227
터널 유지관리를 위한 지상 LiDAR 기반의 구조물 변상탐지 기법 연구
배상우
1
*·곽재환1
·김태호1
·박성욱1
·이진덕2
1
넥스지오,
2금오공과대학교 토목환경공학부
A Terrestrial LiDAR Based Method for Detecting Structural Deterioration, and Its Application to Tunnel Maintenance
Sang Woo Bae 1 *, Jae Hwan Kwak 1 , Tae Ho Kim 1 , Sung Wook Park 1 , and Jin Duk Lee 2
1
NexGeo Inc.
2
School of Civil and Environmental Engineering, Kumoh National Institute of Technology Received 9 April 2015; received in revised form 23 April 2015; accepted 30 April 2015
최근 빈번한 재난, 재해발생으로 인해 구조물의 점검 및 유지관리가 국가적으로 매우 중요한 요소가 되었다. 구조물 점검 은 대부분 인력에 의한 육안조사에 의존하고 있어, 취득 자료의 객관성 결여 및 환경적 특성에 따른 접근성의 한계로 인한 정량적 자료 취득이 불가한 경우도 발생되고 있다. 따라서 이러한 직접적인 육안조사의 한계성을 극복하고, 표준화된 조사 데이터 수집을 위해서 비접촉식 자료 취득 방법인 레이저스캐너를 활용하여 구조물의 변상을 탐지하는 연구가 활발히 진행 되고 있다. 하지만 현재까지는 현장에서 레이저스캐너를 이용하여 취득된 점군자료를 수동적으로 변상에 의한 기하학적 특성 을 다시 정의해야 하는 작업이 요구되었다. 본 연구에서는 인력접근의 한계성을 고려한 자동화된 유지관리 적용을 위해 레 이저스캐너의 반사강도를 이용하여 구조물의 열화에 따른 위해요인(백태, 누수, 박리 등)을 탐지할 수 있는 방안을 모색하였 다. 연구수행결과 백태, 누수, 박리와 같은 구조물의 열화현상에 대한 탐지가 가능하였으며, 변상유형에 따른 반사강도 특성 을 규명함으로써, 향후 유지관리 시 자동화된 변상유형 분류 및 폴리곤 영역의 객체화 가능성을 확인하였다. 구조물의 점검 및 유지관리 측면에 있어 레이저스캐너의 반사강도를 이용하는 방법은 매우 효과적인 것으로 결론을 얻었다.
주요어: 레이저스캐너, 반사강도, 시간차방식, 백태, 누수, 박리
In recent years, owing to the frequent occurrence of natural disasters, the inspection and maintenance of structures have become increasingly important on a national scale. However, because most structural inspections are carried out manu- ally, and due to the lack of objectivity in data acquisition, quantitative data are not always available. As a result, research- ers are seeking ways to collect and standardize survey data using terrestrial laser scanning, thereby bypassing the limitations associated with visual investigations. However, field data acquired using a laser scanner have been required to measure changes in structure geometry resulting from passive deterioration. In this study, we demonstrate that it is pos- sible to identify the processes of structural deterioration (e.g., efflorescence, leakage, delamination) using intensity data from terrestrial laser scanning. Additionally, we confirm the viability of automated classification of alteration type and objectification of the polygon area by establishing intensity characteristics. Finally, we show that our method is effective for structural inspection and maintenance.
Key words: laser scanner, intensity, time-of flight, efflorescence, leakage, delamination
*Corresponding author: [email protected]
ⓒ 2015, The Korean Society of Engineering Geology
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons. org/
licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is prop-
erly cited.
서 론
선진국은 댐, 교량, 터널과 같은 고가 구조물의 교통 네트워크 건설이나 취약 요소 보강, 보수에 많은 투자가 이루어지고 있다(Gonzalez-Jorge et al, 2012).
최근 우리나라의 경우, 싱크홀 사고, 환풍기 붕괴사 고, 일부 놀이동산의 저층부 쇼핑몰 및 아쿠아리움 균열 발생, 상수관 파열사고 등 재난, 재해가 지속적으로 발 생되고 있다. 이러한 결과로 인해 국민의 안정성 확보를 위한 국가적 정책들이 마련되고 있는 실정이며, 예전에 비해 구조물의 효과적인 점검 및 검진에 대한 연구지원 및 투자가 활발하게 이루어지고 있다.
일반적으로 구조물의 점검 및 조사는 대부분 인력에 의한 육안조사에 의존하고 있다. 하지만 인력에 의한 육 안조사 시 구조물의 피해, 변형규모파악 및 안정성 판단 에 대한 기준이 조사자에 따라 달라질 수 있는 한계성 이 있다. 또한 현장에서 수기로 기록된 자료(체크리스트 등)의 디지털화 과정에서 시간 소요 및 전환 과정에서 의 오차발생의 가능성이 있다. 즉, 현장 점검 시 인력에 의존하는 육안조사는 데이터의 신뢰성, 객관성 및 정량 적 평가가 상이해 질 수 있는 문제점이 있다. 이러한 문제점을 해결하기 위해 비접촉식의 정량적인 조사방안 및 기술개발이 요구되고 있다.
국내외에서 최근 많이 연구되고 있는 비접촉식의 구 조물 조사방법은 크게 영상, 레이저, 열적외선 등을 이 용한 방법이다(Haack et al., 1995; Richards, 1996). 특 히, 영상(Sasama et al., 1996)과 레이저를 이용한 검측 방안은(Girardeau-Montaut et al., 2005; Lindenbergh et al., 2005) 활발한 기술개발을 통한 적용, 상용화가 이루 어지고 있다.
본 연구에서 수행한 레이저스캐너 검측방법은 대상 의 물체표면을 3차원 좌표가 포함된 고해상도의 점군 들을 단시간에 수집할 수 있는 방법으로, 수집된 점군 자료와 컬러이미지 병합을 통한 대상체의 3D 분석 및 대상체 특성에 따른 반사강도의 차이에 의한 분석이 가 능하다. 기존의 레이저스캐너는 3D 시각화에 따른 분 석방법에 대한 연구가 많이 진행되었으나, 최근에는 전 자기파 반사강도의 활용 가치를 인지하여, 반사강도를 이용한 연구가 점차 증가하는 추세이며, 다양한 분야에 서 연구가 진행 되고 있다(Julia Armesto-Gonzalez et al., 2010; Gonzalez-Jorge et al., 2012; Fabiane et al., 2013).
본 연구에서는 짧은 소요시간으로 대량의 점군데이터
를 취득할 수 있는 장점이 있는 레이저스캐너를 이용하 여 수집된 물체의 반사강도에 따른 구조물의 변상현상 탐지 연구를 수행하였다.
레이저스캐너의 개요
지상 레이저스캐너는 레이저를 이용한 에어본 라이다 의 측량원리를 기본으로 하는 원격탐사측정방식 중 하 나이다. 라이다 기술은 레이저를 대상체 표면에 발사하 여 대상체 표면의 공간위치정보(x, y, z)를 갖는 무수한 관측점군(point-cloud)으로 대상체를 표현한다. 이러한 라 이다 기술은 1960년대 초반부터 최근까지 문화유산조사 (Guidi et al., 2004; Lamberts et al., 2007; Gonzalez- Aguilera et al., 2009; Sharaf et al., 2009), 토목공학 (Gonzalez-Aguilera et al., 2008), 지질학(Buckley et al., 2008), 지형학(Armesto et al., 2009) 등 다양한 분 야에 사용되고 있다(Bellian et al., 2005).
최근에는 인력에 의한 육안조사에 의한 구조물 진단, 점검 및 유지관리가 불가능한 장대교량, 해저터널과 같 은 구조물이 증가하고 있다. 이러한 인력의 접근이 불가 능한 구조물의 효과적인 점검, 유지관리를 위해 비접촉 식의 구조물 점검방안이 요구되고 있다. 그러므로 단시 간에 고정밀의 데이터를 수집할 수 있는 레이저스캐너 를 이용한 점검 및 유지관리는 인력접근의 한계성이 있 는 구조물의 효과적인 관리방법이라 판단된다.
레이저스캐너의 측정방식
레이저스캐너의 측정방식에는 시간차방식(Time-of Flight, TOF) 과 삼각측량방식 또는 위상측정방식 (Triangulation Method) 이 있다. 그 중 시간차방식은 펄 스 레이저(pulsed laser)를 대상물 표면까지 전송한 후 표면에서 부딪쳐 반사, 산란, 투과, 굴절 등이 일어난 뒤 수신기로 돌아오는 일부 반사된 빛의 시간과 빛의 속도 를 이용하여 대상물까지의 거리를 계산, 위치를 결정하 는 방법이다. 이런 유형의 스캐너들은 Cyra Techno- logies, Callidus Precision Systems GmbH and Riegl Laser Measurement Systems GmbH, Optech System 이 해당된다(David et al, 2001). 시간차방식의 거리측정 원리는 다음 식 (1)과 같다.
p 1 (1) 2 ---cΔt
=
where, c = the speed of light
Δt = the flight time of the pulse.
ρ = the range
삼각측량방식 또는 위상측정방식은 레이저를 대상물 에 발사한 후 광전소자(CCD)에 맺히는 반사 빔의 위치 를 삼각측량법으로 역산하여 위치를 결정하는 방식이다.
Fig. 1 은 시간차방식과 삼각측량방식 측정원리를 나타낸 것이다.
삼각측량방식 또는 위상측정방식은 정확도와 해상력 이 높은 반면에 전체 건물외관이나 큰 대상물을 효과적 으로 측정하는 데에는 한계를 가지고 있으며(David et al, 2001), 시간차방식과 달리 단거리용이다. 본 연구에 서는 도로하단부에 위치한 수로터널, 일반 건물의 벽체 구조물 등 건물외관이나 큰 대상물의 점군데이터 취득 에 효과적인 시간차방식을 이용한 Riegl사의 VZ-400 모 델을 사용하여 연구를 수행하였다.
연구방법 운영 레이저스캐너
VZ-400 모델은 시간차방식의 스캐닝 방법을 사용하 는 스캐너로써 스캔속도는 최대 122,000 meas/sec이다.
스캔측정범위는 최소 1 m에서 최대 600 m로 측정범위 가 넓은 것이 특징으로 Field-of-View는 수평 360°, 수 직 60°이다. 또한, 5 mm의 높은 정확도를 가지며, 외장 카메라의 지원으로 스캔 작업 중 고해상도 이미지를 획 득하여 점군데이터를 컬러이미지와 병합하여 점군데이 터의 컬러화가 가능하다. 또한, 물체의 반사강도를 2가 지타입(Amplitude, Reflectance)로 표출이 가능하다.
Table 1 은 VZ-400모델의 제원을 나타낸 것이다.
데이터 취득
레이저스캐너의 반사강도를 이용한 구조물의 변상탐 지를 위해 건물 옥상 벽체와 도로하단부에 위치한 수로
Fig. 1. Laser scanner triangulation method and time-of flight theories (http://www.pepperl-fuchs.com/).
Table 1. VZ-400 scanner performance (http://www.riegl.com).
Scanner performance
Vertical (line) scan Horizontal (frame) scan
Scan angle range total 100o (+60o/-40o) max, 360o
Scanning mechanism rotating multi-facet mirror rotating head
Scan speed 3 line/sec to 120 line/sec 0o/sec to 60o/sec
Angular step width 0.0024o≤ Δϑ ≤ 0.288o 0.0024o≤ Δϕ ≤ 0.5o Angle measurement resolution better 0.0005o (1.8 arcsec) better 0.0005o (1.8 arcsec) Inclination sensors integrated, for vertical scanner setup position
GPS receiver integrated, L1, with antenna
Compass optional, for vertical scanner setup opsition
Internal sync timer integrated, for real-time synchronized time stamping of scan data Scan sync (optional) scanner rotation synchronization
터널 등 누수, 백태, 박리가 발생된 현장에 레이저 스캐 너를 설치하여 데이터를 수집하였다. 스캐닝 시 각 현장 마다 효율적인 해상도(point to point 간격: 약 2 mm 내외)를 설정하고, 대상체와의 거리 10 m 이내에 스캐 너를 설치한 후 점군데이터를 취득하였다. 스캐너 현장 설치 후 데이터 취득까지 약 10~15분 정도가 소요되었 으나, 이는 레이저스캐너와 카메라와의 보정 작업을 포 함한 시간으로 실제 정밀 스캐닝 수행에 소요된 시간은 2 분 미만이다.
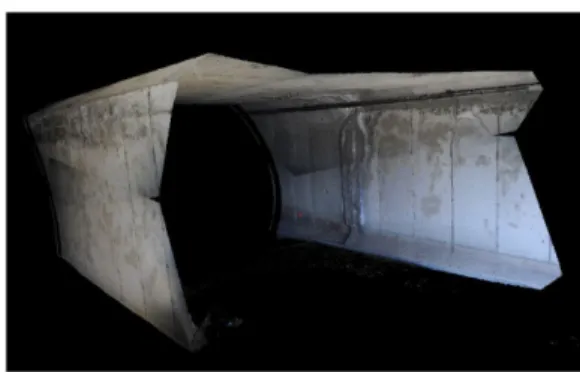
도로하단부에 위치한 구조물은 규격 2.0 m × 2.5 m, 총연장 39.0 m의 수로터널이다(Fig. 2). 스캐닝 점군자료 획득을 위해 천정부 범위까지 스캐닝이 가능하도록 스 캐너 마운트의 각도를 90°로 고정한 후 스캐닝 작업을 수행하였다. 콘크리트 건축물의 벽면은 15년 이상 된 철 근콘크리트 구조물의 옥상부(Fig. 3)를 선정하였다. 대상 벽체는 외부노출에 의한 박리, 백태와 같은 변상이 다양 하게 발생하였으며 특별한 보수흔적은 없었다.
변상현상에 대한 자료 취득을 위해 구조물의 벽면 중 변상현상이 다수 발생한 벽체를 5.0 m × 3.0 m 범위로 선정하여 스캐닝을 수행하였다. 도로하단부의 수로터널 과는 달리 평면 스캐닝만으로도 데이터 수집이 가능하 여 스캐너 마운트의 각도를 0°로 설치한 후 스캐닝하였 다. 대상체의 정밀 스캐닝 범위를 설정하기 위해 1차적 으로 전체 스캐닝(overview) 작업을 수행하였으며, 2차 적으로 선정된 구간 스캐닝을 위해 수평, 수직각을 설정 하여 정밀 스캐닝을 실시하는 방법으로 데이터를 취득 하였다. 정밀스캐닝 작업과 더불어 점군데이터의 컬러병 합을 위한 고해상도 이미지 촬영도 각각의 현장마다 추 가적으로 실시하였다. Fig. 4와 Fig. 5는 레이저스캐너의 마운트를 0°와 90°로 설정한 모습과 스캔앵글을 나타낸 것이다.
자료처리
대상체 구간 중 변상구간의 신뢰성 있는 분석을 위해 Riegl 사의 레이저스캐너 전용프로그램인 Riscan Pro를 이용하였다. 점군데이터의 식생 및 지장물 등 주변 환경 에 따른 노이즈 오차를 최소화하기 위해 우선적으로 불 필요한 점군을 제거해주는 클리닝작업과 파라미터 조절 을 통해 필요구간만을 추출할 수 있는 필터링 작업을 수행하였다(Fig. 6).
필터링 작업이 완료된 점군데이터는 X, Y, Z, R, G, B, I 순의 ASCII 파일로 출력, 저장하였다(Fig. 7). 출
Fig. 2. Highway underpass and aqueduct tunnel.Fig. 3. Wall-shaped concrete structure.
Fig. 4. The 0o mount position and example of scanning angle.
력된 반사강도(I)의 단위는 데시벨(dB)로서, 0에 가까울 수록 반사강도가 높은 것이다. 저장된 ASCII 파일은 백
태, 누수 등 변상현상이 일어난 부분을 Cloud Compare, Matlab software 를 이용하여 각 현상 별 샘플을 추출하
Fig. 5. The 90o mount position and example of scanning angle.Fig. 6. Filter processing of point data.
Fig. 7. Example of point data in ASCII format.
Fig. 8. Point cloud of structure.
Fig. 9. Point with color added (1).
Fig. 10. Point cloud of structure (2).
Fig. 11. Point with color added (2).
여, 샘플별 반사강도 차이를 확인, 분석하였다. 또한, 현 장에서 취득한 고해상도 컬러이미지를 이용하여 수집된 점군데이터와 병합해주어 점군데이터의 컬러화작업을 수 행하였다(Fig. 8~Fig. 11).
연구결과 건물옥상 벽체
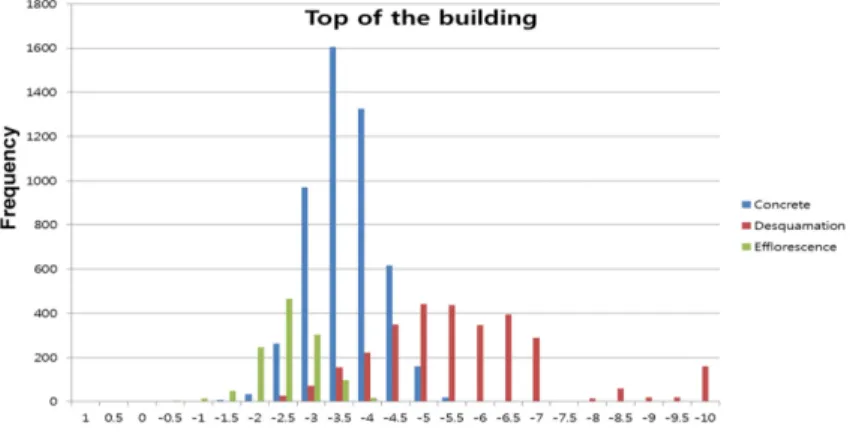
건물옥상 벽체의 경우, 옥상에 위치한 환경적 특성에 의해 외부 노출에 의한 지속적인 열화진행으로, 백태 및 박리에 의한 변상현상이 관찰되었다. 백태, 박리에 의한 변상현상은 수집된 점군데이터의 반사강도 분석결과 주 변의 정상적인 구간의 반사강도 수치에 비해 차이를 보 였다. Fig. 12는 콘크리트, 백태, 박리 등 취득된 반사강 도의 분포그래프를 나타낸 것이다.
변상현상이 없는 정상적인 벽체의 반사강도는 -3.5 ~ -4.5 dB 범위 내에 밀집되어 분포하는 경향을 보였으며, 백태현상이 발생한 벽체는 변상이 없는 벽체의 반사강 도보다 높은 수치인 -0.5 ~ -1.5 dB의 범위 내에 많이 분
포하는 것으로 분석되었다. 누수현상이 발생한 경우에는 정상부의 벽체 반사강도 수치보다 낮은 -5.5 ~ -6.5 dB의 범위 내에 많이 분포하는 것으로 나타났다. 즉, 정상부 의 콘크리트와 비교하였을 때, 백태가 발생한 콘크리트 는 반사강도가 높았으며, 박리가 발생한 콘크리트는 반 사강도가 낮은 것으로 분석되었다.
Fig. 13 은 백태가 발생한 지점 중 일부를 반사강도로 표현한 이미지(왼쪽)와 컬러이미지(오른쪽)를 비교한 것 이다. 상기 언급된바와 같이 백태가 발생한 지점의 반사 강도는 기존 정상부 벽체의 반사강도보다 높은 값을 나 타내는 짙은 붉은색으로 표출된 것을 알 수 있었다. 또 한 백태형태, 규모를 컬러이미지를 활용한 구분보다 명 확한 형태의 구분이 가능한 것으로 나타났다.
Fig. 14 는 박리 발생지점에 대한 반사강도 이미지(상) 와 컬러이미지(하)를 나타낸 것이다. 박리에 의한 변상 현상 구간은 주변부의 정상적인 구간의 반사강도보다 낮 은 반사강도를 나타냈으며, 반사강도를 이용한 이미지에 서도 주변부 변상이 없는 벽체보다 낮은 반사강도를 나 타내는 것으로 분석되었다.
Fig. 13. Comparison of efflorescence between color and reflectance images.
Fig. 12. Frequency distribution on plot.
수로터널
수로터널에서는 박리에 의한 탈락현상은 나타나지 않 았으나, 도로하단부에 위치하여 상부도로부에서 침투한 우수에 의해 벽면으로 누수 현상 및 흔적이 관찰되었다.
일부 누수가 발생한 지점에는 덧대기식의 보강이 적용 되어 있는 상태이며, 누수 발생 구간 주변으로 백태가 점진적으로 확대 진행 중인 것으로 관찰되었다.
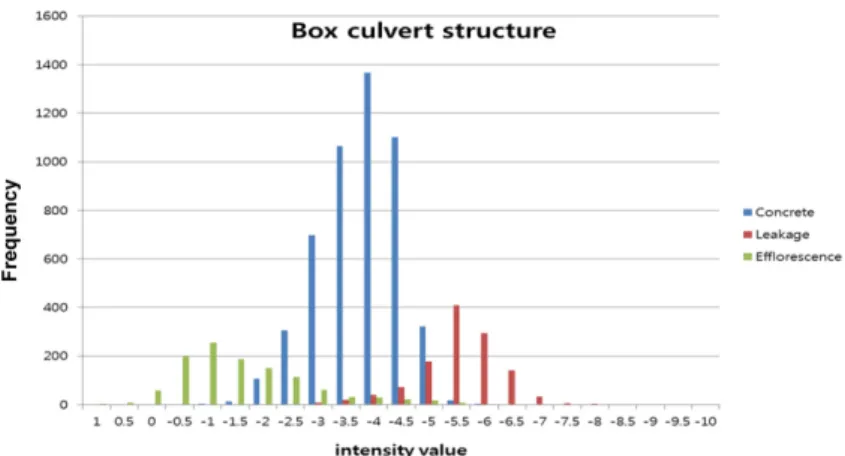
Fig. 15 는 수로터널의 변상현상이 관찰되지 않는 콘크 리트 부분, 백태, 누수현상이 발생한 구간의 반사강도 빈 도분포 그래프를 나타낸 것이다. 앞 절의 옥상건물 벽체 의 수치적 분포경향과 유사한 양상을 나타내었다. 정상 부 콘크리트의 반사강도를 기준으로 백태가 발생한 콘 크리트의 반사강도는 높았으며, 누수가 발생한 콘크리트 의 반사강도는 낮은 특징을 보였다. 이러한 수치적인 결 과는 다양한 현장 데이터를 추가적으로 수집하여 정량 적인 현상별 분류인덱스 산출과 같은 레이저스캐너의 반
사강도만을 이용한 변상유무의 분류가 가능할 것으로 판 단된다.
백태현상은 Fig. 16과 같이 백태가 일어난 중심부에 서 멀어질수록 반사강도의 수치는 낮아지는 경향이 나 타나는 것을 알 수 있었으며, 측벽 내에 3~4개소의 누 수발생 흔적이 있었다. 누수발생 구간에서는 변상이 없 는 부분의 반사강도 수치(-2.476 dB)보다 약 62.36% 낮 은 -6.579 dB로 측정되었다. 누수 발생 시점부의 반사강 도는 누수가 진행된 주변부에 비해 더 낮은 반사강도의 수치를 나타내는 경향을 나타내었다.
결론 및 고찰
본 연구에서는 레이저스캐너의 반사강도를 이용하여 구조물의 변상현상 탐지 가능성 및 객체화 가능성에 대 한 연구를 수행하였다.
Fig. 14. Comparison of desquamation between color and reflectance images.
Fig. 15. Frequency distribution on plot.