for Marine Environmental Engineering Vol. 14, No. 4. pp. 287-292, November 2011
287
영상처리기법을 이용한 내압시험체의 변형도 추정에 관한 연구
이승국†·오상우·최혁진·이승훈 한국해양연구원
A Study on the Estimation of the Deformation of Object under Hydrostatic Pressure Test Using Image Processing
S. G. Lee†, S. W. Oh, H. J. Choi and S. H. Lee KORDI
요 약
수압 환경에서 사용되는 장비들의 내압성능을 시험평가하기 위한 하나의 방법으로 정수압을 인공적으로 조성하는 고압챔버 시험설비가 사용된다. 압력에 따른 시험체의 미세한 변형도 측정에는 스트레인 게이지가 적당하지만, 게이 지의 측정 범위를 벗어난 대변형 값을 측정하기에는 적합하지 않다. 본 연구에서는 이러한 문제점을 해결하기 위한 방안으로 내압시험 중 수중카메라로부터 획득한 시험체의 영상정보를 처리하여, 수 mm 이상의 변형도를 추정할 수 있는 방법을 제안하였다. 제안된 방법은 카메라 영상을 2차원 영상처리하여 특징점을 찾고, 이 특징점의 움직임을 추적하여, 시험체의 변형도를 추정하는 방법이다. 이 방법을 이용하여 시험체 변형도를 추정하고 이를 실제 변형도 와 비교·분석하는 연구과정을 통해 수 mm 이상의 변형도를 측정할 수 있는 방법으로 사용할 수 있음을 확인하였다.
Abstract − To evaluate the pressure-resistant performance of underwater equipment, hyperbaric chamber test facility which can make the hydrostatic pressure is used. In this test, strain gage is generally applied to measure the strain of object under test is suitable for measuring a tiny deformation, but it can not measure a large defor- mation. Thus this paper suggests a method to estimate the over -order deformation of object under test by the image processing with the image acquired from underwater camera in the hydrostatic test. The main procedure of suggested method comprises the first step to find significant points by processing the image two dimen- sionally and the second step to estimate a deformation of object under test by tracking the motion of these points. If completing the remained research which is estimating the deformation and comparing it with a real one, it can be a method to measure the over -order deformation of object under test.
Keywords: Image processing(영상처리), Deformation(변형도), Depth perception(깊이인식), Hydrostatic test(내압시험), Hyperbaric chamber(고압챔버)
1. 서 론
수압 환경에서 사용되는 장비들의 내압성능을 평가하기 위한 방법으로 정수압을 인공적으로 조성하는 고압챔버 시험설비가 사 용된다. 한국해양연구원에서는 수심 6,000 m의 수압(600 bar)을 재 현할 수 있는 고압챔버 시험설비를 2010년 2월 설치하여 현재 운 용하고 있다. 본 시험설비는 내압시험 수행과정을 관찰하는 수중 카메라와 조명장치, 압력 센서, 온도 센서, 스트레인 게이지 등의
관측 및 계측 장치를 보유하고 있어, 수중구조물의 좌굴강도 실험, 수압/수밀 시험, 수중기기의 작동시험과 같은 다양한 내압시험을 수행하고 있다.
내압시험 중 시험체의 변형도를 측정하기 위해서 고압챔버 시 험설비에서는 스트레인 게이지를 이용한 측정 방법을 사용하고 있 다. 이 방법은 미세한 변형량을 측정하기에 적합하지만, 게이지의 측정 범위를 벗어난 대변형 값을 측정하기에는 적합하지 않다.
본 연구에서는 수중카메라를 통해 수집된 영상을 처리하여 수 mm 이상의 변형량을 측정하는 내압시험체 변형도 추정 방법을 제 안하였다. 영상처리기법은 공장에서의 불량 검사(김재민 등[2011]),
†Corresponding author: [email protected]
페이스(장문수 등[2011]), 카메라 보정(Zhengyou[1999]), 스테레오 비전(이기용 등[2011]), 로봇(조보호 등[2011]), 예술 분야(김태희 [2011]) 등 다양한 분야에서 활용되고 있으며, 다양하고 정밀한 기 술들이 개발되어 있다. 정밀한 기술일수록 많은 계산과정과 상당 한 소요시간이 요구된다. 하지만 내압시험체의 변형도를 실시간으 로 추정하기 위해서는 영상 처리 소요시간이 짧아야 하고, 변형량 의 정밀도가 수 mm로 그리 크지 않기 때문에 처리 속도가 빠르 면서도 효과적인 기술들을 이용하는 것이 적절할 것으로 판단되 었다. 일반적인 영상은 초당 30 프레임의 속도를 갖기 때문에(허 석 등[2011]), 한 프레임에 대한 영상 처리는 약 33 ms를 넘지 않 는 것을 목표로 하였다. 본 연구에서는 가능한 기술 중 처리 속도 가 빠른 기술을 선별하고, 이 기술들을 변형도 추정에 적합하도록 수정 보완하였다.
2. 변형도 추정
내압시험체의 변형도를 추정하기 위한 영상처리는 3단계로 구 분하여 수행하였다. 첫 번째 단계는 카메라 렌즈의 영상 왜곡을 보정하는 단계이고, 두 번째 단계는 변형을 감지하기 위한 시험체 의 특징적인 부분을 추출하는 과정이며, 세 번째 단계는 추출된 특징점에 대한 변형량 및 변형도를 추정하는 단계이다.
2.1 변형도 추정 시스템의 구성
영상처리기법을 이용한 변형도 추정 방법을 적용하고 검증하기 위해 변형도 추정 시범 시스템을 구축하였다. 구축된 시스템은 Fig.
1과 같이 고압챔버 시험설비, 카메라, 영상 분배기, 영상 레코더, 모니터, 영상 캡쳐 보드, 변형도 추정 프로그램 그리고 내압시험 체로 구성된다.
카메라는 DeepSea의 Multi SeaCam 1055 모델을 사용하였으 며, 렌즈의 초점거리는 2.8 mm이고, 조리개 값은 f2.8이다. 카메라 영상의 해상도는 가로 704 픽셀, 세로 480 픽셀이다. 이 카메라는 고압챔버 시험설비 내부에 설치되며, 내압 시험 중인 시험체의 영 상을 영상 분배기로 전달한다. 전달된 영상은 다시 영상 분배기에 의해 영상 레코더와 캡쳐 보드에 전달되고, 영상 레코더는 영상을
된 영상을 변형도 추정 프로그램에 전달하고 이 프로그램을 통해 변형도 추정작업이 수행된다. 변형도 추정 프로그램은 Visual Studio 2008의 C++언어와 OpenCV 라이브러리를 이용하여 구축하였다.
2.2 영상 보정
카메라의 영상은 여러 가지 요인으로 인해, 피사체의 모습이 왜 곡되어 보이는데, 이와 같은 현상의 주된 요인은 카메라 내부의 초점거리 및 영상센서의 중심 오차, 렌즈의 방사 왜곡, 렌즈와 영 상 평면의 수평 불일치 등이 있다. 이와 같은 왜곡이 존재할 경우 내압시험체의 변형도를 정확히 추정하기가 어렵기 때문에, 가장 먼저 왜곡을 제거하는 영상 보정 단계가 선행되어야 한다.
본 연구에서 사용된 수중 카메라는 초점 거리가 작기 때문에, 왜곡을 일으키는 여러 가지 요인 중에서 방사 왜곡이 가장 두드 러지게 나타난다. 카메라의 렌즈는 영상 센서의 가장자리 부근에 서 픽셀의 위치가 왜곡되는 현상을 발생시키며 이를 방사 왜곡이 라 한다. 이러한 현상으로 인해 영상이 볼록하게 보이며, 술통 (barrel) 또는 어안(fish-eye)효과의 원인이 된다. 이와 같이 왜곡된 영상은 식 (1), 식 (2)를 이용하여 보정할 수 있다(Gary and Adrian[2008]). 이 식들은 중심으로부터의 거리 r에 대한 테일러 급수의 처음 몇 개 항으로 표현한 것이다.
(1) (2) 여기에서 x, y는 카메라로 촬영한 영상에서 왜곡된 점의 위치를 나 타내고, xcorrected, ycorrected는 보정된 위치를 나타낸다.
카메라 왜곡의 정도를 파악하기 위해서 규칙적인 패턴이 있는 보정 객체를 이용하는데, 보정 객체를 이용한 영상의 경우에는 보 정된 위치인 xcorrected, ycorrected를 이미 알고 있기 때문에, 보정 객체 의 이동 및 회전을 통해 얻은 다수의 왜곡된 점을 이용하여 상수 k1, k2를 구할 수 있다. 이렇게 구해진 상수들은 보정 객체를 사용하지 않은 일반적인 영상에서도 동일하게 사용할 수 있다(Gary and Adrian[2008]).
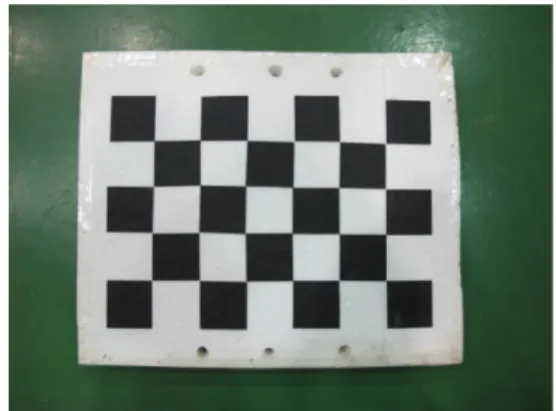
본 연구에서는 Fig. 2와 같은 체스판 형태의 보정 객체를 사용 하였다. 패턴 인식이 용이하도록 보정객체의 모든 패턴은 동일한
xcorrected=x 1 k( + 1r2+k2r4) ycorrected=y 1 k( + 1r2+k2r4)
Fig. 1. Configuration of estimating system. Fig. 2. Calibrating object.
크기로 설정하고 패턴의 가로, 세로는 모두 직선으로 설정하였다. 보 정객체를 이동 및 회전하여 다수의 영상을 얻었고, 이 영상들을 이용하여 Zhengyou[1999]의 방법으로 상수 k1, k2를 구하였다.
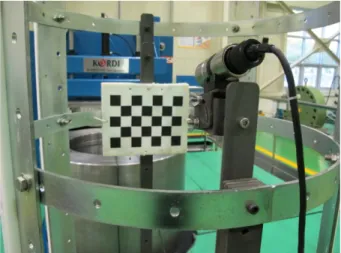
고압챔버 시험설비에서의 가압은 시험체가 위치한 챔버 내에 물을 주입하여 이루어지는데, 물의 빛 굴절률이 공기와 다르기 때 문에 수중에서 보정 작업을 진행하였다. Fig. 3과 같이 보정객체 를 고압챔버 시험용 케이지에 고정시키고, 전면에 카메라를 배치 한 후, 이 케이지를 물이 차 있는 챔버 내부에 넣어서 영상을 취 득하였다.
보정 작업의 결과는 Fig. 4와 Fig. 5와 같다.
Fig. 4는 왜곡을 보정하기 전의 영상이다. 영상의 가장자리는 왜 곡의 정도가 크기 때문에 보정객체의 윗선과 왼쪽 옆선이 곡선이 고 가운데가 불룩한 형태로 왜곡되어 나타난다. Fig. 5는 왜곡을 보정한 후의 영상이며, 보정객체의 윗선과 왼쪽 옆선이 직선에 가 까운 형태로 보정된 것을 알 수 있다. 보정된 영상의 직진도를 보 기 위해 보정객체의 윗선의 양 끝단을 직선으로 연결한 후 이 직 선과 최대로 먼 지점의 거리를 측정하였다. 보정 전의 영상은 거 리가 9 픽셀이었고, 보정 후의 영상은 거리가 4 픽셀이었으며, 보 정 후의 영상이 직진도가 향상되었음을 알 수 있었다.
2.2 특징점 추출
내압시험체의 변형도를 추정하기 위해서 영상의 모든 부분을 감시하는 것은 많은 계산 과정과 시간이 요구되기 때문에, 본 연 구에서는 한정된 수의 특징되는 점만을 지정하여, 그 특징점의 변 화를 검출하는 방법을 사용하였다.
영상처리를 통한 차량 감시나 물건 검수와 같은 경우의 특징점 추출은 임의로 마커를 추가할 수 없어, 고유의 특징점을 추출하는 과정이 필요하고 정확도를 높이기 위해 많은 계산 과정이 요구된 다. 반면, 대부분의 내압시험체는 단색이거나 단순한 색으로 표면 이 처리되어 있어 고유의 특징점을 추출하기 어렵지만, 마커를 임 의로 추가할 수 있어, 차량 감시나 물건 검수의 경우보다 추출이 용이하였다.
내압시험체의 특징점 추출은 특정색을 이용하여 추출하는 방법 과 템플릿 매칭을 이용하여 추출하는 방법의 2가지 방법을 사용하였다.
특정색을 이용한 특징점 추출법은 Fig. 6과 같이 내압시험체의 표면에 다른 부분과 구별되는 특정색으로 표시를 하여, 내압시험 중의 영상에서 표시된 색을 특징점으로 분리해 내는 방법이다. 특 정색은 빨간색, 녹색, 파란색을 사용하는 것이 유리한데, 이는 일 반적인 영상이 언급된 3가지 색으로 표현되며, 영상은 각 색을 표 현하는 독립된 채널로 구성되어, 이 3가지 색을 사용하는 것이 영 Fig. 3. Experimental setup for calibration.
Fig. 4. Camera image before calibration.
Fig. 5. Camera image after calibration.
Fig. 6. Object marked with a specific color.
상을 분리하기에 용이하기 때문이다(강동중 등[2003]).
특징점은 Fig. 6과 같이 특정색으로 파란색을 사용하였으며, 추 출 및 추적을 용이하게 하기 위해 일정한 간격으로 배치하였다.
Fig. 6의 영상에서 특징점을 추출하기 위해 Fig. 7과 같이 파란 색 채널을 분리하였다. Fig. 7을 보면 마커뿐만 아니라 대부분의 나머지 영역도 표현되어 있는 것을 볼 수 있다. 이는 영상에서 색 을 표현할 때 3가지 색을 조합하여 구현하기 때문에, 파란색이 아 닌 부분에도 파란색이 조합되어 있어, 파란색 채널에 나머지 영역 이 표현되는 것이다. 한편, 파란색 부분은 빨간색과 녹색이 적게 조합되어 있기 때문에, 식 (3)과 같이 파란색 채널에서 빨간색과 녹색 채널 값을 빼주면 파란색 영역만 남게 된다. 식 (3)의 R은 결 과 영상을 나타내고, Blue, Red, Green은 각각 파란색, 빨간색, 녹 색 채널을 나타내며, x, y는 픽셀의 위치를 나타낸다. 파란색 영역 만 남은 영상을 주어진 임계값(본 영상에서는 임계값으로 0.1 사 용하였고, 임의로 0~1까지 변경할 수 있도록 함)에 의해 이진화를 수행하여, Fig. 8과 같이 특징점을 추출하였다.
R(x, y) (3)
특정색을 이용한 특징점 추출 방법은 단순히 채널을 분리하고 감산을 하는 정도의 복잡하지 않은 과정을 거치기 때문에 추출 소 요 시간이 짧다. 소요 시간은 마커가 12개일 경우에 약 5 ms로 측 정되었다. 측정은 Intel core2 Quard 2.4GHz CPU, RAM 4GB의
PC에서 측정하였다. 하지만 이 방법은 광원 및 시험체의 반사도 에 따라 제약을 받는 단점을 갖는다. 즉 광원이 너무 어둡다면 특 정색이 잘 표현되지 않고, 광원이 너무 밝고 시험체의 반사도가 높아도 역시 특정색이 잘 표현되지 않아 추출이 용이하지 않게 된다.
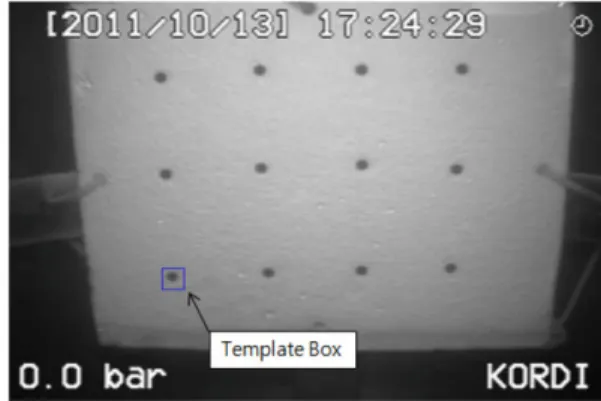
템플릿 매칭을 이용한 추출 방법은 Fig. 9와 같이 사용자가 하 나의 마커를 템플릿으로 설정하면, 영상 전체 영역에서 템플릿과 모양이 비슷한 부분을 찾아 이 부분을 특징점으로 지정하는 방법 이다. 템플릿의 크기는 마커의 크기가 상황에 따라 다를 수 있으 므로, 사용자가 임의로 설정할 수 있도록 하였다. 템플릿 매칭 방 법은 제곱차 매칭 방법, 상관관계 매칭 방법, 상관계수 매칭 방법 등이 있으며, 본 연구에서는 식 (4)의 상관계수 매칭 방법을 사용 하였다(Gary and Adrian[2008]). 여기에서 I는 입력 영상, T는 템 플릿, R은 결과 영상을 나타내며, x, y는 픽셀의 위치를 나타낸다.
(4) Fig. 10은 상관계수 매칭 방법을 이용하고, 이진화 과정을 거쳐 특징점을 추출한 결과이다. 소요시간은 마커가 12개일 경우에 약 410 ms로 측정되었다. 측정 시스템은 특정색을 이용한 특징점 추 출 방법과 동일한 시스템을 사용하였다. 템플릿 매칭을 이용한 특 징점 추출 방법은 특정색을 이용한 추출 방법보다 속도가 느리지
Blue x y( , ) Red x y– ( , )–Green x y( , ) 0 if R x y( , ) 0<
⎩⎨
⎧
R x y( , )
T x′ y′( , ) T x′ y′– ( , )
( ) I x x′ y⋅( ( + , +y′) I x x′ y– ( + , +y′))
[ ]2
x′ y′,
∑
T x′ y′( , )
x′ y′∑, 2 I x x′ y( + , +y′)
x′ y′∑, 2
---
= Fig. 7. Blue channel of object image.
Fig. 8. Detection of significant color points.
Fig. 9. Template box.
Fig. 10. Detection of significant points.
만, 색이 제대로 표현되지 않은 환경에서도 특징점을 추출할 수 있다는 장점을 갖는다.
특정색과 템플릿을 이용하여 특징점을 추출한 결과인 Fig. 8, Fig. 10은 넓이를 갖는 면으로 이루어져 있다. 하지만, 변형량 추 정은 점의 변화를 검출하여 추정하는 것이기 때문에, 점으로 변환 하는 과정이 필요하다. 변환 방법은 면에 대한 적합 기법(Fitzgibbon and Fisher[1995])을 통해, 특징점과 가장 근접한 타원체를 구하고, 이 타원체의 중심을 특징점으로 사용하는 방법을 이용하였다.
2.3 변형도 추정
내압시험체의 변형도를 추정하기 위해서는, 검출된 특징점들의 위치 변화량을 알아야 한다. 즉 내압시험을 수행하는 동안 특징점 의 이동을 추적하여 위치 변화량를 측정하고, 이를 통해 변형도를 계산할 수 있다.
특징점의 이동을 추적하기 위해 본 연구에서는 블록 매칭 기법 (Huang and Zhuang[1995], Beauchemin and Barron[1995])을 이 용하였다. 이 방법은 영상의 현재 프레임에서 검출된 특징점이 다 음 프레임에서 어느 위치로 이동하는지를 찾는 방법이다. 이동된 위치를 판단하기 위해서 블록 매칭 기법에서는 특징점을 중심으 로 하는 일정 크기의 사각 블록을 설정하고, 블록 주변에 같은 크 기의 블록을 설정한 후, 원위치의 블록과 주변 블록의 유사도를 평가하여 유사도가 가장 높은 위치를 이동 위치로 판단한다. 유사 도 평가는 일반적으로 평균 절대값 차이(MAD: Mean Absolute Difference)를 사용한다. t번째 프레임 It에서 좌표 (k, l)에 M×N 크 기의 블록이 있다고 가정하면, 이 블록과 t+1 번째 프레임 It+1에서 좌표 (k+x, l+y)에 위치한 블록과의 평균 절대값 차이는 식 (5)와 같이 계산된다(황석규[2007]).
MAD(k,l)(x,y) = (5)
이와 같이 계산된 주변 블록들의 MAD값 중 가장 작은 값을 갖 는 블록의 위치가 이동 위치가 된다.
하지만, 식 (5)를 이용하면 현재 프레임과 다음 프레임만을 비 교하기 때문에, 초기에는 특징점의 추적 성능이 좋지만, 시간이 흐 름에 따라 최초 특징점의 형태와 전혀 다른 형태가 추적될 수 있 는 가능성이 있었고, 일부 특징점은 전혀 다른 위치로 발산하는 경향을 보이기도 하였다.
추적 성능을 높이기 위해서 본 연구에서는 현재 프레임과 다음 프레임을 비교하는 동시에, 최초 프레임과 다음 프레임을 비교할 수 있도록 식 (5)를 수정하여 식 (6)과 같이 유사도를 계산하였다.
여기에서 I0은 최초 프레임을 의미하며, k0, l0은 최초 특징점의 위 치를 의미한다.
MAD(k,l)(x,y) = (6)
블록 매칭 기법을 이용하여 Fig. 9의 시험체를 가압하면서 특
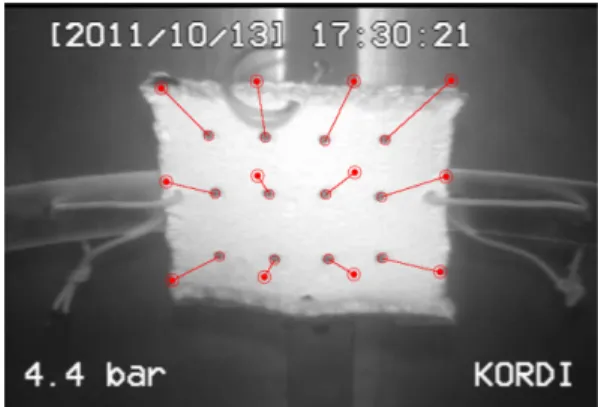
징점의 위치를 추적해 보았다. 각각 약 4 bar, 14 bar의 압력을 가 했을 때의 영상을 Fig. 11, Fig. 12에 나타내었다.
Fig. 11과 Fig. 12에서 중복원( )으로 표시된 위치는 최초 프 레임(0 bar)에서의 특징점 위치를 가리키며, 원(○)으로 표시된 위 치는 현재 프레임(4 bar와 14 bar)에서의 특징점 위치를 나타낸다.
두 영상을 포함한 시험의 전 과정에서 특징점의 위치를 정확히 추 적하고 있었고, 이를 통해 특징점 이동 추적이 적절히 수행됨을 알 수 있었다.
일반적인 영상은 초당 30 프레임의 속도로 재생된다. 그러므로 한 프레임의 모든 특징점의 위치를 추적하는데 소요되는 시간은 약 33 ms를 넘지 않아야 한다. 블록 매칭 기법을 이용하여 Fig. 9 와 같이 12개의 특징점을 추적하는데 소요되는 시간은 약 3 ms로 측정되었다. 특징점 추출은 최초 영상에서만 한번 실행하며, 내압 시험 중에는 추출 과정을 수행하지 않기 때문에 소요시간에는 포 함하지 않았다. 측정 시스템은 특정색을 이용한 특징점 추출 방법 과 동일한 시스템을 사용하였다. 이와 같은 소요 시간은 일반적인 영상 속도와 비교하여 충분히 빠른 속도이며, 블록 매칭 기법이 위치 추적 방법으로 사용하기에 적절할 것으로 판단되었다.
내압시험체의 변형도는 특징점 중 가장 멀리 떨어진 두 점 사 이의 거리를 이용하여, 최초 프레임의 거리에 대한 현재 프레임의 거리 비율로 계산하였다. Fig. 9의 시험에서 시간에 따른 압력과 시험체의 변형도는 Fig. 13과 같다.
시험 도중에는 실물의 길이를 측정할 수 없기 때문에, 시험 전 1
MN--- It(k i l j+, +) I– t 1+(k x i l y j+ +, + + )
j 0= N 1– i 0= ∑
M 1–
∑
1
MN--- (It(k i l j+, +) I– t 1+(k x i l y j+ +, + + ))
j 0= N 1– i 0= ∑
M 1–
∑
Fig. 11. Estimation of object deformation at 4 bar.
Fig. 12. Estimation of object deformation at 14 bar.
의 시험체와 시험 종료 후의 시험체의 길이를 측정하여 변형도 추 정량과 비교해 보았다. Fig. 9의 시험에서는 최초 영상의 두 점간 거리는 343픽셀이고, 마지막 영상의 거리는 327픽셀로 나타났으 며, 변형도는 약 4.7%였다. 실제 내압시험체의 변형도를 측정한 값은 약 4.4%로 나타났다. 시험체의 최초 두 점간의 실제 길이는 207 mm이었다. 최초 영상의 거리인 343픽셀을 207 mm라고 하면, 마 지막 영상의 거리인 327픽셀은 약 197 mm로 환산할 수 있다. 시 험체의 최종 두 점간의 실측 길이는 약 198 mm이었으며, 추정치 와 약 1 mm의 오차가 발생하였다. 이와 같은 오차를 고려해보면, 제안된 방법은 스트레인 게이지로서 측정하기 어려운 수 mm 이 상의 변형도 추정에 사용할 수 있을 것으로 판단된다.
3. 결 론
본 연구에서는 영상처리기법을 이용하여 내압시험 중 시험체의 변형도를 추정하기 위한 연구를 수행하였다. 변형도 추정은 3단계 로 구분되며, 연구 내용은 아래와 같다.
① 영상 보정 단계에서는 카메라의 방사왜곡을 보정 객체를 이 용하여 보정하였다.
② 특징점 추출 단계에서는 특정색을 이용한 방법과 템플릿 매 칭을 이용한 2가지 방법으로 특징점을 추출하였다. 특정색을 이용 한 방법은 속도는 빠르지만 색 구현이 용이한 제한된 환경에서만 사용할 수 있으며, 템플릿 매칭은 속도는 다소 느리지만 대부분의 내압시험 환경에서 사용할 수 있었다.
③ 변형도 추정 단계에서는 특징점의 이동을 추적하기 위해 블 록 매칭 기법을 사용하였으며, 기존 식을 변형하여 추적 성능을 향상시켰다.
이와 같이 영상처리기법을 이용하여 변형도를 추정하였고, 추 정한 결과값과 내압시험체의 실측 결과값을 비교한 결과 1 mm의 오차를 나타내었다. 1 mm의 오차를 고려해보면, 제안된 방법은 스 트레인 게이지로서 측정하기 어려운 수 mm 이상의 변형도 추정 에 사용할 수 있을 것으로 판단된다.
본 연구는 한국해양연구원에서 주요연구사업으로 수행하고 있 는 “심해 내압구조물의 내압성능 향상 및 시험평가 기술 개발”사 업의 연구결과 중 일부임을 밝힌다.
참고문헌
[1] 강동중, 하종은, 2003, Visual C++을 이용한 디지털 영상처 리, 사이텍미디어, pp.341-350.
[2] 김재민, 류호진, 2011, 다수의 고유 공간을 이용한 주화 표면 품질 진단, 한국콘텐츠학회지 제11권 제3호, pp.18-25.
[3] 김태희, 2011, 옵티컬 플로우와 마스킹에 의한 실시간 인터렉티 브 비디오 개발, 한국콘텐츠학회지 제11권 제6호, pp.98-105.
[4] 김형진, 서광덕, 2010, MRI 영상의 3차원 가시화를 통한 영 상 불균일성 보정 기법, 한국해양정보통신학회지 제14권 제4 호, pp.948-958.
[5] 안성진, 이관희, 권구락, 김남형, 고성제, 2007, 중요지역 보 안을 위한 조명환경 적응형 실시간 영상 감시 시스템, 대한 전자공학회지 제44권 제2호, pp.116-125.
[6] 이기용, 이준웅, 2011, 스테레오비전 기반의 도로의 기울기 추정과 자유주행공간 검출, 제어로봇시스템학회지 제17권 제3 호, pp.199-205.
[7] 장문수, 곽선동, 강선미, 2011, 제스처 인식과 센서를 이용한 프레젠테이션 제어 시스템, 한국지능시스템학회지 제21권 제4 호, pp.481-486.
[8] 조보호, 정성환, 2011, 효율적인 전처리와 개선된 하프변환을 이용한 무선 이동로봇 영상에서 직선검출, 멀티미디어학회지 제14권 제6호, pp.719-729.
[9] 허 석, 이호범, 장일영, 2011, 영상처리를 이용한 정적·동적 변위 계측과 속도·가속도 추산방식 연구, 한국소음진동공학회 지 제21권 제2호, pp.112-119.
[10] 황석규, 2007, 영상처리 프로그래밍, 한빛미디어, pp.779-780.
[11] Fitzgibbon, A.W., Fisher, R.B., 1995, A buyer’s guide to conic fitting, Proccedings of the 5th British Machine Vision Confer- ence, pp.513-522.
[12] Gary Bradski, Adrian Kaehler, 2008, Learning Open CV, O’Reilly, pp.214-219, 370-404.
[13] Beauchemin, S.S., Barron, J.L., 1995, The computation of opti- cal flow, ACM Computing Surveys 27, pp.433-466.
[14] Huang, Y., Zhuang, X.H., 1995, Motion-partitioned adaptive block matching for video compression, International Conference on Image Processing, vol 1, pp.554.
[15] Zhengyou Zhang, 1999, Flexible Camera Calibration By View- ing a Plane From Unknown Orientations, Proceedings of the 7th International Conference on Computer Vision, pp.666-673.
2011년 10월 13일 원고접수 2011년 11월 10일 심사수정일자 2011년 11월 15일 게재확정일자 Fig. 13. Estimation of object deformation rate.