DOI : 10.5515/KJKIEES.2011.22.1.016
「이 연구는 국방과학연구소(Agency for Defense Development) 연구비의 지원으로 수행되었음.」
영남대학교 전자공학과(Department of Electronic Engineering, Yeungnam University)
․논 문 번 호 : 20100908-130
․교 신 저 자 : 김경태(e-mail : [email protected])
․수정완료일자: 2010년 11월 23일
GPS/IMU를 이용한 SAR 영상의 요동 보상 기법에 대한 연구
SAR Motion Compensation Using GPS/IMU
김 동 현․박 상 홍․김 경 태
Dong-Hyun Kim․Sang-Hong Park․Kyung-Tae Kim 요 약
본 논문에서는 레이더 플랫폼의 요동에 의해서 흐려진SAR(Synthetic Aperture Radar) 영상의 위상 오차를 보 상하기 위하여GPS(Global Positioning System)/IMU(Inertial Measurement Unit) 데이터를 이용한 요동 보상 기법을 소개한다. 실제 비행 궤적의 경우 대기의 왜란(turbulence)에 의한 항공기의 pitch, roll 및 yaw 운동에 의해 레이더 의 플랫폼은 속도 변화가 생기고, 또한, 이상적인 궤적에서 벗어나게 된다. 이로 인한 along-track 속도 오차와
펄스간 위상 오차로 인해SAR 영상은 흐려지게 된다. 요동 보상을 수행할 경우, 이러한 오차를 줄여서 영상의
품질을 개선할 수 있다. 시뮬레이션 결과, 레이더 플랫폼에 요동이 있을 경우 이 논문에서 소개한 요동 보상
기법은 흐려진SAR 영상의 품질을 개선하는데 효율적임을 알 수 있다.
Abstract
This paper suggests a motion compensation technique using GPS/IMU data in order to compensate for phase error caused by undesired motion of radar platform. An actual flight trajectory would be deviate from an ideal straight- constant trajectory with a constant velocity for SAR imaging, due to pitch, roll and yaw motion of aircraft caused by turbulence. This leads to blurred SAR images due to inter-pulse phase errors as well as along-track velocity errors.
If the motion compensation is carried out to reduce those errors, SAR image quality can be significantly improved.
Simulation results show that the motion compensation technique introduced in this paper is an effective tool to improve SAR image quality against severe motion of radar platform.
Key words : SAR, GPS, IMU, PRF, Motion Compensation
Ⅰ. 서 론
일반적으로 레이더는 시간 영역에서 매우 짧은 펄스를 발생하여 레이더의 안테나 방향과 표적을 잇 는 가시선(line of sight) 방향으로 고해상도의1차원 영상을 얻을 수 있다. 레이더와 표적 간의 가시선 방 향의 해상도를 거리 분해능(range resolution)이라고 한다. 이러한 거리 분해능은 레이더 시스템의 주파 수 대역폭이 넓을수록 향상된다. 가시선 방향과 수
직 방향의 해상도를 방위 분해능(azimuth resolution) 이라고 한다. 방위 분해능은 레이더 안테나의 빔 폭 (beam width)이 작을수록 향상된다. 하지만, 안테나 의 빔 폭이 작기 위해서는 안테나의 개구면(aperture) 크기가 매우 커져야 한다. 이러한 단점을 극복하고 방위 분해능을 향상시켜 고해상도의 2차원 레이더 영상을 얻기 위하여 SAR 개념을 도입하였다
[1]
.SAR 시스템은 여러 위치에서 수신된 레이더 신 호를 위상이 일치하도록 코히어런트(coherent)하게
합성하여 방위 분해능을 향상시킨다. 이러한 원리를 이용하여 얻은 고해상도의 SAR 영상은 항공기, 인 공위성 및 우주선에 탑재되어 육지, 해양, 극지, 대 기, 그리고 행성 원격 탐사에 있어서 중요한 자료를 제공하고 있다
[2]
.항공기에 탑재되는SAR 시스템은 일반적으로spot- light 모드와stripmap 모드를 사용한다. Spotlight 모 드는 관심 영역에 대하여 지속적으로 안테나를 지향 하며 촬영하므로 stripmap 모드보다 고해상도의 영 상을 얻을 수 있다. 하지만, 항공기의 경우 비행 경 로가 정해져 있다고 하더라도, 대기의 왜란(turbulen- ce) 및 항공기의pitch, roll 및yaw 운동 등에 의하여 원하는 경로로 비행하지 못한다. 일반적으로 항공기 에 장착된 IMU, GPS를 이용하여 항공기의 위치를 실시간으로 파악하고, 이를 이용하여 비행 경로를 일정하게 유지할 수 있지만, IMU 및GPS 측정 오차 로 인하여 항상 경로 오차가 존재한다. 이러한 여러 원인으로 인한 항공기의 위치 오차를 보정하지 않으 면SAR 영상이 흐려지게 된다. 참고로 현재 군사적 으로 사용되는SAR 시스템 대부분의 중심 주파수는
X-band를 사용하고 있으며, 이 논문 역시 중심 주파
수는 X-band를 이용한다.
본 논문에서는spotlight 모드SAR 영상 품질 향상 을 위하여GPS/IMU 데이터를 이용한 요동 보상 기 법을 소개한다.
Ⅱ. 요동으로 인한 SAR 신호 위상의 영향
2-1 Along-track 오차Along-track 오차는 항공기 진행 방향에 대한 오차
이다. 이는PRF가 고정된 상태에서 항공기 속도 및 가속도가 변하게 될 경우 레이더 펄스가 공간에서 균일한 간격으로 송수신되지 않아 발생한다. 이러한
along-track 오차를 해결하기 위한 방안으로 크게 두
가지가 있다(그림1 참조). 첫 번째는 실시간으로 항 공기 궤적을 측정하여 공간 샘플링 간격이 일정하도 록PRF를 동적으로 제어하는 방법이고, 두 번째는 불균일한 간격에서 수신된 데이터를 균일한 간격으 로 내삽하는 것이다. 전자의 경우 레이더 하드웨어
및GPS/INS 시스템이 매우 정교해야 하며, 두 번째
경우는 더 높은 사양의 SAR 프로세서가 요구된다.
그림 1. Along-track 오차 제거 Fig. 1. Along-track error elimination.
본 논문에서는 전자의 방법을 사용하여 실시간으로 PRF를 제어하는 시뮬레이션을 수행한다.
2-2 Along-track 오차 보상
레이더 플랫폼이 초기 위치
에서 출발하여 일 정 속도
로 직선으로 비행할 경우,
번째 펄스는 다음 식과 같이 균일한 간격으로 송신된다.
(1)
는 펄스 반복 시간, 즉, PRF의 역수이다. 만 약 플랫폼이 대기 왜란(turbulence)에 의한 영향을 받 는다면, 위치 및 펄스 번호 사이의 관계식은 식(1)과 같은 선형 관계가 아니라 다음과 같이 적분 관계식 이 된다.
(2)따라서 현재 센서에 의해 측정된 위치 및 속도를 이용하여 다음 펄스를 송신하기 위한 시간
를 예측해야 한다. 프로세서의 반응 시간을
라 할 경우,
는
의 데이터 를 이용하여 예측되어야 한다. k번째 펄스의 송신 시 간t OPT
k를 예측하기 위한 방정식은 다음과 같다.
(3) 위 방정식은 아래와 같이 반복적으로 풀어야 한다.
;
(4)
그림 2. Cross-track 오차 Fig. 2. Cross-track error.
여기서
은
(5) 펄스의 수(
)가aperture 길이/(PRI×비행기의 속도) 되는 지점에서 펄스의 송신 시간을 계산하기 위한 식(4)의 반복적 계산은 종료된다.2-3 Cross-track 오차
Cross-track 오차는along-track과 수직 방향의 오차 이다. 그림 2에서 보는 바와 같이cross-track 오차가 발생할 경우, 레이더 신호의 진행 시간(propagation
time)이 변화되어 신호의 위상에 오차가 생긴다. 이
러한cross-track 오차는along-track 오차에 비해 영상 의 품질에 훨씬 더 큰 영향을 주므로 반드시 보상되 어야 한다.
2-4 Cross-track 오차 보상
Cross-track 오차를 보상하기 위해 그림 2에서 표 시된
∆
만큼의 위상을 신호에 곱하여 보상하는 기 법을 적용하였다. 여기서∆
은 각 축으로 프로젝션 시킨∆ ∆ ∆
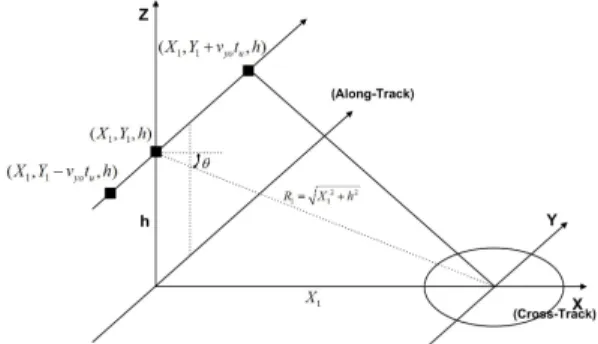
로 표현할 수 있다.그림3에서 이상적인 경우, 각fast-time 주파수별 로 수신된SAR 신호는 다음과 같이 나타낼 수 있다.
exp
(6) 여기서
여기서
는 along track 방향의 slow-time 변수(u),
는 지상 표적의 좌표,
는 표면 산란 패턴,그림 3. 3차원SAR 데이터 측정 구조
Fig. 3. Data measurement geometry of 3D SAR.
,
는 플랫폼의 좌표,
는slant range,
는along-tra- ck 방향의 속도,
로wave number이다. 따라 서u
는
이다.
이고,
은 합성 개구면 길이의 절반, 즉, 2
은 항공기가 비행한 거리이며, 비행 시 간
는
이다.
는
이다. 앞 절에서 시뮬레이션 한 대기 왜란으로 인하여 비행 궤적이 변하게 될 경우 다음과 같은 식으로 나타낼 수 있다.
exp
(7) 여기서,
cos
sin
(8) 는 대기 왜란으로 인한 요동이 있을 경우 slow-time 에 따른 표적 영역 중심과 레이더 사이의 거리이다. 이상적인 경우 표적 영역 중심과 레이더 사이의 거 리는 다음과 같다.
(9) 따라서
에 대해 표적 영역 중심을 기준으로 보상해야 한다. 본 논문에서는 다 음 식과 같이 요동 보상을 수행한다. exp
(10) 각 관측 지점의 range profile의 주파수 영역에서 표적 영역 중심에 대한 거리 차이를 기준으로 하여range profile의 위상을 이동시켜 요동을 보상한다
[3]
.Ⅲ. 비행 궤적 시뮬레이션
본 논문에서 사용된 비행 궤적 시뮬레이션을 위 한 대기 왜란(turbulence) PSD(Power Spectral Density) 데이터 파일 및 실행 프로그램 순서도는 그림 4와 같다.
그림 4에서 보이는 바와 같이, Kolmogrove fac-
torization을 통하여6가지 성분들의 시간에 따른 가
속도 변화가 얻어지면, 이를 적분하여 실제 비행 궤 적을 계산한다. 또한, 랜덤한 센서 오차를 추가하여 측정된 궤적을 계산한다. 하지만, 이 두 궤적들은 PRF 제어가 되기 전의 값들이므로, 식(4)를 이용하 여 모든 시간에서
를 계산한 후, 이들을 계산된
에 대하여 내삽을 하여 최종적으로 실제 궤적 을 얻는다.시뮬레이션 시PRF는500 Hz, 항공기의 속도는100 m/s, 비행 시간은53.72초, 속도 샘플링 주파수는LN- 100G 센서와 같은256 Hz, 각도 샘플링 주파수는64 Hz, 위치, 속도 및 각
도의 양자화 오차는 각각 2—17
m/s, 2—19
m/s, rad/s2
로 가정하였다. 사용된 대기 왜란의 종류는 중간 왜란(medium turbulence)이다.그림5(a)~(c)는X, Y, Z 성분별로 시간에 따른 궤 적의 변화를 나타낸다. Nominal은 요동이 없는 이상 적인 비행 궤적이다. True는 대기 왜란으로 인한 실 제 궤적이고, measured는 센서 오차가 있을 경우 실 제 무인 항공기에서 사용되는 센서(LN-251)에서 측
그림 4. 시뮬레이션 순서도 Fig. 4. Simulation flow-chart.
(a) X 성분(cross-track)
(b) Y 성분(along-track)
(c) Z 성분(vertical-track)
그림 5. 3차원 비행 궤적의 X, Y, Z 성분 Fig. 5. X, Y, Z component of 3D trajectory.정된 궤적이다.
위 그림에서 보는 바와 같이, Y 방향은along-track
방향이므로PRF가 제어되어nominal 궤적과 많은 차 이가 나지 않는다. 하지만, cross-track 방향인X축 방 향은 요동으로 인한 많은 변화가 생긴다. 따라서SAR
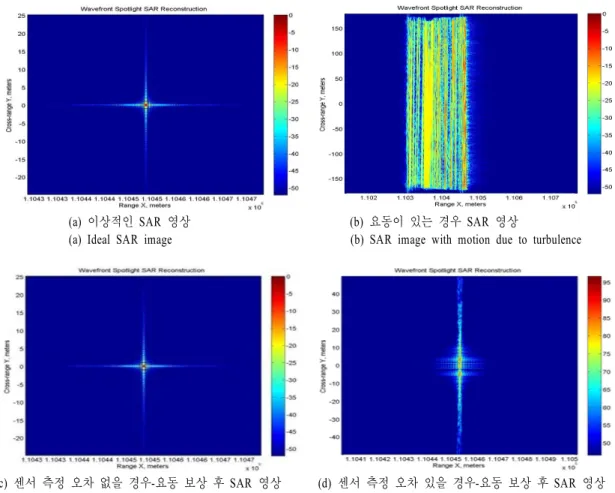
(a) 이상적인 SAR 영상 (b) 요동이 있는 경우 SAR 영상
(a) Ideal SAR image (b) SAR image with motion due to turbulence
(c) 센서 측정 오차 없을 경우-요동 보상 후 SAR 영상 (d) 센서 측정 오차 있을 경우-요동 보상 후 SAR 영상 (c) SAR image after motion compensation without sensor errors (d) SAR image after motion compensation with sensor errors
(e) Autofocus후 그림 6(d)의 영상 (e) Fig. 6(d) image after autofocus
그림 6. 표적 영역 중심 산란원의SAR 영상
Fig. 6. SAR image of a scatter at scene center.
신호의 위상에 많은 영향을 주게 된다. Z 방향 또한
오차가1~6미터로X-band 전파의 파장에 비해 매우
크므로SAR 신호의 위상에 많은 영향을 주게 된다.
Ⅳ. 요동 보상 수행 및 결과
요동 보상이 효율적으로 수행되고 있는지 확인하
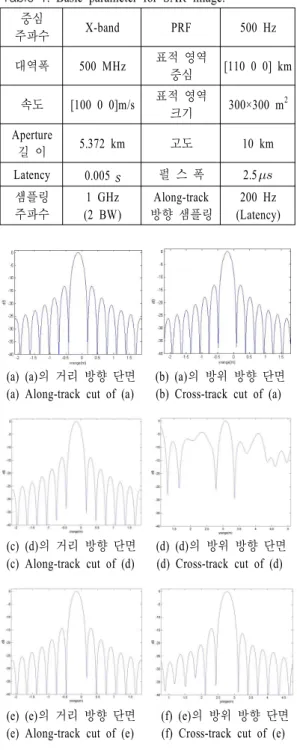
표 1. SAR 신호 형성을 위한 기본 변수들 Table 1. Basic parameter for SAR image.
중심
주파수 X-band PRF 500 Hz
대역폭 500 MHz 표적 영역
중심 [110 0 0] km 속도 [100 0 0]m/s 표적 영역
크기 300×300 m 2 Aperture
길 이 5.372 km 고도 10 km
Latency 0.005 s 펄 스 폭 2.5
샘플링 주파수
1 GHz (2 BW)
Along-track 방향 샘플링
200 Hz (Latency)
(a) (a)의 거리 방향 단면 (b) (a)의 방위 방향 단면 (a) Along-track cut of (a) (b) Cross-track cut of (a)
(c) (d)의 거리 방향 단면 (d) (d)의 방위 방향 단면 (c) Along-track cut of (d) (d) Cross-track cut of (d)
(e) (e)의 거리 방향 단면 (f) (e)의 방위 방향 단면 (e) Along-track cut of (e) (f) Cross-track cut of (e)
그림 7. 그림 6(a), (d), (e)의 거리 및 방위 방향 단면 Fig. 7. Down range and cross range cut of Fig. 6(a),(d), (e).
기 위해서 센서 오차는 없고 요동만 있는 궤적(그림
5에서 true)을 사용하여 요동 보상을 수행하고, 이를
요동이 없는 이상적인SAR 영상과PSLR(Peak Side- Lobe Ratio), ISLR(Integrated Sidelobe Ratio), 해상도 값을 비교하였다. 센서 오차가 있는 궤적을 사용할 경우(그림5에서measured) 요동 보상을 수행하여도 센서 오차로 인하여 그림 6(d)와 같이cross-track 방 향으로SAR 영상은 흐려지게 된다. 이는SAR 알고 리즘 끝단에서 수행되는 자동 초점 기법(autofocus) 으로 개선할 수 있다(그림 6(e) 참조).
그림6(c)에서 센서 측정 오차가 없을 때-요동 보 상 후SAR의 영상과 요동이 없는 이상적인SAR 영 상(그림6(a) 참조)을 비교했을 때 두 영상은 대등하 게 보이며, 실제 해상도, PSLR, ISLR를 비교해도 거 의 일치한다. 따라서 표적 영역에 있는 산란원은 매 우 정확하게 요동 보상이 된다. 또한, 센서 측정 오 차가 있을 경우(그림 6(d) 참조) along-track 방향의 오차는 요동 보상으로 제거되었지만cross-track 방향 오차는 남아 있음을 볼 수 있다. 이 남은 오차는 자 동 초점 기법을 통하여 제거하였고, 이때SAR 영상 (그림 6(e) 참조)의PSLR, ISLR는 자동 초점 기법전
표 2. 그림 6(a), (d), (e)의 해상도, PSLR, ISLR Table 2. Resolution, PSLR, ISLR of Fig. 6(a), (d), (e).
해상도(m) 이상적인
SAR(a)
자동 초점 기법전 SAR(d)
자동 초점 기법후 SAR(e) Down range 0.2672 0.2720 0.2744 Cross range 0.2559 0.2919 0.2924
PSLR(dB) 이상적인
SAR(a)
자동 초점 기법전 SAR(d)
자동 초점 기법후 SAR(e) Down range —13.2596 —13.8766 —14.3103 Cross range —13.2582 —0.3810 —14.2631
ISLR(dB) 이상적인
SAR(a)
자동 초점 기법전 SAR(d)
자동 초점
기법후
SAR(e)
Down range —9.6461 —10.2736 —10.7069
Cross range —9.7467 8.9357 —10.8797
SAR 영상(그림 6(d) 참조)보다 cross-track 방향에서 많이 향상되었음을 표2에서 볼 수 있다. 여기서 사 용된 자동 초점 기법은 엔트로피 최소화 기법을 이 용하였다. 하지만, 이상적인SAR 영상의 결과와 비 교했을 때 약간의 해상도 손실이 발생하였다.
Ⅴ. 결 론
본 논문에서는 chirp 펄스 레이더 기반에서 레이 더 플랫폼의 요동으로 인해 흐려진SAR 영상의 위 상 오차를 제거하기 위하여, GPS/IMU를 기반으로 한 요동 보상 알고리즘을 소개하였다. 시뮬레이션 결과, 센서 오차가 없을 경우 요동 보상이 잘 수행됨을 알 수 있었다. 하지만 센서 오차가 있을 경우along-
track 방향의 오차는 요동 보상으로 제거되었지만
cross-track 방향의 오차는 남아 있음을 볼 수 있었다. 이는SAR 알고리즘 끝단에서 자동 초점 기법을 수 행함으로써 제거할 수 있음을 보였다. 하지만 자동 초점 기법을 수행한 결과, 자동 초점 기법전SAR 상 의 해상도보다 미세하게 저하되는 결과가 나왔다. 해상도는PSF mainlobe의 최고점(peak)에서 좌우로3 dB만큼 떨어지는 넓이로 정의되는데, 자동 초점 기 법을 수행함으로 인해sidelobe의 에너지가mainlobe 로 모이면서 폭이 넓어짐으로 인해 미세한 해상도 손실을 가지고 왔다. 하지만 PSLR, ISLR은 좋아져 영상의 품질은 많이 개선되어졌음을 볼 수 있었다.
김 동 현
2006년 2월: 영남대학교 전자공학 과 (공학사)
2009년 3월~현재: 영남대학교 전자 공학과 석사과정
[주 관심분야] 레이더 영상, 레이더 신호 처리
참 고 문 헌
[1] W. G. Carrara, R. S. Goodman, and R. M. Majewski,
Spotlight Synthetic Aperture Radar-Signal Process- ing Algorithms, Norwood: MA: Artech House, 1995.
[2] M. T. Fennell, R. P. Wishner, "Battlefield awarene- ss via synergistic SAR and MTI exploitation", IEEE
Aerospace and Electronic Systems Magazine, vol.
13, no. 2, pp. 39-45, 1998.
[3] S. Buckreuss, "Motion compensation for airborne SAR based on inertial data, RDM and GPS", Interna-
tional Geoscience and Remote Sensing Symposium, IGARSS94, pp. 1971-1973, 1994.
[4] Gianfranco Fornaro, Giorgio Franceschetti, and Ste- fano Perna, "Motion compensation errors: Effects on the accuracy of airborne SAR images", IEEE Ae-
rospace and Electronic Systems Magazine, vol. 41,
no. 4, pp. 1338-1352, 2005.[5] M. Soumekh, "Digital spotlighting and coherent su- baperture image formation for stripmap synthetic aper- ture radar", Proc. Int. Conf. Image Process., Aus- tic, TX, pp. 476-480, Nov. 1994.
[6] Ian G. Cumming, Frank H. Wong, Digital Process-
ing of Synthetic Aperture Radar Data Algorithms and Implementation, Artech House, Inc., 2005.
박 상 홍
2004년 2월: 포항공과대학교 전자전 기공학과 (공학사)
2007년 2월: 포항공과대학교 전자전 기공학과 (공학석사)
2010년 2월: 포항공과대학교 전자전 기공학과 (공학박사)
2010년 9월~현재: 국립부경대학교 전자공학과 전임강사
[주 관심분야] 레이더 표적 인식, 레이더 영상, 레이더 신
호 처리, 패턴 인식, 스펙트럼 추정 등
김 경 태