Development of Augmented Reality Walking Navigation App using Dijkstra Algorithm
*
전체 글
*
수치
관련 문서
The objective of this study is to understand the effects of walking activity using fairy tales on the peer competence and emotional intelligence of
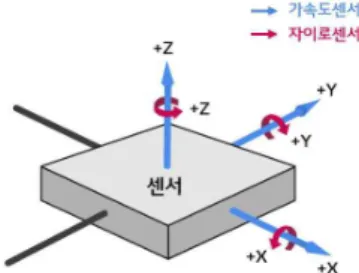
증강현실 (Augmented Reality, AR)은 현실 세계에 3 차원의 가상 이미지를 포개 하나의 영상으로 보여주 는 기술을 말한다.. 새로운 수트를 만들 때도 투명 디스플레이
In addition, using the properties of water shown in diverse shapes, Ki Hyung-do's recognition on the reality and future consciousness from regression of
Kameoka, “Sentinel lymph node biopsy for breast cancer patients using fluorescence navigation with indocyanine green,” World Journal of Surgical Oncology, Vol..
generalized least square algorithm using variograms as weighting functions. With the least square algorithm, the estimate becomes unbiased and its variance becomes
The ability to visualize simulated construction operations in 3D augmented reality can be of significant help in alleviating model engineering problems that
For the system development, data collection using Compact Nuclear Simulator, data pre-processing, integrated abnormal diagnosis algorithm, and explanation
This section describes the overall structure of the diagnostic algorithm for abnormal situations using ANN. 6 illustrates the functional architecture of the diagnostic
