고응답 특성을 갖는 IPM형 Low-cost 서보 모터 개발
Development of IPM type low-cost servo motor with high response characteristics
이기덕 Ki-Doek Lee
1. 서 론
최근에 일본 및 독일 등을 선두로 선진사들은 높 은 응답특성을 갖는 High-end급 제품으로 세계 제조 로봇용 서보 모터 시장을 Leading 하고 있으며, 특 히 일본의 Fanuc은 회전자에 영구자석을 삽입하는 IPM(Interior Permanent Magnet; 영구자석이 회전자 내부에 매입) 타입의 제품개발을 통하여 종래 SPM(Surface mounted Permanent Magnet; 영구자석이 회전자 표면에 부착) 대비 높은 토크밀도 확보와 영 구자석 사용량을 절감하는 제품(기술)을 출시하고 있다. IPM 타입 서보모터는 일반적으로 사용되고 있는 SPM 타입에 비하여 동일 사이즈 대비 고출력 화가 가능함으로, 상대적으로 영구자석 사용량을 줄 여 Cost 절감이 가능하다. 그러나, IPM 타입은 토크 리플(Torque ripple)이 커질 수 있고 제어변수의 복잡 성으로 인해 제어의 어려움이 있으므로, 코깅 토크 (Cogging torque)를 최소화 하면서도 토크밀도를 높 일 수 있는 독창성 있는 구조/형상 최적화 설계기술 이 요구된다[1].
“제조로봇용 3kHz급 고응답 특성을 갖는 IPM형 Low-cost 서보 모터 및 고속 통합 네트워크형 드라 이브 국산화 개발” 과제는 산업부의 산업핵심기술 개발사업으로 한국전자기술연구원이 서보 모터 설 계 및 해석을 담당하여 서보모터의 고응답 특성 및 가격 경쟁력 국산화 기술 확보를 위해 수행한 과제 이다.
2. 서보모터
서보모터(Servomotor)는 주어진 신호에 따라 위치, 속도, 가속도 등을 정확하게 제어할 수 있는 모터로 로봇 등에 주로 활용되고 있다. 그림 1은 서보모터 의 구조로 고정자 코어, 고정자 코일, 회전자 코어, 마그넷, 샤프트, 베어링, 하우징, 엔코더 등으로 구 성되어 있다[2].
Rotor core Stator
core Encoder
Shaft
Rotor magnet
Housing Bearing
Fig. 1 서보모터 구조
서보모터 회전자 타입은 그림 2와 같이 (a)표면부 착형, (b)표면삽입형, (c)매입형, (d)스포크형 등으로 다양하다. 서보모터에는 주로 표면부착형이 적용되 었으나 본 과제에서는 가격 저감 및 고응답특성을 위해 매입형과 스포크형으로 개발을 수행하였다.
(a) (b) (c) (d) Fig. 2 서보모터 회전자 타입
서보모터 고정자 타입은 그림 3과 같이 집중권과 분포권으로 분류된다. 사이즈 저감을 위해 대부분 집중권이 적용되며, 본 과제에서도 집중권을 적용하 여 개발을 수행하였다.
(a) 집중권 (b) 분포권 Fig. 3 서보모터 고정자 타입
3. 고응답 저가형 서보모터 개발
3.1 편심이 적용된 회전자 형상에 따른 특성 매입형 회전자는 마그넷이 회전자 코어 내부에 매입되어 구조적으로 안전하나 코깅토크 및 고조파 에 취약하여 회전자 편심에 따른 상역기전력, THD, 코깅토크를 분석하였다. 그림 4는 편심에 따른 특성 분석을 위한 고정자와 회전자 형상이다.
고정자 형상 M1 회전자 : 편심 6mm
M2 회전자 : 편심 12mm M3 회전자 : 편심 18mm
Fig. 4 고정자 형상 및 편심이 적용된 회전자 형상
그림 5와 표 1은 편심이 다른 3모델의 해석 결과 이다. 역기전력은 편심이 가장 작은 M1 가장 높았 다. THD는 M2가 가장 낮았으며, 코깅토크는 편심 이 많이 적용될수록 줄어듬을 확인하였다. 이러한 이유로 목표한 역기전력을 유지하면서 코깅토크를 저감할 수 있는 12mm 편심의 회전자를 서보모터 개발에 적용하였다.
상역기전력
0 60 120 180 240 300 360
-80 -60 -40 -20 0 20 40 60 80
P has e Ba ck EMF [Vrm s] (@ 1 000 RP M )
Electric Angle [degree]
M1 M2 M3
5 10 15 20
0 2 4 6 80 100
Harmonic order
Amplitude
M1 M2 M3
Total Harmonic Distortion
코깅토크
0 5 10 15 20 25 30
-120 -90 -60 -30 0 30 60 90 120
Coggi ng T or que [m N m ] (p ea k t o pea k)
Mechanical Angle [degree]
M1 M2 M3
Fig. 5 편심에 따른 상역기전력, THD, 코깅토크
Table 1 회전자 편심량에 따른 특성 결과 편심
[mm]
상역기전력 [V
rms
]THD [%]
코깅토크 [mNm]
6.0 39.68 5.50 153.6 12.0 37.24 2.22 104.2 18.0 34.69 4.26 13.1
3.2 가격 저감을 위한 서보모터 타입 분석
서보모터의 가격 저감을 위해 모터에 사용되는 코어, 마그넷, 코일 등 재료 사용량 저감이 필요하 다. 서보모터의 출력밀도를 향상시키면 목표 출력에 서 작은 부피(재료비 사용량 저감)의 모터가 될 수 있다. 출력밀도 분석을 위해 회전자 극수와 회전자 타입에 따라 4가지 모델을 분석하였다. 그림 6은 분 석한 4가지 모델로 8극12슬롯 매입형, 8극12슬롯 스 포크형, 10극12슬롯 매입형, 10극12슬롯 스포크형이 다. 모터에서 희토류 마그넷이 차지하는 재료비가 약 50%내외로 서보모터의 가격 저감을 위해서는 마 그넷 사용량을 줄여야한다. 스포크형의 영구자석 사 용량은 매입형의 절반으로 모델링하여 특성을 분석 하였다.
8p12s IPM 8p12s Spoke
10p12s Spoke 10p12s IPM
Fig. 6 각 모델의 극수와 회전자 형상 변화 비교
그림7은 각 모델의 역기전력 파형이며, 마그넷 사 용량을 절반으로 줄인 스포크형도 매입형과 거의 동일한 성능임을 확인하였다.
각 모델의 인덕턴스 비교 결과 q축 성분은 거의 동일한 특성을 가지고 d축 성분의 경우, 8극 모델보 다는 10극 모델이 그리고 IPM 보다는 Spoke 타입이 큰 값을 가지는 것을 확인하였다. 따라서 돌극비는 8극12슬롯(IPM)>8극12슬롯(Spoke)>10극12슬롯 (IPM)>10극12슬롯(Spoke) 순이다.
0 30 60 90 120 150 180 210 240 270 300 330 360 -60
-50 -40 -30 -20 -10 0 10 20 30 40 50 60
Bac k- EM F [ V
rms]
Electrical Degree [
o]
8P12S IPM 8P12S SPOKE 10P12S IPM 10P12S SPOKE
Fig. 7 각 모델의 역기전력
8P12S(IPM) 8P12S(SPOKE) 10P12S(IPM) 10P12S(SPOKE) 1.5
1.7 1.9 2.1 2.3 2.5
L
q/L
dL
dL
d, L
q[m H]
Motor Type
Ld Lq Ld/Ld
L
q1.0 1.1 1.2 1.3 1.4 1.5
Salienc y Ratio
(L
q/L
d)[m H]
Fig. 8 각 모델의 d축, q축 인덕턴스 및 돌극비
3.3 □180mm급 서보모터 설계
최종 타입 결정을 위해 역기전력이 높은 매입형 과 스포크형 각 1모델씩 특성 분석을 수행하였다.
그림 9는 8p12s 매입형, 10p12s 스포크형의 자속밀 도 분포도이다. 빨간 포인트에서의 자속 값이 표2에 나타나 있으며 무부하와 부하시 둘 다 스포크형의 자속밀도가 낮음을 확인하였다.
Fig. 9 두 모델의 자속밀도 값
Table 2 각 모델의 자속밀도 값
구분
8극12슬롯 (IPM)
10극12슬롯 (Spoke)
치 요크 치 요크
무부하 1.31 1.64 1.10 1.33 부하 1.74 1.98 1.56 1.85
그림 10은 두 모델의 코깅토크, 정격토크, 상역기 전력 해석 결과이다. 코깅토크 특성의 경우 8p12s 매입형이 10p12s 스포크형 보다 3배 가량 큼을 그림 10 (a)에서 확인할 수 있다. 코깅토크는 무부하시에 회전자를 회전시킬 때 발생하는 힘으로 그 크기가 클수록 서보모터의 제어 및 소음/진동 특성이 불리 하게 된다.
그림 10 (b)는 두 모델의 정격토크 파형으로 8p12s 매입형의 평균토크가 10p12s 스포크형 보다
0 3 6 9 12 15
-0.30 -0.25 -0.20 -0.15 -0.10 -0.05 0.00 0.05 0.10 0.15 0.20 0.25 0.30
Cog ging Torque(Nm)
Mechanical Angle ( )
8P 12S 10P 12S
(a) 코깅토크
0 3 6 9 12 15 18 21 24 27 30 0
3 6 9 12 15 18 21 24 27 30
T orque(Nm)
Mechanical Angle ( )
8P 12S 10P 12S
(b) 정격토크
0 60 120 180 240 300 360
-200 -160 -120 -80 -40 0 40 80 120 160 200
Ba ck EMF (V)
Mechanical Angle ( )
8P 12S 10P 12S
(c) 상역기전력(@1000rpm)
Fig. 10 각 모델의 코깅토크, 정격토크, 상역기전력
큼을 확인하였다. 반면 토크리플이 8p12s 모델이 상 당히 커 정밀제어가 요구되는 서보모터에 불리하다.
그리고 영구자석 사용량을 고려한다면 10p12s의 스 포크형이 마그넷 사용량 대비 토크 특성이 우수하 다 할 수 있다.
0 500 1000 1500 2000 2500 3000
0 10 20 30 40 50 60 70 80 90
Tor que [ Nm ]
Speed [RPM]
23.6Nm (3707W) 1500 RPM 15.3A rms / 227.3VDC
70.8Nm (17053W) 2300 RPM 45.9A rms / 473.9VDC
29Nm (9111W) 3000 RPM 18.8A rms / 476.8VDC
Fig. 11 □180mm급 10극 12슬롯 스포크형 모델 속 도별 부하특성
□180mm급 10극 12슬롯 스포크형 모델의 속도별 부하특성이 그림 11에 나타나있다. 정격은 23.6Nm@1500rpm이며, 최대토크는 약 3배 이상인 70.8Nm가 발생함을 확인하였다. 최대속도는 약자속 제어를 통해 정격속도의 2배인 3000rpm에서 구동함 을 확인하였다.
3.4 서보모터 시험 및 시스템 적용 시험
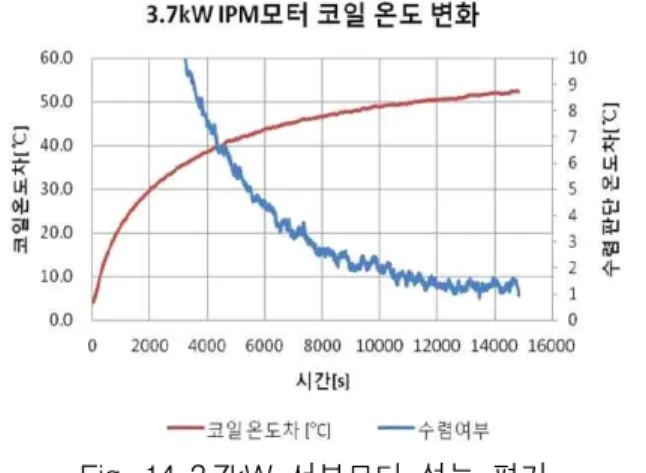
그림 12는 개발된 서보모터로 5.0, 8.5, 7.5kW는 매입형 타입이고, 3.7, 4.4, 5.5kW는 스포크형 타입 이다. 이렇게 개발된 모터들은 다이나모 시스템을 이용해 모터 단품 성능을 평가하게 된다. 그림 14는 개발된 □180mm 3.7kW 모터의 출력, 효율, 열포화 특성을 평가한 결과이다.
Fig. 12 고응답 서보모터 시리즈화 개발
Fig. 13 서보모터 성능 평가 장치
Fig. 14 3.7kW 서보모터 성능 평가
그림 15는 개발된 서보모터를 로봇 시스템에 적 용하여 평가한 한가지 예로 반복정밀도 측정을 위 한 경로이다. 반복정밀도 측정을 위한 경로로 P1→
P2→P3→P4→P5→P1의 경로를 반복 이동하며 평가 한다. 반복정밀도 측정 결과 설정된 작업공간 내에 서 0.04mm이하의 반복정밀도 성능을 가짐을 확인하 였고, 이처럼 개발된 서보모터를 시스템에 적용하여 최종적으로 성능을 검증하게 된다.
Fig. 15 반복정밀도 시험 평면 및 시험 경로
Fig. 16 반복정밀도 시험 결과
4. 결 론
고응답 저가형 서보모터 개발을 위해 코깅 토크 최소화와 토크밀도 향상 설계를 수행하였다. 회전자 타입(매입형, 스포크형), 극수, 편심 등을 분석한 결 과를 기반으로 매입형과 스포크형 서보모터의 시리 즈화 개발을 완료하였고, 모터 단품 평가와 로봇 시 스템에 적용하여 개발 서보모터의 성능 검증을 완 료하였다.
향후, 굴착기를 포함한 건설기계(로봇) 분야에 부 합하는 사양의 서보모터를 개발하여 내구성과 신뢰 성까지 확보해 나갈 계획이다.
참고 문헌
1) 이주, 정태철. (2013). 영구자석 전동기 설계 기 술 동향. 전력전자학회지, 18(5), 29-33.
2) 원충연. (2003). 영구자석형 교류 서보모터 종류 및 동향. 조명·전기설비, 17(1), 41-51.
[저자 소개]
이기덕