154
JOURNAL OF KOREAN FOREST SOCIETY
반궤도식 산림작업차 개발 (I)
− 설계 및 제작 −
김재환1·박상준2
*
1경북대학교 대학원 임학과, 2경북대학교 농업생명과학대학 임학과
Development of the Semi-Crawler Type Mini-Forwarder
− Design and Manufacture −
Jae-Hwan Kim
1and Sang-Jun Park
2*
1
Department of Forestry, Graduate School, Kyungpook National University, Daegu 702-701, Korea
2
Department of Forestry, College of Agriculture & Life Sciences, Kyungpook National University, Daegu 702-701, Korea
요 약: 본 연구는 우리나라 험준한 급경사 지형의 단목중심의 목재생산시스템 등에 적합하고 사방사업 , 임도사업 등의 다양한 산림작업에 유용하게 활용할 수 있는 다목적의 반궤도식 산림작업차 개발을 목적으로 실시하였다 . 산
림작업차량의 기본 차체는 최소회전반경 설계기준과 작업도 폭을 고려하여 차체프레임부의 총길이는 5,750 mm, 차
체의 폭은 1,900 mm, 적재부의 적재용량은 약 2.5 m
3으로 설계·제작하였다 . 동력원은 3,400 rpm 의 최대 96 마력 출
력의 엔진을 선정하였으며 , 유압펌프는 2 개의 주펌프와 2 개의 보조펌프로 나누어 선정하고 , 주펌프는 전후좌우 4 개 의 주행용 유압모터에 사용하고 , 보조펌프는 각종 작업기에 사용하도록 설계·제작하였다 . 동력전달방식은 HST(Hydro-
Static Transmission) 시스템을 적용하였고 , 주행부는 조향가능한 전방 고무바퀴와 무한 궤도형으로 회전하는 후방 크
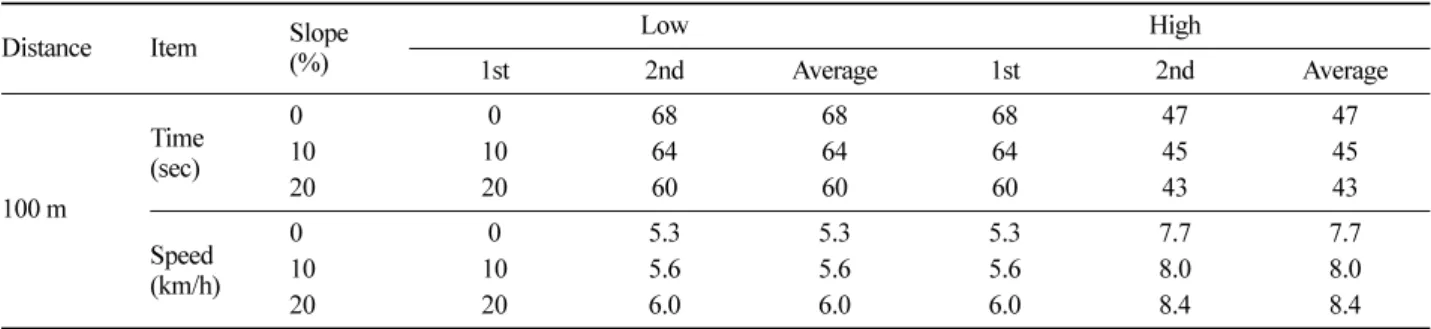
롤러로 설계·제작하고 , 조향방식은 애커만 조향방식을 채택하였다 . 주행조작부는 일반 자동차의 운전 및 운전석 형 태로 설계 제작하였으며 , 보조장치로 윈치와 로그그래플 및 아웃트리거를 장착하였다 . 시작기의 공차시 임도의 주행 속도는 저속 5.3 km/hr, 고속 7.7 km/hr 로 나타났다 .
Abstract:
This study was conducted to develop the semi-crawler type mini-forwarder that can be operated comfortable small-scale logging operation in the steep terrain and also used at a variety of operations such as the civil work in erosion control and forest-road. Considering the minimum turning radius and the width of forest operation road, the total length, width and loading capacity of the semi-crawler type mini-forwarder is 5,750 mm, 1,900 mm and 2.5 m
3, respectively. The maximum engine power is 96ps at 3600 rpm. Selected hydraulic pumps are consists of two main pumps and two sub-main pumps. Main hydraulic pumps are utilized to running motor of the front wheel and rear crawler. Sub-main pumps are utilized to the actuation parts such as steering, crane, out-rigger and dump cylinder. The transmission was adapted as the HST (Hydro-Static Transmission) system. The driving parts are designed and manufactured as the front wheel type and the rear crawler type. The steering type was manufactured as the ackerman type. Driving control parts type was designed and manufactured as driver's seat type of normal cars. It is also attached on auxiliary equipments such as winch, log grapple and out-rigger. The traveling speed of the semi-crawler type mini-forwarder in forest road was 5.3 km/hr to 7.7 km/hr.
Key words :
mini-forwarder, semi-crawler type, log transportation, forest operation
서 론
우리나라는
1998
년부터산림정책의 기조를나무를심 는정책에서가꾸는정책으로전환하여산림을경제적으로가치있는자원으로육성함은물론
‘
저탄소녹생성장’
의정책기조에발맞춰산림의생태환경적인건전성을유 지하면서산림이갖는경제·사회·환경적인다양한기 능들이조화롭게발현될수있도록기술적·생태적인숲
가꾸기사업을활발히추진하고있다
(
산림청, 2009a).
산림작업은
1
차산업중에서도작업환경이열악한대표 적인3D
산업으로젊은노동력의확보가어려운실정으본 연구는 농림부 농림기술개발사업의 지원에 의해 수행되었음 .
*Corresponding author
E-mail: [email protected]
로
,
노동력의부족과고령화에대응하고또한작업의안전 성및노동생산성향상과생산비용의절감등을위해서는 임업기계화가시급한실정이다.
그러나임업기계의보급과 도입에는많은비용이요구되므로임업기계의보급과도입 에따른경제적·산업적비용을감안하고,
또임업의활성 화를위한방안으로서임업기계화가필요하다(
산림청, 2006).
1990
년이후에임업기계화의중요성이대두되어다양한국내외의임업기계가도입되기시작하였으나
,
우리나 라지형에다소적합하지않은외국임업기계등이도입 되었으며,
이로인한외화의낭비와사용법의미보급과고장등에따른
A/S
문제등이발생하고있다.
따라서우리나라실정에 적합한임업기계의 연구및개발이시급히 필요한실정이다
(
박상준, 2008b; 2009).
한편
,
우리나라에 보급된 임업기계는2009
년 기준11,129
대로대부분체인톱및수라와같은소형기계가차지하고있으며
,
그중임내에서소운반을주목적으로하는 임내차(
미니포워더)
는17
대로절대적으로부족한실정이다
.
현재산림작업에서의소운반작업은대부분불법개조·
개량한트럭(
영운기)
을이용하여수행되고있으므로이로인한과도한작업로개설과그에따른임지훼손
,
작업자 의안전성문제등이크게우려되고있으므로작업도및 임도주행용목재소운재용임내차의연구및개발과보급이시급히요구되고있다
(
산림청, 2009b;
이근태와박상준
, 2001; 2002; 2003).
우리나라에서의임업기계에관한연구·개발은트랙터 부착타워집재기
(HAM-200)(
임업기계훈련원, 1997),
트랙터부착형윈치
(Farmi
윈치)
및유선리모콘윈치의개발(
산림청
, 1999),
타워야더및썰매형2
드럼윈치와휴대용1
드럼무선리모콘소형윈치의개발
(
국립산림과학원, 1999),
춘 천집재기와북부집재기,
시용집재기등의가선계집재기(
산림청, 1999; 2006; 2009a),
굴삭기를이용한타워집재기 및원목집게톱(
박상준, 2002),
굴삭기를이용한조재기개 발(
국립산림과학원, 2003),
트랙터부착타워집재기(
박상준,
2008a)
등우리나라급경사지형을고려한가선계임업기계가많이연구·개발되었다
.
또한,
산림작업차에대한연 구로서는원목운반용미니포워더의연구·개발(
국립산림과학원
, 2001)
과궤도식소형임내작업차(
미니포워더)
의개발
(
국립산림과학원, 2006)
등이있다.
이와같이우리나라의실정에적합한임업기계들이다양하게연구·개발되어 왔으나
,
특히급경사지역의소운재작업에적합한반궤도식 산림작업차의연구·개발은아직까지수행되지않고있다.
한편
,
우리나라와지황및임황이다소비슷한일본의임업기계화현황을살펴보면
, 2009
년도의고성능임업기계보급대수가
3,802
대로서하베스터및프로세서등의벌목및조재기계의보급이
52.2%
를차지하고있으며,
임내작업차(
포워더)
의보급이990
대로서29.1%
를차지하고있고,
임도망과고성능임업기계를조합시킨고효율·저비용의임 목수확작업시스템을 도입하고있다
(
박상준, 2008b; 2009;
(
사)
한국목재재활용협회, 2010;
일본임업기계화협회, 2010).
본연구의목적은우리나라임업의발전과임업기계화 를촉진시키기위한방안으로서우리나라의험준한급경 사지지형과단목중심의목재생산작업시스템
,
급경사지의 임도및작업도등의목재운반작업에적합하고,
사방사업및임도사업등의산림토목사업의자재운반등다양한산 림작업에도유용하게활용할수있는반궤도식다목적산 림작업차를개발하는것이다
.
연구 내용 및 방법
1. 반궤도식 산림작업차의 설계 및제작
반궤도식산림작업차는크게동력부와주행부
,
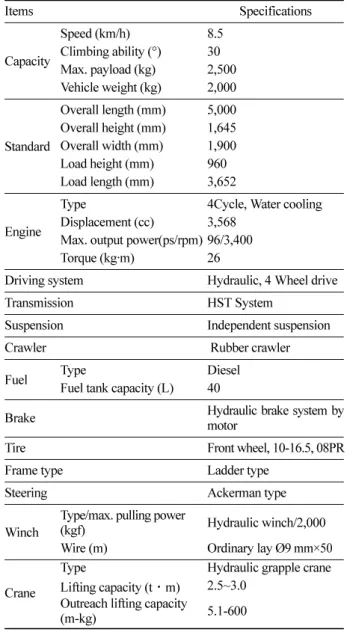
차체및Table 1. Specifications of the semi-crawler type mini-forwarder.
Items Specifications
Capacity
Speed (km/h) 8.5
Climbing ability (°) 30
Max. payload (kg) 2,500
Vehicle weight (kg) 2,000
Standard
Overall length (mm) 5,000 Overall height (mm) 1,645 Overall width (mm) 1,900
Load height (mm) 960
Load length (mm) 3,652
Engine
Type 4Cycle, Water cooling
Displacement (cc) 3,568
Max. output power(ps/rpm) 96/3,400
Torque (kg·m) 26
Driving system Hydraulic, 4 Wheel drive
Transmission HST System
Suspension Independent suspension
Crawler Rubber crawler
Fuel Type Diesel
Fuel tank capacity (L) 40
Brake Hydraulic brake system by
motor
Tire Front wheel, 10-16.5, 08PR
Frame type Ladder type
Steering Ackerman type
Winch Type/max. pulling power
(kgf) Hydraulic winch/2,000
Wire (m) Ordinary lay Ø
9 mm×50Crane
Type Hydraulic grapple crane
Lifting capacity (t · m) 2.5~3.0 Outreach lifting capacity
(m-kg) 5.1-600
적재부
,
주행조작부,
부속장치부로구분되며,
이를중심으 로전체설계도및각부분에대한상세설계도를작성하 고,
각부분및시작기를제작하였다.
본연구에서목표한 반궤도식산림작업차의제원은Table 1
과같다.
1)
동력부(1)
동력원부본연구의반궤도식산림작업차는임도및작업도의험 로주행과많은화물을적재하므로내구성과구동력을고 려하여엔진을선택해야하므로산업용또는일반자동차 용엔진중에서가장적합한엔진을선정하였다
.
(2)
유압동력부본연구의반궤도식산림작업차는기본적으로각기능 부의모든동력은엔진에연결한유압펌프에서얻은유압 동력을이용하도록설계
·
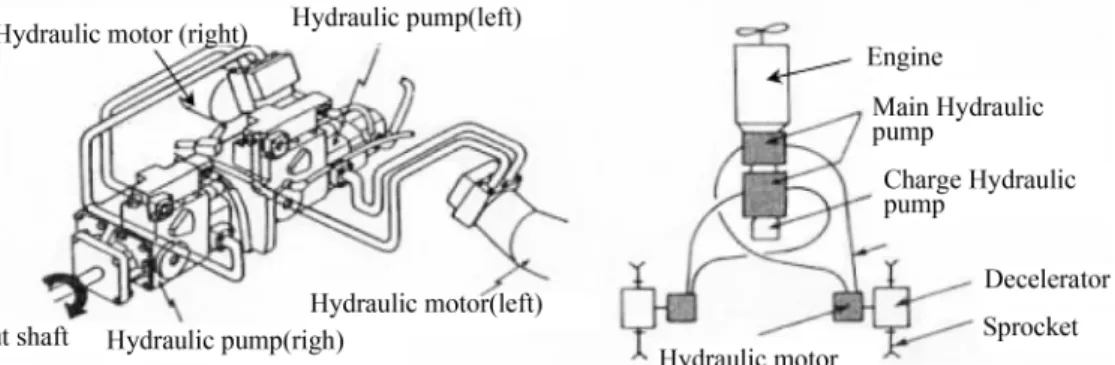
제작하였다. Figure 1
은반궤도식 산림작업차의엔진과 유압펌프및모터의 연결및회로 개념도를나타낸것이다.
기본적으로엔진에서1
개의PTO
를통해유압펌프를작동하도록하였으며
,
유압동력전달방식은
HST(Hydro-Static Transmission)
시스템을 적용하 도록설계·고안하였다. HST
시스템은엔진에서구동륜 으로이어지는유압동력전달방식을기계식트랜스미션 을사용하는대신유압에의한동력전달로차량을구동시 키는방식이다.
이방식은굴삭기나로더등의건설중장비에많이사용되고있으며
,
스키더로더도대부분이러한방식을채택하고있다
. HST
시스템은엔진에연결된유압펌프에의하여회전력을유압으로변환시키고다시구동 축의기계적회전으로환원함으로써기계식에비하여에 너지효율이낮고
,
가격이다소비싼단점이있다. HST
시스템의장점으로는구동장치를설계할경우기계의조작 이쉽고
,
구동시기동성이나응답성이높아속도변환과등 판,
미세조작작업에유리하다.
또한제동안전성이뛰어나 브레이크수명이길고A/S
비용측면에서유리하며높은 주행토크를발휘할수있다.
또한,
유압라인에의한동력전달로엔진의위치가특별히제한되지않아차량설계시
에부품배치도더욱자유롭다
(
김경욱, 2009).
2)
주행부국내외에서연구
·
개발된산림작업차의주행부는타이어식
(Wheel type)
과크롤러식(Crawler type),
이두개를절충 한형태인세미크롤러식(Semi-crawler type)
의형태가있다
(
박상준, 2009),
본연구의산림작업차는세미크롤러식(Semi-crawler type)
으로전륜은타이어식,
후륜은크롤러 식으로등판능력과작업안전성을확보하고상시4
륜구동시스템을채택하도록설계·제작하였다
.
또한,
반궤도식 산림작업차의원활한주행과안전성을감안하여전후4
륜 에설치한유압모터들의구성회로는병렬로 연결하도록 설계·제작하였다.
주행부의제동브레이크는 브레이크내장유압모터에 의한유압브레이크방식을채택하였으며
,
기본적으로제 동은산림작업차의정지에의해자동으로작동되고,
이때 전방바퀴의유압회전모터와후방크롤러의유압회전모 터가모두제동되도록설계·제작하였다.
3)
차체및적재부산림작업차의차체길이는임도및작업로의최소회전 반경설계기준이차량길이
5,000 mm
이므로이를고려하 여설계·
제작하고,
적재함의길이는우리나라에서생산되는목재의길이가대부분
3,600 mm
이하이므로이에맞게설계·제작하였다
.
적재함은두께
6 mm
의각파이프를사용하여최대적재중량인
2,500 kg
이상을견딜수있도록박스형으로고안하였고
,
적재함은차체의중량을가볍게 하기위해가이 드바를상부측으로연장설치하여목재의이탈을방지하 는역할을하도록고안하였다.
4)
주행조작부및제어시스템부산림작업차의주행조작부는기본적으로일반자동차의 운전석 조작형태로설계·제작하였고
,
주행조작은 운전 석에서조향핸들과전후주행용레버,
엑셀레이터를이용하여 조향과 전후진
,
속도를 조절하도록설계·제작하 였다.
운전석에는엔진상태와엔진속도,
연료량,
엔진온도Figure 1. Concept diagram of the hydraulic pump and motor.
등일반자동차와같이기본적인차량상태를파악할 수 있도록전면에계기판을장착하도록설계·제작하였다
.
5)
부속장치부(1)
윈치부원목의 견인과작업보조장치로산림작업차의전면부 에윈치를장착하여간이집재및로그그래플범위외의 임목을쉽게집재견인할수있도록설계·제작하였다
.
(2)
로그그래플및아웃트리거목재및기타자재를효율적으로적재및하차하기위 하여유압밸브레버로조작하는로그그래플을장착하도 록설계·제작하였으며
,
산림작업차의원목및기타자재를상하차작업할경우에차체의안정과상하차의수월성 을위해차체의중앙좌우에
2
개의아웃트리거(Out-rigger)
를장착하도록설계·제작하였다
.
2.
시작기완성및 주행성능시험반궤도식산림작업차의각종구조물제작과각종기능 부품의조립등을통하여전체시작기를제작완성하고
,
시작기에대한기본적인각기능품의작동여부의점검과 주행성능을시험하였다
.
결과 및 고찰
1. 반궤도식 산림작업차설계 및제작
반궤도식산림작업차의동력부와주행부
,
차체및적재 부,
주행조작부,
부속장치부로구분하여본연구에서목표한제원에맞게전체설계도및각부분에대한설계도를 작성하고 시작기를제작하였다
.
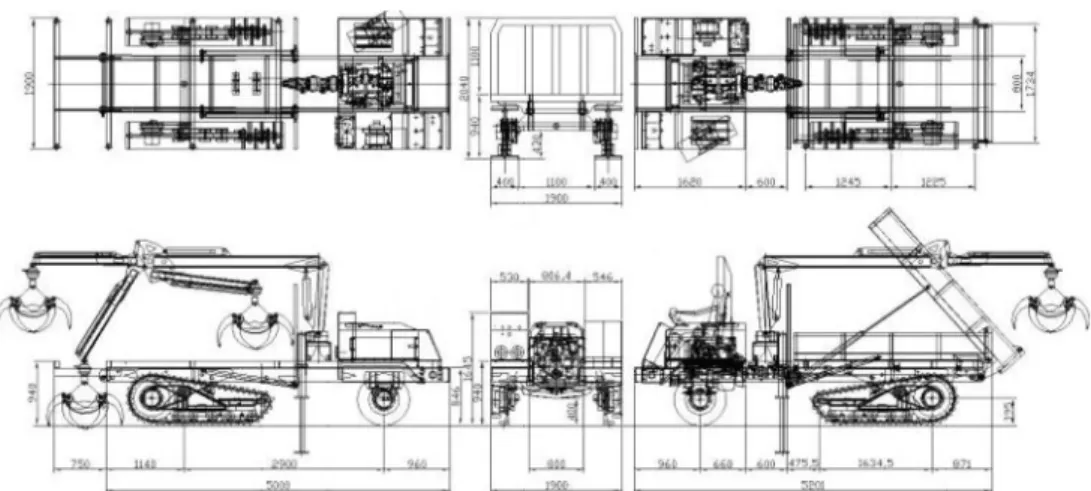
반궤도식 산림작업차의 전체설계도는Figure 2
와같다.
1)
동력부(1)
동력원부본연구·개발대상기계인반궤도식산림작업차에탑 재할엔진은내마모성및내구성이높고중저속에서토크 가높아차량용으로적합하며
,
일반산업기계에많이이용되고 있는 국내
H
사의 엔진을 선정하였다.
모델명은D4AF
이고배기량3,568 cc
로서3,400 rpm
에서96
마력의 출력이가능한엔진이다(
현대자동차마북리연구소, 1992).
또한
,
본D4AF
엔진을선정한것은반궤도식산림작업차의연구·개발에서목표한최대속도및등판능력등목표 제원에맞게최대회전수를고려하여선정하였다
(Figure 3).
(2)
유압동력부본연구의반궤도식산림작업차의유압동력은기본적 으로엔진에유압펌프를연결하여얻은유압력을이용하 였으며
,
산림작업차의주행부와각작업부에유압력을발생시켜보내주는유압펌프이다
.
산림작업차의유압동력부 는주행성능과각작업기능의작업능력을좌우하는부분 이므로유압펌프는시작기의각종기능품에대한유압동 력을최대한확보하고각기능품의조작을용이하게제어 하기위해주펌프와보조펌프로나누어선정하였으며,
주행용주펌프
2
개와작업용보조펌프2
개로구성시켜장착Figure 2. Design drawing of the semi-crawler type mini-forwarder.
Figure 3. The engine used in the semi-crawler type mini-
forwarder.
하였다
.
주펌프는전후좌우4
개의주행용유압모터에사 용하고,
보조펌프는각종부속장치부에사용하도록장착 하였다.
유압펌프의선정은연구개발목표에서설정한주행속도및작업기의성능에맞는용량의펌프를선정하여 야한다
.
따라서연구개발목표의주행속도와작업기성 능을고려하여58 cc
의주펌프2
개와22 cc
및16 cc
의보 조펌프각각1
개씩4
련으로제작된이탈리아제품의유압 펌프를선정하였다. Table 2
는선정한주행용주유압펌프의제원을나타낸것이며
, Figure 4
는본연구에사용된4
련유압펌프의모습이다
.
유압동력은기본적으로엔진에서1
개의
PTO
를통해유압펌프가작동되어주행부등각기능 부에유압동력이전달되며,
동력전달방식은HST(Hydro- Static Transmission)
시스템을적용하여제작하였다.
또한
,
주펌프는산림작업차의주행속도의목표치가8.5
km/hr
이므로그에맞는유압펌프가필요하며,
그에따른유압펍프의토출량이필요하므로다음과같이유압펌프의 토출량을산출하였다
(
국립산림과학원, 2001;
이주성, 2000).
즉
,
유압펌프에서의 최대 토출량(Maximum flow generated by pump)
은다음과같다.
·최대토출량
= =
여기서
, 2
개의주유압펌프는전륜고무차륜용유압모터2
개와후륜크롤러차륜용유압모터
2
개에직렬로연결되어구동되는별도의유압회로를가지므로각유압모터에공
급되는유량
(L/min)
은다음과같다.
·유량
=
따라서
,
각차륜에공급되는유량은93.67 L/min
이다.
또한
,
반궤도식산림작업차의주행장치에대한유압동 력라인은원활한 주행과안전성을감안하여전후4
륜에 설치한 유압모터들의유압동력구성회로를병렬로 연결 하여시작기를제작하였다.
그결과전후4
개의주행장치가서로노면과의접지압이상이하고
,
주행장치의유압동 력라인이병렬로 연결되므로바퀴의슬립현상과노면상 태가 불량할경우구동불균형이발생하는것을방지할 수있다.
2)
주행부반궤도식산림작업차의주행부는전륜이고무바퀴차륜 이고 후륜이 고무크롤러차륜으로 제작하였다
.
주행부는 주행속도를결정하며,
유압동력부의유압펌프용량과주 행부의유압모터용량에따라달라지므로본연구개발목 표의주행속도에맞는용량의유압모터를선정하여야한 다.
따라서,
연구개발목표의주행속도에맞추기위해유 압모터의최대(
최소)
회전속도와반궤도식산림작업차의 최고(
최저)
주행속도를산출하여야하므로다음과같이산 출하였다(
국립산림과학원, 2001;
이주성, 2000).
즉
, 2
단변속인유압모터의최대및최소회전속도는다음과같다
.
·최대
(
최소)
회전속도=
·최고
(
최저)
주행속도=
유압모터최대(
최소)
회전속도따라서
,
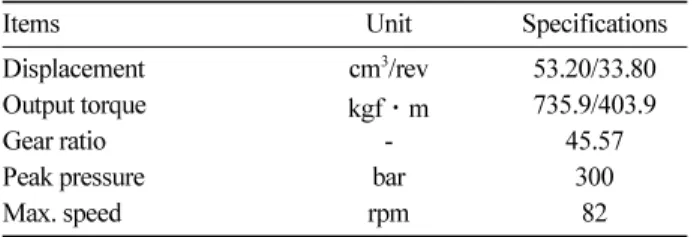
본연구개발목표에맞는유압모터를선정하여 야하므로Table 3
의제원및Figure 5
와같은유압모터를 선정하였으며,
유압모터의최대및최소용적이각각53.20 cc/rev
와33.80 cc/rev
이므로각전·후륜의유압모터최대1 000 ,
---
회전수 × 펌프토출량 × 용적효율
n Vp × × η 1 000 ,
--- 3 400 58 0.95 , × ( + ) 1 000 ,
--- 374.68 L min ⁄
= =
--- 374.67
전체토출량= --- 93.67 L min 4 = ⁄
펌프에연결된라인수
---
공급유량
(cc)
×용적효율 모터(
최대/
최소)
체적(cc)
---
×
π×타이어직경×60
1,000
×모터감속비Table 2. Specification of the hydraulic main pump.
Items Unit Specifications
Displacement cc 58
Pressure rating bar
bar 380
Peak pressure 420
Pump speed rpm 500-3,300
Max. oil temperature 80
Max. housing pressure bar 1.5
Inertial mass N · m · s
262×10
−4Weight kg 48
Figure 4. Hydraulic pump used in the semi-crawler type mini-forwarder.
Table 3. Specifications of the hydraulic motor.
Items Unit Specifications
Displacement cm
3/rev 53.20/33.80
Output torque kgf · m 735.9/403.9
Gear ratio - 45.57
Peak pressure bar 300
Max. speed rpm 82
및최소회전속도는다음과같이산출되었다
.
·최대회전속도
·최소회전속도
여기서유압펌프가최대토출량을공급할때모터의최대 및최저회전속도를이용하여반궤도식산림작업차의최고
및최저주행속도
(km/hr)
를아래와같이산출할수있다.
즉
,
산림작업차의최고및최저주행속도는다음과같다.
·최고주행속도
=
유압모터최대회전속도(rpm)
= 8.27 km/hr
·최저주행속도
=
유압모터최소회전속도(rpm)
= 5.07 km/hr
따라서
,
반궤도식산림작업차의최고및최저주행속도 는8.27 km/hr
및5.07 km/hr
라는것을 알수있었으며,
본연구과제의목표제원에맞출수있었다
.
반궤도식 산림작업차량의 전륜 고무타이어바퀴부에 사용된고무타이어는
H
사의타이어로제원은Table 4
와같으며
,
크기가10-16.5
이고플라이급수가8
인외부직경760 mm
의타이어를사용하였다.
이타이어는접지장을차륜당
20 cm
정도확보할 경우평균 접지압은 약1.8
kgf/cm
3정도까지감소시킬수있다. Figure 6
은전륜고무 타이어바퀴부의제작된모습을나타낸것이며,
접지압을 더줄이기위해서는보다광폭의저압타이어나트랙션벨 트트랙을검토하여야할것이다.
외국의습지용포워더는저압광폭타이어를사용하거나차륜에철제또는플라스 틱제벨트트랙을설치하여접지압을
1 kgf/cm
3이하로줄 이기도한다.
반궤도식산림작업차량의후륜크롤러바퀴부는고무크 롤러를이용하여작업로를보호하고소음을적게내며노 면의충격을완화시키는작용을하도록제작하였고
,
특히임도주행시노면의파손율을최소화시키고진동과소음 을줄여기계의수명을연장시키고운전자의피로를줄일 수있도록고무크롤러를사용하였다
.
본연구과제에서사 용한고무크롤러는크기와기능을 고려하여고무크롤러 를전문적으로생산하고있는국내D
사에특별히주문하여
400 mm×90 mm×55
개(
크롤러폭×
링크사이간격(
피치)
---
공급유량
(cc)
×용적효율 최소모터체적(cc) 93 670 0.95 , ×
33 80 ,
---
= = 2 633 rpm ,
---
공급유량
(cc)
×용적효율 최소모터체적(cc) 93 670 , × 0.95
53.20 ---
= = 1 612 rpm ,
---
×
π×타이어직경(m)
×60
1,000
×모터감속비2 633 , π × 0.760 × 60 1 000 45.57 , × ---
= ×
---
×
π×타이어직경(m)
×60
1,000
×모터감속비= 612 1 , π × 0.760 60 ×
1 000 , × 45.57 ---
×
Figure 5. Hydraulic motor used in semi-crawler type mini- forwarder.
Table 4. Specification of the wheel tire.
Tire size PR Type Standard
rim Overall diameter
(mm) Section width
(mm) Tread depth
(mm) Max. load
(kg) Inflation
(kgf/cm
2)
405B 10-16.5 8 T/L 8.25 760 273 20 1,863 4.2
Figure 6. Front wheel part.
×
링크수)
규격의고무크롤러를사용하였다.
주행부는전 방바퀴및후방크롤러에각각 좌우바퀴를별개의 암(arm)
에의해지지하는방식인독립현가방식을채택하였다
(Figure 7).
또한
,
주행의 원리는전기 스위치식레버의 전·후진 모드로 전환하면주펌프의가동으로유압이유압모터에 공급되고,
이때유압모터가주차브레이크역할을하는네거티브
(Negative)
유압브레이크방식이채택되어있어서브레이크가자동으로해제되어유압회전모터들이구동 하고전륜및후륜이회전하여주행하게된다
.
제동장치 의원리는전기스위치식레버의주행모드를중립으로전 환하면유압모터에내장된브레이크가작동하여유압회 전모터측으로유압이흐르지않으므로자동으로유압회 전모터가브레이크에의해서잠기게되어주행이되지않 고제동이걸리게된다.
이와같이주행과제동은브레이 크내장의유압모터에의해유압의공급여부에의해이 루어지며,
산림작업차량의속도는엑셀레이터에의한엔 진의회전수 및유압펌프의유압량 증감에따라속도가 조절되게된다.
3)
차체및적재부반궤도식산림작업차량의전체적인차체구조는 앞부
분에엔진과운전및조작석이확보되어있고
,
뒷부분에 로그그래플크레인및적재함이탑재되어원목을적재할 수있도록설계·제작하였다.
산림작업차량의기본차체는최소회전반경설계기준이차량길이
5 m
이고,
우리나라에서생산되는목재의길이가대부분
2.8~3.6 m
이므로이에 맞게 차체 프레임부의 총길이는
5,750 mm(
본체-
5,000 mm,
보조차체-750 mm),
적재함의 길이는 최대3,730 mm,
적재프레임의높이는1,100 mm,
차체의 폭은작업도의폭이
2 m
이상이고안전성을고려하여1,900 mm
로설계·제작하였다
.
또한,
적재부의적재용량은약2.5 m
3(2 ton)
으로설계·제작하였으며,
적재부는각종운반물을적재하고덤프기능을가지는차체부분으로제작하고
,
적 재부의구조는산림작업차가주로원목을운반하는차량 이므로주로원목적재의수월성과차체의중량을감소 시키고원목의이탈방지를목적으로몇개의철제기둥 가이드바를설치하였다.
적재부는토목자재운반을위해 적재부위에보조적재부를장착할수있도록설계·제 작하고,
유압실린더를이용하여덤프를할수있도록설계·제작하였다
(Figure 8).
4)
주행조작부반궤도식산림작업차량의주행조작부는앞부분에일반
Figure 7. Rear crawler part.
Figure 8. Loading part.
적인자동차운전에맞게운전및조작석을설계·제작하 였다
.
운전석은로그그래플작업시시야의확보와신속한 작업이가능하도록덮개를장착하지않았으며,
기본차량 의전면은차체좌측에운전자의안전을확보하기위하여 보호프레임을설계·제작하였다(Figure 9).
또한
,
주행조작부는반궤도식다목적산림작업차의주 행을조작하기위한부분으로서핸들에의한방향전환과 전후진조작레버,
운전석,
가속페달등으로구성한다.
주 행부의스티어링은구조가간단한전륜방향전환방식인 애커만조향방식(Ackerman type steering)
을채택하였다.
주행의전후진은전기식조작레버로작동되며
,
전진모 드와중립모드,
후진모드로작동시켜유압펌프내의방향 조절판의방향을바꾸어유압의흐름을바꾸어작업차의 방향을전진및후진으로주행하도록설계·제작하였다.
중립모드시에는유압의 흐름이차단되어차체의제동장 치가작동되게된다
.
또한,
운전석의공간은작업원이가 속엑셀레이터페달을조작하는데충분한공간을갖도록 설계·제작하였다.
5)
부속장치부(1)
윈치산림작업차의전면부에장착하여간이집재시및로그 그래플의작업범위외의임목을견인하여집재할수있도 록설계·제작하였다
(Figure 10).
윈치의동력원은보조유 압펌프의유압동력을받아윈치에부착된유압모터이다.
윈치에 사용된유압모터는
350 cc
용량의 오비트모터(Orbit motor)
이며,
윈치의견인력은1 ton,
와이어로프는 보통꼬임의Ø9 mm×50 m
을사용하였다.
드럼의규격은 베어드럼직경120 mm,
드럼폭300 mm,
플랜지직경270 mm
이다.
윈치의와이어로프를풀어견인할때는유압동력이가동되지않는상태에서풀리는
Free pulling system
을이용하였고
,
감속기의기어는맞물림클러치로서레버 에의하여작동하는방식이며,
속도의조절은엔진의회 전수로조절하도록설계·제작하였다.
(2)
크레인및아웃트리거산림작업차의크레인은회전방식이
6
톤·m
급에사용하여도강도및내구성에서무리가없는
Single rack
방식 을사용하였고,
칼럼(Column)
은일반적으로산업용에적 용되는고장력강을이용하여굽힘이나좌굴에강하고안 전성을확보하도록설계·제작하였다.
Figure 9. Control part.
Figure 10. Winch.
Table 5. Specification of crane attached log grapple.
Item Unit Specification
Lifting capacity ton-m 3
Outreach lifting capacity m-kg 2.5-1,200
4.1-730 5.1-600
Hydraulic boom extension m 0.81
Slewing angle ° 400
Slewing torque kN 5.8
Slewing speed °/sec 15
Lifting angle ° -40~70
Lifting speed °/sec 6
Out-rigger span m 2.78
Extension boom speed m/sec 3
Recommended oil flow L/min 30
Weight without O/R kg 690
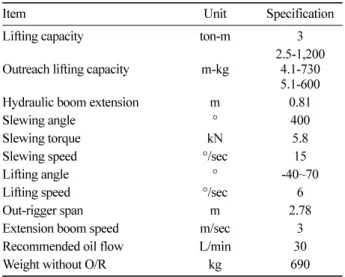
본 산림작업차의 개발에 적용한 크레인은
H
사의3,000XG
모델이고,
그의제원은Table 5
와같으며, Lifting capacity
는3
톤·m, Slewing
각도는400°, Slewing
속도는15°/sec, Lifting
각도및속도는각각-40~70°
와6°/sec
이다
.
붐(Boom)
의 기복각도는75°
로 설정하여 신축식붐(Inner Boom)
의실린더행정거리를설정하였으며,
각실린더는강하고충분한인양력을발휘하도록설계·제작
하였다
.
신축식붐과외부붐(Outer boom)
의연결은연결용링크를사용하였다
.
최대작업반경은산림작업차의규격에맞추어
5,000 mm
로설계·제작하였으며,
신축식붐에의한 연장실린더
(Extension cylinder)
가250 mm
이며,
붐의전체신장시의길이는
5,250 mm
가되므로산림작업차의작업에충분한작업반경을확보하도록하였다
.
컬럼 의높이는1,900 mm,
인양무게는500 kg,
최대인양무게는약
600 kg
이되도록설계·제작하였다.
또한,
크레인의조작은
6
개방향의조작이가능한6
연밸브를장착 하고이를일반레버형태로조작하도록설계·제작하였 다(Figure 11).
아웃트리거
(Out rigger)
는산림작업차의원목상·하차 작업시에전도등의위험을방지하기위한안전장치로서 장착하였고,
잭실런더스트로크의길이가500 mm
가되도 록설계·제작하였으며,
지면보다20 mm
가더내려가도록하였고
,
스트로크의길이가부족할때는추가부품을부착할수있도록설계·제작하였다
.
또한,
아우트리거의 조작은2
연밸브를장착하고이를일반레버형태로조작하며
,
양쪽에서조작하도록장착하였다(Figure 12).
2. 시작기 완성 및주행성능시험
반궤도식산림작업차의전체구조물제작과각종기능부 품의 조립을통하여전체시작기를 제작완성하였으며