논문 2014-51-10-23
도킹 포메이션을 이용한 차량형 이동 로봇의 자율 주차
( Autonomous Parking of Car-Like Mobile Robot Using Docking Formation )
권 지 욱*, 김 진 효**, 서 지 원**** ( Ji-Wook Kwon, Jin Hyo Kim, and Jiwon Seoⓒ)
요 약
본 논문은 무인 자동차의 자율주차 알고리즘 개발을 위하여 이 문제를 차량형 이동로봇의 위치-자세 안정화 (posture regulation) 문제로 치환하고 이렇게 치환된 문제를 해결할 수 있는 차량형 이동로봇을 위한 도킹 포메이션과 궤환선형화 제어 기법을 제안한다. 경로생성 기법과 최적화 기법을 기반으로 하는 기존의 연구결과들에 비해, 본 논문에서 제안하는 자율주차 알고리즘은 자율주차 문제를 도킹 포메이션 기반의 위치-자세 안정화 문제로 치환하고 입력제한을 고려할 수 있는 궤환선형화 제어기법을 적용함으로써 적은 연산량과 낮은 성능의 프로세서만으로도 무인 자동차의 자율 주차가 가능하도록 한다. 본 논문 에서 제안된 차량형 이동로봇의 도킹 포메이션과 궤환선형화 제어기법의 유효성은 안정성 해석을 통하여 보이고, 본 논문에서 제안하는 자율주차 알고리즘의 성능은 모의실험 및 실제 로봇을 통한 실험결과를 통하여 검증한다.
Abstract
For a autonomous parking of unmanned car, this paper proposes a posture regulation algorithm of a car-like mobile robot, which is supported by a docking formation and a feedback linearization control law. Unlike the previous researches based on a path-planning and optimization algorithms, the autonomous car implemented the proposed autonomous parking algorithm can be parked without much computational burden and a high performance processor. Stability of the proposed docking formation and feedback linearization control law are analyzed and performance of the proposed algorithm is shown by implementing to the simulations with six scenarios and an actual car in the experiment place.
Keywords : Unmanned car, autonomous parking, posture regulation, docking formation, feedback linearization
* 정회원, 연세대학교 글로벌융합기술원
(Yonsei Institute of Convergence Technology)
** 학생회원, *** 정회원, 연세대학교 글로벌융합공학부, 연세대학교 글로벌융합기술원
(School of Integrated Technology, Yonsei University, Yonsei Institute of Convergence Technology)
ⓒ Corresponding Author(E-mail: [email protected])
※ 본 연구는 미래창조과학부 및 정보통신산업진흥원의
IT명품인재양성사업의 연구결과로 수행되었으며
(NIPA-2014-H0201-14-1002), 2014년도 정부(미래창 조과학부)의 재원으로 한국연구재단의 지원을 받아 수 행된 기초연구사업임(NRF-2013R1A1A1012038).
접수일자: 2014년08월19일, 수정일자: 2014년09월29일 게재확정: 2014년10월01일
Ⅰ. 서 론
이동수단의 무인화 추세에 따라 자동차의 무인화 연 구들이 다양하게 진행되고 있다. 특히, 구글의 무인 자 동차의 상용화가 눈앞에 다가오면서 관련된 연구들의 양과 질이 많은 성장을 거두었다. 이러한 무인 자동차 는 장애인이 스스로 차량을 이용하여 이동할 수 있도록 할 뿐만 아니라 기존 운전자들을 이동 중에 운전에서 자유롭게 함으로써 다양한 활동이 가능하도록 할 것으 로 기대되고 있다. 또한, 완전 무인화에 앞서 그 요소
기술을 운전자 보조 시스템 (advanced driver assistance system, ADAS)에 적용함으로써 운행 중 차 량 및 보행자의 안전을 향상시키고 운전자의 편의를 도 모할 수 있는 기술 개발이 계속되고 있으며, 그 결과들 은 최근 자동차 업계에서 도입하여 상용차에 장착하는 사례가 늘고 있다[1, 2]. 특히, 무인 자동차 의 자율주차 시스템은 ADAS 와 차량 무인화의 좋은 적용사례 (application)로서 인식되어 왔다. 또한, 자율 주차는 사 용자에 대한 서비스 관점에서 자동차 업계나 운전자 모 두에게 관심의 대상이 되었으며, 따라서 최근 몇몇 상 용차에 도입되어왔다[3~4].
자율주차 알고리즘에 대한 연구는 비홀로노믹 제약 (nonholonomic constraint)을 가지는 아커만 (Ackelmann) 구조 또는 자전거(Bicycle) 구조의 이동로 봇 제어와 유사한 문제로서 연구되어왔다[5~8]. 주차방식 에 따라 크게 직각주차 (Garage Parking)과 평행주차 (Parallel Parking)의 두 범주로 나뉘어 연구되어 왔다.
먼저, [5]에서 n차 다항식을 이용하여 주차를 위한 주행 경로를 생성하고 이를 추종하도록 하였으나 [5]에서 나 타난 일부 상황(또는 초기조건)에 대해서만 적용 가능 하여 다양한 초기조건에 대응하지 못한다. 또한, 최적화 기법을 기반으로 하는 차량의 자율주차 알고리즘이 개 발되었으나[6~7], 이 기법을 구현하기 위해서는 높은 연 산부하를 감당할 수 있는 고사양의 프로세서가 바탕이 되어야 하고, 이는 비용증가로 연결된다. [8]에서는 장 애물의 위치와 차량의 최대 조향각을 이용하여 연산이 단순하고, 다양한 주차환경에서의 주행경로를 생성하여 추종하도록 하였으나 조향각의 변화가 크기 때문에 차 량의 이동 부하가 매우 크다.
따라서, 차량의 자율주차 알고리즘이 실제 환경에 잘 적용되기 위해서는 다음의 기여(Contribution)들을 가져 야 한다.
z 연산량이 적다.
z 다양한 초기조건에서 적용이 가능하다.
z 이동부하가 적다.
본 논문에서는 위의 조건을 만족하기 위하여 도킹- 포메이션을 이용한 비홀로노믹 제약조건을 가지는 차량 형 이동로봇의 자율주차 알고리즘을 제안한다. 도킹-포 메이션은 [9]에서 제안되어 비홀로노믹 제약조건을 가
지는 두빈(Dubin) 모델 이동로봇의 정지 및 이동 플랫 폼으로의 도킹 시스템 모두에 적용가능 한 알고리즘으 로 제안되었다. 여기서, 도킹-포메이션을 이용한 이동로 봇의 도킹 알고리즘은 위치-자세 안정화와 트랙킹 (tracking) 문제를 동시에 풀 수 있는 알고리즘임을 알 수 있다. 차량형 이동로봇의 자율주차 문제는 아커만 구조 이동로봇의 위치-자세 안정화 문제와 유사하고 이 는 브라켓 정리에 의하여 하나의 시연속 제어기를 설계 하는 것은 불가능하기 때문에 쉽지 않은 문제이다[10]. 본 논문에서는 자율주차 문제를 도킹-포메이션을 도입 함으로서 해결할 뿐만 아니라, 앞서 언급한 적은 연산 량, 다양한 초기조건에서의 높은 적용 가능성, 적은 이 동부하의 장점들을 제공한다.
본 논문은 다음과 같이 구성되어 있다. 먼저 II 장에 서 본 논문에서 무인 자동차의 자율주차 문제를 차량형 이동로봇의 위치-자세 안정화 문제로 재 정의하고 도킹 포메이션에 대하여 설명한 후, III 장에서 도킹 포메이 션을 구현하기 위한 궤환선형화 제어 기법은 제안한다.
IV 장에서는 제안한 자율주차 알고리즘의 안정성과 성 능을 파악하고 실제 로봇에 적용되었을 때의 유효성을 판단하기 위하여 모의실험과 실제로봇에 대한 적용실험 결과를 기술하고, 마지막으로 V장에서 결론짓는다.
Ⅱ. 문제 정의 및 배경 지식
1. 문제 정의
본 논문에서는 다음과 같은 차량형 이동로봇의 기구 학 구조를 가정한다[11].
, ,
(1)
여기서, 는 이동로봇의 위치, 는 자세각, 은 앞 뒤 바퀴 간 거리, 는 조향각, 와 는 각각 직진속도와 회 전속도이다. (1)에서 차량형 이동로봇의 제어입력은 와
이고, 이때, 본 논문에서는 이동로봇의 동적제어기 (Dynamic Controller)에 의하여 설계된 모션제어입력이 충분히 구현 가능함을 가정한다. 그림 1과 2에서 볼 수 있듯이, 그림 1의 무인 자동차의 자율 주차 문제는 그림 2의 아커만 구조를 가지는 차량형 이동로봇의 위치-자세 안정화 문제로 치환 가능하다. 즉, 그림 1에서와 같이 무 인 자동차는 주차지점으로 이동할 때 주어진 점근 방향
그림 1. 무인 자동차의 자율주차 문제
Fig. 1. Autonomous parking of autonomous car.
그림 2. 차량형 이동로봇의 posture regulation Fig. 2. Posture regulation of car-like mobile robot.
을 유지해야 하는데, 그림 1에서에서와 같이 무인 자동차 는 초기위치, 에서 출발하여 진입각, 를 유 지하면서 주차지점, 로 이동해야 하는 것과 같다.
본 논문에서는 이러한 주차 문제를 그림 2의 차량형 이동 로봇의 위치-자세 안정화 문제로 치환함으로써 서론에서 언급한 장점들을 획득한다.
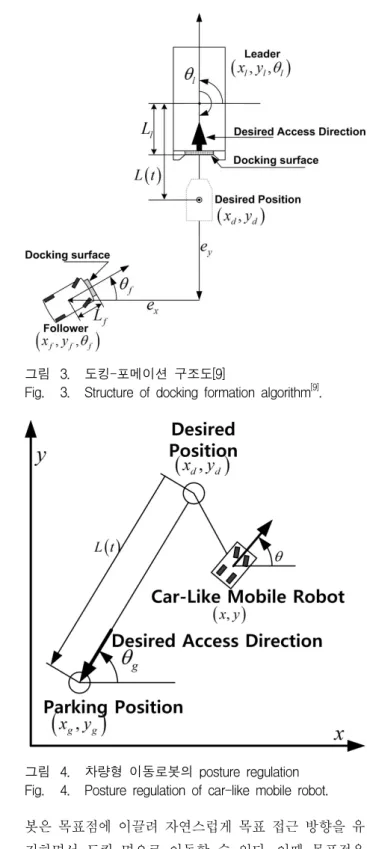
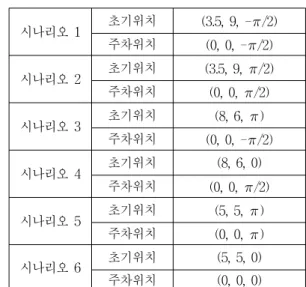
2. 도킹-포메이션
도킹-포메이션은 [9]에서 제안된 정지 또는 이동하는 스테이션에 모두 적용될 수 있는 도킹 알고리즘으로 제 안되었다. 그림 3에서와 같이, 도킹 스테이션을 leader 로 이동로봇을 follower로 가정하고 도킹 면 (docking surface)을 기준으로 하는 군집대형을 형성한다. 이동로 봇은 도킹 면을 향하여 이동하지 않고 목표점(desired position)을 향해 이동하도록 하고, 목표점은 초기위치,
에서 로 이동한다. 이러한 과정을 통하여 이동로
그림 3. 도킹-포메이션 구조도[9]
Fig. 3. Structure of docking formation algorithm[9].
그림 4. 차량형 이동로봇의 posture regulation Fig. 4. Posture regulation of car-like mobile robot.
봇은 목표점에 이끌려 자연스럽게 목표 접근 방향을 유 지하면서 도킹 면으로 이동할 수 있다. 이때 목표점은 다음과 같이 설정한다.
sincos (2)여기서, 는 주차지점에서 진입방향을 거슬러 이동한
지점까지의 거리이고 목표위치를 따라 이동하는 로봇이 주차지점으로 이동할 있도록 하기위하여 는 초기값
에서 으로 시간에 따라 변화하는 함수이다.
[9]에서 제안한 도킹-포메이션을 차량형 이동로봇의 위치-자세 안정화 문제에 적용하기 위하여 주차지점, 목표위치, 이동로봇간의 관계를 그림 4에와 같이 설정 한다. 그림 4에서 나타난 것과 같이 이동로봇이 초기위 치, 에서 출발하여 목표점, 을 추종하 면서 진입각(desired access direction), 를 유지하고 주차지점(parking position), 로 이동하도록 한다.
그림 4를 바탕으로 식 (2)을 재설정하면 다음과 같이 표현 가능하다.
sincos (3) 여기서 (3)의 시간미분은 다음과 같이 나타난다.
(4)
Ⅲ. 도킹 포메이션 추종을 위한 궤환선형화
도킹 포메이션을 위치-자세 안정화 알고리즘에 적용 하기 위해서는 이동로봇이 목표점을 추종하여야 한다.
본 장에서는 이러한 제어목적을 달성할 수 있도록 하는 [12]에서 제안된 궤환선형화 (feedback linearization) 알 고리즘을 사용하여 이동로봇의 모션제어 알고리즘을 제 안하다. 본 논문에서 제안하는 모션제어 알고리즘은 [12]에서 두빈 모델 기반의 로봇을 대상으로 하여 제안 된 궤환선형화 알고리즘을 바탕으로 하며, 본 논문에서 는 이를 차량형 이동로봇을 위한 알고리즘으로 재설계 하여 이동로봇에 적용한다.
본 논문의 제어목적 (i.e., x→xd, y→yd)을 달성하기 위하여 다음과 같이 위치 오차 변수를 설정한다.
, . (5)
여기서 각 오차변수의 시간미분은 다음과 같다.
(6)
이를 통하여 앞서 언급한 제어목적, x→xd, y→yd은 와
를 0으로 수렴시키기 문제로 바꾸어 나타낼 수 있다.
이렇게 생성된 제어입력 와 는 다음과 같다.
(7a)
(7b)
위 제어입력에서
tanh
tanh
tanh
이고, 여기서 , >0 상수이다. 또한 목표 자세각과 자세각 오차는 다음과 같이 정의한다.
(8a)
(8b)
이렇게 생성된 제어입력은 다음의 정리 1에 의해 유도될 수 있다.
정리 1: (1)의 차량형 이동로봇의 기구학 모델과 그림 2의 제어목적을 고려하였을 때 (7)에서 제안된 제어입력 을 적용하면 (5)의 오차변수들은 0으로 수렴한다.
증명: 만약 (5)와 (6)로부터
, =Y (7)
와 같은 형태를 얻는다면 , (6)은 다음과 같이 나타낼 수 있다.
tanh, (8 a)
tanh (8 b)
식 (8)에서 와 는 모두 시간이 지남에 따라 0으 로 수렴함을 알 수 있다[9, 12].
이때 (8 a)에와 (8 b)에 각각 cos와 sin를 곱 하여 더하면 (7a)의 직진속도를 얻을 수 있다. 또한, [8]
과 [11]에서 언급된 것과 같이 (7 a)의 직진속도가 유효 하기 위해서는 이동로봇이 목표지점을 향해있어야 하기
때문에 목표 자세각을 (7 a)와 같이 선택한다.
이동로봇이 목표 자세각을 추종하도록 하기위해
가 0이 되도록 하여야 한다. (6b)의 시간미분은 다음과 같다.
tan (9)
만약 tan= tanh라면, (9)는
tanh (10)
가 되어 0으로 수렴함을 알 수 있다11-12]. (9)와 (10)으로 부터 우리는 다음과 같이 를 얻을 수 있다.
tan
따라서, (7)에서 제안된 제어입력을 차량형 이동로봇에 적용함으로써 로봇의 위치오차가 각각 0으로 수렴하여 목표위치 로 수렴할 수 있음을 알 수 있다. □
Ⅳ. 모의실험 및 실험 결과
1. 모의실험 결과
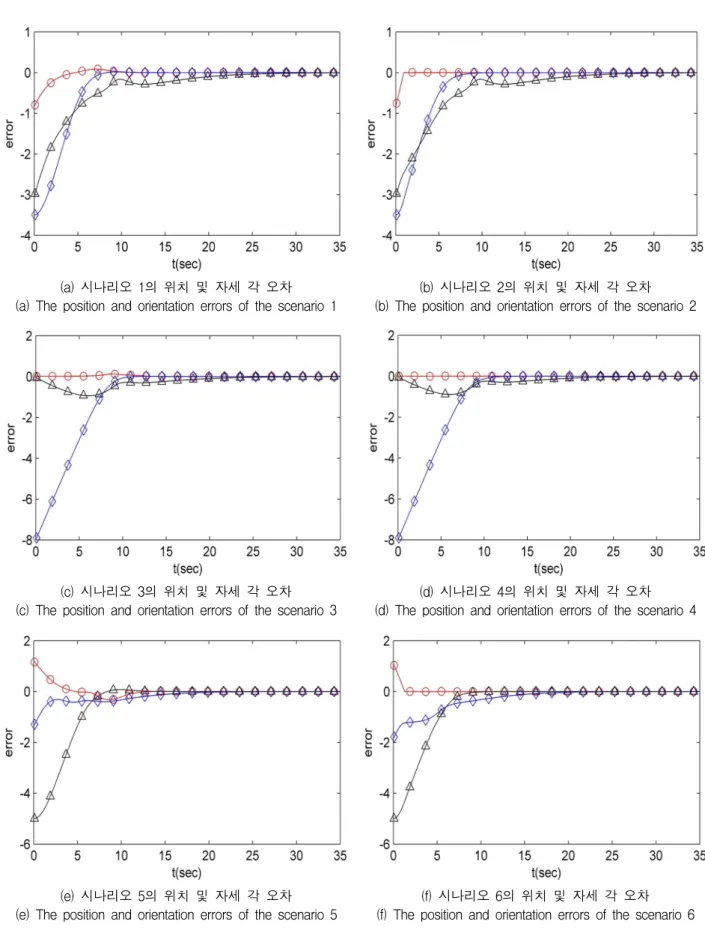
본 논문의 성능을 보이기 위하여 본 장에서는 6개의 시나리오를 이용하여 모의실험을 수행하고 그 결과를 확인한다. 본 논문의 시나리오들을 위하여 도킹 포메이 션의 L(t)는 다음과 같이 설정한다.
L(t)= -3tanh((t-7)/9) + 3
또한, 각 시나리오별 주차위치와 이동로봇의 초기위치 들을 표 1에 나타낸다. 표 1에 나타난 초기위치와 주차 위치를 가지는 시나리오에 적용된 차량형 이동로봇에 본 논문에서 제안하는 도킹 포메이션 기반의 위치-자세 안정화 알고리즘을 적용하였을 때 이동경로는 그림 5에 나타나 있다. 그림 5에서 나타난 각 시나리오별 이동로 봇의 주차 경로로 부터 이동로봇의 초기위치에 관계없 이 차량형 이동로봇의 위치-자세 안정화 알고리즘을 이 용하여 자율 주차가 가능함을 알 수 있다. 본 논문에서 제안하는 도킹 포메이션 기반의 위치-자세 안정화 알고 리즘의 안정성과 성능을 판별하기 위하여 그림 6에서 각 시나리오에 대한 위치 오차들을 나타낸다. 그림 6에 는 각 시나리오별 ex, ey, eθ 가 포함되어 있고 이를 통 하여 모든 위치 및 자세각 오차가 시간이 흐름에 따라
시나리오 1 초기위치 (3.5, 9, -/2) 주차위치 (0, 0, -/2) 시나리오 2 초기위치 (3.5, 9, /2) 주차위치 (0, 0, /2) 시나리오 3 초기위치 (8, 6, )
주차위치 (0, 0, -/2) 시나리오 4 초기위치 (8, 6, 0)
주차위치 (0, 0, /2) 시나리오 5 초기위치 (5, 5, )
주차위치 (0, 0, ) 시나리오 6 초기위치 (5, 5, 0)
주차위치 (0, 0, 0)
표 1. 각 시나리오별 이동로봇의 초기위치 및 주차위
치 (m, m, rad)
Table 1. The initial position and parking position of car-like mobile robot of each scenario.
0으로 수렴함을 알 수 있다. 그림 5와 6의 모의실험 결 과를 통하여, 무인 자동차의 자율 주차를 위하여 도킹 포메이션 기반의 차량형 이동로봇의 위치-자세 안정화 알고리즘을 적용하였을 때 안정성을 보장하고 충분히 주차 지점에 주차가 가능함을 확인할 수 있다.
2. 실험 결과
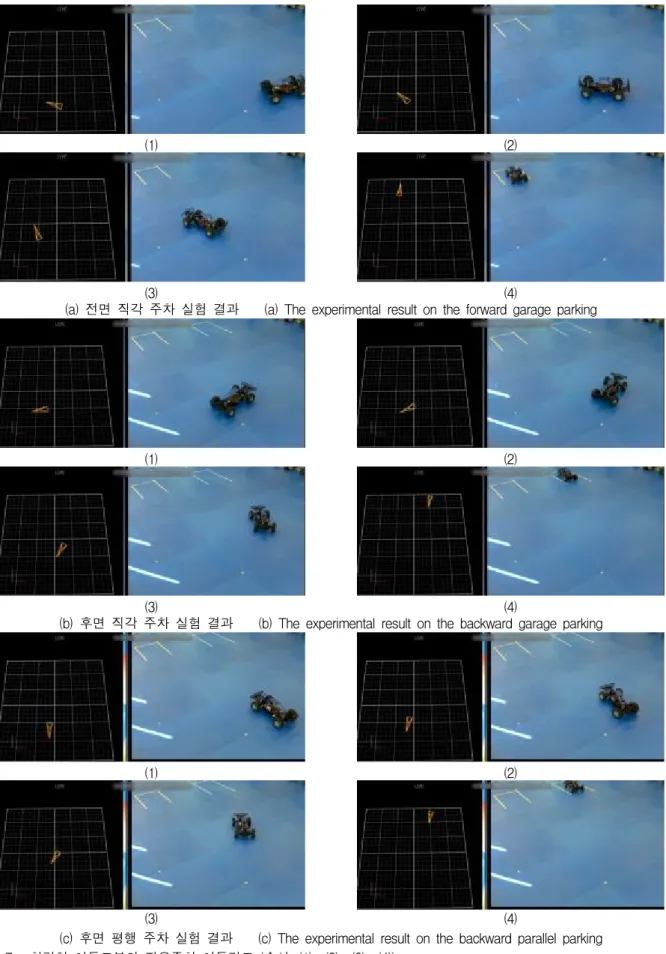
본 장은 도킹 포메이션 기반의 위치-자세 안정화 알 고리즘이 실제 차량형 이동 로봇에 적용되었을 때 유효 성과 성능을 검증하기 위하여 실제 로봇에 적용한 결과 를 나타낸다. 실험을 위하여 그림 7에 나타난 것과 같 이 차량형 이동로봇에 제안하는 도킹 포메이션 기반의 주차 알고리즘을 적용하였으며, 로봇의 이동을 분석하 기 위하여 동작분석시스템 (Vicon 사)을 이용하였다.
그림 7에서 각 그림의 왼쪽에 위치한 그림이 동작분석 시스템을 통해 본 이동로봇의 위치이고 오른쪽 그림이 실제 로봇이다. 그림 7에서 볼 수 있듯이 본 논문에서 제안하는 도킹 포메이션 기반의 자율 주차 알고리즘이 실제 로봇에 적용되었을 때에 로봇은 초기위치에 관계 없이 원하는 진입각을 유지하면서 주차지점으로 이동함 을 확인하였다.
(a) 시나리오 1 주행 경로
(a) The route of the scenario 1 (b) 시나리오 2 주행 경로 (b) The route of the scenario 2
(c) 시나리오 3 주행 경로
(c) The route of the scenario 3 (d) 시나리오 4 주행 경로 (d) The route of the scenario 4
(e) 시나리오 5 주행 경로
(e) The route of the scenario 5 (f) 시나리오 6 주행 경로 (f) The route of the scenario 6 그림 5. 차량형 이동로봇의 자율주차 이동경로
Fig. 5. The routes of the car-like mobile robots in autonomous parking.
(a) 시나리오 1의 위치 및 자세 각 오차 (a) The position and orientation errors of the scenario 1
(b) 시나리오 2의 위치 및 자세 각 오차 (b) The position and orientation errors of the scenario 2
(c) 시나리오 3의 위치 및 자세 각 오차 (c) The position and orientation errors of the scenario 3
(d) 시나리오 4의 위치 및 자세 각 오차 (d) The position and orientation errors of the scenario 4
(e) 시나리오 5의 위치 및 자세 각 오차 (e) The position and orientation errors of the scenario 5
(f) 시나리오 6의 위치 및 자세 각 오차 (f) The position and orientation errors of the scenario 6 그림 6. 자율주차 중 차량형 이동로봇의 위치 및 자세 각 오차(◇: ex (m), △: ey (m), ○: eθ (rad) )
Fig. 6. The position and the orientation errors of the car-like mobile robots in autonomous parking.
(1) (2)
(3) (4)
(a) 전면 직각 주차 실험 결과 (a) The experimental result on the forward garage parking
(1) (2)
(3) (4)
(b) 후면 직각 주차 실험 결과 (b) The experimental result on the backward garage parking
(1) (2)
(3) (4)
(c) 후면 평행 주차 실험 결과 (c) The experimental result on the backward parallel parking 그림 7. 차량형 이동로봇의 자율주차 이동경로 (순서: (1)→(2)→(3)→(4))
Fig. 7. The routes of the car-like mobile robots in autonomous parking ((1)→(2)→(3)→(4)).
V. 결 론
본 논문은 무인 자동차의 자율 주차 문제를 차량형 이동로봇의 위치-자세 안정화 문제로 치환하고 이를 도 킹 포메이션과 궤환선형화 제어 알고리즘을 이용하여 해결하였다. 본 논문에서 제안하는 도킹 포메이션 기반 의 자율 주차 알고리즘을 자율 주차 문제에 적용하였을 때 기존의 경로 생성 알고리즘 기반의 주차 알고리즘에 비하여 많은 연산량과 그에 따를 고성능의 프로세서에 대한 고비용을 줄일 수 있다. 제안하는 주차 알고리즘 의 안정성과 성능을 확인하기 위하여 6가지 시나리오의 모의실험들과 3가지 시나리오의 실제 실험을 수행하였 고 이를 통하여 제안하는 알고리즘의 유효성을 검증하 였다.
REFERENCES
[1] H. P. Sun, “A Study on the automotive ADAS market diffusion factors,” The Korean Institute of Cummunications and Information Sciences Summer Conference, pp. 942-945, 2009.
[2] S. Y. Park, Y. S. Song, and H. J. Kim, “Visual landmark based parking assistance system in constrained environment,” Journal of the Institute of Electronics and Information Engineers SP, vol.
49, no. 1, pp. 31-40, 2012.
[3] C. K. Choi, “Intelligent parking assist technology,” The Korean Society of Automotive Engineers 2013 ITS Workshop, pp. 223-241, 2013.
[4] B. Y. Lee “Development of BMW automatic parking system,” Journal of the KSME, vol. 43, no. 5, pp. 27-27, 2003.
[5] T.-H. S. Li and S.-J. Chang, “Autonomous fuzzy parking control of a car-like mobile robot”, IEEE Trans. on Syst., Man, and Cybern.-Part A: Systems and Humans, vol. 33, no. 4, pp. 451-465, Jul. 2003.
[6] X. Xiong and B.-J. Choi, “Design of genetic algorithm-based parking system for a autonomous vehicle”, International Journal of Fuzzy Logic and Intelligent Systems, vol. 9, no.
4, pp. 275-280, Dec. 2009
[7] G. Lini, A. Piazzi, and L. Consolini, “Multi- optimization of η3-splines for autonomous parking”, Proc. of CDC-ECC, FL, USA, Dec,
2011.
[8] K. Min, J. Choi, H. Kim, and H. Myung,
“Design and implementation of path generation algorithm for controlling autonomous driving and parking”, ICCAS, Jeju, Korea, Oct. 2012.
[9] J.-W. Kwon and J. Seo, “Docking control on both stationary and moving stations based on docking formation”, IET Electronics Letters, vol.
50, no. 6, pp. 426-438, Mar. 2014.
[10] R. W. Brockett, “Asymptotic stability and feedback stabilization,” in Differential Geometric Control Theory, pp. 181-191, 1983.
[11] A. De Luca, G. Oriolo, and C. Samson,
“Feedback control of a nonholonomic car-like robot,” in Robot motion planning and control, ed:
Springer, pp. 171-253, 1998.
[12] D. Chwa ‘Tracking control of differential-drive wheeled mobile robots using a backstepping-like feedback linearization’, IEEE Trans. Syst. Man Cybern., Part A, vol. 40, no. 6, pp. 1285–1295 [13] H. K. Khalil, Nonlinearsystems, 3rd ed.,
PrenticeHall, 2001.
저 자 소 개 권 지 욱(정회원)
2005년 아주대학교 전자공학부 학사 졸업
2007년 아주대학교 전자공학과 석사 졸업
2012년 아주대학교 전자공학과 박사 졸업
2013년~현재 연세대학교 글로벌융합기술원 책임연구원
<주관심분야 : 비선형 강인제어, 이동로봇 및 무 인항공기 모션 제어, 다개체 시스템의 군집제어>
김 진 효(학생회원)
2009년 연세대학교 전기전자공학부 학사 졸업
2009년~2011년 LG Display 연구원 2011년~현재 연세대학교 글로벌 융합공학부 석박사통합과정
<주관심분야 : 무인 시스템, 지능형 협업 시스템, 센서 융합>
서 지 원(정회원)
2002년 KAIST 기계공학과 항공 우주공학전공 학사 졸업 2004년 Stanford University 항공 우주공학과 석사 졸업 2008년 Stanford University 전기 공학과 석사 졸업
2010년 Stanford University 항공우주공학과 박사 졸업
2010년~2012년 Stanford University 박사후 연구원
2012년~현재 연세대학교 글로벌융합공학부 조교수
<주관심분야 : 항법시스템, 지능형 무인시스템>