CopyrightⒸ2016 KSAE / 144-03 pISSN 1225-6382 / eISSN 2234-0149 DOI http://dx.doi.org/10.7467/KSAE.2016.24.5.512 Transactions of KSAE, Vol. 24, No. 5, pp.512-519 (2016)
4WD 차량의 후륜 구동력 제어를 위한 구동시 노면마찰계수 추정에 관한 연구
박 재 영1)․심 우 진1)․허 승 진*2)
국민대학교 자동차공학전문대학원1)․국민대학교 자동차공학과2)
A Study of Tire Road Friction Estimation for Controlling Rear Wheel Driving Force of 4WD Vehicle
Jae-Young Park1)․Woojin Shim1)․Seung-Jin Heo*2)
1)Graduate school of Automotive Engineering, Kookmin University, Seoul 02707, Korea
2)School of Automotive Engineering, Kookmin Universiy, Seoul 02707, Korea (Received 11 February 2016 / Revised 3 May 2016 / Accepted 29 June 2016)
Abstract : In this study, the tire road friction estimation(TRFE) algorithm for controlling the rear wheel driving force of a 4WD vehicle during acceleration is developed using a standard sensor in an ordinary 4WD passenger car and a speed sensor. The algorithm is constructed for the wheel shaft torque, longitudinal tire force, vertical tire force and maximum tire road friction estimation. The estimation results of shaft torque and tire force were validated using a torque sensor and wheel force transducer. In the algorithm, the current road friction is defined as the proportion calculated between longitudinal and vertical tire force. Slip slop methods using current road friction and slip ratio are applied to estimate the road friction coefficient. Based on this study’s results, the traction performance, fuel consumption and drive shaft strength performance of a 4WD vehicle are improved by applying the tire road friction estimation algorithm.
Key words : Tire road friction coefficient estimation(타이어 노면마찰계수 추정), Wheel shaft torque estimation(휠 샤프트 토크 추정), Tire longitudinal force estimation(타이어 종방향 힘 추정), Tire vertical force estimation(타이어 수직방향 힘 추정), Four-wheel drive(4륜 구동차)
Nomenclature
1)V
Wheel: vehicle wheel speed, km/h V
Reference: reference vehicle speed, km/h λ : slip ratio, %
F
x: longitudinal tire force, N F
z: vertical tire force, N
Subscripts
current: current friction coefficient
*Corresponding author, E-mail: [email protected]
max: maximum friction coefficient RDM : rear drive module
DSSC : direct slip slope calculation KF : kalman filter
RLS : recursive least square 1. 서 론
1.1 연구 배경최근에 연비효율(fuel consumption)과 충돌 안전
성(crash safety), 가속성능(acceleration performance)
등이 차량의 주요 성능기준으로 여겨지고 있다. 일
4WD 차량의 후륜 구동력 제어를 위한 구동시 노면마찰계수 추정에 관한 연구
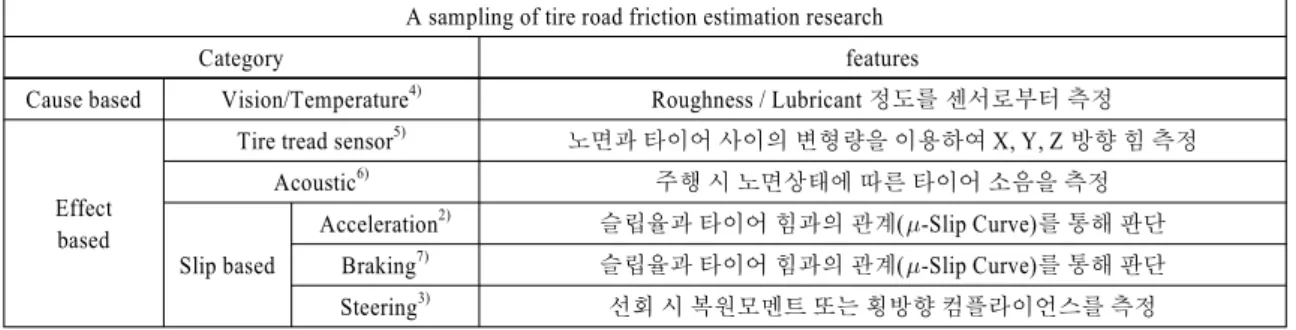
Table 1 Tire road friction estimation research
A sampling of tire road friction estimation research
Category features
Cause based Vision/Temperature4) Roughness / Lubricant 정도를 센서로부터 측정
Effect based
Tire tread sensor5) 노면과 타이어 사이의 변형량을 이용하여 X, Y, Z 방향 힘 측정
Acoustic6) 주행 시 노면상태에 따른 타이어 소음을 측정
Slip based
Acceleration2) 슬립율과 타이어 힘과의 관계(-Slip Curve)를 통해 판단 Braking7) 슬립율과 타이어 힘과의 관계(-Slip Curve)를 통해 판단
Steering3) 선회 시 복원모멘트 또는 횡방향 컴플라이언스를 측정
반 소비자들은 연비효율이 주로 파워트레인 시스템 의 영향을 받고, 수동 안전도(passive safety)는 차체 구조(body structure)에 지배적이라고 생각하기 쉽 다. 그러나 타이어와 노면 사이의 관계는 능동 안전 도(active safety)에 있어서 승차감(ride comfort) 및 핸 들링 성능은 물론 섀시 제어 시스템, 첨단 운전자 지 원 시스템(ADAS) 성능에 지대한 영향을 끼치게 된 다. 타이어와 노면 사이의 정보가 차량 거동에 미치 는 영향이 자명함에도 불구하고 기존의 차량 시스 템 설계에 대한 연구들은 타이어를 비롯한 각각의 부품 및 개별적인 차량 제어 시스템의 개발 및 성능 개선에만 초점이 맞추어져 있어 타이어의 노면마찰 계수와 차량 제어 시스템의 연계성을 고려하는 연 구가 필요하다. 이런 이유로 타이어 노면마찰계수 추정에 관하여 많은 연구가 수행되고 있다.
1.2 관련 연구동향
현재 노면마찰계수 추정에 대한 방법은 Table 1 과 같이 진행되고 있으며 크게 Cause based와 Effect based로 분류할 수 있다. Cause based는 마찰을 변화 시키는 요인에 대한 정보들을 이용하여 마찰계수를 추정하는 방식이며 차량이 노면을 통과하기 이전에 추정이 가능하다는 장점이 있다. Effect based는 주 행 중 마찰이 차량이나 타이어에 미치는 영향으로 인해 발생되는 정보들을 이용하여 노면마찰계수를 추정하는 방법이며 노면 통과 이후에 추정이 이뤄 진다. 대표적으로 Gustafsson
2)은 -Slip Curve의 기 울기를 이용하여 최대노면마찰계수를 추정하였으 며, Ray
3)는 타이어 힘을 추정하고 확률론적 방법을 이용하여 최대 노면마찰계수를 추정하였다.
본 연구에서는 Effect based에 해당하는 연구를 진
행하였으며 Slip based 중 가속상황에서의 마찰계수 추정 알고리즘을 개발하였다.
2. 노면마찰계수 추정기 알고리즘 타이어 최대 노면마찰계수( max)는 Fig. 1과 같이 타이어에 발생하는 총 마찰력의 크기는 횡방향 힘 과 종방향 힘의 합 벡터 크기를 초과하지 않는 캄의 마찰원 원리에 의해 설명할 수 있다.
1)
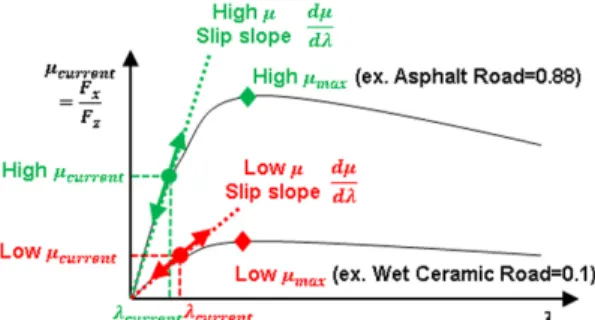
본 연구에서는 현재 노면마찰계수( current)를 정의 하는데 이것은 현재 발생되는 타이어 종방향 힘과 수직방향의 비를 의미한다. 타이어와 노면사이의 마찰계수, 그리고 슬립율과의 관계를 분석해보면 Fig. 2와 같이 노면에 따라 다른 개형을 보이는 것을 확인할 수 있다. 여기서 최대마찰계수는 슬립율이 어느 정도 발생 한 이후에 발생하게 되며 일반적으 로 마른 아스팔트노면의 경우 약 0.88, wet ceramic 노면의 경우는 약 0.1 정도의 값이라고 알려져 있다.
본 연구에서는 슬립율과 현재 노면마찰계수의 비 인 -Slip Curve의 기울기(slip slope)가 노면에 따라
Fig. 1 Kamm’s friction circle principle
Jae-Young Park․Woojin Shim․Seung-Jin Heo
Fig. 3 Maximum tire road friction coefficient estimation algorithm Fig. 2 -slip curve principle
다르게 발생하는 현상을 이용하여 최대 노면마찰계 수를 추정하고자 한다.
2.1 노면마찰계수 추정 알고리즘 개발
본 연구에서는 4WD 차량에서 얻을 수 있는 CAN 정보와 Gyro sensor의 차속을 기반으로 하여 구동 시 타이어 최대 노면마찰계수를 추정하였으며 추정 알 고리즘은 Fig. 3과 같다.
최대 노면마찰계수 추정 알고리즘에서는 휠 샤프 트 토크를 추정하고 타이어 종방향 힘, 타이어 수직 방향 힘을 추정하게 된다. 최종적으로 추정된 타이 어 종방향과 수직방향 힘의 비를 이용하여 각 휠의 현재 노면마찰계수( current)를 각각 연산하게 된다.
노면마찰계수 추정 알고리즘에서는 Fig. 4와 같
Fig. 4 -slip curve slip slope calculation
Fig. 5 Maximum tire road friction coefficient estimation
이 -Slip Curve의 기울기를 매순간 구하게 되며 기
울기를 계산하는 과정에서 세 가지의 방식을 사용
하였다. 첫 번째로는 노면마찰계수를 슬립율로 직
접 나누어 연산하는 방식인 DSSC 방식, 두 번째로
는 재귀식 필터 방식인 Kalman Filter 방식 마지막으
로 RLS 방식으로 노면마찰계수를 각각 추정하였다.
A Study of Tire Road Friction Estimation for Controlling Rear Wheel Driving Force of 4WD Vehicle
구해진 -Slip Curve의 기울기는 Fig. 5와 같이 미리 구해진 threshold 값을 기준으로 최대 노면마찰계수 를 구분하게 된다. 알고리즘 상에서는 추정된 최대 노면마찰계수 결과가 비 구동 시점에서는 1이라는 값을 산출하고 최대 노면마찰계수( max)가 고마찰 계수라고 판달 될 시에는 0.8, 저마찰계수일 때는 0.3이라는 값을 산출하도록 설계하였다.
2.2 슬립율 계산
차량의 슬립율( )을 구하는 방식은 구동 및 제동 시에 각각 다르게 적용된다. 그러나 본 연구에서 개 발한 마찰계수 추정 알고리즘은 구동 시점으로 제 한하였기 때문에 구동 시 슬립율만 고려하였다. 슬 립율은 휠 동적 반지름( ), 휠 각속도( ), 기 준 차량 속도( )를 이용하여 식 (1)과 같이 표현 할 수 있다.
), 기 준 차량 속도( )를 이용하여 식 (1)과 같이 표현 할 수 있다.
⋅
⋅
× (1)
2.3 샤프트 토크 및 종방향 타이어 힘 추정
차량의 휠 샤프트 토크를 추정하기 위해 엔진의 Torque(
), 엔진 RPM과 Turbine RPM 비에 따른 효율(
), Gear ratio 효율(
) 신호를 이용하여 트랜스미션에 전달되는 총 토크를 식 (2)와 같이 계 산하였다. 최종적으로 RDM의 엑츄에이터 토크 (
) 신호와 Differential gear 효율(
)을 이용 하여 각 구동축으로 전달되는 토크를 계산하였고 각 휠의 슬립율에 따른 토스 손실 계수(
)를 적용 하여 토크를 추정하였다. 슬립율에 따른 토크 손실 계수는 시험을 통해 구해진 맵으로 구성되었다. 전 후륜 토크 계산과 각 휠 샤프트로 전달되는 토크는 다음 식 (3) ~ (6)과 같이 나타낼 수 있다.
⋅ ⋅ ⋅ (2)
⋅ ⋅ (2)
(2)
(3)
(3)
⋅ (4)
(4)
⋅ (5)
(5)
⋅ (6)
(6)
여기서
는 전륜의 FL, FR을 의미하며
는 RL과 RR을 의미한다.
종방향 타이어 힘을 추정하기 위해 앞에서 추정 된 각 휠 샤프트 토크(
)와 휠 각가속도( ), 휠 관성모멘트(
), 휠 동적 반지름( )을 이용하여 힘 평형 방정식을 구성하였다. 종방향 타이어 힘을 구하는 과정은 식 (7)과 같다.
)을 이용하여 힘 평형 방정식을 구성하였다. 종방향 타이어 힘을 구하는 과정은 식 (7)과 같다.
⋅
(7) 여기서 는 각 휠 FL, FR, RL, RR 이다.
2.4 수직방향 타이어 힘 추정
수직방향 타이어 힘을 추정하기 위해 종방향 가 속도( )와 횡방향 가속도( ) 신호를 이용한 하중 이동 방정식을 세웠다. 식 (8) ~ (10)은 수직방향 타 이어 힘을 추정하기 위한 계산 과정이다.
) 신호를 이용한 하중 이동 방정식을 세웠다. 식 (8) ~ (10)은 수직방향 타 이어 힘을 추정하기 위한 계산 과정이다.
± ∆ ± ∆ (8)
± ∆ (8)
±
⋅
(9)
±
⋅
(10)
여기서
는 각 타이어의 정적 하중이며
∆ 는 종방향 하중 이동량, ∆
는 횡방향 하중 이동량이며 은 차량의 질량, 은 휠 베이스,
는 전륜 휠 베이스, 은 후륜 휠 베이스, 는 무게중심 점의 높이, 는 전륜 휠 트레드, 은 후륜 휠 트레드이다.
는 전륜 휠 트레드, 은 후륜 휠 트레드이다.
2.5 슬립 기울기의 계산
-Slip Curve의 슬립 기울기(slip slope)를 구하기
위해 우선 현재 노면마찰계수(
current)를 구해야 한
다. 현재 노면마찰계수는 식 (11)과 같이 구할 수
있다.
박재영․심우진․허승진
(11) 슬립율과 현재 노면마찰계수를 이용하여 슬립 기 울기를 다음 식 (12)와 같이 구할 수 있다.
(12)
3. 실차시험 검증
3.1 계측환경 구축4WD 차량의 실차 계측환경을 Table 2와 같이 구 축하였다. 추정된 휠 샤프트 토크를 검증하기 위해 차량의 각 FL, FR, RL, RR 휠 샤프트와 후륜으로 토 크를 전달해주는 propeller 샤프트에 토크센서를 부 착하였으며 송신되는 토크센서 신호를 계측하기 위 해 토크센서 리시버를 차량 트렁크에 장착하였다.
또한 추정된 타이어 종방향과 수직방향 힘을 검증 하기 위해 FL과 RL 휠 부분에 각각 육분력계(wheel force transducer)를 장착하였다.
Table 2 Tire road friction estimation methods Sensor
Wheel force transducer (Wheel FL, RL)
Torque sensor telemetry (FL, FR, RL, RR,
Propeller)
Torque sensor receiver
RT3000 (Gyro sensor)
Compact rio Software (Veristand, Simulink)
- Sensor position
MATLAB/SIMULINK를 통해 알고리즘을 구성하 였으며 4WD 차량 각 휠의 정확한 슬립율을 구하기 위해 차량 무게중심 위치에 기준 차량속도를 계측 할 수 있는 Gyro 센서(RT 3000)를 부착하였다. 또한 National Instruments의 장비 Compact RIO를 통해 알 고리즘에 필요한 차량의 CAN 신호를 받아왔으며 설계된 로직으로부터 계산된 RDM 제어 입력 신호 를 다시 차량으로 송신할 수 있도록 구성하였다. 결 과를 실시간으로 모니터링하기 위해 VERISTAND 를 사용하여 GUI 환경을 구성하였다.
3.2 주행시험 시나리오
노면마찰계수 추정 결과의 정확성을 확인하기 위 해 다양한 구동 상황에 따른 시험을 실시하였으며 주행 시험 시나리오는 Fig. 6과 같다. 시험 노면은 총 네 가지로 homogeneous한 dry asphalt 노면과 wet ABS 노면에 대해 시험을 실시하였으며 노면의 상 태가 변하는 구간에서의 결과를 확인하기 위해 dry asphalt에서 wet ABS로 -Jump하는 상황과 wet ABS 에서 dry asphalt로 -Jump하는 상황에 대해서 시험 을 진행하였다. 시험 과정은 주행 조건 준비 구간과 실차시험 계측 구간으로 구분되어지며 주행 조건 준비 구간에서는 차량의 초기 속도를 0, 20, 40 km/h 를 유지하게 되고 실차시험 계측 구간에서는 차량 을 0.2, 0.3 g으로 가속시키며 시험 노면을 통과하는 시 험 시나리오를 선정하였다. 노면마찰계수 추정결과
Fig. 6 Driving test scenario
4WD 차량의 후륜 구동력 제어를 위한 구동시 노면마찰계수 추정에 관한 연구
의 반복성을 확인하기 위해 각 조건마다 7회 이상씩 반복시험을 진행하였다.
3.3 시험 결과
본 연구에서는 시험 노면이 좌우가 균일한 homo- geneous한 노면이었으며 구동력이 주로 전달되는 주 구동륜이 전륜이기 때문에 전륜 좌측(FL) 휠에 대해서만 시험결과를 정리하였다.
토크 추정 알고리즘을 검증하기 위해 dry asphalt 에서 초기속도 0 km/h, 종방향 가속도 0.2 g으로 test 를 실시하였으며 Fig. 7은 토크센서를 통해 검증한 결과이다.
타이어 종방향 힘 알고리즘을 검증하기 위해 dry asphalt에서 초기속도 0 km/h, 종방향 가속도 0.2 g으 로 test를 실시하였으며 Fig. 8은 육분력계를 통해 검 증한 결과이다.
타이어 수직방향 힘 알고리즘을 검증하기 위해 dry asphalt에서 초기속도 0 km/h, 종방향 가속도 0.2 g으 로 test를 실시하였으며 Fig. 9는 육분력계를 통해 검
Fig. 7 Wheel shaft torque validation result
Fig. 8 Longitudinal tire force validation result
증한 결과이다.
Fig. 10은 dry asphalt 에서 초기속도 0 km/h, 가속 조건 0.2 g 상황에서 최대 노면마찰계수를 추정한 결과이다. DSSC, Kalman Filter, RLS 세가지 방식 모 두 우수한 추정 결과를 보였다.
Fig. 11은 wet ABS에서 초기속도 20 km/h, 가속조 건 0.3 g 상황에서 최대 노면마찰계수를 추정한 결 과이다. DSSC, Kalman Filter, RLS 세가지 방식 모두 우수한 추정 결과를 보였다. 추정시간의 경우 DSSC 방식은 1.58초, Kalman Filter 방식은 1.17초, RLS 방 식은 1.17초로 Kalman Filter와 RLS가 저노면마찰계 수를 감지하는 데에는 추정시간이 더 짧은 것을 확 인할 수 있다.
Homogeneous한 dry asphalt 노면과 wet ABS 노면
Fig. 9 Vertical tire force validation result
Fig. 10 Road friction estimation result of dry asphalt
Fig. 11 Road friction estimation result of wet abs road
Jae-Young Park․Woojin Shim․Seung-Jin Heo
Fig. 12 Mu slip curve result of dry asphalt and wet abs road test
Fig. 13 Road friction estimation result of wet abs to dry asphalt road test
에 대해 각각 실시한 결과를 -Slip Curve를 통해 비 교해 보았다. 두 노면에 대해 각각 시험한 결과는 Fig. 12와 같으며 결과에서 볼 수 있듯이 -Slip Curve의 기준 기울기 값으로 노면을 우수한 수준으 로 구분이 되는 것을 확인할 수 있다.
Fig. 13은 wet ABS에서 dry asphalt로 -Jump한 상 황이며 초기속도 40 km/h, 가속조건 0.3 g 상황에서 최대 노면마찰계수를 추정한 결과이다. DSSC, Kalman Filter, RLS 세가지 방식 모두 우수한 추정 성 능을 보였으며 -Jump 추정시간의 경우 DSSC 방식 은 0.2초, Kalman Filter 방식은 0.27초, RLS 방식은 0.88초로 DSSC 방식이 dry asphalt 노면으로의 변화 를 가장 빠르게 감지하였다.
Wet ABS에서 dry asphalt로 -Jump한 시험 결과 를 -Slip Curve를 통해 비교해 보았다. -Jump를 시 험한 결과는 Fig. 14와 같으며 결과에서 볼 수 있듯 이 -Slip Curve의 기준 기울기 값으로 노면을 우수 한 수준으로 구분이 되는 것을 확인할 수 있다.
Fig. 14 Mu slip curve result of wet abs to dry asphalt road test
Fig. 15 Road friction estimation result of dry asphalt to wet abs road test
Fig. 15는 dry asphalt에서 출발하여 wet ABS로 -Jump한 상황이며 초기속도 20 km/h, 가속조건 0.2 g 상황에서 최대 노면마찰계수를 추정한 결과이다.
DSSC, Kalman Filter, RLS 세가지 방식 모두 우수한 추정 결과를 보였다. 또한 -Jump 추정시간의 경우 DSSC의 방식은 0.34초, Kalman Filter 방식은 0.03초, RLS 방식의 경우 0.03초로 Kalman Filter와 RLS 방 식이 Wet ABS 노면으로의 변화를 가장 빠르게 감지 하였다.
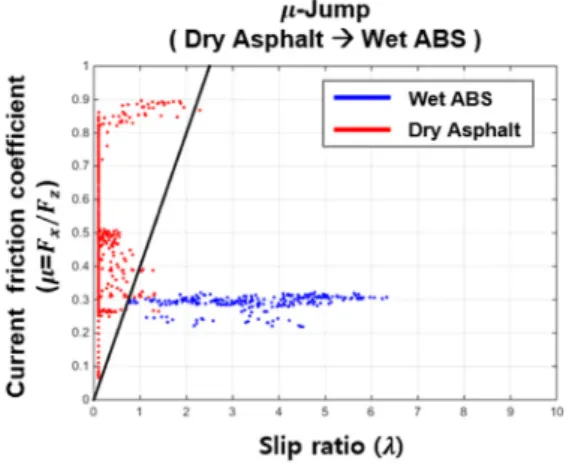
Dry asphalt에서 Wet ABS로 -Jump한 시험 결과 를 -Slip Curve를 통해 비교해 보았다. -Jump를 시 험한 결과는 Fig. 16과 같으며 결과에서 볼 수 있듯 이 -Slip Curve의 기준 기울기 값으로 노면을 우수 한 수준으로 구분이 되는 것을 확인할 수 있다.
4. 결 론
본 연구에서는 4WD 차량의 연비 및 구동성능 확
보와 -Jump시 구동계 충격 감소시키는 것을 목적
A Study of Tire Road Friction Estimation for Controlling Rear Wheel Driving Force of 4WD Vehicle
Fig. 16 Mu slip curve result of dry asphalt to wet abs road test
으로 구동시 타이어 최대 노면마찰계수를 추정하였 다. 구동 시 최대 노면마찰계수를 추정하기 위해 실 차 주행 시험 환경을 구축하였으며 구동 시 최대 노 면마찰계수 추정기를 개발하였다. -Slip Curve의 기준 기울기 값으로 노면을 우수한 수준으로 구분 할 수 있었으며 상기의 주요 연구 추진 내용과 관련 하여 얻어진 주요 결론 내용은 다음과 같다.
1) 토크센서 및 육분력계(wheel force transducer)와 유사수준으로 추정할 수 있는 휠 샤프트 토크, 종 방향, 수직방향 타이어 힘 추정기를 개발하였다.
2) 슬립율과 타이어 힘과의 관계( -Slip Curve)를 이용하여, 구동 시 고마찰계수 및 저마찰계수 노 면을 구분할 수 있는 노면마찰계수 추정기를 개 발하였다.
3) 실차 시험을 통한 노면마찰계수 추정 알고리즘 의 성능을 검증하였다.
향후에는 개발된 노면마찰계수 추정기를 4WD 차량에 적용하여 후륜 구동력을 상황에 맞게 제어 함에 따라 연비 및 구동성능을 향상시킬 수 있을 것 이다. 또한 종방향 횡방향 제어로직과 통합하여 eLSD, torque vectoring 등에 적용할 수 있으며 노면 마찰계수 추정을 통해 active safety, AEB 등과 관련 된 ADAS 개발에 응용할 수 있을 것으로 기대된다.
후 기
본 연구는 현대 엔지비와 미래창조과학부 및정보 통신기술진흥센터의 ICT융합고급인력과정지원사업 의 연구결과로 수행되었음(IITP-2015-H8601-15-1005).
References
1) S. J. Heo, Vehicle Dynamics and Introduction, Moonwoondang, Seoul, 2001.
2) F. Gustafsson, “Slip-based Tire Road Friction Estimation,” Automatica, Vol.33, No.6, pp.1087- 1099, 1997.
3) L. Ray, “Nonlinear Tire Force Estimation and Road Friction Identification : Simulation and Ex- periments,” Automatica, Vol.33, No.10, pp.1819- 1833, 1997.
4) S. Koskinen, “Sensor Data Fusion Based Esti- mation of Tyre-Road Friction to Enhance Colli- sion Avoidance,” VTT Publication 730, 2010.
5) J. H. Lee, J. O. Kim and S. J. Heo, “Deve- lopment of Tire Vertical Force Estimation Algorithm in Real-time Using Tire Inner Sur- face Deformation,” Transactions of KSAE, Vol.21, No.3, pp.142-147, 2013.
6) S. Mueller, M. Uchanski and K. Herdrick,
“Estimation of the Maximum Tire-Road Fric- tion Coefficient,” Journal of Dynamic System, Measurement, and Control, Vol.125, No.4, pp.607-617, 2003.
7) U. Kiencke and A. Daiß, “Estimation of Tyre Friction for Enhanced ABS Systems,” Pro- ceedings of AVEC, 1994.