 출시하고 있다[10-12]. 또한, 일부 연구기관에서는 개발된 로봇 손을 이용하여 원격조작을 통해 물체를 파지하는 연구에도 응용하고 있다[9-10].
본 연구에서는 로봇 손의 기구학적 정보만을 이용하여 물체의 정확한 정보 없이도 비정형화된 물체를 안정적으 로 잡는 것이 가능함을 보이기 위해 손재주 방식의 로봇 손, KITECH Hand를 개발하였다(그림 1). 특히, 물체를 잡을 때 중요한 역할을 하는 엄지와 다른 손가락들 사이 의 대립움직임(Opposition)[18]이 유연하게 발생하도록 로 봇 손가락을 배치하였으며, 로봇 손가락이 물체 또는 외 부 환경과의 접촉에서 발생되는 외력에 쉽게 순응하기 위해 모든 관절이 손쉽게 역-구동(back-drivability)이 가 능하도록 설계하였다. 이 논문에서는 비정형화된 물체의
유연한 파지 기능을 구현할 수 있는 로봇 손 개발에 대해 서 설명하고, 다양한 형태의 물체를 잡는 파지 실험을 통 해서 개발된 로봇 손이 다양한 파지 전략을 수행 할 수 있는 잠재성을 증명한다.
2. 사람 손과 로봇 손의 잡기
사람은 손의 위치정보, 파지 대상물체의 자세(위치, 방 향)와 크기 파악을 위한 시각정보, 그리고 물건의 접촉 또는 표면의 재질 파악이 가능한 촉감정보 등의 다양한 정보들을 이용하여 물체를 잡거나 조작을 한다. 대부분 손재주 방식의 로봇 손은 사람 손과 같은 기능 구현을 위 해 고가의 시각 정보 시스템(카메라, LRF)이나 환경과의 접촉 및 힘 정보를 얻을 수 있는 F/T 센서를 이용하여 위 치 및 힘 기반의 임피던스 제어와 같은 복잡한 제어를 수
행한다[7,12]. 그러나 사람은 사물의 인지능력과 인체 제어
능력이 떨어져도 즉, 사람에 의해 획득된 정보가 로봇 손 의 센서정보 보다 부정확하더라도 안정된 물체 잡기를 구현한다. 실례로 어린아이가 물체를 잡고 조작하는 것을 관찰하면, 부정확한 정보를 이용하여 수학적으로 세련되 고 안정한 잡기는 아니지만 물체를 놓치지 않을 정도의 대략적인 잡기 동작을 수행 할 수 있다. 그 후, 조작을 위 해 물체를 고쳐 잡는 동작을 수행하거나 이 동작 없이 바 로 물체를 조작한다. 따라서 사람 손의 기능을 잡기 (Grasping)기능, 조작을 위한 고쳐 잡는(Re-grasping) 기 능, 물건 조작(Manipulate) 기능으로 나눌 수 있다. 숙달 된 성인의 경우, 이 세 가지의 기능이 일련의 한 동작으 로 빨리 실현가능하다.
이렇게 나누어진 사람 손의 기능 중 본 연구에서는 첫 번째 기능인 잡기에 초점을 맞추어 최소한의 정보[19,20]만 을 이용하여 물체를 안정적으로 잡을 수 있는 로봇 손의 개발과 제어방법에 관해 논의한다.
3. 로봇 손 설계
사람 손의 기능을 구현하기 위해 기존의 다지 형태의 로봇 손들은 크게 관절 구동방식, 구동기 종류, 그리고 사 용된 센서의 종류에 따라 다양한 형태와 특징을 가지며 개발되었다.
먼저 로봇 손가락 관절을 움직이기 위해 관절 근처가 아닌 손등 또는 손목과 같은 관절 외부에 액추에이터를 장착하고 와이어를 통하여 관절을 구동하는 방식[4-6,11]의
특징은 로봇 손을 사람 손 크기와 유사하도록 소형화와 자유로운 움직임을 위한 많은 관절 자유도를 가질 수 있 도록 설계가 가능한 것이다. 특히 Shadow사의 Dextrous Hand는 손바닥까지 움직일 수 있는 24자유도를 가진다
[11]. 하지만, 상대적으로 액추에이터들이 설치되는 팔뚝 부분의 부피가 커서 로봇 팔에 부착하기 어렵기 때문에 로봇 팔과 손의 통합 시스템 구성이 힘들다. 그리고 이 방식은 와이어의 탄성으로 인해 물체를 안정적으로 잡을 수는 있지만, 정밀한 관절 제어가 어렵고. 또한 관절의 역 -구동 능력은 떨어진다. 이와 같은 단점을 보완하기 위해 액추에이터를 관절 근처에 장착하여 감속기[7,8,10,12]나 벨 트[13]를 통해 관절을 구동하는 방식은 기구학적 관계식이 간단하여 제어적인 측면에서는 장점을 가지지만, 액추에 이터 크기의 제약으로 인해 소형화나 자유도 수와 같은 외형적인 측면에 단점이 발생한다. 이를 해결하기 위해 손가락의 마지막 마디들을 four-bar메커니즘과 같은 종속 관절로 배치하여 액추에이터의 수를 줄인 대신에 로봇 손 의 소형화를 이룬다[7,8,12]. 그리고 액추에이터에 연결된 감 속기의 비율에 따라 로봇 손의 역-구동 능력이 좌우된다.
다음으로 공기압 액추에이터[11], SMA액추에이터[14], DC모터, 그리고 초음파 모터[13]등과 같이 로봇 손의 관절 을 움직이는 구동기에 따라 로봇 손은 다양한 특징을 가 진다. 공기압 액추에이터는 와이어 구동방식과 함께 사용 되며 무게에 비해 큰 힘이 장점이고 또한 공기압 실린더 의 순응 능력으로 안정한 파지가 가능하다. 그러나 공기 흐름을 제어하는 밸브의 부피가 크고 또한 공기압의 비 선형 특성으로 인해 제어가 쉽지 않다. 그리고 공기압 액 추에이터와 유사한 성질을 가지는 SMA(Shaped Memory Alloy) 액추에이터는 사람의 근육움직임을 모방하여 만 든 인공근육 액추에이터로서 사람 손과 유사한 움직임 구현에는 장점을 가지지만 조작 기능 구현에는 많은 어 려움이 있어 의인화 형태의 로봇에 많이 사용된다. 이에 반해, 많은 로봇들의 관절 구동기로 사용되는 DC모터는 전류 제어를 통해 선형적인 토크 제어가 가능한 특징이 있다. 그러나 큰 출력을 위해서는 DC모터의 무게와 크기 가 커지거나 감속기의 비율이 높아져야 하는 단점이 있 다. 초음파 모터는 앞서 설명한 구동기의 장단점을 극대 화 한 것으로 무게와 부피에 비해 큰 힘을 출력할 수 있 어 로봇 손의 소형화에는 어울리지만 초음파 모터의 비 선형 때문에 제어가 쉽지 않고 또한 정지 토크가 커서 역 -구동은 불가능하다.
마지막으로 로봇 손에서 가장 주요한 특징인 물건 파 지와 조작 제어 성능을 향상시키기 위해 다양한 센서들 이 정보획득 목적으로 사용된다. 대다수 로봇 손들은 기 초적인 관절정보를 얻기 위해 엔코더(encoder) 또는 전위 차계(potentiometer)를 기본적으로 사용한다. 로봇 손의 물체 파지 여부 또는 환경과의 접촉여부를 판단하기 위 해 압전소자[15], 실리콘[16] 그리고 비전시스템[17]을 손가 락 끝이나 손바닥에 장착한다. 그리고 로봇 손의 정밀한 파지 능력 및 조작에 필요한 접촉된 힘을 측정하기 위해 압력센서[8], 로드셀(Load Cell) 그리고 6축 F/T[7,12] 센서 등 다양한 센서들을 사용한다. 그러나 이와 같은 힘 측정 센서들은 신호처리 주기가 제어주기 보다 느리고 노이즈 에 불안정한 단점이 있다. 이 단점으로 인해 정확한 접촉 힘을 얻기 힘들어 오히려, 불안정한 제어가 이루어 질수 있다. 기존의 로봇 손들의 특징을 바탕으로 이번 연구에 서 개발될 로봇 손은 크기가 작은 DC 모터, 감속기 그리 고 전위차계 센서를 이용하여 관절을 직접 구동시키는 형태로 설계되었다.
로봇 손이 안정한 파지를 할 수 있도록 다음의 4가지 사항을 추가로 고려하였다. 먼저, 엄지와 나머지 손가락 사이에 대립움직임이 손쉽게 발생하도록 엄지와 손가락 들을 각각 4자유도 구조로 배치하였다. 두 번째로, 단순 하고 간략한 파지 제어를 위해 물체와의 접촉 힘을 측정 없이 기구학 정보를 얻기 위한 관절각 센서만을 사용하 였다. 대신에 접촉 힘 제어를 위해 전류제어 방식의 모터 드라이버를 채택하였다. 세 번째로, 간단한 유지 보수와 역-구동이 가능하도록 모터, 기어박스, 그리고 센서를 통 합한 액추에이터 모듈을 구성하였다. 마지막으로, 움켜잡 기 동작(Envelop Grasping)과 정밀잡기 동작(Precision Grasping) 시에 미끄러짐을 방지하고 안정성을 높이기 위해 손바닥 모듈과 손가락 모듈을 설계 제작하였다.
3.1 엄지와 손가락 구조
엄지와 손가락 사이의 대립움직임은 사람의 비정형 물 체 잡기와 조작에 있어서 가장 중요한 특성이다. 대립 움 직임을 정량적으로 표현한 지표가 엄지 길이를 검지 길 이로 나눈 백분율(opposability index)이다[18]. 짧은 엄지 의 길이로 인해 사람보다 손의 조작능력이 떨어지는 오 랑우탄과 같은 유인원의 평균 지표는 40이고 유인원보다 상대적으로 엄지가 긴 사람의 평균 지표는 60이다. 만약, 지표가 100이상으로 엄지의 길이가 사람의 것보다 더 길
그림 2. 엄지 구조
(a) Yaw 조합 손가락 (b) Roll 조합 손가락 그림 3. 손가락의 작업 공간비교
(a) Yaw 조합 손가락 (b) Roll 조합 손가락 그림 4. Y-Z 평면에서의 작업 공간 비교 어지게 되면 엄지와 손가락 사이의 대립움직임은 더 원
활히 이루어지지만, 주먹을 쥐는 것과 같은 움켜잡기 동 작은 부자연스러워 진다. 즉, 사람의 엄지 길이는 움켜잡 기 동작과 정밀잡기 동작 사이에 최적화된 것이다. 따라 서 이 지표를 이용하여 사람 손과 유사한 지표를 가지도 록 로봇 손의 엄지와 검지 비율을 설정하였다. 그러나 로 봇 손은 사람 손과 달리 손바닥의 자유도 없이 설계될 예 정이기 때문에 로봇 엄지와 그 엄지에서 가장 멀리 위치 하고 있는 약지 사이의 원활한 대립 움직임을 위해 대립 움직임 지표를 75로 설정하였다.
엄지와 손가락사이의 대립움직임이 보다 여유롭게 움 직일 수 있도록 각각의 손가락을 여유자유도를 가지는 4 자유도로 설계하였다. 먼저 엄지 구조는 엄지 끝이 다른 손가락 끝 방향으로 손쉽게 움직여 손가락 사이의 대립 움직임이 원활히 이루어지도록 손목손허리뼈 관절(CMC joint)을 yaw와 pitch자유도로 구성하고 또한 엄지 끝과 손바닥과의 대립움직임이 발생하도록 나머지 2개의 관절 (MCP joint, IP joint)을 각각 yaw자유도로 구성했다(그 림 2).
다음으로, 손가락 구조의 손허리손가락 관절(MCP joint)은 yaw와 pitch자유도 조합 또는 roll과 pitch자유도 조합으로 구성할 수 있다. 이 두 조합의 성능 비교를 위 해 손가락 끝과 손바닥과의 대립움직임이 발생하도록 나 머지 2개의 관절(PIP joint, DIP joint)들을 각각 pitch자 유도로 구성했을 경우, 각 조합의 작업 공간 영역은 그림 3의 파란 점으로 표현된다.(≤ , ≤
≤ ). 여기서 빨간 링크는 손가락을 나타낸다. Y-Z 평면에서의 작업 공간 영역인 그림 4를 보면, yaw 자유 도 조합 손가락은 손가락이 다 펼쳐졌을 때( ) 움직임이 제한되고 roll 자유도 조합 손가락은 손가락 끝
이 특정위치일 때() 움직임이 제한된다.
우리는 주로 손가락이 물건을 잡거나 조작할 때 손가 락 끝의 작업영역을 (80,0,10) 중심으로 반경 40mm이내 의 공간으로 설정하였고 그 작업공간은 식(1)으로 표현할 수 있다(원점은 MCP 관절의 회전축이다).
≤ (1)
이 작업 영역에서 yaw자유도 조합 손가락은 roll자유 도 조합 손가락 보다 좀더 y축 방향으로 쉽게 움직일 수 있기 때문에 manipulability index가 큰 것을 알 수 있다.
그림 5의 파란 점들은 X-Z 작업 공간에서의 manipul- ability index를 표현한 것이고 빨간 점선은 주요 작업영 역을 X-Z 공간상으로 표현한 것이다. 여기서 사용된 manipulability index는 식(2)와 같다. 여기서, 는 각 손 가락의 자코비안 관계식 이고 는 관절 벡터이다.
⊤ (2)
최종적으로 우리는 손가락 구조를 그림 6처럼 하나의 yaw자유도와 3개의 pitch 자유도로 구성하였다.
(a) Yaw 조합 손가락 (b) Roll 조합 손가락 그림 5. X-Z 작업 공간에서의 Manipulability index 비교
그림 6. 손가락 구조
3.2 액추에이터 모듈
각각 4자유도로 이루어진 엄지와 손가락의 유연한 움 직임구현을 위해서는 모든 관절이 능동적으로 움직여야 한다. 또한 로봇 손이 환경과 접촉할 때 생기는 외력에 쉽게 순응하기 위해서는 모든 관절이 역-구동이 가능해 야 한다. 마지막으로, 효과적인 로봇 손의 사용을 위해서 는 유지 보수가 쉬워야 하기 때문에 이 모든 것을 고려하 여 모터, 기어박스, 그리고 센서 시스템을 통합한 액추에 이터 모듈을 구성하였다.
로봇 손의 가반하중(payload) 1 kg이상, 관절의 반응속 도는 30rpm이상, 그리고 역-구동이 가능하도록 액추에이 터 모듈에 전류 토크제어가 가능한 DC모터(4.5Watt)와 백래쉬와 마찰이 다소 작은 평기어(spur-gear)모듈(1:191) 을 사용하였다. 센서부분에 있어서는 파지 제어에 이용되 는 최소한의 정보인 기구학 정보를 얻기 위해 관절각 센 서만을 사용하였다. 대신에 접촉 힘 제어를 위해 전류제 어 방식의 모터 드라이버를 채택하였다. 이렇게 제작된 액추에이터 모듈은 조립과 유지보수의 편의를 위해 모든 관절에 똑같이 적용된다.
3.3 손바닥 모듈과 손가락 끝 모듈
사람 손은 물건을 움켜잡거나 집을 때에 각각 손가락 과 손바닥사이에 대립움직임과 엄지와 손가락 사이의 대 립움직임을 이용한다. 이때 엄지와 손가락의 끝 부분과 손바닥은 물체가 손에서 미끄러지는 현상을 방지해 줄뿐 만 아니라 물체의 형태에 맞게 변형되어 안정적인 파지 동작을 유지시켜 준다.
먼저, 이와 같은 손바닥 기능구현을 위해 로봇 손바닥 의 자유도를 이용하는 방법보다는 미끄럼 방지와 쿠션기 능을 가진 논슬립 패드(Non-slip pad)가 부착된 손바닥 모듈을 제작하였다(그림 7). 논슬립 패드를 두 개의 알루 미늄 판 사이에 끼워 넣어 논슬립 패드를 돌출 시키는 방 식으로, 논슬립 패드가 손상되었을 때에 손쉽게 교체가 가능하다. 다음으로, 손가락 끝 부분은 제한된 로봇 손의 자유도에 상관없이 대립 움직임이 원활히 발생할 수 있 도록 사람 손끝과 같은 다면체의 형태가 아닌 반구 형태 로 제작하여 물체 표면 위에서의 구름(Rolling)[19,20]이 일 어날 수 있도록 제작하였다. 또한 손끝이 파지력에 의해 변형이 되어 면 접촉이 일어나 파지 안정성을 높일 수 있 도록 실리콘과 알루미늄 봉을 이용하여 제작하였다.
그림 7. 손바닥 모듈
3.4 로봇 손의 구조 및 사양
사람의 손은 엄지와 4개의 손가락으로 이루어져 있지 만 물건을 잡거나 조작할 때에 새끼손가락의 역할은 제 한적이라고 가정하고 엄지와 3개의 손가락으로 로봇 손 을 구성하였다. 그리고 가운데 손가락을 기준으로 양옆의 손가락을 5[deg] 씩 기울어지게 배치를 해서 손가락이 자 연스럽게 모아지도록 했다. 최종적으로 3D 캐드를 이용 해서 설계된 로봇 손은 그림 8의 좌측과 같고 로봇 손의 작업 공간은 그림 8의 우측과 같다. 마지막으로 로봇 핸 드의 특징은 표 1과 같다.
특징 KITECH Hand
손가락 수 4
자유도 16 (4*4)
무게[kg] 1.8
크기[mm] 345.5 X 293 X 51.5 가반하중[kg] 1.5 (envelop grasping)
Opposability index 75
표 1. KITECH Hand의 특징
그림 8. 로봇 핸드 구성(좌) 및 작업 공간(우)
4. 안정 파지
4.1 최소한의 정보를 이용한 파지제어
이 절에서는 개발된 로봇 손의 실용성 확인을 위해 안 정 파지 실험에 적용될 제어 방법을 간단히 소개한다. 앞 서 소개된 것과 같이 엄지와 손가락 그리고 손가락과 손 바닥 사이의 유연한 대립 움직임을 위해서 로봇 손가락 들은 여유자유도를 가지는 4자유도 구조로 설계 되었고, 파지 제어 시에는 기구학정보만을 이용한다. 엄지와 손가 락 끝점들의 위치를 로, 끝점들 사이의 안정점을 로 정의하면 식(3)처럼 각 손가락의 파지력 방향벡터 가 구해진다. 또한, 식(4)를 이용하여 엄지와 손가락들이 힘 의 평형관계를 이루는 각 손가락의 파지력 를 결정할 수 있다. 여기서 는 사용자가 결정할 수 있는 변수이다.
∥ ∥
(3)
(4)
두 손가락(1, 2)과 엄지(3)를 이용한 파지의 경우, 한
손가락의 힘()을 결정하고 끝점과 안정점 사이의 거리 와 힘과의 반비례 관계를 이용하여 나머지 손가락의 힘
∥ ∥∥ ∥을 구할 수 있으며, 식(4)에 의해 엄지의 힘() 또한 얻어진다. 가상 일의 원리를 이 용하여 각 손가락 끝에서 파지력 를 발생하기 위한 각 관절의 토크는 식(5)와 같다. 여기서, 는 관절 각속도 벡터 이며, damping gain 행렬 ( )은 대각 행렬 형태로 로봇 손가락 운동방정식의 관성 성분
(Inertial matrix)을 이용하여 식(6)처럼 선정할 수 있다[21,22].
⊤ (5)
(6)
4.2 안정파지 실험
실험 장치의 구성은 그림 9와 같으며 특히, 본 연구에 서는 물체의 질량에 대해 고려하지 않았다. 대신, 물체의 질량을 파지력에 비해 무시할 수 있을 만큼 충분히 가벼 운 물체에 대하여 실험을 진행하였다. 그림 9의 1과 2에 보이는 것처럼 표면이 불규칙한 참외 모형을 손가락 1, 2 와 엄지를 이용해서 손끝으로 잡는 실험을 진행하였다. 파지 시 로봇 손은 엄지와 두 손가락들 사이에 물체가 있 다는 정보만을 이용하였다. 앞 절에서 소개된 제어 방법 을 이용하여 물체 파지가 안정적으로 이루어지는지 확인 하기 위해 우리는 로봇 손이 파지하고 있는 참외 모형에
축 방향으로(2→3), 축 방향으로(3→4), 축 방향으로(4→5), 마지막으로 축 방향으로(5→6) 외력 을 가하였다.
참외모형에 외력을 가하는 동안의 로봇 손가락들과 엄 지의 반응 그래프는 각각 그림 10, 그림 11, 그리고 그림 12와 같다. 그래프는 점선으로 총 5구간으로 나눠지고, 점선에서 참외모형에 외력을 가하게 된다. 각 그림의 첫 번째 그림은 4개의 관절 움직임 을 나타낸 것이고 두 번째 그림은 관절 각속도 을 표시한 것이다. 관절 각속 도 그래프에서 노이즈의 영향이 나타나지만, 외력이 가해 지지 않는 부분에서 0으로 수렴하는 경향이 잘 나타난다.
따라서 외력이 가해진 상태에서도 제안된 제어방식(5)에 의해 로봇 손은 참외모형을 안정적으로 파지하고 있음을 알 수 있다.
그림 9. 외력에 반응하는 로봇 손의 움직임
(a) 각도 (b) 각속도 그림 10. 손가락1의 반응 결과
(a) 각도 (b) 각속도 그림 11. 손가락2의 반응 결과
(a) 각도 (b) 각속도 그림 12. 엄지의 반응 결과
그림 13. 정밀잡기 실험 결과
그림 14. 움켜잡기 실험 결과
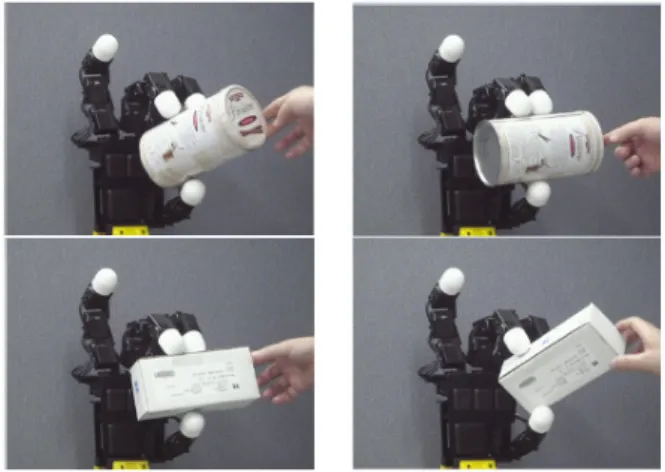
또한 그림 13은 원통 또는 직육면체의 물체의 자세에 상관없이 로봇손이 엄지와 두 손가락을 이용하여 안정하 게 정밀잡기동작을 수행하는 것이다. 즉, 물체의 정확한 위치 정보, 형태 정보, 그리고 물체와의 접촉정보가 없이 도 안정적으로 파지가 가능함을 알 수 있다. 그림 14는 로봇 손의 움켜잡기 동작을 수행한 것으로 다양한 형태 의 물건을 안정하게 파지가 가능함을 알 수 있다.
5. 결 론
본 연구에서는 기구학적 정보만을 이용하여 안정파지 가 가능한 제어방법을 소개하고 그 방법에 적합한 인간 형 로봇 손(KITECH Hand)의 개발에 대해 논의하였다.
다양한 형태와 크기의 물체를 이용하여 파지 실험을 진 행하였으며 물체의 정확한 정보 없이도 안정된 파지가 가능함과 개발된 로봇 손의 실용성을 확인하였다. 특히,
외력의 영향 하에서도 로봇 손이 안정되게 물체의 파지 를 유지하며 순응하는 특성을 확인하였다.
앞으로 로봇 손의 개발과 관련해 사람의 손과 비슷한 크기로의 로봇 손 소형화와 로봇 손과 물체사이에서 발 생하는 접촉력의 크기와 방향 측정이 가능한 센서(F/T, tactile 등)의 장착에 대해 연구를 진행할 예정이다. 특히, 본 연구에서 자세히 다루지 않은 안정 파지제어와 물체 의 질량을 고려한 제어방법에 대하여 현재 진행 중인 연 구결과를 반영한 시뮬레이션 및 실험을 계획하고 있다. 또한, 앞서 논의된 손의 기능 중 잡은 물체의 파지 안정성 을 판단하여 다시 물건을 잡는 동작을 구현할 예정이다.
참 고 문 헌
[1] K. Hirai, M. Hirose, Y. Haikawa, and T. Takenaka,
“The Development of Honda Humanoid Robot,” in Proc. IEEE Int. Conf. Robotics and Automation, Vol.2, pp.1321-1326, May 16-19, 1998
[2] J.-H. Oh, D. Hanson, W.-S. Kim, I. Han, J.-Y. Kim, and I.-W. Park, “Design of Android type Humanoid Robot Albert HUBO,” in Proc. IEEE/RSJ Int. Conf.
Intelligent Robots and Systems, pp.1428-1433, Oct.
9-15, 2008
[3] K. Kaneko, F. Kanehiro, M. Morisawa, K. Miura, S.
Nakaoka, and S. Kajita, “Cybernetic Human HRP- 4C,” 9th IEEE-RAS Int. Conf. Humanoid Robots, pp.7-14, Dec. 7-10, 2009.
[4] J.K. Salisbury and M.T. Mason, Robot Hands and the Mechanics of Manipulation, MIT Press, 1985
[5] S.C. Jacobsen, E.K. Lversen, D.F. Knutti, R.T.
Lohnsan and K.B. Biggers, “Design of the Utah/M.I.T. Dexterous Hand,” in Proc. IEEE Int.
Conf. Robotics and Automation, pp.1521-1532, Apr, 1986
[6] C.S. Lovchik and M.A. Diftler, “The Robonaut hand:
a dexterous robot hand for space,” in Proc. IEEE Int.
Conf. Robotics and Automation, Vol.2, pp.907-912, May, 1999.
[7] J. Butterfas, M. Grebenstein, H. Liu, and G.
Hirzinger, “DLR-hand II: Next generation of a dextrous robot hand,” in Proc. IEEE Int. Conf.
Robotics and Automation, pp.109-114, May 21-26,
2001.
[8] H. Kawasaki, T. Komatsu, and K. Uchiyama,
“Dexterous anthropomorphic robot hand with distributed tactile sensor: Gifu hand II,” IEEE/ASME Trans. Mechatronics, Vol.7, No.3, pp.296-303, Sep.
2002.
[9] T. Endo, H. Kawasaki, T. Mouri, Y. Ishigura, H.
Shimomura, M. Matsumura, and K. Koketsu,
“Five-Fingerd Haptic Interface Robot: HIRO Ⅲ,”
IEEE Trans. on Haptic, Vol.4, pp.14-27, 2011
[10] W.T. Townsend, “The Barrett Hand Grasper,” Journal of Industrial Robot, Vol.27, No.3, pp.181-188, 2000 [11] Shadow Dexterous Hand, (Shadow Robot Ltd.,
London 2007) http://www.shadowrobot.com/hand [12] Z. Chen, N. Y. Lii, T. Wimboeck, S. Fan, M. J, C.
H. Borst, and H. Liu, “Experimental Study on Impedance Control for the Five-Finger Dexterous Robot Hand DLR-HIT Ⅱ,” in IEEE/RSJ Int. Conf.
Intelligent Robots and Systems, pp.5867-5874, Oct.
18-22, 2010.
[13] I. Yamano and T. Maeno, “Five-Fingered Robot Hand using Ultrasonic Motors and Elastic Elements,”
in Proc. IEEE Int. Conf. Robotics and Automation, pp.2684-2689, April, 2005.
[14] K.J. Cho, J. Rosmarin and H. Asada, “SBC Hand: A Lightweight Robotic Hand with an SMA Actuator Array implementing C-segmentation,” in Proc. IEEE Int. Conf. Robotics and Automation, pp.921-926, April, 2007.
[15] T.B. Martin, R.O. Ambrose, M.A. Diftler, R. Jr.
Platt, and M.J. Butzer, “Tactile Gloves for Autonomous Grasping with the NASA/DARPA Robonaut,” in Proc. IEEE Int. Conf. Robotics and Automation, pp.1713-1718, April 26-May 1, 2004.
[16] B. Choi, S. Lee, H.R. Choi and S. Kang,
“Development of Anthropomorphic Robt Hand with Tactile Sensor : SKKU Hand II,” in Proc. IEEE Int.
Conf. Intelligent Robots and Systems, pp.3779-3784, Oct. 9-15, 2006.
[17] J. Yeda, Y. Ishida, M. Kondo, and T. Ogasawara,
“Development of the NAIST-Hand with Vision-Based Tactile Fingertip Sensor,” in Proc. IEEE Int. Conf.
Robitics and Automation, pp.2332-2337, April 18-22,
2005.
[18] J. Napier, Hands, Princeton Univ. Press, 1993.
[19] S. Arimoto, M. Yoshida, J.-H. Bae, and K. Tahara,
“Dynamic force/torque balance of 2D polygonal objects by a pair of rolling contacts and sensory-motor coordination,” Journal of Robotic Systems, Vol.20, No.9, pp.517-537, 2003.
[20] K. Tahara, S. Arimoto, and M. Yoshida, “Dynamic Object Manipulation using a Virtual Frame by a Triple Soft-Fingered Robotic Hand,” in IEEE Int.
Conf. Robotics and Automation, pp.4322-4327, May 3-8, 2010.
[21] S. Arimoto and M. Sekimoto, “Natural resolution of ill-posed inverse kinematics for redundant robots: A challenge to Bernstein's Degrees-of-freedom problem,”
Journal of Robotics and Mechatronics, Vol.18, No.5, pp.651-660, 2006.
[22] M. Sekimoto and S. Arimoto, “Experimental study on control method for robot arms with redundant joints based upon virtual spring-damper hypothesis,” Journal of the Robotics Society of Japan, Vol.25, No.5, pp.785-791, 2007. (in Japanese)
양 현 대
2008 포항공과대학교 기계공 학과, 전기전자공학과 (공학사)
2008~현재 과학기술연합대학 원대학교 지능형로봇공 학과 석박사통합과정 관심분야 : 로봇 매니퓰레이션, 로봇 메커니즘
박 성 우
2005 동아대학교 기계공학과 (공학사)
2010~현재 과학기술연합대학 원대학교 지능형로봇공 학과 석사과정
관심분야 : 공장자동화, 매니퓰레이션, 로봇핸드, 임 베디드 시스템
박 재 한
1998 동아대학교 전자공학과 (공학사)
2000 부산대학교 전자공학과 (공학석사)
2010 고려대학교 전기전자전 파공학과(박사수료) 2004~현재 KITECH 로봇융합연구그룹 선임연구원 관심분야 : 3차원 정보처리, 인식기반 로봇작업
배 지 훈
1999 명지대학교 전기공학과 (학사)
2001 명지대학교 전기공학과 (석사)
2004 리츠메이칸대학 로보틱 스(박사)
2004~2006 일본 COE프로그램 Post Doctoral Fellow 2006~2008 PIRO 선임연구원
2008~2009 KIST인지로봇연구단 Post-Doc.
2009~현재 KITECH로봇융합연구그룹 연구원 관심분야 : 로봇핸드, 로봇암, 로봇매니퓰레이션, 생
체모방제어
백 문 홍
1982 서울대학교 제어계측공 학과(공학사)
1984 서울대학교 제어계측공 학과(공학석사)
1995 동경대학교 전기전공(공 학박사)
1996~현재 KITECH 로봇융합연구그룹 수석연구원 관심분야 : 로봇비전, 3차원 공간인지