CPS 설계 검증을 위한 DDS 및 DEV&DESS 기반의 실시간 분산 시뮬레이션 방법
김진명1・ 이해영2†・ 전인걸1・ 김원태1
DEV&DESS-Based Real-Time Distributed Simulation Method Using DDS for Design Verification of Cyber-Physical Systems
Jin Myoung Kim ・ Hae Young Lee ・ Ingeol Chun ・ Won-Tae Kim
ABSTRACT
CPS (cyber-physical systems) which consists of connected and diverse embedded systems and physical systems are a new paradigm. Traditional systems were usually considered to be passive and dumb parts in physical systems, but with CPS, we have to take into account what are being moved or changed in the physical systems. So, as increasing the complexity of CPS, potential errors in the systems also increase. In this paper, for enhancing the reliability of CPS, we exploit an executable-model-based design methodology and propose a distributed simulation method to verify the design of CPS. For the design of the systems including discrete and continuous factors, we apply DEV&DESS formalism and simulate models in distributed simulation environments through DDS middleware.
We also illustrate the applications of CPS with our modeling tool.
Key words : Modeling & simulation, DEV&DESS, hybrid modeling, DDS
요 약
CPS는 네트워크로 연결된 다수의 임베디드 시스템들이 물리 시스템과 연동하는 새로운 개념의 시스템 이다. 기존의 시스템 은 일반적으로 물리 시스템 부분을 고려하지 않았다. 그러나 CPS에서 우리는 물리 시스템에서의 변화와 움직임을 고려해야 한다. 따라서 CPS의 복잡도가 증가로 시스템에서 잠재적인 문제 발생 역시 증가 한다. 본 논문에서 우리는 CPS의 신뢰성을 위하여 실행 가능한 모델 기반 설계 방법론을 적용하고 이를 검증하기 위한 분산 실시간 시뮬레이션 기법을 사용한다. 이산과 연속 요소를 갖는 하이브리드 시스템의 설계를 위하여 우리는 DEV&DESS 형식론을 적용하고 DDS 미들웨어 기반 분산 시뮬 레이션 환경에서 시뮬레이션을 수행한다. 또한 우리는 개발한 모델링 도구를 이용한 CPS 응용분야의 모델링 및 시뮬레이션 수행 결과를 보여준다.
주요어 : 모델링 시뮬레이션, DEV&DESS, 하이브리드 모델링, DDS
*본 연구는 지식경제부 및 한국산업기술평가관리원의 산업원천기술개발사업의 일환으로 수행하였음[10035708, 고신뢰 자율제어 SW를 위한 CPS (Cyber-Physical Systems) 핵심 기술 개발].
*이 논문은 2014학년도 서울여자대학교 컴퓨터과학연구소 교내학술연구비의 지원을 받았음.
접수일(2012년 12월 7일), 심사일(2013년 2월 25일), 게재 확정일(2014년 5월 22일)
1)한국전자통신연구원(ETRI) CPS연구실
2)서울여자대학교 정보보호학과 주 저 자: 김진명
교신저자: 이해영 E-mail; [email protected]
1. 서 론
최근 현재의 시스템들은 가상과 현실적인 요소가 동시 에 동작하는 CPS(cyber-physical systems)라는 새로운 아키텍처와 함께 물리적인 요소와 소프트웨어 요소의 복 잡한 통합에 대한 필요성이 증대되고 있다[1]. CPS는 다양 한 응용 도메인 물리 시스템의 안전성, 성능, 신뢰성, 견고 성 그리고 효율성 등을 위하여 컴퓨팅, 통신, 그리고 제어 기술들의 강력한 통합을 요구 한다[2, 3].
기존의 컴퓨팅 시스템, 즉 사이버 시스템은 물리 시스
Fig. 1. DEVS and DESS combinated model 템을 고려하지 않고 설계되어 구현되었다. 그러나 CPS는
매우 지능적인 센서와 액추에이터뿐만 아니라 상당히 엄 격한 성능 제약조건을 갖는다[4]. 따라서 CPS는 물리적 시 스템의 변화와 움직임을 고려하여 사이버 파트를 설계 하 고 구성해 보다 정밀하게 시스템이 동작 되도록 해야 한다. 네트워크 중심 전쟁(network centric warfare) 시스템, 스마트 그리드, 메디컬 시스템 등은 고신뢰성이 요구되는 대표적인 CPS 응용시스템 이다. 특히 CPS 응용 시스템 의 예로 고정익 UAV(unmanned aerial vehicles)에서 내 장 컨트롤러는 동체의 원활한 움직임을 위하여 날개 표면 의 공기흐름을 모니터링 하고 전기기계식 액추에이터 (electro-mechanical actuator)를 통하여 조절 한다[5].
따라서 CPS 응용 시스템의 고신뢰성을 만족하기 위하여 대상 시스템의 개발 초기부터 모델링하고 검증 및 시뮬레 이션을 통해 설계 단계의 신뢰성을 제공해야 한다[5, 6]. 또 한 모델링 언어는 컴퓨팅 요소와 물리 요소를 표현 할 수 있어야 한다.
본 논문에서 우리는 CPS 응용 시스템 설계의 신뢰성 을 위하여 실행 가능한 모델 기반 설계 방법론을 적용하 고 이를 검증하기 위한 분산 실시간 시뮬레이션 방법을 제안 한다. CPS의 컴퓨팅 요소와 물리적 요소를 표현하기 위하여, DEVS(discrete event system specifications)와 DESS(differential equation system specifications)의 혼 합 형태인 DEV&DESS 형식론[7] 기반의 모델링 방법론 을 제안하고 DDS(data distribution Service)[8] 미들에어를 이용한 분산 실시간 시뮬레이션 방법에 대하여 제안 한다. 또한 우리는 Eclipse plug-in 기반으로 개발한 CPS 응용 시스템 모델링과 시뮬레이션 도구에 대하여 소개 한다.
본 논문의 구성은 다음과 같다. 2장은 관련 연구에 대 하여 설명 하고, 3장에서 DDS 기반 분산 시뮬레이션 구 조를 보여준다. 4장은 CPS 응용 시스템에 대한 모델링과 시뮬레이션을 보여주며, 5장에서 결론과 향후 연구 방향 에 대하여 설명 한다.
2. 관련 연구
2.1 DEV&DESS 형식론
DEV&DESS 형식론은 이산 사건 시스템 명세인 DEVS 와 미분 방정식 시스템 명세인 DESS의 조합으로 이루어 졌다[7].
Fig. 1은 DEV&DESS 조합 모델의 구조를 보여준다.
그림에서 X, S 그리고 Y는 각각 입력, 상태, 그리고 출력 을 의미하며, discr과 cont는 각각 이산과 연속을 의미한
다. 따라서 DEV&DESS의 형식론은 <Xdiscr, Xcont, Ydiscr, Ycont, S, δext, Cint, δint, λdiscr, f, λcont> 이다[4].
Xdiscr와 Ydiscr는 이산 이벤트 입력, 출력 집합이다. Xcont
와 Ycont는 연속 이벤트 입력과 출력 집합니다. S는 모델의 상태 집합 이다. δext와 δint는 모델의 외부/내부 상태 전이 함수 이다. Cint는 상태 이벤트 조건 함수이고 λdiscr과 λcont
는 각각 이산과 연속 이벤트 출력 함수 이다. f는 변화율 함수이다.
DEVS 요소와 DESS 요소는 서로 영향을 준다. 예를 들어 DEVS 요소의 δext의 출력 값은 DESS 요소의 f로 입 력 값이 되어 연속 상태의 변화에 영향을 줄 수 있다. 또 한 DESS 요소의 상태의 변화에 따라 DEVS 요소의 δint
가 구동되어 모델에 영향을 줄 수 있다. [7]에서 DEV&
DESS의 간단한 모델인 물통 채움(barrel filler)모델의 동 작을 통해 DEVS 요소와 DESS 요소의 관계에 대해 알 수 있다.
2.2 Data Distribution Service
DDS는 OMG(object management group)에서 새롭게 제정된 표준이다. DDS의 주요 목적은 DCPS(data centric publish/subscribe) 모델로써, 분산 시스템에서 응용프로 그램들이 이종의 플랫폼에서 공통의 데이터에 대한 읽기/ 쓰기를 가능하게 하는 인터페이스를 제공 하는 것이다.
자신 이외의 응용프로그램과 정보 공유를 원하는 응용 프로그램들은 데이터를 배포하기 위한 자신의 목적을 분 류된 토픽에 선언 하면 이 공용 데이터 공간을 사용할 수 있다. 반대로 관심 토픽에 접근을 원하는 응용프로그램들 은 구독자가 되기 위하여 이 공용 데이터 공간을 사용 할 수 있다.
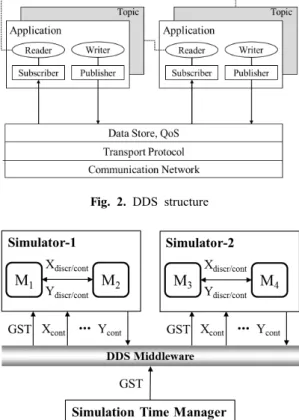
Fig. 2는 DCPS 모델의 기본적인 구조를 보여준다. 각 각의 응용프로그램은 자신이 배포(publish)하는 topic이 있으며 반대로 자신이 다른 응용프로그램으로부터 구독 (subscribe)하는 topic이 있다. 이 그림에서 Writer는 실제
Fig. 2. DDS structure
Fig. 3. DDS based distributed simulations
WHILE LST < Simulation time DO Subscribe GST
IF GSTi ≤ LST < GSTi+1 THEN Execute model
IF GSTi+1 ≤ LST THEN
Waiting and reducing LST step size LST < GSTi THEN
Execute and increasing LST step size END WHILE
Fig. 4. Variation of time interval in GST and LST
데이터를 전송하는 객체이고, 항상 자신이 갖고 있는 특 정 topic과 연결되어 있다. Publisher는 Writer들의 그룹 을 생성하고 관리하는 역할을 한다. Reader는 실제 데이 터를 전달 받는 객체이며 그림에서 점선으로 연결된 다른 응용프로그램의 특정 topic과 연결되어 있다. Subscriber 는 Reader들을 생성하고 관리하는 역할을 한다. Topic은 데이터 타입과 이름으로 구성되며 이것은 Writer/Reader 와 연결되어 있다.
3. DDS 기반 분산 시뮬레이션
3.1 분산 시뮬레이션 구조
CPS 응용 시스템은 다수의 임베디드 시스템이 네트워 크로 연결어 구성된다. 시스템을 이루는 각각의 하위 시 스템들이 매우 복잡하고, 대규모로 구성되기 때문에 단일 시스템에서 시뮬레이션을 통한 모델의 검증은 매우 어렵 다. 따라서 분산 시뮬레이션 환경이 요구 된다.
HLA/RTI가 IEEE 1516 표준으로써 분산 시뮬레이션
에 널리 사용되고 있지만, 실시간이 고려되지 않고 경량 임베디드 시스템에서 동작하기에는 적합하지 않다[9]. 따 라서 우리는 Fig. 3과 같이 DDS를 이용한 분산 DEV&
DESS 기반의 분산 실시간 시뮬레이션 구조를 제안 한다.
STM(simulation time manager)은 원격지의 시뮬레이 터들에게 전역 시뮬레이션 시간 GST(global simulation time)를 배포 하고 원격지의 시뮬레이터들은 GST를 기준 으로 하여 모델을 실행 하고 내부 시뮬레이션 시간 LST 를 조절 한다. 현실 세계에서의 시간을 RT(real-time)라고 하면 STM은 RT의 흐름에 따라 DDS 미들웨어를 통하여 일정하게 원격지의 분산 시뮬레이터들에게 전달된다. 본 논문에서 우리는 Fig. 3과 같이 시뮬레이터 내부에서 모 델들 간의 관계 정의는 DEV&DESS의 결합 모델을 준수 하나, 분산 시뮬레이터들 간의 관계는 연속 요소에 대한 EIC(external input coupling relation)와 EOC(external output coupling relation)로 제한 한다.
3.2 시간 동기화
원격지의 시뮬레이터들은 GST를 기준으로 하여 동기 화 되어야 한다. 그러나 네트워크 트래픽 상태나 서로 다 른 모델의 해상도로 인하여 시뮬레이터들 사이에 시간 동 기화 문제가 발생한다. 따라서 시뮬레이터는 GST에 따라 모델의 실행 및 속도를 제어 할 수 있어야 한다.
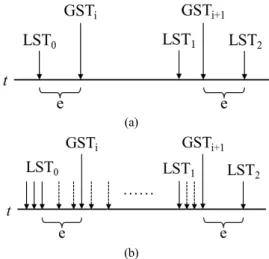
따라서 RT, GST 그리고 임의의 시뮬레이터 내부 시뮬 레이션 시간 LST(local simulation time)에 대하여 분산 시뮬레이터의 이벤트 실행 및 시간의 증가는 Fig. 4와 같 은 구조를 갖는다.
GST는 일정한 간격으로 STM에서 배포되기 때문에 시뮬레이터는 현재 전송받은 GSTi에 대하여 다음에 배포 될 GSTi+1을 알 수 있다. 따라서 시뮬레이터는 GST를 고 려하여 모델을 실행 시키고 내부 시간을 증가 시킨다. 그
(a)
(b)
Fig. 5. Variation of time interval of LST for simulation time synchronizations
Fig. 6. Combat systems modeling Fig. 7. Visualization of simulation results 러나 LST가 GSTi 보다 늦거나 GSTi+1 보다 빠를 경우에
는 시뮬레이터의 모델 실행 속도를 조절해야 한다. 미분 방정식으로 표현된 모델의 해석을 위하여 우리는 오일러 방법(Eular’s method)을 이용하며 오일러 방법에 서 미분 방정식을 해석하기 위한 시간 간격의 변화를 통 해 시뮬레이션 속도를 조절한다. 미분 방정식을 해석하는 데 있어 시간의 간격이 작을수록 해의 오류가 적어지고 연산 횟수가 증가하며 시뮬레이션 속도가 늦어진다. 반대 로 시간의 간격이 커질수록 해의 오류가 커지고 연산 횟 수가 감소하며 시뮬레이션 속도가 빨라진다. 우리는 미분 방정식으로 표현된 모델의 연속요소를 실행하기 위한 해 석 시간 간격의 최대값과 최소값은 해당 시스템 전문가에
의해서 시스템의 모델링 단계에서 결정된다고 가정한다.
시뮬레이션 수행 중 Fig. 5와 같이 시간 동기화 문제가 발생 할 수 있다. Fig. 5(a)에서 시뮬레이터가 GSTi를 수 신 하였을 때, 현재 시간이 LST0 이고, GSTi > LST0 이 고 GSTi – LST0 = e 이면, 시뮬레이터의 시간이 GST 보 다 늦기 때문에 보다 빠르게 동작해야 한다. 따라서 LST 의 스텝 간격은 e를 고려하여 Fig. 5(b)와 같이 증가해야 한다. 그러나 현재 시간이 LST1 이고, 다음 이벤트 발생 시간 LST2에 대하여 LST2 > GSTi+1 이고, LST2 – GSTi+1 = e 이면, 시뮬레이터의 시간의 GST 보다 빠르기 때문에 보다 느리게 동작해야 한다. 따라서 LST1 다음부 터 스텝 간격은 e를 고려하여 Fig. 5(b)와 같이 감소해야 한다. 따라서 LST의 간격은 다음과 같이 결정 된다.
±
위의 수식에서 LST가 GSTi 보다 작을 경우 시뮬레이 션이 보다 빠르게 수행되어야하기 때문에 +e가 되며, LST가 GSTi+1 보다 클 경우 시뮬레이션이 보다 느리게 수행되어야하기 때문에 –e가 된다.
4. CPS 응용 모델
본 논문에서 우리는 CPS 응용 분야 중 하나인 전장 시 스템을 대상으로 모델을 구축 하였다.
Fig. 6는 대상 시스템에 대한 모델 구조를 보여준다.
그림과 같이 전장 시스템 모델은 환경 모델과 다수의 객 체 모델 그리고 각각의 객체 모델에 대한 시나리오 모델 로 구성된다.
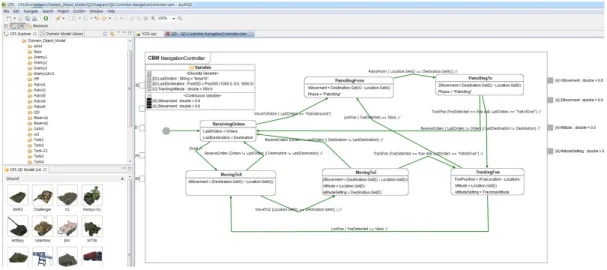
Fig. 8. Combat systems modeling using DVML
환경 모델은 지형 환경 정보와, 객체 모델들 간의 통신 을 담당 한다. 모델은 이름, 속도, 상태, 2차원 위치, 방향 을 출력하여 환경 모델의 외부 상태 전이 함수로 전달되 고, 환경 모델은 높이지도(height map)을 이용하여 등판 각도(hill degree)와 모델의 3차원 위치, 적의 위치를 출력 하여 모델의 외부 상태 전이 함수로 전달된다. 시나리오 는 [시간, 명령, 위치] 형태의 데이터구조를 갖고 있다. 시 간은 시뮬레이션 시간이며, 명령은 해당 모델이 수행 할 수 있는 정찰, 공격, 침투 등의 명령들로 구성 된다. 위치 는 3차원 좌표로 전달된다. 따라서 특정 시간이 되면, 시 나리오 모델은 해당 시간에 대한 명령과 좌표를 모델의 외부 상태 전이 함수로 전달되어 모델을 구동시킨다.
그러므로 전장 환경을 구성하는 모든 객체들은 Fig. 6 과 같이 환경 모델과 coupling 되어 있으며 환경 모델은 외부 상태 전이 함수를 통하여 객체 모델들로부터 전달 받은 데이터를 기반으로 로그 데이터를 생성 하고 Fig. 7 과 같이 시각화 재생기를 통하여 시뮬레이션 결과를 시각 적으로 재생 하게 된다.
Fig. 8은 CPS의 시각적 모델링을 위해 Eclipse plug-in 기반으로 개발된 모델링 도구 이다[10].
5. 결 론
CPS는 높은 신뢰성을 갖는 복잡한 시스템으로 센서와 액추에이터를 갖는 물리적인 요소와 이것들을 제어하는 컴퓨팅 요소의 조합 이다. CPS의 구현 과정에서, 시스템 의 복잡도로 인하여 모델 기반으로 시스템을 설계 하고
구현 이전에 시뮬레이션을 통하여 모델의 적합성을 검증 을 해야 한다.
본 논문에서 우리는 CPS 응용 시스템 설계의 신뢰성 을 위하여 DEV&DESS 형식론 기반의 모델링 방법론을 제안 하였으며, 시뮬레이션 수행을 위하여 DDS를 이용한 실시간 분산 시뮬레이션 프레임워크를 제안하였다. 또한 모델링의 편의성을 위하여 시각화 모델링을 위한 Eclipse plug-in 기반의 모델링 도구를 개발하였다.
향후 연구 과제로써 분산 시뮬레이션 환경에서서 HILS (hardware-in-the-loop simulation)을 수행할 수 있는 구 조와 도구를 제안 및 개발 하고 기존의 DDS 기반 분산 시뮬레이션 구조와 비교 분석 할 것이다.
References
1. Janos Sztipanovits, “Composition of Cyber-Physical Systems,” Engineering of Computer-Bused Systems ’07, 2007.
2. R. Rajkumar, I. Lee, L. Sha, and J. Stankovic, “Cyber- physical systems: The next computing revolution,“ 47th Design Autom. Conf., pp. 731-736, 2010.
3. Kyoung-Dae Kim and P. R. Kumar, “Cyber-Physical Systems: A Perspective at the Centennial,“ Proceedings of the IEEE, vol. 100, special issue, pp. 1287-1308, 2012.
4. R. Poovendran, “Cyber-Physical Systems: Close Encounters Between Two Parallel Worlds,“ Proceedings of IEEE, vol 98, no. 8, pp. 1363-1366, 2012.
5. Gabor Karsai and Janos Sztipanovits, “Model-Integrated
김 진 명 ([email protected]) 2014 성균관대학교 컴퓨터공학과 박사
2010~현재 한국전자통신연구원 CPS연구실 연구원 관심분야 : 모델링 및 시뮬레이션, 가상-물리 시스템, 정보보호
이 해 영 ([email protected])
2003 성균관대학교 정보통신공학부 학사 2009 성균관대학교 컴퓨터공학과 박사
2009~2013 한국전자통신연구원 CPS연구실 선임연구원 2013 서울여자대학교 정보보호학과 조교수
관심분야 : 모델링 및 시뮬레이션, 가상-물리 시스템, 정형 검증, 무선 센서 네트워크
전 인 걸 ([email protected]) 2011 성균관대학교 컴퓨터공학과 박사
1998~현재 한국전자통신연구원 CPS연구실 책임연구원
관심분야 : 가상-물리 시스템, 자율제어 컴퓨팅, 임베디드소프트웨어
김 원 태 ([email protected]) 2000 한양대학교 컴퓨터공학과 박사
2005~현재 한국전자통신연구원 CPS연구실 책임연구원
관심분야 : 가상-물리 시스템, 실시간 통신, 자율제어, 고신뢰 소프트웨어 Development of Cyber-Physical Systems,” LNCS 5287,
pp.46-54, 2008.
6. Edward A. Lee, “Cyber physical Systems: Design challenges,” ISORC, pp.363-369, 2008.
7. Bernard P. Zeigler, Herbert Praehofer, Tag Gon Kim,
“Theory of Modeling and Simulation”, Academic Press, San Diego, 2000.
8. OMG, “Data Distribution Service for Real-time Systems Specification”, OMG, 2007.
9. A. J. J. Lemmers, P. J. Kuiper, F. R. Verhage, “Performance of a Component-based Flight Simulator Architecture Using the HLA Paradigm”, AIAA Modeling and Simulation Technologies Conference and Exhibit, NLR-TP-2002-470, 2002.
10. H. Y. LEE, I. G. Chun and W. T. Kim, “DVML: DEVS- Based Visual Modeling Lanugage for Hybrid System”, CCIS, vol. 256, pp. 122-127, 2011.
![Fig. 1. DEVS and DESS combinated model템을 고려하지 않고 설계되어 구현되었다. 그러나 CPS는 매우 지능적인 센서와 액추에이터뿐만 아니라 상당히 엄격한 성능 제약조건을 갖는다[4]](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5101423.571557/2.808.429.725.108.260/combinated-model템을-고려하지-설계되어-구현되었다-지능적인-액추에이터뿐만-제약조건을.webp)