선박 의장 검사를 위한 공존현실 기술 적용에 관한 연구
하연철1, 김진우1, 김구1*, 신현실2
1부산대학교 선박해양플랜트기술연구원, 2(주)아이소프트
A Study on the Implementation of Coexistent Reality Technology for Ship Outfitting Inspection
Yeon-Chul Ha1, Jin-Woo Kim1, Goo Kim1*, Hyun-Shil Shin2
1The Korea Ship and Offshore Research Institute
2I-SOFT Co.Ltd
요 약 조선소에서는 선박 건조 시 설계 및 각 선체 블록의 제작 조립 후 선행의장이라는 것을 실시한다. 선행의장은 선체를 제외한 다른 부품, 장비들을 탑재하는 것을 의미하는데, 이 과정에서 블록 내 존재하는 파이프 및 다양한 장비들의 체결이 각 블록 간 조립 시 정확히 이루어지지 않는다면 오작업 및 그에 따른 생산품질 저하와 재작업 등에 따른 막대한 비용이 발생한 다. 또한 이미 완료한 의장작업이라도 파이프 및 내부 자재 공간배치 등의 문제 발생 시 재작업에 따른 선박 생산효율이 나빠 진다. 따라서 본 연구에서는 이러한 문제점 해결을 위해 3D 설계도면을 이용하여 공존현실 기술을 기반으로 한 선체의장 작 업 전후 공간 배치 및 검사 시스템에 대해 소개하고자 한다. 본 연구에서 개발 및 소개한 다양한 공존현실 알고리즘 및 검사 시스템은 국내에는 도입이 전무한 AR 서비스를 기반으로 하고 있으므로 조선 선박제조 공정뿐 아니라 자동차, 건축 등 설계 도면을 이용한 다양한 제조 산업 분야에 널리 적용 가능할 것으로 사료된다.
• 주제어 : 공존현실, 선체의장검사, 산업용 증강현실, 공간인식 알고리즘, 다중 마커
Abstract In shipyards, internal materials are assembled after designing and manufacturing each ship’s block. Internal material assembly means the installation of parts and equipment except ship’s body. In this process, if the assembly of pipes and equipment existing in the block is not done correctly during the assembly between blocks, this causes a lot of costs. In addition, even if the assembly of the internal materials already completed, the production efficiency of the ship is reduced due to rework when problems such as space arrangement of the internal materials occurs.
Therefore, this study introduces space arrangement and inspection system before and after hull outfitting work based on coexistence reality technology using 3D design drawing to solve these problems. The various coexistence reality algorithms and inspection systems developed and introduced in this study are based on AR service, which has never been introduced in Korea. So it will be widely applicable to various manufacturing industries using design drawings such as automobiles and architectures as well as ship building process.
• Key Words : Coexistent reality, Hull outfitting survey, Industrial AR, Space recognition algorithm, Multi-markers
Received 11 January 2020, Revised 24 February 2020, Accepted 27 March 2020
* Corresponding Author Goo Kim, The Korea ship and Offshore Research Institute, Pusan National University, 2, Busandaehak-ro, Geumjeong-gu, Busan, Korea. E-mail: [email protected]
Ⅰ. 서론 1.1 연구의 배경 및 목적
현재 우리나라의 선박 건조 기술은 세계적인 위치 에 올라와 있다고 할 수 있다. 선박 건조를 위한 열, 유체공학 등을 기반으로 한 설계 및 설계 기반의 블록 조립, 선행의장을 거쳐 도장에서 안벽의장에 이르기까 지 우수한 노하우와 기술력을 바탕으로 하고 있다. 그 러나 이러한 선박 건조의 과정 중에 발생되는 중간 및 최종 산출물의 검사/검수에 대해서는 아직까지도 실무 및 오랜 경험자의 육안 검수에 의존하고 있다[1].
철저한 설계 기준에 따른 3D 설계도면 기반의 시뮬 레이션을 실시하여 선박 블록 등의 제작 및 조립을 한 다고 하여도 사람에 의해서만 제작되는 선박이며, 종 이로 출력한 설계도면으로 검사/검수 실시를 하다 보 니 다양한 조립 및 제작 과정에서의 오류 등은 피할 수 없는 것이 사실이다. 그로 인해 오류 등에 따른 재 작업을 통한 시간적, 경제적 피해가 발생할 수 있으며, 나아가 선박 생산 품질 등의 저하에 따른 기업 경쟁력 하락마저 초래할 수 있다.
1.2 연구의 범위 및 내용
따라서 본 논문에서는 이러한 문제점 해결을 위해 선박건조에 필요한 3D 설계도면과 공존현실 기술을 이 용하여 사람의 육안 검수가 아닌 HMD(Head Mounted Display)를 통한 자동화된 선체의장 검사 시스템에 대 해 소개하려고 한다.
본 논문의 제2장에서는 시스템의 핵심기술인 공존 현실에 대한 소개 및 연구 동향, 제3장에서는 선체의 장 검사 시스템의 전체적인 개요, 구성 및 기능, 제4장 을 통해서는 3D 설계도면 기반의 AR 객체를 활용하여 선체의장 검사를 위한 기법 및 알고리즘의 구현/개발 과 그에 따른 결과물을 보여주고 있다. 끝으로, 제5장 에서는 결론을 제시한다.
Ⅱ. 공존현실 기술 연구 동향 2.1 공존현실의 개념
혼자 사용하는 가상현실, 증강현실, 혼합현실을 벗 어나, 서로 다른 곳에 있는 사용자들이 네트워크를 통 해 상호 소통하고 정보를 공유하여 자연스럽게 인터랙 션하고 협업할 수 있는 ‘공존현실’ 개념이 제시되었 다[2]. 서로 다른 지역에서 네트워크로 연결된 다수의 사용자들이, 정보, 4D+감각, 감성, 의도(운동), 경험 등 을 실시간 소통 및 공유하고 상호 인터랙션 및 협력 (협업) 할 수 있는, 현실-가상-원격 공간이 구분 없이 연결된 일체화된 공간을 ‘실감교류 인체감응 확장 공 간(Coexistent Space)’으로 새롭게 정의하고, 그 안에 서 다른 사람들과 함께 느끼는 공존감과 리얼리티를
‘공존현실(Coexistent Reality)’로 정의하였다. 많은 사람들에게 잘 알려진 영화 킹스맨(Fig. 1)에서 여러 사람들이 자신의 아바타를 보내 함께 모험하거나 회의 하는 모습으로 나타날 것이다. 현재 스마트폰에서 실 행되는 카카오톡 혹은 페이스북과 같은 소셜 네트워크 서비스를 넘어서는 새로운 모습으로 발전할 것으로 기 대된다[3].
Fig. 1. Example of coexistent reality(Kingsman, 2015)
2.2 공존현실 기술 적용 사례 및 연구 동향
증강현실(Augmented Reality)은 가상현실(Virtual Reality)과 달리 현실 세계에 가상의 객체를 이음새 없 이 실시간으로 정합하여 보여줌으로써 사용자가 현실 세계에서 가상의 객체를 통하여 여러 가지 부가적인 정보를 얻을 수 있는 기술이다[4-6]. 사용자는 증강현 실로 현실의 이미지나 배경에 3차원 가상 이미지를 겹 친 하나의 영상을 획득할 수 있다. 이러한 정보를 기 반으로 응용 분야가 모바일에서 게임, 교육 등으로 확 장됨으로 여러 분야에서 능동적으로 상호작용할 수 있 으며, 참여자 중심의 응용 연구가 이루어지고 있다 [7-8].
국내의 공존현실 기술 및 연구의 대표적인 사례로 서 4D+ SNS 플랫폼과 공존현실 소프트웨어 프레임워
크를 들 수 있다.
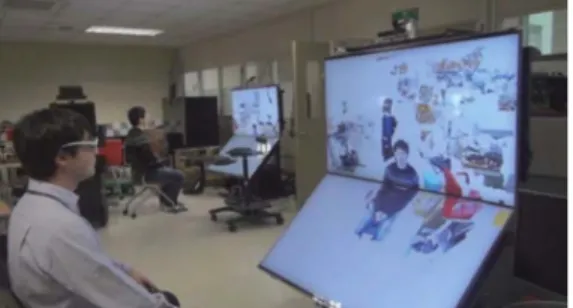
4D+ SNS 플랫폼은 카카오톡, 페이스북 등 기존 SNS 도 문자, 사진, 동영상 등을 공유할 수 있지만 사용자 들의 공간과 감각을 실시간 공유하는 것에 한계가 있 고, 기존 가상현실(VR) 서비스도 혼자 체험하는 것이 대부분으로 다수 사용자들이 동시에 체험하고 소통하 는 데 한계가 있다는 것에 착안하여, 이러한 한계를 극복하기 위해 다수 사용자들이 공존현실에서 공간과 감각정보를 실시간 공유하고 소통함으로써, 원격 회의, 가상 쇼핑(Fig. 2), 미니 게임 등을 함께 할 수 있도록 다양한 협업 콘텐츠를 제공할 수 있는 서비스 플랫폼 이다[9].
Fig. 2. Example of 4D+ SNS, shopping
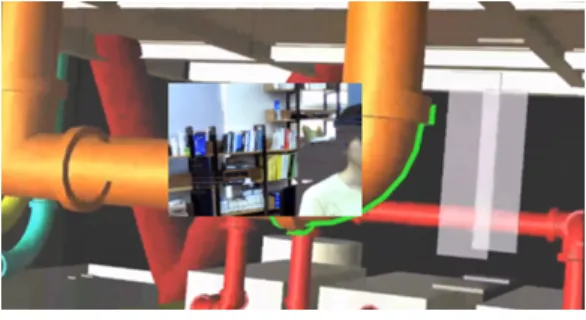
공존현실 소프트웨어 프레임워크는 대용량 영상/음 성 및 제어 데이터의 다수 사용자 간 실시간 전송 네 트워크, 3D 그래픽 렌터링, 물리 엔진, 신개념 사용자 인터페이스 등을 지원하는 원격 소통/공유 및 협업을 위한 소프트웨어 프레임워크이다. 재사용 가능한 플러 그인 방식의 애드온 소프트웨어 모듈을 기반으로 확장 성을 제공하고, 서로 떨어져 있는 원격 사용자들이 3D 영상과 음성으로 소통하고, 가상 정보를 함께 공유하 고 조작하며, 4D+ 감각을 상호 동기화하여 전달하고 공유하게 하는 기술을 담고 있다[10].
Fig. 3. Example of Coexistent Reality S/W Framework
Ⅲ. 시스템 개요 3.1 시스템 구성
본 연구에서는 선박 선체/블록 제조업 사업장을 대 상으로 AR 기술을 활용한 공존현실 기반의 3D 설계도 면을 이용하여 의장작업 공간 배치/검사를 통해 생산 품질 향상 및 오작업 방지에 따른 생산효율성 제고 등 을 활용 목표로 하는 통합 서비스 시스템 개발을 소개 한다. Fig. 4는 시스템의 전체적인 구성도 및 기능, 그 리고 실제로 구현 개발한 화면(우)이며 상세한 설명은 다음 장을 통해서 하겠다.
Fig. 4. System overview
조선공정 프로세스 중 제작된 각 블록의 조립 후 내부 자재의 결합/체결을 수행하는 선행의장 공정 부 분에서 HMD를 착용한 작업자는(현장 관리자) 공존현 실 기술 및 관리자와의 실시간 인터랙션을 통해 내부 자재를 설치할 공간에 대한 명확한 확인 및 배치, 기 설치된 자재의 오작업 등의 실시간 파악을 통해 빠르 게 추가 작업 및 개선을 실시할 수 있다. 이로 인해 전체 선박건조 작업시간 단축에 따른 선박의 품질 및 생산효율성 향상을 실현할 수 있으며, 나아가 우수 품 질의 선박건조라는 기업 이미지 제고에 기여할 수 있 다.
3.2 시스템 기능
본 장에서는 선체의장 시스템이 갖는 기능들에 대 해 소개하고자 한다. 시스템은 종합적인 운영 및 관리/
관제를 위한 부분과 3D 설계도면 기반의 AR 객체 활 용을 위한 알고리즘으로 구성되었는데, 알고리즘은 제
4장을 통해 상세하게 소개하겠다. Table 1은 시스템의 주요 기능과 그에 따른 상세이다.
Main function Parameter
Total operation management and
control
-Video and audio two-way communication support
-RVM to FBX conversion function
Interactive drawing through image
-Video drawing function -Image processing filter function -Calculation function between the constituent objects of the hull design block
Hull outfitting process support AR
simulation
-1:1 matching and display of the space inside the ship and the virtual space
-Interaction function that allows workers to request information necessary for the hull outfitting process through (HMD) HoloLens API
-Virtual simulation of the sequential construction of the hull outfitting facility process
-Ability to request revision for the occurrence of problems such as spatial interference or restrictions of the hull outfitting
IoT device management
middleware
-IoT device management service function that connects BackEnd and FrontEnd
-AR data management interface and communication function
Hull outfitting survey platform
-Management of 3D design data (IGS, DXF, etc.) by ship type and measurement data (MES, etc.) -Augmented with AR through the hull space/virtual space 1:1 matching processing algorithm, and operator movement calculation function through marker tracking
-File management function for providing hull outfitting and drawing information, error calculation by comparing design and measurement data, and statistical analysis data management using error information for each area and operation
-Process sequence and design location through 3D simulation management, problem reporting and improvement
Table 1. Main function and detailed description of the system
다양한 기능들 중에서 본 시스템을 활용 도입할 조 선소의 경우 고정된 파일 포맷으로 운영되고 있는데, 그러한 포맷을 시스템의 입력으로 하기 위한 파일 컨 버팅 기능과 현 시스템에서 채택하고 있는 Microsoft의 홀로렌즈 외 다양한 이기종 IoT 디바이스의 지원을 가 능하게 하는 관리 미들웨어는 실제 도입 활용을 위한 조선소 현장의 요구사항을 반영한 것이다.
Fig. 5는 홀로렌즈를 통한 작업자, 관리자 간 상호 인터랙션 기능의 실제 동작 화면이다. 그림 중앙에 보 이는 사무실 관리자의 모습을 홀로렌즈를 통해 작업자 는 볼 수 있으며 음성 양방향 통신 또한 가능하다.
Fig. 5. Interaction between worker and managers through the Microsoft Hololens
Ⅳ. 시스템 주요 알고리즘 구현
본 연구에서 개발한 시스템에는 AR 기술이 사용되 는 공존현실 기반의 많은 알고리즘 및 기법이 들어있 다. 본 장에서는 대표적으로 AR 기반 선체 내부 공간 인식 알고리즘과 목표 마커의 특징점이 훼손되어도 용 인하여 3D 객체의 증강을 가능하게 하는 기법에 대해 소개한다.
4.1 AR 기반 선체 내부 공간인식 알고리즘
4.1.1 마커 기반의 홀로렌즈 카메라 위치 추정
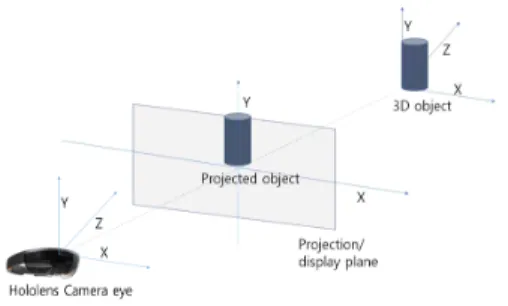
본 시스템은 마커 기반 증강현실로 화면에 보이는 마커를 통해 3D 좌표계에서의 홀로렌즈의 카메라 위치 와 자세를 계산한다. 3D 좌표계에서의 마커 네 점의 위치 정보와 홀로렌즈 카메라의 2D 이미지 좌표계에서 의 마커 네 점의 매칭 정보로 solvePnP(solve Perspective – n - Problem)를 통해 홀로렌즈 카메라의 위치와 자세를 계산할 수 있다. solvePnP는 Fig. 6과
같이 카메라 이미지 좌표계 안에 있는 2차원 점과 월 드 좌표계의 3차원 점의 매칭 관계를 이용하여 홀로렌 즈 카메라의 위치와 방향 정보를 알아낼 때 사용한다.
이 기술을 사용하기 위해서는 이미지 좌표계에 해당하 는 2차원 점 4개와 3차원 월드 좌표계의 점 4개, 그리 고 해당 홀로렌즈 카메라의 내부 파라미터(intrinsic parameter)와 왜곡계수(distortion coefficient)가 필요하 다. 이 값들과 마커에 설정된 절대좌표를 기준으로 사 용자의 위치를 알 수 있게 해주는 회전 벡터와 평행이 동 벡터 행렬(rvec, tvec)이 반환된다. 반환된 행렬 정 보를 이용하여 3D 좌표에서 홀로렌즈 카메라 위치와 자세를 계산한다. 실제 회전 변환 행렬은 회전변환에 대한 rodrigues 표현이다. 따라서 rodrigues 표현을 회 전 변환에 대한 행렬로 변환한다.
Fig. 6. Matching of 3D points in world coordinate system to 2D points in the image coordinate system
반환받은 회전 벡터와 평행이동 벡터 행렬을 사용 하여 3D 공간의 한 점 P에 대한 월드 좌표와 2D 홀로 렌즈 카메라 좌표계에서 대응하는 좌표 사이는 아래와 같은 식에 의해 변환 관계를 계산한다.
(1)
P에 대한 월드좌표는 라 하고 이
점에 대해 2D 카메라 좌표계에서 대응하는 좌표는
이다. 식 (1)은 를 행렬을 통해 관계를 표현하는 수식이다.
월드 좌표계에서 카메라의 월드좌표계 상의 위치
는 카메라 좌표계의 원점에 대 응하는 점이다. 식 (2)를 통해 각 사용자에 해당하는 홀로렌즈 카메라 좌표의 위치를 얻을 수 있으며, 해당
홀로렌즈 카메라 위치와 원점을 기준으로 물체를 증강 한다[11].
(2)
4.1.2 Optical flow
optical flow는 인접한 두 프레임 사이에서 각 픽셀 사이의 속도 벡터를 계산하여 움직임 패턴을 계산한다.
Lucas-Kanade optical flow는 한 프레임에서 추적하고 자 하는 특징점 주변에 윈도우를 씌워 그 안에서 움직 임 패턴을 추적한다[12]. 하지만 윈도우보다 큰 움직임 이 발생하는 경우에는 움직임을 계산하지 못하는 문제 점이 있어, 이를 보완하기 위해 pyramidal Lucas-Kanade optical flow를 사용한다. 원본 영상으로부터 다양한 스 케일의 이미지 피라미드를 구성하여 윈도우 내의 특징 점을 매칭하기 때문에 커다란 움직임에도 비교적 강인 하다는 장점이 있다. 큰 움직임에서도 마커를 추적하 기 위하여 pyramidal Lucas-Kanade optical flow를 사용 하였다[13]. 개발한 선체의장 검사 시스템에서는 모든 특징점을 추적할 필요가 없어 검출된 마커의 네 점만 을 추적하였다.
4.1.3 다중 마커를 이용한 선체 내부 공간인식 알고리즘 AR 기반 선체 내부 공간인식 알고리즘에서는 조선 소 야외 야드라는 공간적 제약사항에 의해 단일 마커 를 통한 선박 객체 증강에 많은 어려움이 있다. 실외 이며 선박 건조를 위한 많은 철판, 파이프 등의 부자 재에 의해 마커의 일부가 가려지거나 날씨 등의 이유 로 훼손됨으로 인해 마커 정보 추출이 불가능한 경우 알고리즘의 구동 및 시스템 전체와의 연동이 불가능하 다는 단점을 가지고 있다. 또한 넓은 야드라는 특징상 단일 마커를 이용한 다수 특징점 추출이 사실상 불가 능하기 때문에 다중 마커의 코너 포인트를 특징점으로 이용하였다. 따라서 본 시스템에서 개발한 공간인식 알고리즘은 야외이고 넓은 공간에서의 객체 증강을 위 해 단일 마커가 아닌, Fig. 7과 같은 3개 다중 마커를 이용하였다.
Fig. 8은 홀로렌즈를 착용한 작업자가 야드에 나가 지정 위치(Init. zone) 한 곳에서 다중의 마커를 주시, 각 마커의 특징점 추출을 통한 선체 내부 공간과 가상 의 공간을 1:1로 매칭 후 다운로드 및 객체의 증강을 실시하는 내부 공간인식 알고리즘의 개발 순서도이다.
Fig. 7. Augmenting 3D objects with multi-markers (left) Real world (right) Virtual object
Fig. 8. Flowchart of space recognition algorithm
그리고 선체 내부 공간인식 알고리즘에서는 가상 객체 다운로드 시 실제 객체와의 위치 오차를 줄이기 위해 Vuforia 엔진 라이브러리를 이용하여 3개의 마커 를 임포트한 후 마커 각각의 위치에 대비해 객체를 위 치시키고 그 3개 마커의 위치 평균값을 계상하는 기법 을 사용하였다. Fig. 9는 이러한 기법을 적용하여 객체 를 증강시킨 것이다.
Fig. 9. Space recognition algorithm using Vuforia engine library
4.2 목표 마커의 특징점 훼손 용인 기법
4.2.1 Perspective matrix
입력 영상의 사각형 마커를 인식하기 위해서는 검 출된 사각형 마커의 영상을 추출하여 정사각형 또는 직사각형 식의 표준형으로 바꿔줘야 한다. 현재 마커 에서는 100x100(㎜)의 정사각형을 기준으로 하고 있다.
입력 영상의 사각형 꼭짓점과 저장된 사각형 패턴 4점 을 이용하여 기준 패턴의 형태로 변경해 줄 수 있다.
입력 패턴 한 꼭짓점의 좌표를 X라고 하고 저 장된 사각형 패턴의 대응되는 한 꼭짓점을 X 라 한다면, 다음과 같은 결과를 가질 수 있다.
(3)
식 (3)에 각각의 입력 영상의 사각형 꼭짓점과 저장 된 사각형 꼭짓점을 넣음으로 인해 값 을 통한 normalize를 구현할 수 있다.
이 장에서는 perspective matrix를 이용한 멀티 마커 추정방법을 소개한다. perspective matrix는 위 normalize 에서 사용한 행렬을 뜻한다. 이는 다른 연산이 없기 때 문에 빠르게 멀티 마커를 추정할 수 있게 하는 것이 특징이다.
Fig. 10에서처럼 실제 사용되는 멀티 마커로, 현실 세계에서는 마커의 상대가 되는 절대 좌표를 이미 알 고 있다. 절대 좌표를 알기 때문에 절대 좌표를 기준 으로 상대적으로 원하는 좌표를 빼주게 되면 추정하고 싶은 상대 좌표를 구할 수 있게 된다. 이렇게 구해진 값을 이용하여 perspective matrix에 각 마커를 기준으 로 한 상대 좌푯값을 곱해 원하는 추정 좌표를 구할 수 있다[14].
Fig. 10. Absolute position for the multi-markers
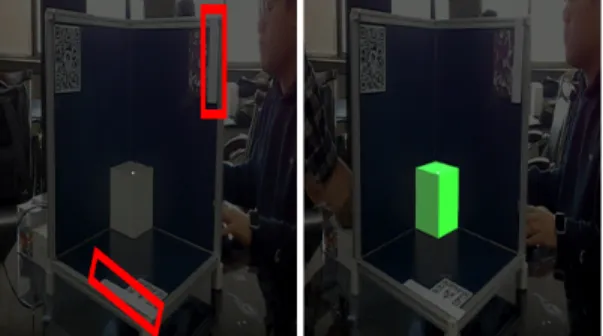
4.2.2 다중 마커의 훼손 용인 구현
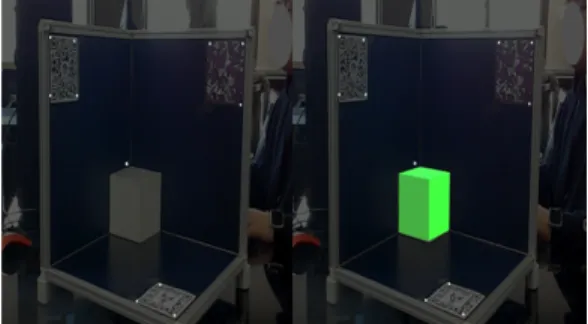
본 장에서는, 위와 같은 추정 기법 적용을 통해 실 제로 다중 마커 중 임의로 일부를 훼손시켜 특징점을 잃게 한 후 남은 마커 코너의 특징점만으로 가상객체 의 증강 실현을 위해 구현, 테스트한 결과를 소개한다.
Fig. 11. Acceptance for damage of multi-markers (left) Real world (right) Virtual object
Fig. 11의 왼쪽은 현실세 계에서의 3개 다중 마커 중 2개 마커에 임의 훼손을 주어 특징점을 잃게 한 것 이다. 총 12개의 다중 마커 특징점 중 4개의 일부 특 징점을 잃어버리더라도 이미 알고 있는 절대 좌표를 기준으로 상대 좌표를 계산하여 Fig. 11의 오른쪽과 같 은 가상객체의 증강 결과를 구현하였다.
Ⅴ. 결론 및 고찰
본 논문에서는 AR 기술을 활용한 공존현실 기반의 선체의장 검사 시스템 개발에 대해 소개하였다. 그리 고 해당 시스템의 주요한 기능 및 기능 구현을 위해 적용된 알고리즘과 기법을 살펴보았다. 선박 건조 시 해당 시스템이 조선소 야드에서 사용된다는 공간적 제 약에 의해 다중 마커 도입에 따른 가상 객체의 증강을 실현하였으며, 나아가 야외에서 발생할 수 있는 마커 훼손을 용인하기 위한 기법을 개발 및 테스트하였다.
해당 시스템의 개발 및 구현은 야외의 날씨 등과 같은 수많은 변수를 가진 상황에 대해서 보다 다양한 알고리즘과 기법에 대한 연구를 필요로 한다. 마커 및 특징점의 수를 줄여나간다든지, 시스템 사용 시간대 별 조도 변화에 의한 마커 훼손에 따른 인식률 등, 추 가적인 연구개발이 지속적으로 진행된다면 선체의장 검사 시스템의 고도화를 이룰 수 있을 것이다.
본 논문에서 개발 및 소개한 선체의장 검사 시스템 은 조선소와 같은 3D 설계도면을 활용한 자동차, 건축 등의 다양한 산업군에 응용, 도입될 수 있다. 또한 그 러한 산업군의 생산효율성 증대실현을 통한 기업 경쟁 력 제고에도 기여할 수 있을 것으로 사료된다.
ACKNOWLEDGMENTS
이 논문은 2019년도 정부(과학기술정보통신부)의 재원 으로 정보통신기획평가원의 지원을 받아 수행된 연구 임(2019-0-0107, 공존현실 기반의 3D 설계도면을 이용 한 선체의장 검사 시스템 개발).
REFERENCES
[1] Research on improvement of standards for inspection and management evaluation of Cruise Ship and Ferry, MPSS, Sejong, 2016.
[2] B. J. Yoo, “Human body sensation solution for the integration of reality and virtual,” KROS. Robot and Human, vol. 8, no. 4, pp. 3-6, 2011.
[3] B. J. Yoo, “Virtual reality, augmented reality and mixed reality overview,” KROS. Robot and Human, vol. 15, no. 4, pp. 3-7, 2018.
[4] A. K. Paul, M. K. Islam, J. H. Min, Y. B. Kim, J. H.
Baek, "Natural object recognition for augmented reality applications," Journal of the Institute of Convergence Signal Processing, vol. 11, no. 2, pp. 143-150, 2010.
[5] R. T. Azuma, "A survey of augmented reality,"
Teleoperators and Virtual Environments, vol. 6, no. 4, pp. 355-385, 1997.
[6] K. W. Choi, D. U. Jung, S. H. Lee, J. S. Choi,
"Interaction augmented reality system using a hand motio," Korea Multimedia Society, vol. 15, no. 4, pp.
425-438, 2012.
[7] T, Nilsen, J. Looser, “Tankwar tabletop war gaming in augmented reality,” in 2nd International Workshop in Pervasive Gaming Applications, Gen Con, Indy, pp.
243-244, 2005.
[8] G. Y. Seo, "A study on the utilization methods of educational content based on the analysis of mobile games," Digital Contents Society, vol. 14, no. 2, pp.
125-134, 2013.
[9] Development of 4D+ SNS platform based on coexistence reality, MSIT, Sejong, 2019.
[10] Coexistence reality software framework, CHIC, Seoul, 2014.
[11] J. W. Moon, D. W. Park, H. S. Jung, Y. H. Kim, S.
S. Hwang, "An image-based augmented reality system for multiple users using multiple markers," Korea Multimedia Society, vol. 21, no. 10, pp. 1162-1170, 2018.
[12] Optical flow, OpenCV, 2017. Available:
https://docs.opencv.org/3.3.1/d7/d8b/tutorial_py_lucas_kana de.html
[13] Pyramidal implementation of the Lucas Kanade feature tracker description of the algorithm, Intel Co., Santa Clara, Calif, 1999.
[14] H. H. Ki, "Techniques on multi-marker for the implementation of augmented reality," Korea Society of Computer and Information(JKSCI), vol. 15, no. 11, 2010.
저자 소개
하 연 철 (Yeon-Chul Ha)
2000년 2월 : 창원대학교 전자공학과(공학석사) 2007년 8월 : 창원대학교
전자공학과(공학박사) 2012년 3월~현재 : 부산대학교
부교수
관심 분야 : 수중드론, 조선해양 ICT융합, 전기추진선박
김 진 우 (Jin-Woo Kim)
2001년 8월 : 부산대학교 무역학과(경제학사)
2017년 2월 : ㈜리트비즈(개발팀장) 2019년 3월 : ㈜록스(ICT연구소장) 2019년 4월~현재 : 부산대학교
선박해양플랜트기술연구원(책임연구원) 관심 분야 : 조선해양 ICT융합, 빅데이터, 실시간 서비스 애플리케이션
김 구 (Goo Kim)
2001년 8월 : 부산대학교 컴퓨터공학과(공학석사) 2017년 6월 : 부산대학교
사물인터넷연구센터(연구교수) 2018년 11월~현재 : 부산대학교
선박해양플랜트기술연구원 (산학협력초빙교수)
관심 분야 : 조선해양 ICT융합, 빅데이터, 증강/공존현실
신 현 실 (Hyun-Shil Shin)
2005년 2월 : 동서대학교 컴퓨터네트워크학과(공학석사) 2008년 2월 : 동서대학교
유비쿼터스IT학과(박사수료) 2017년 8월~현재 : 브이앤알 대표 관심 분야 : 가상현실(AR/VR), IoT
무선 솔루션 기술