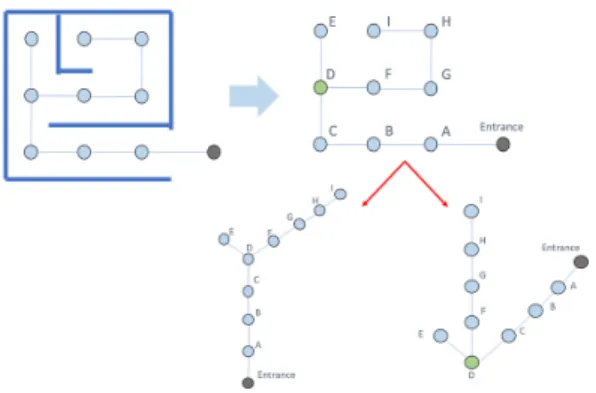
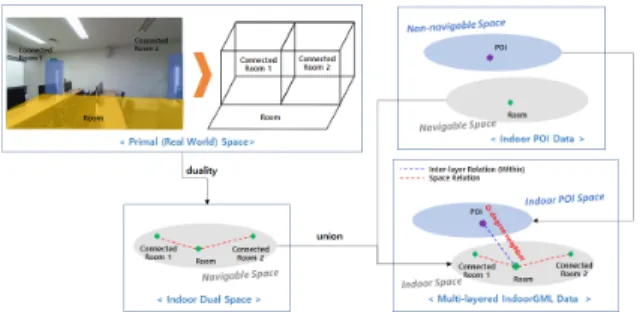
Determining Spatial Neighborhoods in Indoor Space using Integrated IndoorGML and IndoorPOI data
10
0
0
전체 글
(2)
(3)
(4)
(5)
(6)
(7)
(8)
(9)
(10)
수치
+2
관련 문서
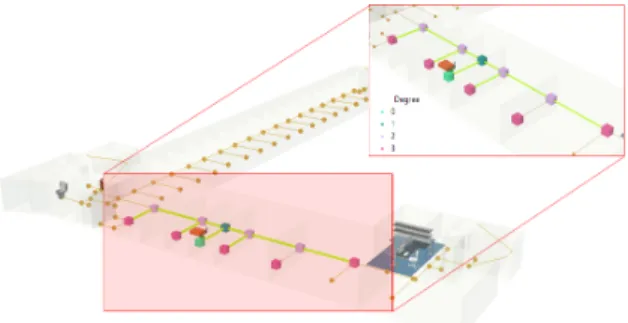
The implemented route guidance system follows the Indoor Geography Markup Language (IndoorGML), which is the indoor spatial information standard, and provides
Data standards and metadata in spatial database systems. 5.1 Issues with implementing standards and metadata in
For the system development, data collection using Compact Nuclear Simulator, data pre-processing, integrated abnormal diagnosis algorithm, and explanation
Pooling Cross-section and Time Series Data in the Estimation of a Dynamic Model: The Demand for Natural Gas. Econometric Analysis of Panel Data, second
Data quality is essential for Analytical CRM, where strategies are developed based on the results of data analysis.. Socio-economic data of customers is both easily gathered
The load command can be used for retrieving variables that were saved with the save command back to the workspace, and for importing data that was created with other
Data sampled at the scan interval is recorded in the internal memory as measured data for each specified data type (display data and event data).. Measured value at
Azure Data Factory (ADF) is a cloud-based data integration service that allows you to orchestrate and automate data movement and data transformation. Ingesting data can
