관련 문서
The significance of this study is that a robot programming language has been developed that addresses the concepts of both procedure and reactivity in such
웹 표준을 지원하는 플랫폼에서 큰 수정없이 실행 가능함 패키징을 통해 다양한 기기를 위한 앱을 작성할 수 있음 네이티브 앱과
_____ culture appears to be attractive (도시의) to the
The index is calculated with the latest 5-year auction data of 400 selected Classic, Modern, and Contemporary Chinese painting artists from major auction houses..
A frame size error in a frame that could alter the state of the entire connection MUST be treated as a connection error (Section 5.4.1); this includes any frame carrying a
1 John Owen, Justification by Faith Alone, in The Works of John Owen, ed. John Bolt, trans. Scott Clark, "Do This and Live: Christ's Active Obedience as the
This study is based on the fact that demand for housing has been under the influence of change of population structure... people live in
Injury is a burden on athletes, but the rehabilitation exercise of this study suggests that the improvement of knee muscle function and knee function
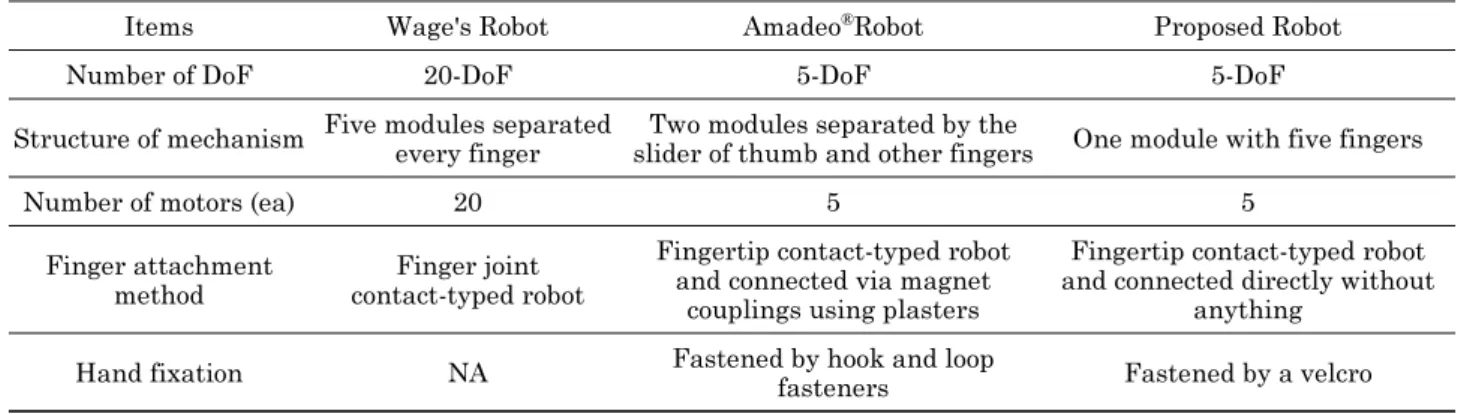
![Fig. 11 shows wage’s hand robot [7], Amadeo ® hand robot [11], and the proposed robot in this paper respec-tively.](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5335197.392406/6.892.458.801.136.651/shows-robot-amadeo-robot-proposed-robot-respec-tively.webp)