학 술 논 문
129
외골격 로봇의 동작인식을 위한 보행의 운동학적 요인을 이용한 보행유형 분류
조재훈·봉원우·김동현·최현기
성균관대학교
Gait Type Classification Based on Kinematic Factors of Gait for Exoskeleton Robot Recognition
Cho Jaehoon, Bong wonwoo, Kim donghun and Choi Hyeonki
Sungkyunkwan University
(Manuscript received 25 May 2017 ; revised 20 June 2017 ; accepted 22 June 2017)
Abstract: The exoskeleton robot is a technology developed to be used in various fields such as military, industry and medical treatment. The exoskeleton robot works by sensing the movement of the wearer. By recognizing the wearer’s daily activities, the exoskeleton robot can assist the wearer quickly and efficiently utilize the system. In this study, LDA, QDA, and kNN are used to classify gait types through kinetic data obtained from subjects. Walking was selected from general walking and stair walking which are mainly performed in daily life. Seven IMUs sensors were attached to the subject at the predetermined positions to measure kinematic factors. As a result, LDA was clas- sified as 78.42%, QDA as 86.16%, and kNN as 87.10% ~ 94.49% according to the value of k.
Key words: Gait, Exoskeleton robot, Kinematics, IMUs sensor, Machine learning
I. 서 론
외골격 로봇은 21세기 초부터 사람의 움직임을 보조하여 군, 산업현장에서 근로자의 근력을 증강시켜주고 체력소비 를 보완해주고 의료/재활에서는 노약자, 장애인의 거동을 보 조해주고 환자의 재활을 도와주며 계속 발전해왔다. BLEEX, HULC, XOS 등 국외의 외골격 로봇이 개발되어 왔으며, 국내에서는 HEXAR-CR, H-LEX등의 외골격 로봇이 개발 되고 있다[1-5]. 다양한 분야에 사용되는 외골격 로봇은 착 용자와 용도를 중심으로 시스템 구동, 동작의도 파악등 여 러 기술을 필요로 하며, 이 중 동작의도 파악은 착용자의 의 도를 인식하여 로봇이 이에 신속하게 반응하고 시스템을 효 율적으로 사용하는데 중요하다[6]. 동작의도 파악은 근전도 신호, 근부피신호와 같은 생체신호를 사용하거나 또 지면반 발력, 속도, 가속도와 같은 운동학, 운동역학 신호를 사용한
다[7-8]. 운동학과 관련된 속도, 가속도정보들은 크게 카메 라와 웨어러블센서를 활용하여 동작인식 연구가 진행되었다 [9-10]. 카메라는 이전부터 많은 연구들에 활용되어 정확한 결과를 얻을 수 있지만 비용, 공간의 활용성 측면에서 단점 을 가진다. 이에 비해 웨어러블센서는 카메라의 단점을 보 완하고 카메라를 통해 얻을 수 있는 결과만큼 높은 정확성 을 가질 수 있도록 발전하고 이런 장점으로 연구의 활용도 가 높아지고 있다[11-12].
본 연구는 6축 IMUs 센서를 활용하여 외골격 로봇에 활 용될 동작인식 분류기를 개발한다. 정상인 중심으로 한 동 작인식 분석을 목적으로 일상에서 흔히 일어나는 일반보행 과 계단보행을 위주로 연구를 진행한다.
II. 연구방법
1. 피실험자
피실험자는 과거 근골격계 병력과 질환을 가지지 않은 건 강한 성인 남성 10명(평균 키: 173.4 ± 6.73(cm), 평균 몸 Corresponding Author : Choi Hyeonki
Sungkyunkwan University
TEL: +82-31-290-7938 / E-mail: [email protected]
130
무게: 74.8 ± 14.5(kg)) 을 선정하였다. 피실험자는 10명 모 두 오른발잡이 였으며, 보행실험시 출발하지를 오른발로 선 정하였고 피실험자들에게는 실험의 내용을 충분히 숙지시키 고 실험을 진행하였다.
2. 실험절차
일반보행, 계단의 상승 및 하강보행 총 3가지 실험환경을 조성하였다. 하지의 관절각의 변화를 비교하기 위해 보폭, 보행속도를 제한하여 실험을 진행하였다. 보폭의 경우 양쪽 하지 사이가 40o가 되도록 기본보폭을 정하였다. 또한 보행 속도는 90step/min으로 제한하고 피실험자들이 정해진 보 행속도에 맞추어 보행할 수 있도록 메트로놈을 사용하여 충 분히 연습한 후 보행실험을 실시하였다. 계단보행실험에 사 용된 계단은 국내 주택건설기준등에 관한 규정 제 16조 1 항에 제시된 계단 규격에 의거 하여 계단 높이 14 cm, 깊 이 30 cm로 자체 제작하였다. 계단의 총 단수는 3단이며 계 단 기울기는 약 29o이다. 운동학 요소만을 활용하여 보행분 류를 실시하기 위해 지면반력기를 통해 얻은 데이터를 지도 군 데이터로 사용하였다. 일반보행의 경우 총 6걸음을 걷고 3, 4번째 걸음에서 지면반력기를 밟아 운동역학 요소를 측 정하였다. 또한 계단 보행의 경우에도 총 6걸음을 실시하고 보행에 영향을 주지 않도록 맨 윗 단을 제외한 1, 2단에 지 면반력기를 설치하여 운동역학 요소를 측정하였다. 각 보행 실험은 최소 10차례 이상 시행하고 그 중 임의의 10개의 데 이터를 분석하였다.
3. 실험장비
지면반력기는 Bertec사 AM6504 2대를 사용하여 1 kHz 로 샘플링하여 PC로 전달하였다. PC사양은 CPU의 경우 AMD FX-8300, GPU의 경우 NVIDIA Geforce GTX 750ti 4GB를 사용하였다. 운동학 요소는 그림 1과 같이 피 실험자의 하지에 6축 IMUs 센서 MPU-6050을 사용하여 총 7군데에 부착했고 양 하지의 고관절, 슬관절, 족관절의 관절각도의 변화를 100Hz로 샘플링되어 Arduino-mini를 통해 PC로 전달하였다. IMUs센서는 3축 accelermeter 센 서와 3축 gyro 센서가 결합된 센서로 accelrermeter 센서 를 통해 초기각도를 추정하고 gyro센서를 통해 각도의 변 화를 보정해준다. gyro 센서의 누적값의 오차가 발생하므로 이를 보안하기 위해 상보필터를 적용하였다[12]. 정 중앙 골 반에 1개, 양 하지의 대퇴골, 경골, 종골에 각 1개씩 부착 하여 총 7개의 센서를 부착하였다. 이전 연구에 따르면 IMUs센서를 부착할 때 각 골의 관상면 중앙에서 벗어날 경 우 실험 중 오차가 생길 수 있다[13]. 따라서 IMUs센서 부 착에 유의하였다. 통계분석 및 기계학습은 Python 통계라 이브러리인 Scipy와 Statsmodels와 기계학습 라이브러리
인 Scikit-learn를 사용하였다.
4. 데이터 특징추출
보행은 크게 입각기와 유각기로 구분하고 양 하지에서 상 대적으로 대칭이다. 입각기는 약 60%, 유각기는 약 40%를 차지한다. 보행주기는 한쪽 하지를 기준으로 입각기는 발바 닥 닿기, 중간 입각기, 말기 입각기, 전-유각기로 나뉘며, 유 각기는 초기 유각기, 중간 유각기, 말기 유각기로 나뉘어진 다[14]. 본 연구에서는 양 하지에서 데이터를 측정하고 입 각기와 유각기 그리고 양 하지가 동시에 지면에 닿고 있는 이중지지기 3가지 주기로 나누었다. 기존의 연구들은 한쪽 하지를 기준으로 보행을 분석하였지만 본 연구에서는 웨어 러블센서의 활용도를 높여 양쪽 하지에서 동시에 측정한 데 이터를 사용하였다. 3가지 주기는 지도군 데이터인 운동역 학 요소를 활용하여 왼쪽 하지가 입각기, 오른쪽 하지가 유 각기인 주기(LS: Left stance Right swing), 이중지지기 (DS: Double stance), 왼쪽 하지가 유각기, 오른쪽 하지가 입각기인 주기(RS: Left swing Right stance)로 구분하였 다. 피실험자별로 관절각의 오프셋을 실시하였다. 보행시 1 걸음당 0.67초의 시간이 소요되며 수집한 데이터의 3가지 주기가 일어나는 총 시간은 최대 1.09 ± 22.00초 걸린다.
IMUs 센서를 통한 샘플링 데이터는 100Hz로 설정하였으 므로 LS주기에 42.69 ± 4.12개, DS주기에 20.77 ± 1.65개, RS주기에 46.48 ± 21.65개의 운동학적 데이터군을 얻었다.
각 관절별로 10개의 군을 1개의 window로 설정하고 기초 통계적 추정치인 평균, 분산, 최댓값, 최솟값, 중앙값을 특 징점으로 적용하여 분류했으며 6군데의 관절과 5개의 특징 값으로 1 window당 30개의 데이터를 생성하였다. 데이터 군은 총 23917개이다.
그림 1. IMUs 센서 위치.
Fig. 1. Positions of IMUs sensors.
131 5. 특징분류 알고리즘
본 연구에서는 보행 및 주기를 검출하는데 3개의 알고리 즘을 사용하였다.
첫 번째 사용한 알고리즘은 LDA이다. LDA(linear dis- criminant analysis)란 클래스 Y에 대한 독립 변수 X의 조 건부 확률 분포가 공통된 공분산 행렬 Σ을 가지는 다변수 가우시안 정규분포라고 가정한다[15]. 즉
Σk=Σ for all k 식 (1)
이다. 이때는 조건부 확률 분포를 다음과 같이 정리할 수 있 다. 본 연구에서는 각 보행과 주기 9개를 클래스 Y로 정하 고 30개의 특징점을 독립변수 X이다. 식(2)의 변수 D는 클 래스의 전체개수에 대해 −1한 값으로 예를 들어 클래스의 개수가 3개일 경우, D = 2이다. 변수 w는 클래스의 중심을 최대화, 분산은 최소화 하게 사영하는 직선의 법선벡터이다.
변수 k, 변수 l은 서로 다른 클래스를 나타내며 µk의 경우 클 래스 k의 독립변수 X에 대한 평균값을 나타낸다. p(x|y=k) 는 사후확률, P(y=k)는 사전확률을 나타낸다.
식 (2)
식 (3)
식 (4)
식 (5)
즉, 조건부 확률 변수가 X에 대한 선형 방정식이 된다.
두 번째로 사용한 알고리즘은 QDA(quadratic dis- criminant analysis)로 판별 분석 분류 방법중 하나로, 클
래스 Y에 대한 독립 변수 X의 조건부 확률 분포가 다변수 가우시안 정규분포라는 가정을 한다[15].
식 (6)
이 분포들을 알고 있으면 독립 변수 X에 대한 클래스 Y 의 조건부 확률 분포는 다음과 같이 베이즈 규칙으로부터 구할 수 있다.
식 (7)
마지막은 kNN(k-Nearest Neighbor)으로 학습 데이터군 에서 가장 가까운 하나의 데이터만을 찾는 것이 아니라, 가 장 가까운 k개의 데이터를 찾아서 테스트 데이터군의 라벨 에 대해 투표하도록 하는 알고리즘이다. 여기서 k = 1인 경 우, 원래의 Nearest Neighbor 분류기가 된다. 직관적으로 k값이 커질수록 분류기는 이상점에 더 강인하고, 분류 경계 가 부드러워지는 효과가 있다[15].
3개의 알고리즘은 학습 데이터군 80%, 확인 데이터군 20%로 나누어 알고리즘을 검증하였고 학습 데이터군의 경 우 5겹 교차검증을 통해 학습 시 과적합을 방지하고 모형을 평가하였다.
III. 연구결과 및 고찰
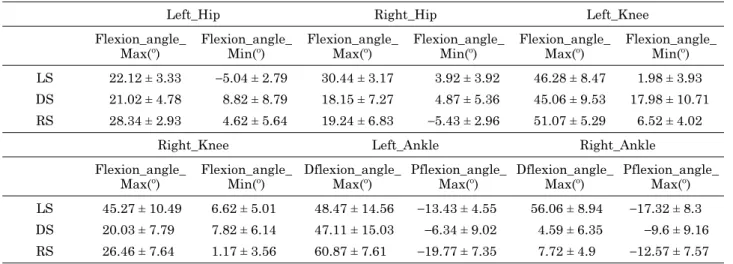
일반보행과 계단보행은 일상생활에서 가장 많이 수행하는 동작이다. 표 1-3에서 측정한 데이터를 피실험자별로 보행 및 주기의 관절각 최댓값, 최솟값의 평균 및 분산을 나타내 었다. 일반보행에서 고관절의 경우 유각기에 해당하는 하지 에서 최대 굴곡각도가 측정되었으며, 이중지지기시 굴곡각 도의 변화폭이 적음을 확인하였다. 슬관절의 경우 고관절과 마찬가지로 유각기에 해당하는 하지에서 최대굴곡각도를 보 이고 입각기에 해당하는 하지는 최대 폄이 일어남을 확인하 였다. 족관절의 경우 유각기에 해당하는 하지에서 관절의 변 화폭이 컸지만 입각기시에도 관절각의 변화폭이 큰 것으로 측정되었다. 계단 보행의 경우 일반보행의 비해 모든 관절 에서 관절각의 변화폭이 크게 관측되었으며 슬관절에서 특 히 90o에 근접 할 정도로 굴곡이 일어난 것을 확인하였다.
관절각의 최댓값과 최솟값을 비교, 분석한 결과 각 보행 및 주기별 로 특징을 가지는 것을 파악하였다. 이를 토대로 측 정한 데이터를 학습데이터와 확인데이터를 나누어 알고리즘 을 학습하였고 확인데이터를 통해 분류를 확인하였다. 알고 리즘 성능 평가는 알고리즘을 통해 검출한 결과를 토대로 식(8-10)의 정확도(Accuracy), 특이도(Specificity), 민감도 (Sensitivity)로 계산하였다.
p
log x y k( = ) 1 2π ( )D 2/ Σ 1 2/ ---
log 1
2--- x μ( – k)TΣ –1(x μ– k) –
= C0
1
2--- x μ( – k)TΣ –1(x μ– k) –
= C0 1
2--- x( TΣ –1x 2μ– kTΣ –1x+μkTΣ –1μk) –
=
C x( ) μkTΣ –1x 1 2---μkTΣ –1μk
– +
=
C x( ) C0 1 2---xTΣ –1x –
⎝ = ⎠
⎛ ⎞
p x y k( = ) C x= ( )exp(ωTkx ω+ k0) ωkT μkTΣ–1,ωk0 1
2---μkTΣ–1μk
–
= =
⎝ ⎠
⎛ ⎞
P y k x( = ) p x y k( = )P y k( = ) Σlp x y l( = )P y l( = ) ---
=
C x( )exp(ωkTx ω+ k0)P y k( = ) ΣlC x( )exp(ωkTx ω+ k0)P y l( = ) ---
=
Pkexp(ωkTx ω+ k0) ΣlPlexp(ωkTx ω+ k0) ---
=
P y k x( = )
log =
Pk
log ωkTx ωk0 (logPl+ωlTx ω+ k0)
∑l
–
+ + =ωTx ω+ 0
p x y k( = ) 1 2π ( )D 2/ Σk1 2/
--- 1
2--- x μ( – k)TΣk–1(x μ– k)
⎝– ⎠
⎛ ⎞
exp
=
P y k x( = ) p x y k( = )P y k( = ) p x( )
--- p x y k( = )P y k( = ) Σlp x y l( = )P y l( = ) ---
= =
132
Accuracy(%) = TP TN+ 식 (8) Specificity(%) = 식 (9) TP TN FP FN+ + +
--- 100× TN TN FP+ --- 100× 표 1. 일반보행시 굴곡각도.
Table 1. Flexion_angle during walking.
Left_Hip Right_Hip Left_Knee
Flexion_angle_
Max(o) Flexion_angle_
Min(o) Flexion_angle_
Max(o) Flexion_angle_
Min(o) Flexion_angle_
Max(o) Flexion_angle_
Min(o) LS 22.12 ± 3.33 −5.04 ± 2.79 30.44 ± 3.17 3.92 ± 3.92 46.28 ± 8.47 01.98 ± 3.93 DS 21.02 ± 4.78 8.82 ± 8.79 18.15 ± 7.27 4.87 ± 5.36 45.06 ± 9.53 17.98 ± 10.71 RS 28.34 ± 2.93 4.62 ± 5.64 19.24 ± 6.83 −5.43 ± 2.96 51.07 ± 5.29 06.52 ± 4.02
Right_Knee Left_Ankle Right_Ankle
Flexion_angle_
Max(o) Flexion_angle_
Min(o) Dflexion_angle_
Max(o) Pflexion_angle_
Max(o) Dflexion_angle_
Max(o) Pflexion_angle_
Max(o) LS 45.27 ± 10.49 6.62 ± 5.01 48.47 ± 14.56 −13.43 ± 4.55 56.06 ± 8.94 −17.32 ± 8.30 DS 20.03 ± 7.79 7.82 ± 6.14 47.11 ± 15.03 −6.34 ± 9.02 4.59 ± 6.35 00−9.6 ± 9.16 RS 26.46 ± 7.64 1.17 ± 3.56 60.87 ± 7.61 −19.77 ± 7.35 7.72 ± 4.90 −12.57 ± 7.57 표 2. 계단상승보행시 굴곡각도.
Table 2. Flexion_angle during upstair.
Left_Hip Right_Hip Left_Knee
Flexion_angle_
Max(o) Flexion_angle_
Min(o) Flexion_angle_
Max(o) Flexion_angle_
Min(o) Flexion_angle_
Max(o) Flexion_angle_
Min(o) LS 35.95 ± 4.46 3.04 ± 3.29 044.8 ± 5.93 18.38 ± 7.18 59.09 ± 7.84 6.22 ± 3.18 DS 33.78 ± 5.57 9.58 ± 6.28 35.01 ± 11.56 20.87 ± 9.27 053.3 ± 13.33 12.6 ± 8.66 RS 48.64 ± 7.82 8.19 ± 4.52 35.56 ± 11.28 01.73 ± 4.58 89.54 ± 15.97 9.46 ± 4.97
Right_Knee Left_Ankle Right_Ankle
Flexion_angle_
Max(o) Flexion_angle_
Min(o) Dflexion_angle_
Max(o) Pflexion_angle_
Max(o) Dflexion_angle_
Max(o) Pflexion_angle_
Max(o) LS 80.52 ± 15.31 29.73 ± 11.43 21.12 ± 13.79 −20.26 ± 5.97 69.29 ± 14.53 −5.04 ± 12.94 DS 55.43 ± 18.08 035.4 ± 14.02 14.62 ± 16.77 −19.33 ± 7.95 19.16 ± 11.19 006.2 ± 9.02 RS 57.84 ± 14.68 06.82 ± 5.41 84.95 ± 13.02 −23.65 ± 3.41 21.18 ± 12.07 −6.49 ± 4.44 표 3. 계단하강보행시 굴곡각도.
Table 3. Flexion_angle during downstair.
Left_Hip Right_Hip Left_Knee
Flexion_angle_
Max(o) Flexion_angle_
Min(o) Flexion_angle_
Max(o) Flexion_angle_
Min(o) Flexion_angle_
Max(o) Flexion_angle_
Min(o) LS 36.88 ± 5.46 10.77 ± 4.79 32.82 ± 2.81 9.47 ± 4.2 77.38 ± 7.91 18.51 ± 7.19 DS 36.22 ± 5.32 24.66 ± 4.8 21.86 ± 4.63 9.98 ± 4.5 76.69 ± 8.31 50.31 ± 6.69 RS 37.12 ± 5.77 15.43 ± 6.57 026.6 ± 3.42 6.54 ± 4.68 80.25 ± 9.21 15.53 ± 8.14
Right_Knee Left_Ankle Right_Ankle
Flexion_angle_
Max(o) Flexion_angle_
Min(o) Dflexion_angle_
Max(o) Pflexion_angle_
Max(o) Dflexion_angle_
Max(o) Pflexion_angle_
Max(o) LS 68.42 ± 12.61 13.04 ± 5.15 44.94 ± 10.8 −7.31 ± 2.9 62.8 ± 12.12 −28.02 ± 7.92 DS 25.47 ± 5.98 15.09 ± 6.09 44.64 ± 10.89 04.45 ± 4.17 7.72 ± 4.9 −12.57 ± 7.57 RS 48.11 ± 7.34 13.95 ± 5.67 58.35 ± 6.34 −22.3 ± 6.23 13.74 ± 6.12 −14.64 ± 6.72
133
Sensitivity(%) = 식 (10)
해당 클래스를 정확히 검출하는 경우는 TP(True Positive), 해당 클래스를 다른 클래스로 검출하는 경우는 FN(False Negative), 다른 클래스를 해당 클래스로 검출하는 경우는 FP(False Positive), 다른 클래스를 다른 클래스로 검출하 는 경우는 TN(True Negative)으로 하였다.
정확도(Accuracy)는 전체 샘플 중 맞게 출력한 샘플 수 의 비율, 특이도(Specificity)는 해당 클래스에 속한다고 출 력한 샘플 중 실제로 클래스에 속하는 샘플 수의 비율, 민 감도(Sensitivity)는 실제 클래스에 속한 샘플 중에 해당 클 래스에 속한다고 출력한 샘플의 수이다. 표 4에서 LDA의 정확도는 78.42%, QDA의 정확도는 86.16%를 분류가 가 능했고, kNN의 정확도는 87.10% ~ 94.49%를 나타내었다.
많은 특징 데이터의 사용은 분류 정확성을 저하시키는 요인 이 될 수 있으므로 표 1-3을 통해 나온 분석결과를 토대로 슬관절, 슬관절과 족관절, 슬관절과 고관절의 조합으로 분류
하여 표 5에 보였다. 표 5와 같이 슬관절의 특징점만 가지 고 분류할 경우 최저 61.10%의 정확도를 보였다. 보행과 주 기별로 슬관절에서 구분이 가능하지만 보행데이터의 경우 연속적이 시계열 데이터의 속성을 가지고 있으므로 슬관절 TP
TP FN+ --- 100×
표 4. 선정된 알고리즘을 활용한 보행데이터 분류 결과.
Table 4. Results of gait data using selected algorithm.
Classifier Factor(k) Accuracy
(%) Specificity
(%) Sensitivity
(%) Classifier Factor(k) Accuracy
(%) Specificity
(%) Sensitivity (%)
LDA - 78.42 74.29 73.52 QDA - 86.16 82.74 81.53
kNN 1 94.49 92.50 92.16 kNN 2 92.90 90.47 90.70
kNN 3 93.13 91.29 89.80 kNN 4 92.05 89.87 88.56
kNN 5 92.08 89.92 88.32 kNN 6 91.14 88.94 87.30
kNN 7 90.83 88.51 86.85 kNN 8 90.35 87.79 86.29
kNN 9 90.12 87.51 85.72 kNN 10 89.83 87.25 85.39
kNN 11 89.64 87.03 85.11 kNN 12 89.12 86.28 84.38
kNN 13 89.09 86.38 84.18 kNN 14 88.73 86.04 83.73
kNN 15 88.76 86.04 83.79 kNN 16 88.43 85.65 83.44
kNN 17 88.28 85.54 83.26 kNN 18 88.09 85.32 82.92
kNN 19 88.13 85.50 82.97 kNN 20 88.06 85.33 82.84
kNN 21 88.06 85.31 82.88 kNN 22 87.81 85.06 82.41
kNN 23 87.87 85.23 82.63 kNN 24 87.70 84.97 82.34
kNN 25 87.51 84.74 82.12 kNN 26 87.32 84.49 81.77
kNN 27 87.35 84.52 81.78 kNN 28 87.12 84.32 81.38
kNN 29 87.10 84.29 81.38
표 5. 분석결과를 적용한 관절의 부위별 모형의 정확도.
Table 5. Accuracy of the joint model by the analysis results.
Leg part LDA QDA kNN(k = 1) kNN(k = 15) kNN(k = 29)
Knee 61.10% 66.98% 80.53% 75.31% 74.58%
Knee, Ankle 74.40% 81.29% 91.75% 85.96% 84.70%
Hip, Knee 71.85% 80.64% 95.30% 86.45% 84.30%
Hip, Knee, Ankle 78.42% 86.16% 94.49% 88.76% 87.10%
그림 2. LDA 혼동행렬.
Fig. 2. Confusion matrix of LDA.
134
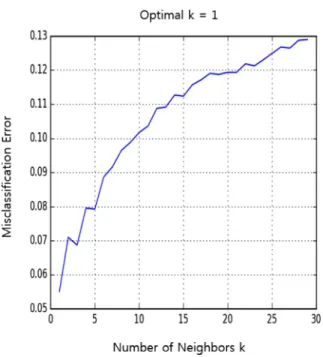
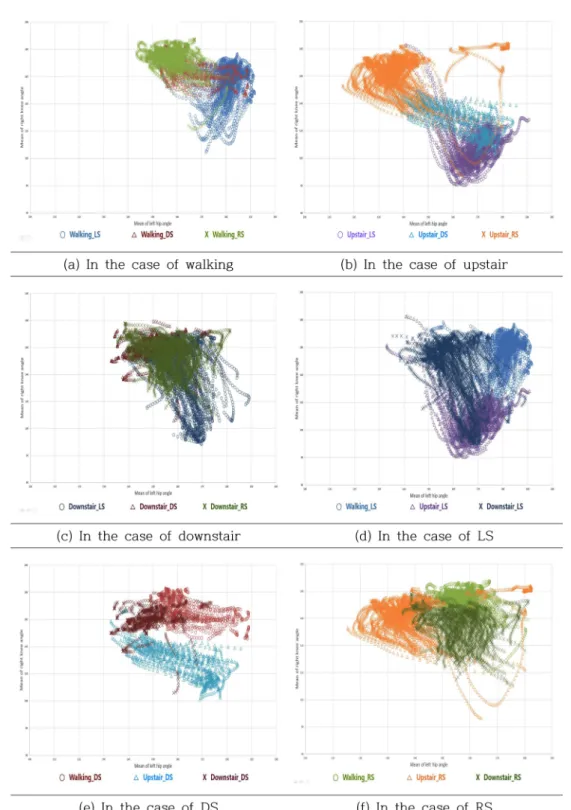
만으로 분류할 수 없음을 확인하였다. 알고리즘 검증을 위 해 확인 데이터를 사용하고 각 보행과 주기를 나눈 결과는 그림 2-4에서 LDA, QDA, kNN의 혼동행렬로 나타내었 다. kNN의 혼동행렬의 경우 가장 정확도가 높은 k가 1인 결과로 나타내었다. 그림 5에서 k의 숫자가 늘어날수록 점 점 정확도가 감소함을 보였다. 이는 각 보행과 주기에서 공 통적인 특징을 보이는 영역이 중복됨으로 인해 k가 늘어남 에 따라 정확도가 저하를 파악할 수 있다. 그림 6은 전체 데 이터중 왼쪽 고관절의 평균값, 오른쪽 슬관절의 평균값을 보 행별, 주기별 클래스로 나누어 분산형 그래프에 비교하였다.
그림 6(a-c)는 같은 보행 시 주기별 데이터의 분포를 보여 주고 그림 6(d-f)는 같은 주기 시 보행별 데이터의 분포를 보였다. x축은 왼쪽 고관절의 평균값이고 y축은 오른쪽 슬 관절의 평균값이다. 같은 보행의 경우는 데이터가 중첩되는 영역이 넓은 반면 같은 주기의 경우는 보행에 비해 중첩된 영역이 적음을 확인 할 수 있다. 이는 각 기계학습을 통해 분류한 혼동행렬의 오인식이 같은 보행에서 주로 일어나는
현상을 설명해주며 시계열 데이터의 특성상 각 주기의 경계 영역에서 오인식이 발생가능성이 높은 것으로 해석된다.
IV. 결 론
본 연구에서는 양쪽 하지를 동시에 관측하고 운동학적 데 이터만을 이용하여 동작의도를 파악하는 방법을 제안하였다.
기존의 운동역학적 요소와 운동학적 요소를 결합데이터가 아닌 운동학적 요소만을 가지고 분류했으며 mini-batch형 태를 활용하여 실시간으로 의도를 파악하였다. LDA와 QDA 의 경우 데이터 분석속도는 빠르지만 정확도가 90%미만이 며, kNN의 경우 90%이상의 정확도를 보였지만 외골격의 착용자의 운동학적 데이터를 수집하여 데이터를 구성할 경 우 지금보다 더 높은 정확도를 가질 수 있을 것으로 기대할 수 있다. 또한 본 연구에서 제시한 보행 3단계로 인해 분류 의 정확도가 저하됨을 확인하였다. 이에 대한 대안으로 Sánchez-Lacuesta가 제안한 보행주기 7단계를 적용하여 정 확도 향상을 기대할 수 있다[16]. 또한 선정한 특징점만으 로 정확한 분류가 부족하므로 향후 인식의 정확도를 높이기 위해서 기초 통계 추정치 이외에 특징점과 더불어 관절각 이외에 관절속도 및 운동 형상학적 요인을 추가하여 분류하 는 연구, 현재 다양한 산업에서 활용되고 있는 빅데이터 클 라우드 시스템을 활용하여 공간의 제한을 받지 않고 일상행 동에서의 실시간 분류하는 연구등을 진행 할 계획이다.
그림 5. k에 다른 분류오류.
Fig. 5. Misclassification error according to k.
그림 3. QDA 혼동행렬.
Fig. 3. Confusion matrix of QDA.
그림 4. kNN 혼동행렬.
Fig. 4. Confusion matrix of kNN.
135
V. 초 록
외골격 로봇은 군사, 산업 및 의료와 같은 다양한 분야에 서 사용되도록 개발된 기술이다. 외골격 로봇은 착용자의 움 직임을 감지하여 작동한다. 외골격 로봇이 착용자의 일상적 인 행동을 인지함으로써 착용자를 신속하게 보조하고 시스
템을 효율적으로 활용할 수 있다. 본 연구에서는 피실험자 로부터 얻은 운동학적 데이터를 통해 LDA, QDA, kNN을 활용하여 보행유형을 분류한다. 보행은 주로 일상생활에서 수행되는 일반보행과 계단보행을 선정하였다. 피실험자에게 7개의 IMUs 센서를 정해진 위치에 부착하여 운동학적 요 소를 측정 하였다. 결과적으로, LDA는 78.42%, QDA는 그림 6. 각 보행별, 주기별 데이터 분산형 그래프.
Fig. 6. Scatter plot by gait type and gait cycle.
136
86.16%, kNN는 k값에 따라 87.10% ~ 94.49%의 정확도 로 분류하였다.
References
[1] Zoss, Adam B., Hami Kazerooni, and Andrew Chu, “Biome- chanical design of the Berkeley lower extremity exoskeleton (BLEEX)”, IEEE/ASME Transactions On Mechatronics., vol. 11, no. 2, pp. 128-138, 2006.
[2] Bogue, Robert, “Exoskeletons and robotic prosthetics: a review of recent developments”, Industrial Robot: An Inter- national Journal., vol. 36, no. 5, pp. 421-427, 2009.
[3] Mohammed, Samer, Yacine Amirat, and Hala Rifai, “Lower- limb movement assistance through wearable robots: State of the art and challenges”, Advanced Robotics., vol. 26, no. 1-2, pp. 1-22, 2012.
[4] Yu, S. N., Lee, H. D., Lee, S. H., Kim, W. S., Han, J. S., &
Han, C. S, “Design of an under-actuated exoskeleton system for walking assist while load carrying”, Advanced Robotics., vol. 26, no. 5-6, pp. 561-580, 2012.
[5] HYUNDAI, https://www.slashgear.com/hyundai-unveils-robot- exoskeleton-that-makes-operators-very-strong-13439955/.
[6] Adams, J. A., “Critical considerations for human-robot inter- face development”, In Proceedings of 2002 AAAI Fall Sym- posium, Nov. 2002, pp. 1-8.
[7] Bueno, L., Brunetti, F., Frizera, A., & Pons, J. L., “Human- robot cognitive interaction.” Wearable Robots: Biomecha- tronic Exoskeletons., vol. 1, pp. 87-126, 2008.
[8] Lee, H., Yu, S., Lee, S., Han, J., & Han, C., “Development of
human-robot interfacing method for assistive wearable robot of the human upper extremities”, In SICE Annual Confer- ence, Aug. 2008, pp. 1755-1760.
[9] Tao, W., Liu, T., Zheng, R., & Feng, H., “Gait analysis using wearable sensors”, Sensors, vol. 12, no. 2, pp. 2255-2283, 2012.
[10] Taborri, J., Palermo, E., Rossi, S., & Cappa, P., “Gait parti- tioning methods: a systematic review”, Sensors, vol. 16, no.
1, pp. 66, 2016.
[11] Liu, Tao, Yoshio Inoue, and Kyoko Shibata., “Development of a wearable sensor system for quantitative gait analysis”, Measurement, vol. 42, no. 7, pp. 978-988, 2009.
[12] Zhang, Zhiqiang, Zhipei Huang, and Jiankang Wu., “Ambu- latory hip angle estimation using Gaussian particle filter”, Journal of Signal Processing Systems., vol. 58, no. 3, pp. 341- 357, 2010.
[13] Peng, Z., Cao, C., Liu, Q., & Pan, W., “Human walking pat- tern recognition based on KPCA and SVM with ground reflex pressure signal”, Mathematical Problems in Engineer- ing, 2013.
[14] Nordin, Margareta, and Victor Hirsch Frankel, eds., Basic biomechanics of the musculoskeletal system, Lippincott Wil- liams & Wilkins, 2001.
[15] Izenman, Alan Julian. “Modern multivariate statistical tech- niques. Regression, classification and manifold learning”, Springer, 2008.
[16] Sánchez-Lacuesta, J., J. Prat, J. V. Hoyos, E. Viosca, C.
Soler-Garca, M. Comin, R. Lafuente, A. Cortés, and P. Vera,
“Biomecánica de la marcha humana normal”, Valencia: Gen- eralitat Valenciana, pp. 19-112, 1993.