Vol.8, No.2, pp.7-13 (2014)
비대칭 이중화 EHA의 유압 회로 설계
홍예선
1,†· 김상석
2· 김대현
2· 김상범
2· 박상준
2· 최관호
31한국항공대학교 항공우주 및 기계공학부
2한화테크엠(주) 항공우주연구소
3국방과학연구소
Design of a Hydraulic Circuit for an Asymmetrically Dualized Electro-Hydrostatic Actuator
Yeh-Sun Hong
1,†, Sang-Seok Kim
2, Dae-Hyun Kim
2, Sang-Beom Kim
2, Sang-Joon Park
2and Kwan-Ho Choi
31
Dept. of Aerospace Engineering, Sejong University,
2
Hanhwa TechM Aerospace R&D Center
3
Agency for Defense Development
Abstract : In order to enable fail-safe operation the electro-hydrostatic actuators can be dualized. When a
symmetrical actuator is combined in series with an asymmetrical actuator with single rod cylinder, the flow rates of their cylinders are unmatched. If their position controller has same configuration, one of their pumps can supply too much flow rate under particular load conditions, which should be bypassed into low pressure side e.g. by a relief valve. In this paper it is shown how the hydraulic circuit for the asymmetrically combined electro-hydrostatic actuator can be designed without sacrificing power consumption.Key Words : Electro-Hydrostatic Actuator, Dual Actuator, Asymmetrical Cylinder, Symmetrical Cylinder
Received : Feb. 12, 2014 Revised : June 11, 2014 Accepted : June 20, 2014
† Corresponding Author
Tel: +82-02-300-0287, E-mail: [email protected] Copyright Ⓒ The Society for Aerospace System
1. 서 론
속도제어 고정용적 유압펌프와 유압실린더로 구성되 는 EHA(electro- hydrostatic actuator)는 기본적으 로 양방향 로드형(double rod type) 유압 실린더를 사 용해야 전진 및 후진시의 제어 특성이 동일한 대칭성 을 나타낸다[1,2]. 실린더가 차지하는 공간을 줄이기 위해 한쪽에만 로드가 있는 피스톤을 사용하는 경우에
는 전진할 때와 후진할 때에 실린더로 유입, 유출되는
유량이 다르므로 양방향 로드형 실린더를 사용하는 경
우와 다른 유압 회로가 요구된다[2]. 항공 분야에서
안전성을 높이기 위해 두 개의 EHA를 결합한 이중화
시스템을 구성할 때에 각각 양방향 로드형 실린더로
구성된 EHA들을 조합하는 경우에는 단일 EHA를 구
성할 때의 유압회로를 그대로 적용하여도 두 EHA 간
에 간섭 문제가 발생하지 않는다. 그러나 양방향 로드
형 실린더를 사용하는 대칭형 EHA와 단방향 로드형
실린더를 사용하는 비대칭형 EHA를 결합시키면 서로
다른 유량과 압력 변화 특성 때문에 상대편 EHA에 대
해 영향을 주게 된다. 이러한 간섭 문제를 해결하지
않으면 유압 펌프는 비대칭형 EHA에 필요한 유량을 공급하기 위해 작동하므로 대칭형 EHA에서는 불필요 하게 많이 공급되는 유량을 릴리프 밸브로 바이패스 시켜야 하기 때문에 EHA 전체의 동력 손실이 증가하 게 된다. 따라서 개별적으로 사용되는 것을 가정하여 설계된 대칭형 EHA와 비대칭형 EHA의 유압회로는 재설계가 요구된다. 본 논문에서는 유압회로의 전산 시물레이션을 통해 두 개의 EHA를 결합시켜 이중화할 때의 문제점을 분석하고 해결 방안을 제시하였다.
2. 전산 시물레이션을 이용한 이중화 EHA의 유압 회로 분석
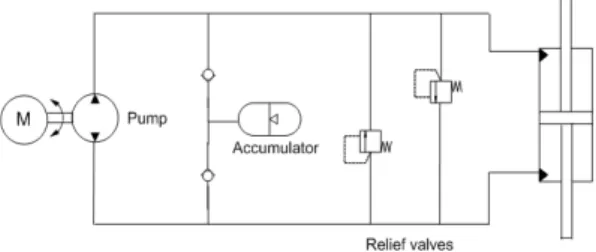
Figure 1은 대칭형 EHA와 비대칭형 EHA의 각각에 대한 일반적인 유압 회로를 보여 준다. 비대칭형 EHA 의 유압 회로에서 발생될 수 있는 문제점과 해결 방안 에 대해서는 참고문헌[3]에 상세히 설명되어 있다. 그 러나 두 개의 EHA를 결합시켰을 때의 작동 조건은 개 별적으로 작동할 때의 작동 조건과 다르므로 Fig.1(b) 의 유압회로는 수정을 전혀 하지 않은 일반적 형태이 다.
이중화 EHA 시스템의 특성을 전산 시물레이션으로 확인하기 위한 EHA의 기본 모델은 Fig. 2와 같다. 위 치제어기로는 단순하게 P 제어기를 사용하였으나, 위 치 명령의 속도 성분을 feed forward시킴으로써 모터 의 구동에 필요한 제어 신호를 발생시키면서 제어 오 차를 감소시켰다. 더 복잡한 제어기를 사용하지 않은 것은 유압 회로의 특성을 동일한 제어 입력 조건에서 비교하기 어렵게 만들기 때문이다. 그리고 본 논문에 서 제기하는 문제는 근본적으로 제어기보다 유압회로 의 개선을 통해 해결되는 것이 바람직하다.
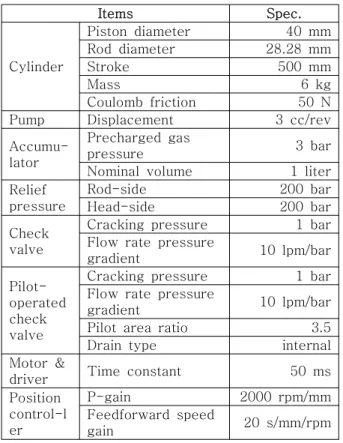
Table 1은 시물레이션 모델의 기본적인 사양을 보여 준다. 여기서 비대칭형 EHA가 대칭형 EHA와 다른 점 은 실린더 헤드 측 로드 직경이 영이고, 첵 밸브(CV로 약칭) 대신 파일롯 작동 첵 밸브(PCV로 약칭)를 사용 한다는 것이다. 그리고 비대칭 단방향 로드형 피스톤 의 헤드 측 단면적은 로드 측 단면적의 2배로 가정하 였다.
(a) EHA with double rod type cylinder
(b) EHA with single rod type cylinder
Fig. 1
Hydraulic Circuits for Electro- Hydrostatic Actuators Equipped with Either Double Rod or Single Rod CylinderFig. 2 Basic Model of Electro- Hydrostatic
Actuator with Position Feedback ControlItems Spec.
Cylinder
Piston diameter 40 mm Rod diameter 28.28 mm
Stroke 500 mm
Mass 6 kg
Coulomb friction 50 N Pump Displacement 3 cc/rev Accumu-
lator
Precharged gas
pressure 3 bar
Nominal volume 1 liter Relief
pressure
Rod-side 200 bar
Head-side 200 bar Check
valve
Cracking pressure 1 bar Flow rate pressure
gradient 10 lpm/bar Pilot-
operated check valve
Cracking pressure 1 bar Flow rate pressure
gradient 10 lpm/bar Pilot area ratio 3.5 Drain type internal Motor &
driver Time constant 50 ms Position
control-l er
P-gain 2000 rpm/mm Feedforward speed
gain 20 s/mm/rpm
Table 1 Specification of Simulation Model
두 개의 대칭형 EHA를 결합하여 이중화하는 경우 에는 기계적으로 결합된 유압실린더들에 대한 위치 명 령 신호와 피스톤의 위치 신호를 두 EHA가 공유하므 로 위치 제어기도 동일한 구조를 가져야 한다. 이러한 구조의 이중화 EHA는 개별적으로 사용될 때처럼 부하 의 작동 조건과 무관하게 정상적으로 동작을 한다.
대칭형 EHA와 비대칭형 EHA를 단순 결합하여 이중 화하는 경우에 그 시물레이션 모델은 Fig. 3과 같다.
이 경우에는 양쪽 유효 단면적 비율이 서로 다른 두 개의 피스톤이 기계적으로 결합된 상태에서 외부 부하 를 받으며 동일한 속도로 이동해야하기 때문에 펌프의 공급 유량과 실린더 압력이 서로 다를 수밖에 없다.
근본적인 문제는 동일한 위치 명령 신호와 위치 측정 신호를 사용하므로 두 EHA의 위치제어 오차도 동일한 조건에서 제어기의 구조를 서로 다르게 하더라도 비대 칭형 EHA에서 펌프가 공급하는 실린더 유량의 비대칭 성 때문에 대칭형 EHA에는 불필요하게 많은 유량이 펌프에서 공급되어 릴리프 밸브를 통해 바이패스 되는 현상이 불가피하게 발생된다는 것이다.
Fig. 3 Simulation Model of Dual Redundant
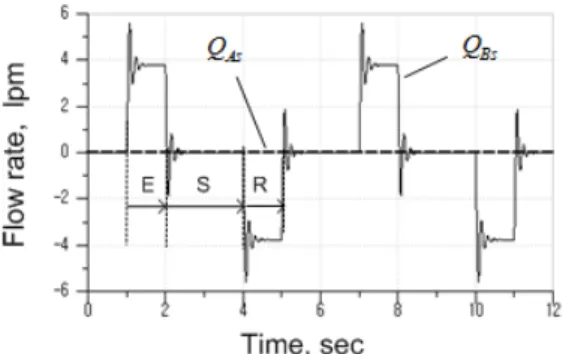
Electro-Hydrostatic Actuator System Equipped with Double Rod and Single Rod CylindersFigure 4는 EHA의 실제 작동 조건을 고려하여
ramp 파형으로 피스톤이 Fig.4(a)와 같이 전진(E), 정
지(S), 후진(R)하도록 위치 명령 신호를 입력하는 조건
에서 1,000N의 외부 부하력이 전진 방향으로 작용하
는 경우 주요 변수들의 변화를 계산한 결과이다. 여기
서 두 위치제어기의 구조는 편의상 동일하다고 가정하
였다. 외부 부하의 방향이 피스톤이 전진하는 경우에
는 overrunning load, 후진하는 경우에는 resistive
load 조건이 되지만, 어느 조건에서든 비대칭 실린더
의 헤드 측 압력(
)이 축압기 압력으로 낮아진 상태
에서 두 유압실린더의 압력이 Fig. 4(b),(c)와 같이 유
사한 패턴을 나타내며 정상적으로 작동한다. 특이한
것은 두 펌프의 회전속도가 Fig. 4(d)와 같이 대칭형
EHA에 의해 결정되는 것이다. 이때 비대칭 EHA가 전
진할 때 피스톤 헤드 측으로 공급되어야 할 유량이 로
드 측 유량의 2배이므로 Fig. 4(e)와 같이 B-포트 측
PCV를 통해 부족한 유량(
)이 축압기에서 공급되
었다가 반대로 피스톤이 후진할 때 피스톤 로드 측으
로 유입되고 남은 유량은 다시 축압기로 저장된다. 반
면에 A-포트 측 PCV는 동작을 하지 않으며(
=0),
대칭형 EHA의 첵 밸브들도 동작을 하지 않는다.
Fig. 4 Ramp Input Response of Dual Asymmetrical
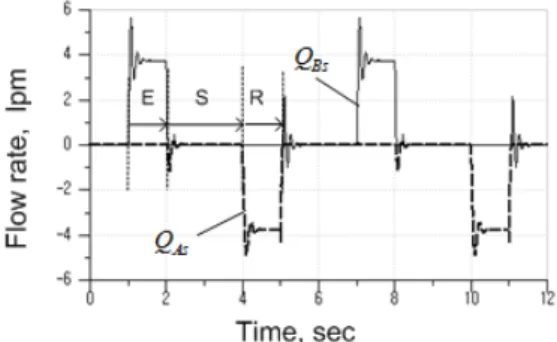
Electro-Hydrostatic Actuator System with Forwards Acting LoadFigure 5는 동일한 조건에서 외부 부하력이 후진 방 향으로 작용하는 경우의 결과이다. 이 경우에는 후진 공정에서 Fig.5(b)에서 보는 바와 같이 비대칭형 EHA 의 피스톤 헤드 측 압력(
)가 축압기 압력보다 높아 져 파일롯 첵 밸브를 닫기 때문에 두 펌프의 회전속도 가 Fig.5(c)와 같이 비대칭형 EHA에 의해 결정된다.
따라서 대칭형 EHA는 후진 공정에서 실린더가 필요로 하는 유량의 2배를 공급하게 되므로 여분의 유량은 Fig.5(d)에서와 같이 릴리프 밸브를 열고 반대 쪽 챔 버로 바이패스 될 수밖에 없다. 이로 인해 대칭형 EHA의 압력(
)이 Fig.5(a)와 같이 릴리프 압력까 지 상승하게 되었고 이것이 다시 비대칭형 EHA의 피 스톤 헤드 측 압력을 높게 만든다. 이 현상은 대칭형 EHA와 비대칭 EHA간에 불필요한 동력 손실을 유발 함과 동시에 서로 반대 방향으로 힘을 가한다는 문제 가 있으므로 유압회로의 개선이 필요하다. Fig.5(e)는 비대칭형 EHA의 전진 공정에서는 B-포트 측 PCV를 통해 축압기가 부족한 유량을 공급하고(
>0) 후진 공정에서는 A-포트 측 PCV를 통해 여분의 유량이 축 압기로 유입되는 것을 보여 준다(
<0).
한편, Fig.1(b)의 단방향 로드형 EHA는 개별적으로 사용될 경우에는 외부 부하력이 후진 방향으로 작용하 면서 피스톤이 후진하면 유압회로가 발진하였으나[2]
이중화 시스템에서는 대칭형 EHA가 피스톤의
overrunning을 방지하기 때문에 이런 현상이 나타나
지 않았다.
Fig. 5 Ramp input response of dual asymmetrical
electro-hydrostatic actuator system with backwards acting load3. 이중화된 EHA의 유압 회로 개선 결과
앞에서 보인 것과 같이 양방향 로드형 EHA와 단방 향 로드형 EHA를 결합하여 이중화시킨 유압 회로는 대칭형 EHA에서 발생되는 과다 유량 공급 문제가 해 소되도록 설계되어야 한다. Fig. 6은 이러한 목적으로 개선된 이중화 EHA의 기본 유압회로이다. 이 회로와 Fig. 3의 회로가 다른 점은 대칭형 EHA의 A-포트 측 CV를 외부 드레인 방식의 PCV로 교체하고 파일롯 압 력 라인을 비대칭형 EHA의 B 포트와 연결시킨 것이 다. 이런 수정의 목적은 후진 방향으로 부하가 작용할 경우 대칭형 EHA의 펌프가 공급하는 과다 유량을 릴 리프 밸브로 바이패스 시키는 대신 축압기로 보냄으로 써 A-포트 압력이 릴리프 압력까지 높아지는 것을 방 지하기 위함이다.
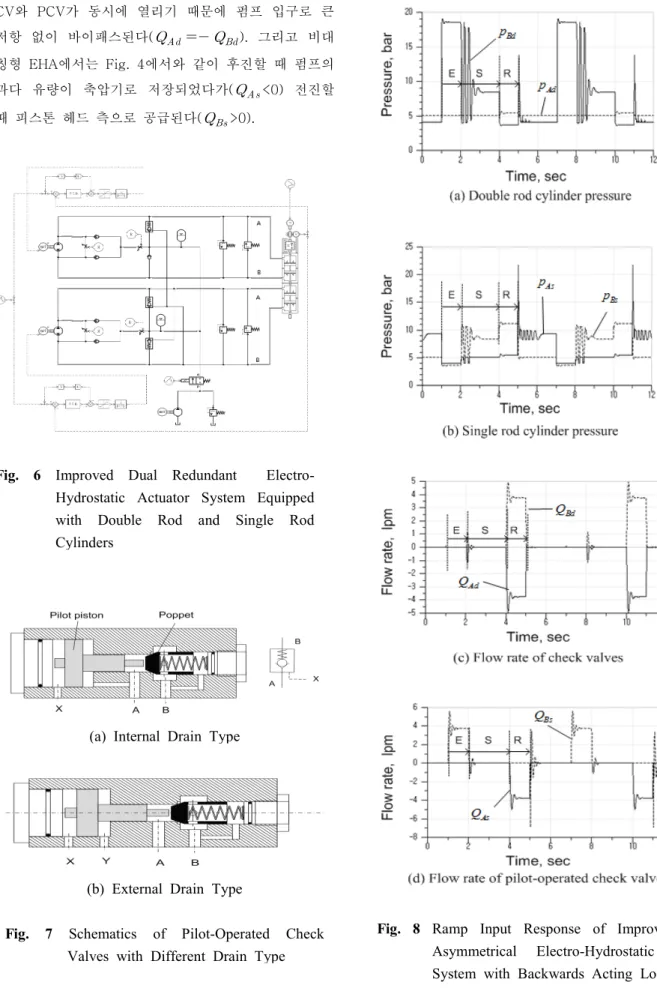
Figure 8은 후진 방향으로 부하가 작용할 경우의 시 물레이션 결과를 보여준다. 여기서 펌프 회전속도의 패턴은 Fig.5와 동일하기 때문에 비교를 생략하였다.
피스톤의 전진 후 정지할 때와 후진할 때 대칭형 EHA
에서는 B-포트의 압력(
)에 의해 PCV가 열리기 때
문에 A-포트의 압력(
)이 릴리프 압력까지 상승하
지 않게 되었다. 이로 인해 두 유압실린더의 압력은
Fig. 8(a) 및 (b)와 같이 외부 부하력과 평형을 이루는
데 필요한 만큼만 상승한다. 그리고 후진할 때 대칭형
EHA에서 펌프 출구의 과다 유량은 Fig. 8(c)와 같이
CV와 PCV가 동시에 열리기 때문에 펌프 입구로 큰 저항 없이 바이패스된다(
). 그리고 비대 칭형 EHA에서는 Fig. 4에서와 같이 후진할 때 펌프의 과다 유량이 축압기로 저장되었다가(
<0) 전진할 때 피스톤 헤드 측으로 공급된다(
>0).
Fig. 6 Improved Dual Redundant Electro-
Hydrostatic Actuator System Equipped with Double Rod and Single Rod Cylinders(a) Internal Drain Type
(b) External Drain Type
Fig. 7 Schematics of Pilot-Operated Check
Valves with Different Drain TypeFig. 8 Ramp Input Response of Improved Dual
Asymmetrical Electro-Hydrostatic Actuator System with Backwards Acting Load이상과 같이 이중화 EHA의 유압회로를 개선함으로 써 동일한 펌프 회전 속도에서도 배제 용적의 간섭에 의해 실린더 압력이 불필요하게 상승하는 것을 방지함 으로써 소비동력의 증가를 방지할 수 있다.
4. 결 론
본 논문에서는 양방향 로드형 EHA와 단방향 로드형 EHA를 결합하여 이중화 시스템을 구성할 때 발생될 수 있는 유량 간섭 문제를 해결한 유압회로를 제시하 였다. 향후 계획으로서 실험 장치를 제작하고 카운터 발란스 밸브의 정밀한 튜닝과 그 효과를 확인할 예정 이다.
후 기
본 연구는 국방과학연구소의 2012년도 핵심기술(응 용연구) 개발 사업의 지원을 받아 한화테크엠㈜에서 수행하는 “EHA 개발” 과제의 위탁연구로 수행된 것 임.
참 고 문 헌
[1] Kim, D.H., Hong, Y.S. & Kim, D.M., “Performance analysis of an electro- hydrostatic actuator, J. KSAE, 2007, vol. 35, No. 4, pp. 316-32
[2] Truong, D.Q., Ahn, K.K., “Force control for press machines using an online smart tuning fuzzy PID based on a robust extended Kalman filter”, Expert Systems with Applications, vol. 38, 2011, pp.
5879-5894
[3] Hong, Y.S., Kim, S.S., Kim, D.H., Kim, S.B.,Park, S.J., Choi,K.H.,“ Improvement of a hydraulic circuit for an electro- hydrostatic actuator equipped with a single rod cylinder”, Proc. of 2013 SASE Fall Conference
저 자 소 개