<학술논문> DOI:10.3795/KSME-A.2008.32.2.162
실시간 다물체 차량 해석을 위한 준정적법의 컴플라이언스 효과 모델링
김성수†․정완희*․하경남**
(2007년 11월 2일 접수, 2008년 1월 17일 심사완료)
Compliance Effect Modeling Based on Quasi-Static Analysis for Real-Time Multibody Vehicle Dynamics
Sung-Soo Kim, Wan Hee Jeong and Kyoungnam Ha
Key Words: Compliance Effect(컴플라이언스 효과), Quasi-Static Analysis Method(준정적법) HILS (Hardware-in-the Loop Simulation), Subsystem Synthesis Method(부분시스템 합성법)
Abstract
Compliance effect consideration method for real-time multibody vehicle dynamics is proposed using quasi-static analysis. The multibody vehicle model without bush elements is used based on the subsystem synthesis method which provides real-time computation on the multibody vehicle model.
Reaction forces are computed in the suspension subsystem. According to deformation from the quasi-static analysis using reaction forces and bush stiffness, suspension hardpoint locations and suspension linkage orientation are changed. To validate the proposed method, quarter car simulations of McPherson strut and multilink suspension subsystems are performed. Full car bump run simulations and fish hook handling test simulations are also carried out comparing with the ADAMS vehicle model with bush elements. CPU times are also measured to see the real-time capabilities of the proposed method.
1. 서 론
실시간 차량 동역학 모델은 HILS(Hardware- in-the loop simulation)이나 차량 시뮬레이터에 반 드시 필요한 요소이다. 실시간 해석을 이루기 위 해서, 상용 HILS 시스템에서는 차량의 복잡한 현 가 모델링을 단순한 질량과 스프링의 모델과 실 험적인 현가 특성 데이터를 이용하는 방법이 주 로 사용되고 있다.(1)
†책임저자, 회원, 충남대학교 BK 21 메카트로닉스 그룹 E-mail : [email protected]
TEL : (042)821-6872 FAX : (042)821-4919 * 충남대학교 대학원 BK 21 메카트로닉스 그룹
** 충남대학교 대학원 BK 21 메카트로닉스 그룹
그러나 이러한 모델은 실험적으로 측정한 기구정 역학적 데이터가 있어야 하므로, 다양한 시뮬레 이션 환경에 적용하는 데는 제한적이다. 이와는 대조적으로 다물체 동역학 차량모델은 차량을 구성하는 현가장치, 조향장치, 부싱 요소 등 각 구성요소를 그대로 반영한 가상 차량모델을 사용 하기 때문에 보다 정확한 차량의 거동 해석이 가 능하다. 그러나 차량을 구성하고 있는 각각의 현 가 링크의 운동을 반영하고 링크간의 구속조건들 을 고려해야 하므로, 미분-대수 방정식 형태의 복 잡하고 변수의 개수가 많은 운동방정식을 다루어 야 한다. 또한 이러한 복잡한 운동방정식은 연산 시간이 길어지는 단점이 있다. 이러한 어려움을 극복하기 위해서, 현가 장치 부분시스템의 운동 방정식과 차체의 운동방정식을 분리해서 처리하 는 부분시스템 합성에 의한 효율적인 실시간 차
량 동역학 기법이 개발 되었다.(2)
또한, 부싱요소에 의한 컴플라이언스 효과는 차량의 거동에 큰 영향을 미치기 때문에 실시간 모델의 신뢰성 향상을 위해서는 반드시 고려되어 야 하는 부분이다. 일반적인 다물체 동역학 모 델의 경우 부싱요소는 높은 강성을 갖는 스프링 으로 모델링하는데, 그에 따른 고주파 특성으로 인하여 수치적분 시 세밀한 적분간격을 필요로 하게 되어 실시간 해석이 어려워진다.
이러한 문제점을 보완하기 위하여 이종호와 김 상섭은 준정적 방법을 통한 부싱의 컴플라이언스 효과를 고려하는 방법을 제안하였다.(3) 그러나 이 방법은 현가장치의 기구요소들을 무 질량 링크로 간주하였기 때문에 현가 링크의 길이방향 컴플라 이언스 효과만이 고려되는 한계를 가진다.
본 논문에서는 부분시스템 합성방법에 의한 다물체 차량모델에 준정적 방법을 이용하여 컴플 라이언스 효과를 고려하는 방법을 제안하였다.
본 논문에서 제안한 방법은 무 질량 링크 방법과 는 달리 현가기구의 질량 및 관성모멘트, 그리고 조인트가 그대로 모델링되기 때문에 조인트 반력 과 반력토크에 의한 부싱의 병진방향의 변형뿐만 아니라 비틀림 변형을 고려할 수 있다. 본 논문 에서는 준정적 방법을 이용한 부싱위치의 하드 포인트 변경 알고리즘을 제안하고, 맥퍼슨 스트 럿 현가장치와 멀티링크 현가장치에 적용 후 ADAMS 컴플라이언스 모델과의 시뮬레이션 결과 비교를 통하여 제안된 방법에 의한 컴플라이언스 효과를 평가하였다. 또한 계산시간 측정을 통하 여 실시간 시뮬레이션 가능성을 확인하였다.
2. 부분시스템 합성방법을 이용한 차량 모델링
Fig. 1은 맥퍼슨 스트럿과 멀티링크 현가장치의 차량 모델의 부분 시스템 해석을 위한 위상분석 도이다. 부분 시스템 합성법을 적용하여 차량을 해석하는 경우 먼저 4개의 독립적인 부분 시스템 이 차체에 미치는 효과를 효과 관성 행렬 M(i
(i=1~4)과 효과 힘 벡터 P(i(i=1~4)를 통하여 구하 고, 그 효과를 차체의 운동방정식에 합성하여 6 자유도의 차체만의 운동방정식을 식 (1)과 같이 구한다.2)
Fig. 1 Topology of 4 subsystem
4 4
0 0 0
1 1
( i) ( i)
i= i=
+∑ = +∑
M) M Y( )& Q) P(
(1) 식 (1)을 이용하여 차체 가속도의 상태 벡터인
) ˆ (
0 t
Y& 를 구하면 각각의 현가 부분 시스템에 대하 여 식 (2)와 같은 독립적인 운동방정식을 얻을 수 있다.
0( )
T T
qq q yq
⎡ ⎤⎡ ⎤ ⎡ ⎤ ⎡ ⎤ t
= −
⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
⎣ ⎦
q q
M Φ q P M
Φ 0 λ γ 0 Y
&& )&
(2) 식 (2)의 현가부분 시스템의 운동방정식은 미분 대수 방정식으로 여러 가지 방법으로 그 해를 구 할 수 있다. 그 중 한 가지 방법인 일반 좌표 분할법은 현가 부분 시스템에 사용된 좌표 q를 독립좌표(independent coordinate) v와 종속좌표 (dependent coordinate) u로 분할하고 운동방정식 을 독립 좌표의 함수로 변환하여 해를 구하는 방 법이다.(4)
현가 부분시스템의 운동방정식은 먼저 식 (2)의 운동방정식을 독립좌표와 종속좌표에 의해서 아 래의 식 (3)과 같이 나누고, 대수적인 조작에 의 해서, 독립변수에 관한 운동방정식으로 식 (4)과 같이 변환 한다.
) ˆ (
0 t
v T yq
u T yq v
u T
vv vu
T uv uu
Y 0 M M
γ P P
λ v u
0 Φ Φ
Φ M M
Φ M M
v u
v
u && &
&&
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢
⎣
⎡
−
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢
⎣
⎡
=
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢
⎣
⎡
⎥⎥
⎥
⎦
⎤
⎢⎢
⎢
⎣
⎡
(3)
0
*
*
*v Q Q Yˆ
M &&= q− y& (4)
여기서,
* 1 1
1 1
( ) ( )
( ) ( )
T T
vv vu vu
T uu
− −
− −
= − −
+
u v u v
u v u v
M M M Φ Φ Φ Φ M
Φ Φ M Φ Φ (5)
* 1
1 1
( )
[ ( ) ]( )
T
q v u
T
vu u u
−
− −
= −
− −
u v
u v u
Q P Φ Φ P
M Φ Φ M Φ γ (6)
T yqv yqu
y ( 1 )
*
v
uΦ
Φ M M
Q = − − (7) 이다. 종속좌표에 대한 가속도와 라그랑지 승수 는 식 (8)의 가속도 구속 방정식과 식 (9)에 의해 구한다.
1 1
− −
= u − u v
u Φ γ Φ Φ v
&& && (8) )
( )
(Φ1 P M u M v
λ = u− T u− uu&&− uv&& (9) 또한 식 (1)에서 필요로 하는 각 부분 시스템 별로 차체에 미치는 효과 관성 행렬과 효과 힘 벡터는 식 (10)과 식 (11)로 구한다.(2)
* 1
*
*yT( ) y
yy
c M Q M Q
M( = − −
(10)
* 1
*
*
1 ) ( )
( yT q
yqu y
c P M Φ γ Q M Q
P( = − u− − −
(11)
3. 준정적법을 이용한 컴플라이언스 효과 모델링
본 논문에서는 부싱의 컴플라이언스 효과를 고 려하면서 실시간 해석이 가능하도록 하기 위하여 부싱요소를 일반적인 조인트로 대체하여 운동방 정식을 풀고, 계산된 조인트 반력 및 토크와 부 싱의 강성을 이용하여 준정적법에 의한 부싱의 변형을 계산한 후 그 변형 량으로 부싱위치의 하 드 포인트를 변경하여 부싱요소의 컴플라이언스 효과를 고려하는 방법을 제안하였다.
3.1 단순 모델을 통한 타당성 검증
준정적 방법을 현가장치의 다물체 동역학 모델 에 직접 적용하기에 앞서, 단순스프링댐퍼 모델 을 이용하여 부싱의 고주파 특성이 적분간격에 미치는 영향과 준정적 방법에 의한 부싱 연결부 위 모델링의 타당성 여부를 검증을 수행하였다.
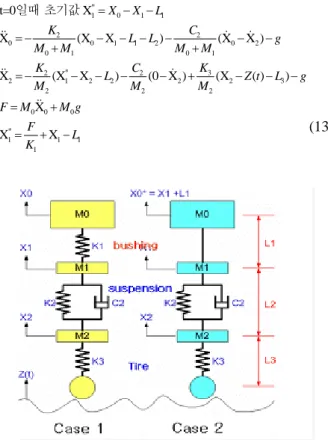
Fig. 2 은 SUV(Sports Utility Vehicle)의 맥퍼슨 현 가장치를 스프링 댐퍼로 연결된 단순모델로 나타 낸 것이다. M0, M1, M2는 각각 차체, 부싱, 현가 장치의 질량을 나타내고, K1는 부싱의 강성을, K2
및 C2는 현가장치의 스프링 강성과 댐핑 계수를, K3은 타이어의 강성을 의미한다. 또한 X0, X1, X3
는 차체, 바퀴, 부싱 각각의 변위를 나타낸다.
Case 1에서는 K1에 해당하는 부싱의 강성을 그대 로 고려한 모델이고, Case 2는 부싱과 차체가 고 정되어 있는 것으로 생각하고 부싱과 차체 사이 의 조인트 반력에 의한 L1의 길이 변화를 정적인 해석에 의하여 계산하는 준정적 방법을 적용한 모델이다.
Case 1 모델의 운동방정식은 다음과 같이 유도 된다.
1
0 0 1 1
0
2 2 1
1 1 2 2 1 2 0 1 1
1 1 1
3
2 2
2 1 2 2 1 2 2 3
2 2 2
X (X X )
X (X X ) (X X ) (X X )
X (X X ) (X X ) (X ( ) )
K L g
M
K C K
L L g
M M M
K
K C
L Z t L g
M M M
=− − − −
=− − − − − + − − −
=− − − − − + − − −
&&
&& & &
&& & & (12)
Case 2 모델의 운동방정식은 다음과 같이 유도 된다. 매 적분 간격에서의 계산된 부싱 연결부위 의 반력에 의한 차체 하드 포인트의 상대변위를 계산하여 운동방정식 계산에 사용한다.
*
1 0 1 1
2 2
0 0 1 1 2 0 2
0 1 0 1
* 3
2 2
2 1 2 2 2 2 3
2 2 2
0 0 0
*
1 1 1
1
t=0 X
X (X X ) (X X )
X (X X ) (0 X ) (X ( ) )
X
X X
X X L
K C
L L g
M M M M
K
K C
L Z t L g
M M M
F M M g
F L
K
= − −
= − − − − − − −
+ +
= − − − − − + − − −
= +
= + −
&& & &
&& &
&&
일때 초기값
(13)
Fig. 2 simple suspension feasibility test
0 1 2 3 4 5 0.8
1
X0
position(m)
0 1 2 3 4 5
-1 - 0.5 0 0.5
X0 dot
velocity(m/s)
0 1 2 3 4 5
-10 0 10
X0 ddot
acceleration(m/s2)
0 1 2 3 4 5
0.8 1
X1 vs X1 star
position(m)
0 1 2 3 4 5
0 0.5 1
X2
position(m)
0 1 2 3 4 5
- 1 0 1
X2 dot
velocity(m/s)
0 1 2 3 4 5
- 50 0 50
X2 ddot
acceleration(m/s2)
0 1 2 3 4 5
0 0.1 0.2
Z(t)
position(m)
case 1 case 2
Fig. 3 case 1 vs case 2 bump run simulation result
0 2 4 6
0.8 1
X0
position(m)
0 2 4 6
-1 0 1
X0 dot
velocity(m/s)
0 2 4 6
-10 0 10
X0 ddot
acceleration(m/s2)
0 2 4 6
0.8 0.9 1
X1 star
position(m)
0 2 4 6
0 0.5 1
X2
position(m)
0 2 4 6
-0.5 0 0.5
X2 dot
velocity(m/s)
0 2 4 6
-50 0 50
X2 ddot
acceleration(m/s2)
0 2 4 6
0 0.1 0.2
Z(t)
position(m)
1ms 0.1ms
Fig. 4 case 2 bump run simulation result (1ms vs 0.1ms)
Fig. 3은 Case 1 모델과 Case 2 모델의 범프 통 과 시뮬레이션 결과를 보여주고 있다. Case 1 모 델의 경우 실시간 조건인 1ms 적분 간격에서 적 분이 불가능하여 0.1ms로 적분간격을 조정하여야 시뮬레이션이 가능하였다. 시뮬레이션 조건으로 는 2초부터 sin(t)의 반사인 범프를 통과하는 동안 차체 및 바퀴의 변위, 속도, 가속도를 비교하였 다. 실선이 Case 1 모델의 시뮬레이션 결과이고 점선이 준정적 방법을 이용한 Case 2 모델의 결 과를 나타낸다. 준정적 법을 사용한 Case 2 모델 의 시뮬레이션 결과가 Case 1 모델의 결과를 비 교적 잘 추종하고 있음을 확인할 수 있다. 따라 서 본 논문에서 제안한 준정적 법에 의한 컴플라 이언스 효과의 반영의 타당성을 간접적으로 입증 하였다.
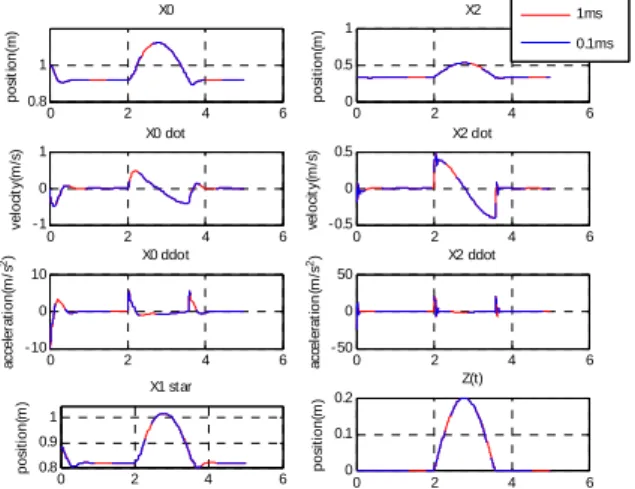
준정적 방법을 사용한 case 2 모델의 실시간 조건 적분간격에서의 적분 가능성 유무를 확인하 기 위하여 case 2 모델을 1ms와 0.1ms의 서로 다 른 적분간격에서 시뮬레이션을 수행하였다. Fig.
4는 시뮬레이션 결과를 나타낸다. 붉은 선은 1ms 적분 간격을, 푸른 선은 0.1ms 적분간격을 나타낸 다. 시뮬레이션 결과, 두 적분간격 모두 동일한 결과를 나타내고 있다. 따라서 준정적 방법을 사 용할 경우 시뮬레이션 결과의 정확성은 해치지 않으면서 1ms 의 실시간 조건 적분 간격을 사용 할 수 있음이 확인되었다.
3.2 다물체 현가 모델의 컴플라이언스 효과 3.2.1 조인트 반력 계산
동역학 해석 시 모든 조인트의 반력을 구할 필 요 없이 특별히 관심 있는 물체의 동하중 이력 (dynamic load history)를 구하기 위해서는 그 물체 와 연결된 조인트의 반력만을 필요로 한다. 김성 수, 유진영 은 조인트 반력 계산 시 역순환적인 계산을 배제하고 선택된 조인트의 반력을 구할 수 있는 방법을 제시하였다.(5)
i 번째 조인트에 작용하는 반력은 다음과 같이 정의 된다.(5)
ˆi,i-1 i iˆi ∑n l l l
l=i+1
R = -L + K Y +& K B q&&
(14) 식 (14)의 오른 편 항들인 Li, Ki, Bi등은 각
각 상태 힘 벡터, 상태 관성행렬, 속도변환 행렬 등을 나타내며, 2장의 운동방정식을 형성할 때 모두 계산된다. 상태 가속도와 조인트 좌표의 가 속도는 운동방정식으로부터 계산된다. 따라서 i 번째 조인트의 반력은 시스템의 운동방정식으로 부터 가속도를 구한 후 계산된 항들로 직접 구할 수 있다.
식 (14)의 상태 벡터로 나타낸 조인트 반력을 직교좌표의 반력과 모멘트 형태로 표현하면 식 (15)과 같이 나타난다.
⎡ ⎤ ⎡ ⎤ ˆ
⎢ ⎥ ⎢ ⎥
⎣ ⎦
⎣ ⎦
i,i-1
i,i-1
i,i-1 i
f I 0
= R
n -r% I (15)
여기서 ri 과 fi,i-1, ni,i-1은 아래 Fig. 5에서와
같이 조인트 위치를 나타내는 위치 벡터와 조인
n뮃i-1,i Z뮃i-1 ,i
Y뮃i-1 ,i
X뮃i-1 ,i
f뮃i-1 ,i ri
Z Y
X n’i+1 ,i
Z’i+1 Y’i+1
X’i+ 1 f’i+1 ,i
Z’i Y’i
X’i O’i
O’’i,i+1 n뮃i,i+ 1 Z뮃i,i+ 1
Y뮃i,i+1
X뮃i,i+1 f뮃i,i+1 Zci
Yci Xci f'i,i-1 n’i,i-1
bo dy i - 1
bo dy i
bo dy i+1 C .G .
Fig. 5 A free body diagram of multibody system
Fig. 6 ADAMS bushing model characteristics
트 반력과 조인트 반력토크를 나타낸다.
3.2.2 부싱 특성을 고려한 하드 포인트 변경 본 논문에서 수행하는 차량 모델링의 기준모델 은 ADAMS 모델로 부싱 모델링 또한 ADAMS의 그것을 따르고 있다. Fig. 6은 ADAMS에서 사용 하는 부싱 모델의 좌표계 및 강성을 나타내고 있 다. Fig. 6에 나타난 바와 같이 ADAMS 부싱 모 델은 원통형의 형상을 가지고 있고 반지름 방향 인 x축과 y축의 강성이 서로 같다. 따라서 다음 과 같이 나타낼 수 있다.
x y radial
z Axis
K K K K K
= =
= (16)
이 때문에 하드 포인트 변경 계산 시 x축 및 y 축에 대한 조인트 반력을 직접 사용할 수 없고 합력을 구해서 반지름 방향의 강성을 적용해야 정확한 하드 포인트 변경 계산이 가능하다. 식 (14), (15)로부터 얻은 조인트 반력과 부싱 특성으 로부터 하드 포인트를 변경하는 과정은 다음과 같다.
Step 1) 3.2절로부터 얻은 조인트 반력은 관성 좌표계에 대한 힘이므로, 부싱 좌표계 상에 작용 하는 힘으로 변환한다.
"
"
T
i-1,i i-1 i-1,i i,i-1
' T
i-1,i i-1 i-1,i i,i-1
f = (A C ) (-f )
n = (A C ) (-n ) (17)
Step 2) fi-1,i" 의 x축 및 y축 성분의 합력을 구하
여 fradial의 형태로 변환한다. 또한 z축 성분으로
fAxis를 계산한다.
"
"
[( ) ( ) 0]
[0 0 ( ) ]
T
x y
T z
=
=
" "
radial i-1,i i-1,i
"
Axis i-1,i
f f f
f f (18)
Step 3) 부싱 강성으로부터 부싱의 반지름 방향 과 축 방향의 변형 량을 계산한다.
"
"
/ / / /
x
y
radial radial radial
Axis Axis Axis
x
y y
f K
f K
K K
θ θ
δ δ θ θ
=
=
=
=
"
i-1,i x
"
i-1,i
(n )
(n ) (19)
Step 4) δradial로부터 부싱 좌표계에 대한 δ δx, y
을, δaxis로부터 δz을 계산하여 δi =[δ δ δx y z]T 을 생성하고,θ θx, y 로부터 비틀림에 의한 자세 변환행렬 Δ−1
C i ,i을 오일러 각 정의를 이용하여 계산한다.
'
_ "
'
_ "
_ _
[ ]
[ ]
x radial x radial
y radial y radial
T radial x radial y Axis
T
x y z
f
f
δ δ
δ δ
δ δ δ
δ δ δ
⎛ ⎞
⎜ ⎟
= ⋅
⎜ ⎟
⎝ ⎠
⎛ ⎞
⎜ ⎟
= ⋅⎜⎝ ⎟⎠
=
=
radial
radial i
f
f
δ (20)
1
1 0 0 cos 0 sin
0 cos sin 0 1 0
0 sin cos sin 0 cos
y y
x x
x x y y
θ θ
θ θ
θ θ θ θ
−
⎡ ⎤
⎡ ⎤
⎢ ⎥
⎢ ⎥
=⎢ − ⎥⎢ ⎥
⎢ ⎥
⎢ ⎥ −
⎣ ⎦ ⎣ ⎦
Δ
Ci ,i
(21)
S tart
R ead Input
sus pens ion ( FR ) suspension
(R L)
suspens ion (R R)
suspens ion (FL )
C hassis acc eleration
Acc eleration (R L)
A cc eleration (R R)
A cc eleration (FL )
Acc eleration (FR )
C om pute joint reac tion forc e
U pdate H ard point N umerical
integrator
ˆi , i
Y& q&&
i i
i i
K , L B , D
1 1 1
− − ⋅ −
* '
i,i +1 i,i+ 1 i
* Δ
i,i i,i i,i
s = s + δ
C = C C
ˆi, i-1 i iˆi ∑n l ll
l= i+1
R = -L + K Y +& K B q&&
* i,i+1
s
* i,i +1
C
t +Δt Y
Fig. 7 Data flow diagram of hard point changing process
Fig. 8 McPherson strut suspension
Step 5) step 4에서 구한 변형 량을 이용하여 다음 단계에서 사용할 하드 포인트 및 자세 행렬 을 갱신한다. 이때, 계산된 δi은 부싱 좌표계에 서 정의된 변형 량이므로 차체 샤시 좌표계에 대 한 변형 량으로의 좌표변환과정을 통하여 아래와 같이 위치와 자세를 변화시킨다.
1
1 1 1
T
−
− − −
⋅
⋅
* '
i,i+1 i,i+1 i ,i i
* Δ
i ,i i ,i i ,i
s = s + C δ
C = C C (22)
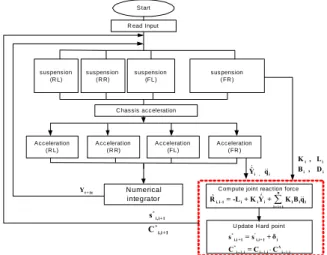
Fig. 7은 하드 포인트 갱신 알고리즘이 적용된 차량 모델의 계산 과정을 나타낸 것이다. 본 논 문에서 제안한 방법은 기존의 차량동역학 모델의 운동방정식에서 계산된 항들을 이용하기 때문에 Fig. 7의 점선 상자로 나타낸 것과 같이 부가적인 모듈형태로 추가가 가능하고, 추후 알고리즘의 변경에도 유리하다.
Fig. 9 Multi-link suspension
4. 차량 모델링 및 시뮬레이션
4.1 차량 현가장치 모델링
SUV의 전륜 현가장치로 사용되는 맥퍼슨 스트 럿 현가장치는 Fig. 8과 같이 스트럿(strut), LCA(Lower Control Arm), 너클(Knuckle)로 구성되 어 있다. 스트럿과 LCA는 차체에 부싱으로 연결 되어 있다. 준정적 방법을 사용할 때에는 스트럿 과 차체를 연결하는 부싱이 구면 조인트로 대체 되고, LCA와 차체를 연결하는 두 개의 부싱은 한 개의 회전 조인트로 대체된다.
SUV의 후륜 현가장치로 사용되는 멀티링크 현가장 치는 Fig. 9와 같이 UCA(Upper Control Arm), LCA(Lower Control Arm), 서스펜션 암(suspension arm) 으로 구성되어 있다. UCA와 LCA, 그리고 서스펜션 암은 차체에 부싱으로 연결되어 있다. 준정적 방법을 적용할 때에는 UCA 및 LCA와 차체를 연결하는 부싱 이 유니버설 조인트로 대체되고, 서스펜션 암과 차체 를 연결하는 부싱은 구면 조인트로 대체된다.
4.2 1/4 차량 현가 시뮬레이션
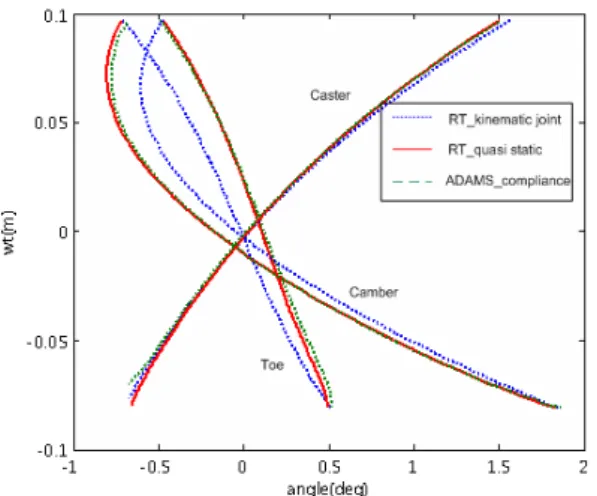
준정적 법을 통한 컴플라이언스 효과를 확인하 기 위하여 1/4차량 모델의 바퀴 중심에 -0.1m ~ 0.1m의 수직 방향 운동을 부여하는 휠(Wheel) 궤 적 시뮬레이션을 수행하여 ADAMS 모델과 부싱 을 고려하지 않고 기구학적인 특성만 고려한 다 물체 차량 모델, 제안된 방법을 사용한 모델의 토우, 캠버, 캐스터 각을 비교하였다. Fig. 10과 Fig. 11은 세 모델에서의 시뮬레이션 결과를 나타 내고 있다. ADAMS 모델과 기구학적 특성만을 고려한 다물체 차량 모델은 큰 차이를 보이고 있 으나 제안된 방법을 사용한 모델의 경우 ADAMS
Fig. 10 1/4 car wheel travel simulation result (McPherson)
Fig. 11 1/4 car wheel travel simulation result (multilink)
Fig. 12 Full car simulation result (chassis body vertical motion)
모델에 보다 근접한 결과를 보여주고 있다.
4.3 전 차량 모델 시뮬레이션 결과 비교
준정적 법에 의한 컴플라이언스 효과가 전차량 모델에서 적용가능한지를 확인하기 위하여 범프
Fig. 13 X-Y trajectory of chassis body
Fig. 14 Roll angle of chassis body
통과 시뮬레이션과 Fish-hook 시뮬레이션을 수행 하였다.
조향 운동은 랙(rack)의 변위에 따른 기구학적 인 드라이버로 고려하였으며, 타이어 모델은 자 체 개발한 Pacejka 타이어 모델을 사용하였다.
Fig. 12는 기구학적인 다물체 모델과 준정적 방법 을 사용한 실시간 모델, 그리고 ADAMS 컴플라 이언스 모델의 시뮬레이션 결과 비교를 나타내고 있다. 차체 무게중심의 수직방향 변위에서, 기존 부분시스템 합성방법을 이용한 기구학적 모델과 비교하여 준정적방법의 부싱 컴플라이언스 효과 를 고려한 실시간 모델이 ADAMS 컴플라이언스 모델에 더 근접함을 알 수 있다.
Fig. 13과 Fig. 14는 Fish-hook 시뮬레이션 결 과를 나타낸다. 컴플라이언스 모델의 경우 선회 하는 차량의 타이어에 횡 방향 힘이 발생할 때 맥퍼슨 스트럿 현가장치의 LCA의 앞뒤에 연결된 서로 다른 강성을 가진 부싱의 변형에 의한 현가 장치의 토우 변화에 따라 타이어 슬립 각이 커지 기 때문에 Fig. 13과 같이 상대적인 언더스티어 경향이 일어나게 된다. 사용된 타이어 모델의 수 직방향 힘을 제외한 횡 방향 힘과 복원 모멘트 등의 특성차이로 인하여 ADAMS 모델과의 응답 에서 차이가 나타나고 있지만 전반적인 경향에 있어서 컴플라이언스 효과 발생에 따른 차체 거 동에의 영향은 고려되고 있음을 확인 할 수 있 다.
Table 1 CPU time comparison
Method
Total CPU Time (sec)
Average time(sec/stCPU
ep size)
Total CPU time
to Real time (%)
Ratio
kinematics 1.562 0.00019 19.5 1 compliance 1.624 0.00020 20.3 1.041
5. 실시간 검증
제안된 방법에 의한 차량 모델의 실시간 달성 여부를 검증하기 위하여 fish-hook 시뮬레이션 동 안의 CPU 계산 시간을 측정하였다.
계산시간 측정에는 Intel core2duo e6300 CPU (1.86GHz), 2GB DDR RAM의 사양을 가진 PC를 사용하였다.
Table 1은 기구학적 조인트만을 고려한 다물체 모델과 제안된 방법에 의한 전 차량 모델의 CPU 계산 시간을 나타내고 있다. 기존 모델에 비하여 계산시간이 크게 증가하고 있지 않음을 확인할 수 있다.
6. 결 론
본 연구를 통하여 부분시스템 합성방법에 기반 을 둔 다 물체 차량 모델의 준정적 방법을 통한 컴플라이언스효과 적용방법을 제안하였다.
이상의 연구를 통하여 얻은 결론은 다음과 같 다.
(1) 현가장치 1/4차량의 wheel travel 시뮬레이션 및 전 차량 범프 통과 및 주행 시뮬레이션을 통 하여 기준 모델인 ADAMS 컴플라이언스 모델에 기구학적 모델보다 근접한 결과로 제안된 방법의 타당성을 입증하였다.
(2) 기존 부분시스템 합성방법에 의한 실제 시 간 대비 19.5%의 계산시간을 소요하는 기구적 차 량 모델에 비하여 약 4%의 계산 증가로 실시간 시뮬레이션이 가능함을 확인하였다.
(3) 추후 타이어 모델 보완과 조향 컴플라이언 스를 포함한 전 차량 모델의 주행 시뮬레이션을 통한 검증이 필요하다.
후 기
본 연구는 자동차부품연구원 (KATECH) 주관 미래형자동차 연구과제 (No. 10016789-2006-13) 에 의해서 수행되었음.
참고문헌
(1) Mechanical Simulation Corporation, 2005, CarSim User Manual.
(2) Kim, S.-S., 2002, "A Subsystem Synthesis Method for Efficient Vehicle Multibody Dynamics,"
Multibody System Dynamics, Vol. 7, pp. 189 ~207.
(3) Lee, J. H., 1998, “An Efficient Vehicle Dynamics Analysis Method Including Kinematic and Compliance Characteristics of Suspensions," Master’s Thesis, Kook Min Univ.
(4) Wehage, R. A. and Haug, E. J., 1982,
“Generalized Coordinate Partitioning for Dimension Reduction in Analysis of Constrained Dynamic Systems,” ASME Advanced Automotive Technologies, DSC Vol. 52, pp. 71 ~79.
(5) Kim, S.-S. and You, J. Y., 2003, “An Efficient Constraint Force Computation in Multibody Systems," JSME International Journal. Series C, Mechanical Systems, Machine Elements and Manufacturing, Vol. 46 No. 2. pp. 476 ~482.