<학술논문> DOI:10.3795/KSME-A.2010.34.11.1613 ISSN 1226-4873
고진공 환경중 고출력 초음파 모터 이송 스테이지의 나노미터 위치 제어
김완수* · 이동진* · 이선규*†
* 광주과학기술원 기전공학과
Nano-Positioning of High-Power Ultrasonic Linear Motor Stage in High- Vacuum Environment
Wan-Soo Kim*, Dong-Jin Lee* and Sun-Kyu Lee*†
* Dept. of Mechatronics, Gwangju Institute of Science and Technology, (Received May 3, 2010 ; Revised August 9, 2010 ; Accepted September 3, 2010)
1. 서 론
최근 고진공 환경중 위치제어 시스템이 조명 되고 있다. 진공환경은 마이크로 나노 미터 수준의 측정 장비나 제조 공정에 중요한 환경이다.(1) 일반적으로 원자 단위 구조물의 측정은 진공환경에서 이루어진다. 전자 현미경과 X-ray analyzer 등은 장비의 고성능을 위해 고진공
환경이 유지 되어야 한다.(2) 또한 반도체 공정을 통한 마이크로 나노 미터 수준의 제조 공정에는 정밀 웨이퍼 스테이지가 필요하다. 일반적으로 반도체 공정 중 하나인 리소그라피를 위한 웨이퍼 스테이지는 고진공 환경중에서 초정밀 위치제어와 안정적인 구동성능을 요구한다.(3)
많은 위치제어 시스템에 응용되었던 전자기 방식의 모터는 앞서 언급한 진공 중 초정밀 제어에 적합하지 않은 시스템이다. 전자기식 회전 모터의 경우 회전 운동을 선형 운동으로 변환하기 위해 볼스크류 방식등의 복잡한 변환 메커니즘이 필요한데, 이를 Key Words : Ultrasonic Linear Motor(초음파 리니어 모터), Vacuum Environment(진공 환경), Contact Stiffness(접촉
강성) , Frequency Matching (주파수 매칭), Friction(마찰)
초록: 본 연구는 고진공 환경중 초음파 리니어 스테이지의 나노미터 위치제어를 기술하고 있다. 고진공 환경 중 초정밀 위치 제어 시스템에 응용하기 위해 3 차 종진동 모드와 6 차 횡진동 모드를 가지는 BLT 를 개발 했다. 안정적인 고출력을 위해 BLT 는 하나의 공진 주파수로 두 개의 모드 진동을 발생 시켜야 한다. 하나의 공진 주파수를 이용 하기 위해 어드미턴스를 변화시켜 각 모드의 공진 주파수를 일치시켜 조건이 다른 대기 환경에서 안정적인 고출력을 얻을 수 있었다. 기압 변화에 따라 구동 특성이 달라지는 시스템을 제어하기 위해 마찰력 변화에 따른 비선형 특성을 보상한 NCTF 제어를 사용했다.
설계된 제어기를 이용해 고진공 환경에서 시스템을 나노미터 정도로 제어하는 결과를 얻을 수 있었다.
Abstract: In this paper, the ultraprecision positioning control of an ultrasonic linear motor in a high-vacuum environment is presented. The bolt-clamped Langivin type transducer (BLT) with the 3rd longitudinal; and 6th lateral vibration modes was developed, which was excited by using the Eigen resonance frequency for two vibration modes in order to generate stable and high power. In practical applications, however, even if a geometrical design has an Eigen frequency, discordance between both mode frequencies can be generated by the contact mechanism and because of manufacturing errors as well as environmental factors. Both mode frequencies were precisely matched by adjusting the impedence. By using this method, the BLT can be driven under any environmental conditions. The nominal characteristic trajectory following(NCTF) control method was adopted to control the positioning of the system in vacuum. The developed linear motor stage show high positioning accuracy with 5 nm.
† Corresponding Author, [email protected]
© 2010 The Korean Society of Mechanical Engineers
발생한 열을 냉각시키는 것이 매우 어려운 환경이다.
열에의한 시스템 열변형은 정밀 시스템에서 피해야할 문제다. 무엇보다도 전자기식 모터는 전자기장을 발생시키므로 전자기력에 민감한 원자단위의 측정장비나 제조장비에 사용하는 것이 어렵다.
기계 진동을 발생시켜 마찰력을 이용해서 구동하는 초음파 모터는 고속, 고응답성, 고정밀도, 비자성의 특징을 가지며, 특히 고진공 환경에서 구동이 뛰어난 모터이다.(4,5) 이중 hybrid type bolt- clamped Langevin transducer(BLT)는 압전소자가 금속 진동자 사이에 큰 예압으로 가압된 구조를 가지는 초음파 모터이다. 두 가지 진동 모드를 한 진동체에서 발생시켜 구동하는 방식을 사용하는 BLT 는 고출력 발생, 고정밀 제어가 가능한 특징을 가진다.(6)
Hybrid type BLT 는 종진동과 횡진동의 두 개의 모드 진동을 사용한다. 안정적인 고출력을 위해 BLT 는 하나의 공진 주파수로 두 개의 모드 진동을 발생 시켜야 한다. 그러나 기하학적으로 두 개의 진동모드를 하나의 주파수로 공진 시킬 수 있도록 설계해도, 가공 오차, 구동 환경, 구동 메커니즘에 의해 실제 상황에서 공진주파수의 불일치가 발생한다.(7) 본 연구에서는 공진 주파수 불일치 문제를 해결하기 위해 횡진동 모드를 발생시키는 PZT 에 가변 인덕턴스를 연결하는 방식을 사용했다.
또한 마찰계수의 변화는 모터의 출력과 정지 특성을 변화시켜 최종위치 제어에 영향을 미친다.
본 연구에서는 기압 변화에 따라 구동 특성이 달라지는 시스템을 제어하기 위해 마찰력 변화에 따른 불감대역 변화와 같은 비선형 특성을 보상한 NCTF(Nominal Characteristic Trajectory Following) 제어를 사용했다.
수학적 모델을 요구하지 않는 NCTF 제어는 제어 parameter 를 개루프 실험을 통해 얻게 되어 환경변화에 민감하며, 수학적 모델링이 매우 어려운 BLT 시스템 제어에 적합한 알고리즘이다.
본 연구에서는 진공 환경에서 변화하는 NCTF 제어 파라미터를 zero response 와 ramp response 의 개루프 실험을 통해 얻어내고 설계된 제어기를
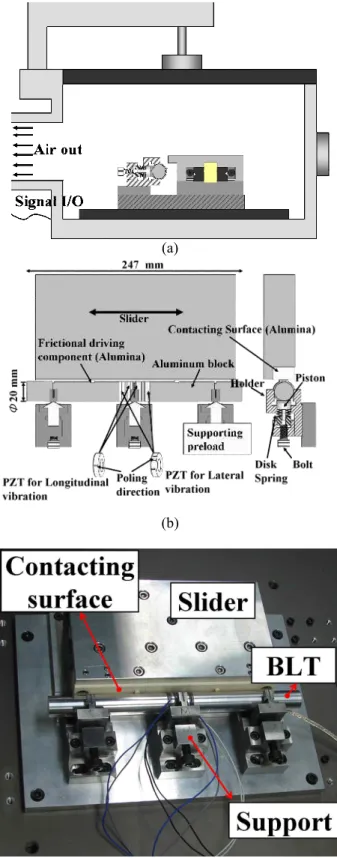
Fig. 1(a)는 Hybrid type BLT (이하 BLT) 의 구동 원리를 나타낸다. BLT 의 구동원리는 일반적인 초음파 모터와 동일하다. 고정자(stator)에 부착된 마찰 구동부(alumina tip)의 진동을 타원형태로 발생시켜 마찰력으로 이송테이블(slider)에 구동력을 발생시키는 것이다. 그림에서 나타낸 바와 같이 횡진동과 종진동의 합성 운동으로 발생된 타원궤적을 따 라 마 찰 구 동 부 가 움 직 이 면 , 마 찰 구 동 부 와 이송테이블에 부착된 마찰 표면 (frictional plate)이 접촉하게 되는데, 이때 두 표면 사이의 마찰력에 의해 이송 테이블이 움직이게 된다. 특히 BLT 는 3 차 종진동 6 차 횡진 동을 하나의 주 파수로 발생킨다(Fig. 1(b)). 두 가지 진동 모드의 위상차
(a)
(b)
Fig. 1 Operating principle of BLT
(a)
(b)
(c)
Fig. 2 (a)Experimental setup with vacuum chamber (b) Concrete system construction (c) Real image of BLT system
(θ)가 90˚가 되면 마찰구동부 에서 타원형 운동이 발생한다. 지지점(support)에 가압 되는 수직방향의 예압에 의해 발생된 마찰력이 타원 운동에 의해
Fig. 3 Total system construction with driving circuits
Fig. 4 Real image of measurement device
슬라이더(slider)를 밀면서 초음파 모터 시스템은 구동하게 된다. 이때, 횡진동과 종진동의 위상차가 90˚일 때 정방향의 구동이라면, -90˚일 때 역방향의 구동이 실현된다.
2.2 시스템 구성
Fig. 2(a)는 BLT 시스템의 진공 챔버 내의 실험장치를 보여주며, Fig. 2(b)는 BLT 시스템의 구체적인 구성 요소를 보여준다.
BLT 시스템은 Fig. 2(a)와 같은 진공 챔버에 설치 되었다. 진공 챔버는 rotary pump 와 cryo pump 를 사용하는 시스템이다. 1.0*10-3 Torr 까지는 rotary pump 를 사용하며, 그이하의 저압은 cyropump 를 사용해 5.0*10-6 Torr 까지 진공도를 유지할 수 있다.
Fig. 2(b)는 BLT 시스템 구성을 나타낸다. BLT 는 알루미늄 재질의 지름 20 mm, 길이 247 mm 인 긴 바형태를 가진 구조이다. 중간 부분의 PZT 가 압전효과를 이용해 공진주파수로 BLT 를 진동 시킨다. 두개의 진동 모드를 발생시키기위해 극화 방향(polling direction)이 다른 PZT 가 진동 모드
슬라이더의 접촉면을 마찰력으로 밀면서 슬라이더가 움직이게 된다. 마찰력은 지지부에서 가해지는 수직 방향의 예압에 의해 발생한다. 지지부는 Fig. 1 에서 보이는 3 개의 노드점에 설치 되며, 디스크 스프링(disk spring)이 볼트에 의해 가압 되면 BLT 에 예압을 주는 구조이다. Fig. 2(c)는 BLT 장비의 실제 이미지를 나타낸다.
BLT 시스템의 하드웨어가 설치된 후 이를 구동 하기 위해 Fig. 3 과 같은 구동회로를 제작 설치 했다.
포지셔닝 시스템의 위치와 속도를 측정 하기 위해 3 nm 분해능을 갖는 광학 엔코더(optical linear encoder)가 설치 되었다. 이송테이블에 linear scale 을 장착하고 He-Ne source LASER 를 이용해 테이블의 위치와 속도를 측정했다(Fig. 4).
제어기로부터 나온 입력 신호(y(t))는 구동 주파수 신호(x(t))를 이용해 진폭 변조 된다.
(AD633) 변조된 신호 중 하나는 증폭기를 통해 증폭 되어 횡진동을 진동시켰고, 다른 하나는 위상지연(phase shift)을 시켜 증폭기를 통해 증폭되어 종진동을 진동 시킨다. 위상차가 있는 두개의 신호는 독립적으로 BLT 의 진동 모드를 발생 시키고 둘의 조합에 의해 타원형 구동이 실현 된다. 타원구동에 의해 슬라이더는 움직이게 되고 슬라이더의 위치는 엔코더를 통해 측정되어 제어기로 피드백(feedback) 된다. 그리고 횡진동 모드를 발생시키기 위한 PZT 에 연결된 가변 인덕턴스(adjustable inductance)는 3 장에서 언급될 주파수 매칭을 위해 연결 되었다.
3. Hybrid type BLT 의 주파수 매칭
앞장에서 언급 했듯이, Hybrid type BLT 는 두 개의 진동 모드를 하나의 공진주파수로 발생시켜 구동한다. 알루미늄과 PZT 세라믹으로 제작된 BLT 는 기계적 Q 상수가 크므로, 공진점을 벗어난 주파수에서 구동하게 되면 큰 폭으로 진폭이 떨어지게 되어 모터 출력이 크게 낮아지는 현상이 발생한다.(7) 게다가 안정적인 구동을 하기위해서는 종진동과 횡진동의 위상차가 90˚혹은 -90˚가 유지 되어야 하는데, 비공진점에서 구동할 경우 이러한
상황에서 공진주파수의 불일치가 발생한다.(7) 본 장에서는 종진동 30.58 kHz 횡진동 30.10 kHz 의 공진주파수를 갖는 BLT 를 제작하고 두개의 진동 모드의 주파수 매칭을 실현하는 과정을 보여준다.
Fig. 5 는 BLT 구동을 위해 필요한 수직방향의 예압을 인가했을 때 종진동과 횡진동의 공진주파수의 변화를 관찰한 결과 이다. Table 1 에서 나타낸것과 같이 예압이 증가 할수록 두개의 진동 모드의 주파수가 증가함을 관찰 할 수 있다.
이 러 한 현 상 은 접 촉 강 성 에 의 해 나 타 난 다 . BLT 의 구동 요소와 슬라이더의 접촉면사이의 접 촉 강 성 이 B L T 를 구 동 하 기 위 해 가 해 진 수직방향의 예압의 증가에 의해 증가하고, 이러한
Table 1 Measurement results of resonance frequency according to preload
예압 [N] 종진동[kHz] 횡진동 [kHz]
20 α1= 30.60 β1=30.15 40 α2= 30.62 β2=30.20 60 α3=30.69 β3=30.40 80 α4=30.78 β4=31.01 100 α5=30.90 β5=31.36
Fig. 5 Measurement results of resonance frequency according to preload
강성 요소가 BLT 의 공진주파수를 높이는 결과를 가져 온다.(7) 결과적으로, 100N 의 예압이 인가되었을 때, 두개의 진동 모드 주파수의 차이는 460 Hz 가 된다.
이러한 진동 모드간의 차이를 매칭 하기 위해 2 장에서 언급된 가변 인덕턴스를 사용했다.
BLT 는 기계적 요소인 동시에 전기적 요소 이다.
전기에너지를 압전소자에 가해 기계진동을
발생시켜 슬라이더의 구동력을 발생시킨다.
그러므로 전기적 특성의 변화는 기계적 특성의 변화를 야기한다. BLT 는 Fig. 6 과 식 (1),(2)와 같이 전기적 임피던스 요소로 고려할수 있다.
( )
wa a
a R jX
Z = + (1)
( )
wb b
b R jX
Z = + (2)
Za 와 Zb 는 종 진 동 과 횡 진 동 의 임 피 던 스 요소를 나타내며. Ra,Rb는 저항 요소 Xa
( )
w ,( )
wXb 는 리액턴스 값을 의미한다. 두 개의 진동 모드가 일치하기 위해서는 식 (3)의 조건이 만족해야한다.
( )
w = b( )
w =0a X
X (3)
공진 주파수는 임피던스의 허수부가 ‘0’이 되는 점에서 정의 되기 때문이다.( 8 ) 그러나 두 개의 임피던스 요소가 완전히 같지 않다면 식 (3)을 만족하는 주파수는 존재하기 힘들다. 그러므로 본 연구에서는 횡진동을 발생시키는 PZT 에 가변 인덕 턴스 요소 를 연 결하 여 식 (2)에 해당 하는
Fig. 6 Impedance model of BLT with adjustable inductance
임피던스를 식 (4)와 같이 변화시켰다.
( )
j LmjX R
Zb¢ = b + b w + w (4)
b¢
Z 는 변화된 횡진동의 임피던스 값이며, Lm은 가변 인덕턴스의 값을 의미한다. 결과적으로 식 (3)에 해당하는 조건은 식 (5)와 같이 변한다.
( )
=Im[Z ¢(
,Lm)
]=0Xa w b w (5)
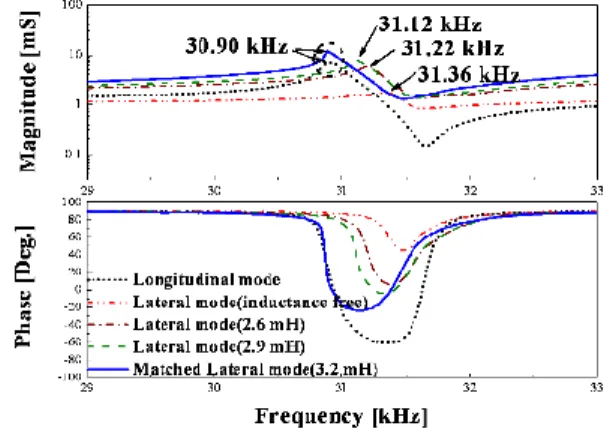
이 경우, 적절한 Lm 값을 찾으면 종진동과 횡진동을 매칭할 수 있는 주파수 w 를 찾을 수 있다. Fig. 7 는 100 N 의 예압을 준 상태에서 가변 인덕턴스 값을 변화시키며 주파수 매칭을 실현할 수 있음을 보여준다.
그림에서 보여주듯 두 개의 진동 모드는 3.2 mH 의 인덕턴스를 연결했을 때 30.90 kHz 에서 일치 됨을 확인할 수 있다.
Fig. 7 Measurement results of resonance frequency with adjustable inductance
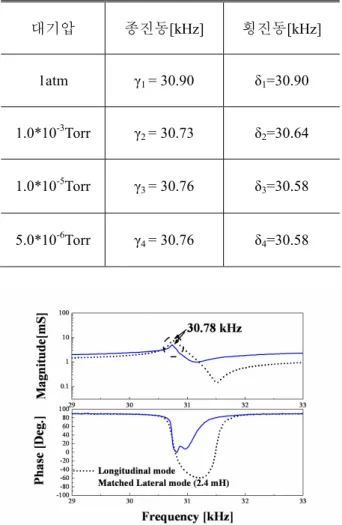
Fig. 8 Measurement results of resonance frequency according to vacuum levels
1.0*10-3Torr γ2 = 30.73 δ2=30.64
1.0*10-5Torr γ3 = 30.76 δ3=30.58
5.0*10-6Torr γ4 = 30.76 δ4=30.58
Fig. 9 Result of frequency matching in high vacuum 대기중에서 공진주파수를 일치시킨 후, Fig. 2(a) 와 같은 실험 장치에서 챔버 내의 기압을 하강시키며 BLT 의 공진주파수를 관찰했다. 기압 변동에따라 실제 접촉면에 변화가 생겨 접촉 상태가 바뀌게 되어(9) Fig. 8 과 Table 2 에서 보이는 것과 같이 공진주파수의 불일치가 다시 발생했다.
5.0*10-6Torr 대기압 조건에서 주파수 매칭하기위해 가변인덕턴스의 값을 2.4 mH 로 변화 시켰으며 그결과 Fig. 9 와 같이 30.78 kHz 로 다시 매칭 할 수 있었다.
4. 진공환경중 초정밀 제어
지금까지 정밀 시스템을 제어하기 위해 disturbance observer, time optimal controller, sliding mode controller 등의 많은 제어기가 연구되어
왔다.(10~12) 이러한 모델을 기초로 하는 제어기는
시스템의 수학적 모델링이 정확하다면, 좋은 제어 성능을 나타낸다.
Fig. 10 Contol block diagram for the BLT system 그러나 BLT 와 같은 초음파 리니어 모터는 마찰의 비선형성 그리고 dead-zone 과 같은 현상에 의해 정확한 수학적 모델링을 찾는 것이 매우 어려운 시스템이다.(13) 게다가 마찰재료로 쓰이는 알루미나 세라믹의 경우 환경 요인인 대기압에 의해 마찰계수가 바뀌므로,(14) 마찰력을 구동력으로 사용하는 초음파 모터 시스템은 대기압 변화가 시스템 특성 변화를 야기한다. 환경 변화에 따라서 바뀌는 시스템을 매번 모델링 하는 것은 비효율적이다.
본 연구에서는 모델링의 어려움과 마찰 비선형성을 극복하기 위해 NCTF (Nominal Characteristic Trajectory Following) 제어기를 도입
했다.(14,15) NCTF 제어기의 주된 장점은 모델링을
필요로 하지 않는 다는 것이며, 제어기 설계 역시 개루프 실험을 통해 얻어진 파라미터로 수행 된다는 것이다.(15,16) 그리고 이러한 간단한 제어기 구성으로 초정밀 위치제어를 달성하는 것이 가능한 것으로 보고되어있다.(15,16)
또한 초음파 모터의 비선형성 특성인 Dead-zone 을 보상하기위해 제어기에 constant offset 을 도입 했다.
Fig. 10 은 NCTF 제어 알고리즘과 constant offset 을 포함한 블록다이어 그램을 나타낸다.
4.1 Dead-zone 보상
BLT 의 출력이 슬라이더 가이드의 정지 마찰력에 비해 작은 힘으로 구동될 때, BLT 시스템은 입력 값이 존재 해도 슬라이더가 움직이지 못하는 현상이 발생하게 되는데 이를 dead-zone 이라고 한다. Dead- zone 은 초음파 모터라면 모두 갖고 있는 비선형 특성이다. BLT 의 출력이 dead-zone 영역에 들어오면 슬라이더가 정지해 목표위치에 도달하지 못해(17) 20-50 nm 의 포지셔닝 오차가 발생하게 된다.
이를 보상하기 위해 Fig. 10 에서 보이는 constant offset 을 사용했다. Constant offset 은 BLT 의 출력이
(a)
(b)
Fig. 11 (a)Ramp response of BLT (b) Range of dead- zone according to vacuum levels
Fig. 12 Result of dead-zone compensation
dead-zone 영역에 들어왔을 때 일정 상수의 출력값을 더해 dead-zone 을 벗어날수 있게 하는 역할을 한다. Constant offset 값을 결정하기 위해 BLT 의 삼각파 신호 응답(ramp response)를 관찰 했다. Fig. 11 은 각 진공도에 따른 삼각파 신호 응답특성을 나타낸다.
그림에서 보이는 것과 같이 BLT 시스템의 응답은 출력이 작아졌을 때 dead-zone 영역에
들어가게 되고 dead-zone 의 영역 크기는 진공도에 따라서 달라짐을 확인할 수 있었다.(Fig. 11(b)) 결과적으로 진공도에 따라서 다른 constant offset 값으로 dead-zone 을 보상해야 함을 의미한다. Fig.
12 는 진공도가 5.0*10-6 Torr 이고, 모터 입력 신호 영역이 -2V~2V 일 때 정방향의 constant offset 을 0.248V 역방향의 constant offset 을 0.342 V 를 입력하여 dead-zone 을 보상한 삼각파 응답특성을 나타낸다.
4.2 NCTF 제어기 설계
NCTF 제어기는 nominal characteristic trajectory (NCT)와 PI 보상기로 구성되어 있다. (Fig. 10) NCTF 제어기에서는 위치제어 시스템을 2 차 시스템이라고 가정한다. 초음파 리니어 모터 역시 식 (6)과 같은 2 차시스템으로 간주 할 수 있다.(18)
ufric
Ku -
= +aq a
q&& (6)
이때, q 는 변위, u 는 입력신호, ufric 은 마찰 그리고 K , a 는 BLT 시스템에 관련된 양의 상수라고 가정한다. 그리고 PI 보상기는 NCT 커브를 추종하게 하도록 제어해 NCT 커브의 원점에서 정지하도록 하는 역할을 한다. 그리고 Fig. 10 에서 보이는 up는 다음과 같이 나타낼 수 있다.
n e
up = &- (7) 이때, e&는 연산된 오차율(error rate)이며 n 은
피드백 센서에서 얻어진 속도 정보다. 시스템의 동작이 NCT 커브를 완벽히 추종했을 때, up 는
‘0’이 된다. PI 보상기는 up값을 ‘0’으로 만들기 위해 적용된 것이다. NCTF 제어기는 다음과 같은 절차에 의해 설계 될 수 있다.(15,16)
(1) 개루프 실험인 zero response 를 시행하여 속도와 변위 값을 얻는다. 본 연구에서는 진공도에 따라서 시스템 특성이 바뀌는 BLT 를 제어하기 위해 각각의 진공도에서 개루프 실험을 진행 했다. Fig. 13 은 진공도가 5.0*10-6 Torr 일때 시스템의 zero response 를 나타낸다.
(2) NCT 커브는 (1) 단계에서 얻어진 개루프 응답을 통해 얻는다. 감속구간의 변위 데이터를 수평축, 속도데이터를 수직축에 배열하면 Fig.
14 와 같은 NCT 커브를 얻을 수 있다. Fig. 14 는 진공도를 다르게 하면서 얻은 NCT 커브들이다.
a a
= + s s
G1( ) (9a)
2 2
2
2 2
) 2 (
n n
n n
s s
G zw w
w zw
+ +
= + (9b)
mh u Kp K n zwn r
a zw 2
2 =
= (9c)
mh u Ki Kn n r
2
2 w
a w =
= (9d)
이때 만일 z , wn의 값이 충분히 커서 G2(s)가
‘1’이 되어 G(s)=G1(s) 이 된다면 G1(s) 는 NCT 커브의 전달함수와 동일한 형태가 되므로 시스템 전체가 NCT 커브를 추종하는 결과가 얻게되어 최종적으로 원하는 포지셔닝을 수행하는 결과를 가져온다.(15,16)
4.3 고진공중 포지셔닝 결과
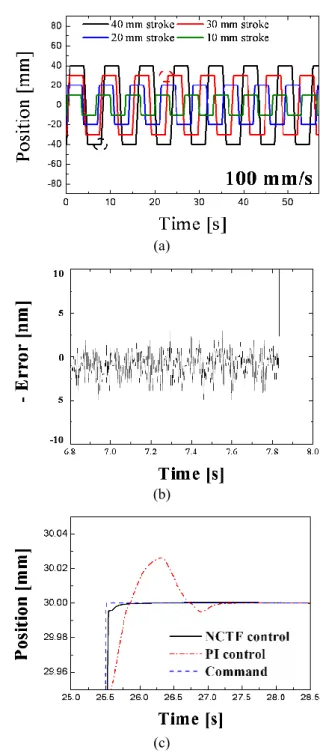
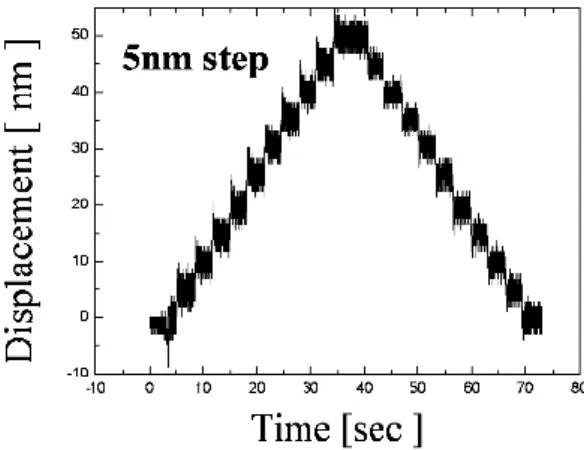
Dead-zone 보상과 NCTF 제어기 를 설 계한후 B LT 시 스 템 을 진 공 도 5. 0 *1 0- 6 T o rr 상 태 에 서 포지셔닝을 실시 했다. Fig. 15 는 BLT 시스템이 10~40 mm 의 긴 스트로크를 5 nm 수준의 최종 오차를 가지고 포지셔닝 한 결과를 나타낸다. Fig.
Fig. 14 NCT curves in different vacuum levels
나노미터 수준의 스텝 제어를 달성했다.
(a)
(b)
(c)
Fig. 15 (a) Longstorke positioning (b) final positioning error (c) overshooting and settling time
Fig. 16 Nanometer step positioning
5. 결 론
본 연구는 초음파 리니어 모터를 사용한 고 진공 중 초정밀 스테이지 제어에 관한 연구를 수행했다. 고진공 환경 중 초정밀 위치 제어 시스템에 응용하기 위해 3 차 종진동 모드와 6 차 횡진동 모드를 가지는 BLT 를 개발 했다.
Hybrid type BLT 시스템의 공진 주파수 불일치 문제를 해결하기 위해 횡진동 모드를 발생시키는 PZT 에 가변 인덕턴스를 연결하는 방식을 사용했으며.
인덕턴스의 크기를 조절해 횡진동 모드의 어드미턴스를 변화시켜 종진동 공진주파수와 일치시켜 고진공 환경에서 안정적인 고출력을 얻을 수 있었다.
기압 변화에 따라 구동 특성이 달라지는 시스템을 제어하기 위해 마찰력 변화에 따른 불감대역 변화와 같은 비선형 특성을 보상한 NCTF(Nominal Characteristic Trajectory Following) 제어를 사용했다.
진공 환경에서 변화하는 NCTF 제어 파라미터를 zero response 와 ramp response 의 개루프 실험을 통해 얻어내고 설계된 제어기를 이용해 고진공 환경(5*10-6 Torr)에서 BLT 시스템을 나노미터 정도로 제어하는 결과를 얻을 수 있었다.
후 기
이 논문은 정부의 재원으로 한국 과학재단 국가 지정연구실사업의 지원으로 수행된 연구임 (No.
20100018458)
참고문헌
(1) Morita, T., Niino, T. and Asama, H., 2002,
“Rotational Feedthrough Using Motor for High Vacuum Condition,” Vacuum, Vol.65, pp. 85~90.
(2) Morita, T., Takahashi, S., Asama, H. and Niino, T., 2003, “Rotational Feedthrough Using an Ultrasonic Motor and Its Performance in Ultra High Vacuum Conditions,” Vacuum, Vol.70, pp. 53~57.
(3) Beckert, E., Hoffmann, A. and Saffert, E., 2001,
“Development of a Vertical Wafer Stage for High Vacuum Application” Microelectronic Engineering, Vol.57, pp.207~212.
(4) Ueha, S., Tomikawa, Y., 1993, Ultrasonic Motors Theory and Applications, Oxford Science Publications, New York.
(5) Choi, B. H. and Choi, H. R., 2000, “Force / Torque Control of Ultrasonic Motor with PWM Driving Method,” Trans. of the KSME (A), Vol. 24, No. 11, pp.
2723~2731.
(6) Kurosawa, M., Yamada, H. and Ueha, S., 1989,
“Hybrid Transducer Type Ultrasonic Linear Motor”
Jpn, J. Appl. Phys., Vol.28, pp.158~160.
(7) Kim, W.S., Yun, C.H. and Lee, S.K., 2008, “Nano Positioning of a High Power Ultrasonic Linear Motor,” Jpn, J. Appl. Phys., Vol.7, pp.5687~5692.
(8) Hemsel, T. and Wallaschek, J., 2000, “Survey of the Present State of the Art of Piezoelectric Linear Motors” Ultrasonics, Vol. 38, pp.37~40.
(9) Qu, J.J., Tian, X. and Zhou, N.N., 2008,
“Characteristics of Traveling Wave Ultrasonic Motor Under Atmosphere and Vacuum Cycle Condition.,”
Vacuum, Vol.82 ,pp.1302~1305.
(10) Park, M.H. and Won, C.Y., 1991, “Time Optimal Control for Induction Motor Servo System,” IEEE Trans Power Electron Vol.6, No. 3, pp.514~524.
(11) Workman, M.L., Kosut, R.L. and Franklin, G.F., 1987, “Adaptive Proximate Time-optimal Sevomechanisms: Continuous Time Case.” In:
Proceedings of the American Motion Control conference, Minneapolis, USA, pp.589~594.
(12) Fujimoto, Y. and Kawamura, A., 1995, “A. Robust Servo-System Based on Two-Degree-of-Feedom Control with Sliding Mode,” IEEE Trans Ind Electron, Vol.42, No.3, pp.272~280.
(13) Snitka, V., 2000, “Ultrasonic Actuator for Nanometre Positioning,” Ultrasonics, Vol.38, pp.
20~25.
(14) Sasaki, S., 1989, “The Effects of the Surrounding Atmosphere on the Friction and Wear Alumina, Zirconia, Silicon Carbide and Silicon Nitride,” Wear, Vol.134, pp.185~200.
(15) Wahyudi, Sato, K. and Shimokohbe, A., 2003
“Characteristics of Practical Control for Point-to-Point (PTP) Positioning Systems Effect of Design Parameter and Actuator Saturation on Positioning Performance,”
“Precise Position Control of Ultrasonic Motor Using
![Table 1 Measurement results of resonance frequency according to preload 예압 [N] 종진동[kHz] 횡진동 [kHz] 20 α 1 = 30.60 β 1 =30.15 40 α 2 = 30.62 β 2 =30.20 60 α 3 =30.69 β 3 =30.40 80 α 4 =30.78 β 4 =31.01 100 α 5 =30.90 β 5 =31.36](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5228712.358089/4.892.465.797.661.1132/measurement-results-resonance-frequency-according-preload-종진동-횡진동.webp)