** 정회원 : 인하대학교 전자공학과(교신저자, [email protected])
** 정회원 : 인하대학교 전자공학과 접수일자 : 2012. 08. 28
심사완료일자 : 2012. 09. 12
차량사용자인증시스템을위한
향상된충돌방지알고리즘의설계및구현
김경섭* · 이윤섭** · 최상방**
The Design and Implementation of Improved Anti-Collision Algorithm for Vehicle User Authentication System
Kyeong-seob Kim* · Yun-seob Lee** · Sang-bang Choi**
이 논문은 정부(교육과학기술부)의 재원으로 한국연구재단의 중점연구소 지원사업으로 수행된 연구임(2010-0020163).
요 약
최근 자동차 산업이 눈부시게 발전하면서 운전자의 편의성과 안전성을 위해 차량에는 끊임없이 새로운 시스템 이 적용되고 있다. 이러한 시스템은 다수의 FOB 키를 사용하기 때문에 사용자 인증 시 원활한 다중 접속을 위해 충 돌방지 알고리즘을 적용시켜 사용하고 있다. 본 논문에서는 다수의 FOB 키를 사용하는 차량용 스마트키 시스템에 서 동적으로 사용자 아이디 요청 순서를 최근 사용자 아이디로 변경하여 차후 인증 과정에서의 통신 응답 소요 시 간을 획기적으로 감소시키는 향상된 충돌방지 알고리즘을 설계하고 구현하였다. 향상된 충돌방지 알고리즘이 적 용된 시스템의 성능 평가를 위해 차량에 실제 장착하여 구현된 알고리즘의 동작을 확인하였고, 다수의 FOB 키에 대한 통신 응답 소요 시간을 측정하였을 때 기존 알고리즘에 비해 약 33% 정도 감소되었음을 검증하였다.
ABSTRACT
Because many of the FOB key, anti-collision algorithm for a seamless multi-access is applied to the smart-key system. In this paper, we have designed and implemented improved anti-collision algorithm that dramatically reduces the communication response time required in the user authentication process immediately after by dynamically changing the order in which the request of the user ID as the user ID on immediately before in the smart key system for vehicles that use many of the FOB key. In order to evaluate the performance of the system the improved anti-collision algorithm is applied, we show the behavior of the algorithm implemented in the state actually mounted on the vehicle and verify that communication response time required for many of the FOB key was reduced by about 33% compared to existing algorithms.
키워드
Auto-ID, 스마트키 시스템, 다중접속 모드, 충돌방지 알고리즘, RFID
Key word
Auto-ID, Smart-key system, Multi-access mode, Anti-collision algorithm, RFID
O pen Access
http://dx.doi.org/10.6109/jkiice.2013.17.1.57
Ⅰ. 서 론
유비쿼터스 컴퓨팅 기술의 기본 프레임워크인 자동 인식(Auto-ID)은 서비스, 재고관리, 제조사 및 자재 유통 등 다양한 분야에서 보편화되어 있으며 사람, 동물, 운송 중에 있는 제품에 관한 정보를 제공하기 위해 존재하고 있다. 현재 가장 널리 사용되고 있는 자동 인식 시스템은 바코드(bar-code)로써, 아이템에 직접 또는 아이템에 붙 여질 스티커 위에 인쇄되어 리더(reader)가 읽을 수 있도 록 만든 기호 체제이다. 하지만 바코드는 비용이 저렴한 반면 저장 능력이 낮고 재 프로그래밍 할 수 없으며 접촉 식으로써 기계화된 데이터 수집만 가능하다는 단점으 로 인해 실용적이지 못한 경우가 있다. 이를 보완하기 위 해 보조의 컴퓨팅 용량을 가질 수 있는 전자적 저장 장치 인 트랜스폰더(transponder)와 판독 및 해독 장치인 리더 (reader) 간의 데이터 전송 방법인 RFID(Radio Frequency IDentification) 시스템이 실용성 및 보안성과 같은 근본 적인 문제점을 대체 할 수 있는 자동 인식 시스템으로 각 광을 받고 있다. 일반적인 RFID 시스템에서 리더가 트랜 스폰더를 인식하는 과정을 살펴보면, 리더는 모든 트랜 스폰더에게 요청메시지를 브로드캐스트(broadcast)하고 요청 메시지를 받은 트랜스폰더들은 리더에게 데이터 를 전송하게 되는데, 이 경우 하나의 리더에 많은 트랜스 폰더들이 데이터를 전송하는 다중접속(multi-access)이 이루어진다.
이와 같은 다중 접속은 리더에게 많은 트랜스폰더들 이 데이터를 전송하므로 필연적으로 데이터 충돌이 발 생하며, 충돌 발생 데이터의 인식을 위해 리더는 트랜스 폰더에게 재전송을 요청한다. 이러한 데이터 재전송 과 정은 결국 트랜스폰더 인식 시간의 증가를 유발하여 RFID 시스템의 효율성을 떨어뜨린다. 이러한 문제를 해 결하기 위해 충돌방지(anti-collision) 알고리즘이 사용되 며, 이는 다중접속 방지 시스템의 성능을 결정짓는 중요 한 요소가 된다[2∼4].
기존의 시스템을 활용한 차량용 스마트키 시스템의 전자인증은 사용자가 어떠한 동작을 하지 않아도 마치 차량 스스로 운전자를 인식하는 것처럼 차량의 사용자 인증을 가능하게 하므로 운전자의 편의성을 극대화시 켰다. 이러한 차량용 스마트키 시스템에서는 다수의 FOB 키를 동시에 사용 할 수 있다. 이때 한 대의 차량으 로 다수의 FOB 키들이 동일한 시점에 데이터를 전송하
게 되는 다중 접속이 이루어지는 경우 데이터들이 충돌 하거나 손실 될 수 있기 때문에 다중접속을 위한 충돌 방 지 알고리즘이 요구된다. 현재 개발되어 사용되고 있는 스마트키 시스템의 충돌방지 알고리즘은 시간분할 다 중접속을 이용하여 각각의 FOB 키마다 번호를 부여하 고 순차적으로 차량의 사용자 인증과 관련된 정보를 차 량에서 FOB 키로 송신하여 충돌을 회피하는 방법을 사 용하고 있다[6∼7].
이때 FOB 키의 개수가 증가 할 경우 차량 운행을 위 해 소요되는 인증 시간이 늘어나게 되는 문제점이 있 다. 또한 가장 마지막 사용자 아이디를 할당 받은 FOB 키를 사용하면 차량으로부터 항상 마지막으로 사용자 아이디 요청을 받게 되어 일정한 응답 대기시간으로 인 한 지연이 발생하는 문제점도 가지고 있다. 결과적으로 차량과 FOB 키 간의 응답 지연 시간이 증가하게 되면 사용자 아이디 인증 시간과 사용자가 문을 여는 행위가 동시에 발생하게 되는 Jam 현상이 발생하게 되어 차량 도어가 열리지 않는 문제로 인해 사용자는 불편함을 느 끼게 된다.
본 논문에서는 차량 사용자 인증 시 소요되는 지연 시간을 감소시키기 위해 스마트키 시스템의 충돌방지 알고리즘에서 동적으로 사용자 아이디 요청 순서를 최 근 사용자 아이디로 변경 할 수 있도록 차량 사용자 인 증 시스템을 위한 향상된 충돌 방지 알고리즘을 설계하 였다. 설계된 충돌 방지 알고리즘은 다수의 FOB 키가 다중 접속이 이루어지는 환경에서 차량과 FOB 키 간의 사용자 아이디 인증 지연 시간으로 인해 발생하는 Jam 현상을 효율적으로 해결한다. 통신 응답 시간에 대한 성능 평가를 위해 차량에 실제 장착하여 구현된 알고리 즘을 테스트하였고, 설계된 결과는 동적으로 사용자 아 이디 요청 순서를 최근 사용한 아이디로 변경하여 차후 인증 과정에서의 통신 응답 소요 시간을 획기적으로 감 소시켰다.
본 논문의 구성은 다음과 같다. Ⅱ장에서는 차량 사용
자 인증 시스템의 발전과정 및 RFID를 이용한 스마트키
시스템과 이에 따른 충돌 방지 알고리즘 기법에 대해 기
술하고, Ⅲ장에서는 본 논문에서 제안한 충돌 방지 알고
리즘에 대해 상세히 설명한다. Ⅳ장에서는 제안한 충돌
방지 알고리즘을 구현하고 기존의 충돌 방지 알고리즘
과의 실험을 통해 비교 분석 한 후 성능 평가를 수행한
다. 마지막으로 Ⅴ장에서는 본 논문의 결론 및 향후 연구
과제를 제시한다.
Ⅱ. 관련 연구
본 장에서는 차량 사용자 인증시스템의 특징 및 기존 연구에 대해 설명하고, 충돌방지 알고리즘의 구성과 특 징에 대해 설명한다.
2.1. 차량 사용자 인증 시스템의 발전과정
차량용 보안 장치는 자동차 산업의 초창기에 도난 방지를 목적으로 차량의 문에 도어락(Door Lock)을 설 치하면서 시작되었다. 도어락을 시작으로 차량의 보안 장치는 발전하였으며 이에 따라 새로운 형식의 차량 사 용자 인증 시스템이 개발되었다. 차량의 보안을 목적 으로 개발되어진 차량 사용자 인증 시스템은 기술의 발 전에 따라 보안성이 높은 형식의 시스템으로 개발되었 고 사용자의 편의성을 높이는 시스템과 접목되어 도난 방지 및 편의성을 모두 겸비한 시스템으로 발전하였 다.[1]
2.2. 다중 접속 기술
스마트키를 사용하는 차량인증 시스템에서는 다수 의 FOB 키를 동시에 사용할 수 있다. 일반적으로 차량에 서 다수의 FOB 키에 요청메시지를 동시에 보내고 요청 메시지를 받은 FOB 키들은 차량으로 자신의 사용자 아 이디를 전송하게 되는데, 이 경우 다수의 FOB 키들이 하 나의 차량으로 데이터를 전송하게 되는 다중접속이 이 루어진다. 이러한 다중접속이 발생할 경우 송신되는 각 각의 FOB 키들의 데이터가 서로 충돌을 일으키게 되며 충돌이 발생한 데이터에 재전송 등의 추가적인 과정이 요구된다. 데이터의 재전송 과정이 반복되면 사용자 인 증 시간의 증가 및 인식률 감소를 일으켜 스마트키 시스 템의 효용성을 떨어뜨리게 된다. 따라서 효율적인 스마 트키 시스템을 구성하기 위해서는 데이터 충돌을 최소 화 하는 동시에 충돌이 발생할 경우 오류를 효과적으로 정정할 수 있는 충돌방지 기술을 포함한 다중접속 기술 이 요구된다.
다중접속은 무선 통신 시스템에서 개별 단말기 신호 들을 분리하기 위한 목적으로 많은 방법들이 개발되어 사용되어 왔다. 이러한 방법들은 크게 공간분할 다중접
속(SDMA, Space Division Multiple Access), 주파수 분할 다중접속(FDMA, Frequency Division Multiple Access), 시간분할 다중접속(TDMA, Time Division Multiple Access), 부호분할 다중접속(CDMA, Code Division Multiple Access)으로 나눈다. 이 중에서 공간분할 다중 접속은 공간적으로 분리되어 있는 지역에서 자원을 재 사용하는 기술로써 복잡한 안테나 시스템과 구현비용 이 고가라는 단점 때문에 특정한 어플리케이션에만 사 용이 제한된다. 주파수 분할 다중접속은 여러 개의 반송 파 주파수 상에 몇 개의 채널을 형성하고 이들 채널을 동 시에 사용한다는 것을 의미한다.
이 기술은 리더기를 구성하는데 비교적 많은 비용이 필요하기 때문에 이 역시 특정된 애플리케이션에만 사 용을 제한하고 있다. 시간분할 다중접속은 전체 사용 가 능한 채널용량을 통신에 참여한 단말기들 간에 시간적 으로 나누어서 사용하는 기술로써 RFID 시스템에서 널 리 사용되는 기술이다.
시간분할 다중접속 기술과 관련된 다중태그 식별을 위한 충돌방지 알고리즘은 크게 결정적 알고리즘 (deterministic algorithm)과 확률적 알고리즘(probability algorithm)으로 구분된다. 먼저 확률적 충돌 방지 방법 은 보통 알로하(ALOHA) 알고리즘을 기반으로 하고 있 다. 알로하 알고리즘은 시간을 슬롯 단위로 나누어 태 그의 응답이 되도록 한 슬롯에는 하나의 태그만 응답하 게 하는 알고리즘이다. 하지만 이 방법은 확률이라는 불확실에 기초를 두고 있기 때문에 리더기 식별 영역 내의 모든 태그를 인식하지 못할 수도 있다. 한편 결정 적 충돌 방지 방법은 트리(tree) 생성을 기반으로 하고 있다. 이 방법의 알고리즘은 트리를 만들 때 태그의 고 유한 식별 아이디를 사용하여 트리를 만들기 때문에 모 든 태그를 인식 할 수 있고 과정을 예측할 수 있는 장점 이 있다[2].
2.3. 스마트키 시스템
스마트키 시스템은 3세대 자동차 키로 불리고 있으
며, 기계식 키를 사용하는 대신에 전자 인증방식을 통해
기존 자동차가 일반적으로 사용하는 세 가지 도난 방지
장치(도어락, 스티어링 락, 이모빌라이져)를 해제하여
차량을 운행 할 수 있도록 하는 장치를 말한다. 즉, 운전
자가 스마트키를 몸 또는 가방 등에 지닌 채 차량에 접근
하여 도어 핸들을 접촉하면 도어락이 자동으로 해제되
고, 차량의 탑승 후 차량 내부에 장착된 시동 버튼을 누 르면 암호화된 디지털 코드를 자동차와 스마트키가 서 로 교환하여 이모빌라이져와 스티어링락을 동시에 해 제한 후 엔진에 시동을 걸어준다. 이와 같이 스마트키 시 스템은 자동차가 스스로 주인을 인식하는 차세대 미래 형 자동차 키 시스템으로 운전자의 편의성뿐만 아니라 기계식 자동차 키 방식보다 도난 방지 기능이 강화된 시 스템이라고 할 수 있다. 스마트키 시스템의 차량 사용자 인증 과정은 125∼134KHz(LF, Low Frequency)와 315∼
447MHz(UHF, Ultra High Frequency)의 무선 주파수를 사 용하여 이루어진다. 차량 인증이 요청되면 차량 측에서 LF 데이터를 FOB 키로 송신하고, 이 데이터를 받은 FOB 키는 사용자 아이디를 확인하여 인증이 되면 UHF 데이 터를 차량으로 송신한다. 차량에서는 UHF 데이터를 수 신하여 사용자 아이디를 확인하고 인증절차를 마친다.
차량 사용자 인증이 완료되면 도어락과 스티어링락의 해제가 이루어진다[6].
2.4. 스마트키 시스템에서의 충돌 방지 알고리즘 스마트키 시스템에서의 충돌 방지 알고리즘은 텍사 스 인스트루먼트 사에서 제안한 것으로 하나의 스마트 키 시스템에 최대 4개의 FOB 키를 사용 할 수 있게 구성 되어 있고 시간분할 다중 접속방식을 사용하여 데이터 충돌을 방지하고 있다[7]. 그림 1은 FOB 키로 전송되는 LF 데이터의 패턴을 나타낸다.
그림 1. LF 데이터 통신 패턴 Fig. 1 LF data communication pattern Preamble은 잡음과 데이터를 구분하고 시간 동기를 맞추기 위한 예비 과정이며 Wake Pattern은 전력을 소비 하지 않는 슬립 모드에서 데이터를 수신할 수 있는 웨이 크업 상태로 FOB 키의 상태가 전환되기 위한 비트 패턴 이다. 이때 FOB 키는 수신 패턴이 미리 정의되어 있는 웨이크 패턴과 일치할 경우 동작 상태를 웨이크업 상태 로 전환한다. Data 는 각각의 차량마다 정해져있는 FOB 키 인식 정보이며 FOB 키의 메모리에 저장되어있는
FOB 키 인식 정보와 일치할 경우 UHF 무선 주파수로 FOB 키의 사용자 아이디 및 수행 명령 정보를 차량으로 전송한다. Request Response는 충돌방지를 위한 부분으 로 FOB 키에서 Request response에서의 응답 정보를 확 인하여 정해진 응답 순서에 따라 순차적으로 사용자 아 이디 정보를 차량으로 송신한다.
FOB 키는 LF 데이터 수신시 Request Response에 따라 순차적으로 UHF 데이터를 송신할 수 있도록 각각의 응 답 정보를 가지고 있다. 예를 들어 첫 번째 FOB 키인 경 우에는 Request Response에 한 개의 펄스가 존재하고, 네 번째 FOB 키인 경우에는 Request Response에 네 개의 펄 스가 존재한다. Wake Pattern과 Data 를 수신한 첫 번째 FOB 키는 첫 번째 Request Response를 확인 후 일치하는 경우 자신의 사용자 아이디가 포함된 UHF 데이터를 송 신하게 되며 차량에서는 UHF 데이터를 수신하면 두 번 째 LF 데이터 송신을 보류한다. 이후 차량에서는 UHF 데이터가 메모리에 저장되어있는 정보와 일치하는 경 우 더 이상의 LF 데이터를 송신하지 않으며, 그렇지 않 은 경우 두 번째 Request Response를 갖는 LF 데이터를 송신한다.
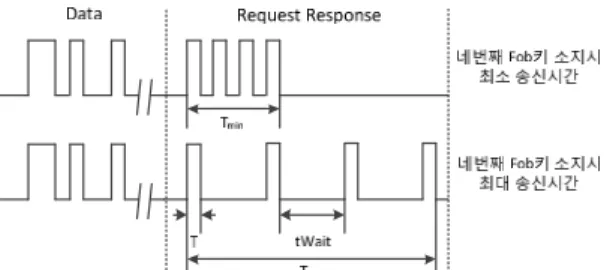
그림 2. 네 번째 FOB 키 소지 시 최소 및 최대 송신 시간 Fig. 2 Transmitting time of the Request Response of
the fourth FOB key
그림 2는 LF 데이터 통신 패턴의 일부분으로써 차량
에서 FOB 키로 전송하는 네 번째 FOB 키에 대한
Request Response의 최소 및 최대 송신 시간을 각각 나
타낸다. 이때 T는 최소 펄스폭으로써 LF 수신 칩 특성
으로 인해 100us의 시간을 유지해야 하고, tWait은 두
펄스 사이의 시간 간격으로써 최소 3ms의 시간을 유지
해야 한다. 또한 tWait의 시간은 모든 FOB 키가 동일한
무선 통신 범위 내에 존재하고 인식 정보가 일치하는
경우 UHF 무선 주파수로 FOB 키의 사용자 아이디 및 수행 명령 정보를 차량으로 전송하는 경우에 최대가 된 다. 즉, tWait의 최대 시간은 FOB키에서 차량으로 UHF 데이터를 전송하는 시간을 의미하고 총 48비트의 데이 터를 전송하는데 57.6ms의 시간이 소요된다. 따라서 FOB 키가 네 개인 경우 네 번째 FOB 키 소지시 Request Response 최소 시간 Tmin과 최대 시간 Tmax 는 다음과 같다.
min
× × (1)
max
× × (2)
결과적으로 FOB 키의 개수가 늘어나거나 UHF 데이 터의 양이 추가적으로 늘어나는 경우, 또는 데이터 전송 실패로 인해 재전송이 이루어지는 경우 사용자 인증에 소요되는 시간은 더욱 늘어나게 된다. 이와 같이 스마트 키 시스템에서 차량과 FOB 키 간의 응답 지연 시간이 증 가하게 되면 사용자 아이디 인증 시간과 사용자가 문을 여는 행위가 동시에 발생하게 되는 Jam 현상이 발생하 게 되어 차량 도어가 열리지 않는 문제로 인해 사용자는 불편함을 느끼게 된다.
Ⅲ. 향상된 충돌 방지 알고리즘 설계
본 장에서는 설계한 충돌 방지 알고리즘을 구현하기 위한 시스템을 설계한다. 충돌 방지 알고리즘은 차량 사 용자 인증 시 소요되는 지연 시간을 감소시키기 위해 스 마트키 시스템의 충돌방지 알고리즘에서 동적으로 사 용자 아이디 요청 순서를 최근 사용자 아이디로 변경하 는 알고리즘이다.
3.1. 전체 시스템 설계
본 논문에서는 스마트키 시스템의 전체 컨트롤을 위 한 컨트롤 유닛, LF 데이터를 송신하는 LF 송신모듈, LF 데이터를 수신하여 FOB 키 인식 정보와 일치하면 UHF 데이터를 송신하는 FOB 키, UHF 데이터를 수신하여 컨 트롤 유닛으로 사용자 아이디를 전송하는 RF 수신모듈 을 설계하였다.
이때 컨트롤 유닛은 차량 제어부인 BCM(Body Control Module), 시동을 위한 외부 입력 스위치 모듈, 스 티어링락의 제어를 위한 전자제어식 스티어링락 모듈 과 유선으로 연결되어 차량 제어 동작을 수행한다. 그림 3은 향상된 충돌 방지 알고리즘 설계를 위한 전체 시스 템 구성도를 나타낸다.
그림 3. 전체 시스템 구성도 Fig. 3 Block diagram of the system 3.2. 컨트롤 유닛
컨트롤 유닛의 구성은 크게 전원부, 릴레이부, 컨트롤 부로 설계한다. 차량에서는 대부분 DC 12V를 전원으로 사용하기 때문에 마이크로컨트롤러 및 주변회로에 맞 게 DC 5V로 변환 할 수 있는 전원부가 필요하다. 전원부 는 차량의 특성상 지터를 안정화 하는 기능도 포함하고 있다. 릴레이부는 차량에 사용되는 각종 엑추에이터와 같은 고전류 장치들을 제어하기 위한 스위치이다. 제어 부의 신호에 따라 릴레이부를 통해 도어를 열어주거나 닫아주는 등 차량을 제어할 수 있다. 마이크로컨트롤러 와 주변회로로 구성된 제어부는 UHF 데이터 입력, 스위 치 입력과 같은 입력부와 LF 데이터 출력, 릴레이 제어 출력과 같은 출력부로 구성된다.
컨트롤 유닛의 동작은 먼저 LF 데이터를 송신하기 위
해서 제어부에서 LF 모듈로 데이터 송신 명령을 보내준
다. LF 모듈에서는 제어부의 명령에 따라 내부 메모리에
저장된 데이터를 FOB 키로 송신한다. FOB 키에서는 LF
데이터 사용자 인증 후 UHF 데이터를 송신하고, 차량에
서는 UHF 수신 모듈을 통해 UHF 데이터를 수신하고 미
리 저장되어 있는 정보와 수신된 데이터가 일치하는 경 우 각각의 명령에 따라 해당 동작을 수행한다.
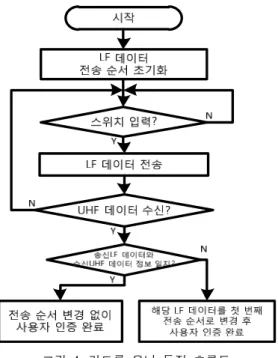
그림 4. 컨트롤 유닛 동작 흐름도 Fig 4. Flow chart for operation of control unit 그림 4는 컨트롤 유닛이 사용자를 인증하여 LF 데이 터의 전송 순서를 정하는 과정을 나타내는 흐름도이다.
먼저 LF 데이터의 전송 순서를 초기화 하고 외부 스위치 입력 신호가 인가되면 LF 송신 모듈로 초기화 된 LF 데 이터를 일정한 시간 간격 순서대로 전송한다. 이후 모든 LF 데이터를 전송한 후에도 UHF 데이터가 수신되지 않 는 경우 다시 스위치 입력을 위해 대기하고, UHF 데이터 가 수신되는 경우에는 메모리에 미리 저장되어 있는 데 이터와 비교한다. 이때 전송한 LF 데이터에 해당하는 UHF 데이터 맵핑 정보와 수신된 UHF 데이터 정보가 일 치하면 LF 데이터의 전송 순서의 변경 없이 사용자 인증 을 완료하고, 그렇지 않으면 수신된 UHF 데이터 맵핑 정 보에 해당하는 LF 데이터를 첫 번째 전송 순서로 변경 한 후 사용자 인증을 완료한다. 따라서 컨트롤 유닛은 사 용자 인증 절차가 완료 되기 전 LF 데이터 전송 순서가 가장 최근에 인증된 사용자 아이디로 변경되면 차후 인 증 시 우선적으로 해당 LF 데이터를 LF 송신 모듈로 전 송한다.
3.3. LF 송신 모듈
LF 송신 모듈은 LF 컨트롤부, 변조 발생부, 안테나부 로 구성한다. LF 컨트롤부는 컨트롤 유닛으로부터 수신 되는 제어 신호를 분석하고 LF 데이터를 변조 발생부로 전달한다. 안테나부는 변조된 전송 신호를 공중으로 방 사하여 LF 데이터를 FOB 키로 전송한다. LF 송신 모듈 의 전송 거리는 최대 1.5m 이다.
LF 데이터 포맷은 크게 웨이크업 패턴과 Request Response 데이터를 포함하는 데이터 패턴으로 구분한 다. 이때 Request Response 펄스의 폭은 최소 128us이고 전송 순서에 따라 정수배인 1배, 2배, 3배, 4배로 정한다.
본 논문에서 구성하는 시스템의 LF 수신 칩 특성 상 하 나의 데이터로 인식할 수 있는 125 Khz 주파수의 주기 는 16 Period 이다. 또한 125Khz의 1주기는 8us이므로 16 Period 에 해당하는 펄스폭은 128us가 된다. 따라서 Request Response 펄스폭은 최소 128us 로 구성하는 것 이다.
그림 5. LF 송신모듈 동작 흐름도 Fig. 5 Flow chart for operation of LF transmission
module
그림 5는 LF 송신모듈의 동작을 나타낸다. LF 송신
모듈은 컨트롤 유닛으로부터 LF 데이터 요청 신호가
수신되면 20ms의 대기시간을 검사하기 위한 타이머를
리셋하고 난 후 웨이크업 및 데이터 패턴을 발생시켜 FOB 키로 송신한다. 이후 요청된 전송 순서의 Request Response 신호를 전송하게 되며 20ms의 대기시간을 갖 게 된다.
대기 시간인 20ms 이내 LF 데이터 요청 신호가 수신 되는 경우에는 요청된 전송 순서에 해당하는 Request Response 데이터만을 전송하고, 그렇지 않으면 웨이크 업 및 데이터 패턴을 포함한 LF 데이터를 전송 한 후 전 송 순서에 해당하는 Request Response 데이터를 전송한 다. 20ms의 타이머를 검사하는 이유는 LF 데이터를 수 신하는 FOB 키의 LF 수신 칩 특성 상 20ms 동안 LF 데이 터의 수신이 없으면 슬립모드로 전환되어 더 이상의 데 이터 수신이 불가능하기 때문이다.
3.4. FOB 키
FOB 키는 LF 데이터 수신부, 데이터 처리부, UHF 데 이터 송신부로 구성한다. LF 데이터 수신부의 LF 안테 나는 X축, Y축, Z축 세 방향으로 들어오는 LF 신호를 수 신할 수 있도록 3개의 안테나를 하나로 통합하여 사용한 다. 또한 LF 수신 칩은 LF 안테나에서 수신된 신호 중 수 신강도가 강한 축의 신호를 받아들여 수신된 데이터를 분석한다. 이때 LF 수신 칩은 슬립 모드로 대기하고 있 다가 웨이크업 패턴과 일치하는 경우 LF 칩은 웨이크업 하고 이후에 수신되는 데이터를 데이터 처리부로 전달 한다.
데이터 처리부는 소비전력의 최소화를 위해 평상시 에는 항상 슬립모드 상태로 대기한다. 이후 입력되는 모 든 신호는 인터럽트로 처리되며 인터럽트가 발생하면 슬립모드에서 일반모드로 전환하고 수신되는 데이터를 처리한다. LF 데이터가 입력되면 미리 저장된 데이터와 비교하여 일치하는 경우 UHF 데이터를 UHF 데이터 송 신부로 전달한다. UHF 데이터 송신부는 발진단, 변조단, UHF 안테나 단으로 구성되어 있고 데이터 처리부에서 입력된 데이터를 발진단에서 안정된 발진을 위해 저주 파 크리스탈을 이용하여 발진한다. 이후 발진된 주파수 를 다단 체배를 이용하여 UHF 대역의 주파수를 발생시 킨다. 발생된 주파수는 데이터 처리부에서 입력된 데이 터와 함께 변조단을 통해 변조되고 이 신호는 UHF 안테 나를 통해 공중으로 방사된다.
그림 6. FOB 키 동작 흐름도 Fig. 6 Flow chart of FOB key
FOB 키의 동작은 그림 6과 같이 LF 안테나를 통해 수신된 LF 데이터가 LF 송신 모듈에서 송신한 웨이크 업 패턴과 일치하는 경우 LF 칩은 슬립모드에서 일반 모드로 전환하고 연속적으로 수신되는 LF 데이터를 복조하여 FOB 키의 메인 제어 칩으로 디지털 데이터 를 전송한다. 메인 제어 칩으로 수신된 디지털 신호는 메모리에 미리 저장되어 있는 데이터와 비교 분석하 고 일치하는 경우 UHF 데이터를 송신할 준비를 한다.
이후 들어오는 Request Response 신호를 분석하여 미
리 저장되어 있는 전송 순서와 일치하는 경우 UHF 데
이터 전송부로 전달한다. 웨이크업 및 데이터 패턴 확
인 후 Request Response 신호를 기다리는 시간은 LF 수
신 칩의 특성 상 20ms 이내 이다. 20ms를 초과하면 LF
수신 칩과 메인 제어 칩은 일반모드에서 슬립모드로
전환하며 더 이상의 Request Response 신호가 수신되
어도 응답하지 않는다.
Ⅳ. 구현 및 성능 평가
본 장에서는 컨트롤 유닛, LF 송신 모듈, FOB 키를 하 드웨어 보드로 설계하고 향상된 충돌방지 알고리즘을 적용하여 시스템을 구현한다. 또한 기존 스마트키 시스 템 인증 시 소요되는 시간과 제안한 알고리즘을 적용한 시스템 인증 시 소요되는 시간을 측정하여 비교 평가한 다. 본 시스템은 크게 사용자 인증 요청 시 인증 데이터 를 요구하는 동작과 수신된 데이터를 비교 분석하고 제 어하는 차량 측 하드웨어인 컨트롤 유닛 및 LF 송신 모 듈과 인증 데이터를 전송해주는 사용자측 하드웨어인 FOB 키로 구성한다.
4.1. 시스템 구현
컨트롤 유닛은 기본적으로 외부 스위치의 입력을 받 아 LF 송신 모듈로 LF 데이터 전송 요청 신호를 보낸다.
그 후 UHF 데이터가 수신되면 컨트롤러 내의 메모리에 미리 저장되어 있는 데이터와 비교하여 일치하는 경우 사용자 인증을 한다. 이와 같은 동작을 위해 컨트롤 유 닛은 동작 제어에 필요한 컨트롤러와 UHF 데이터 수신 을 위한 UHF 수신 칩, 공급되는 전원(+12V)의 안정화 를 위한 DC-DC 컨버터, 사용자 인증 후 차량을 제어하 는 릴레이로 구성되어 있다.
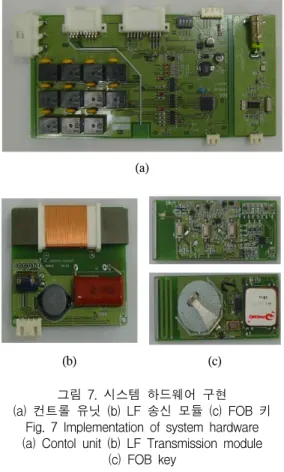
LF 송신 모듈은 컨트롤 유닛과 유선으로 연결되어 있고 컨트롤 유닛으로부터 수신된 LF 데이터 요청 신 호를 판단하는 컨트롤러와 키 번호별로 정해진 125Khz LF 데이터를 전송하는 LF 송신 칩과 코일 안테나로 구 성되어 있다. FOB 키는 LF 송신 모듈로부터 데이터를 수신하는 3축 안테나와 수신된 LF 데이터를 디지털 데 이터로 변환하여 컨트롤러로 전달하는 LF 수신 칩, 데 이터 분석 및 동작 제어를 위한 컨트롤러, 컨트롤 유닛 으로 사용자 인증에 필요한 데이터를 전송하는 UHF 송 신 칩으로 구성한다. 그림 7은 시스템 하드웨어 구성을 나타낸다.
(a)
(b) (c)
그림 7. 시스템 하드웨어 구현 (a) 컨트롤 유닛 (b) LF 송신 모듈 (c) FOB 키
Fig. 7 Implementation of system hardware (a) Contol unit (b) LF Transmission module
(c) FOB key 4.2. 신호 측정 및 성능 평가
본 논문에서는 향상된 충돌방지 알고리즘의 성능 평가를 위해 한 개의 컨트롤 유닛과 한 개의 LF 송신 모듈, 네 개의 FOB 키로 시스템을 구현한다. 사용자 인증 시 전송 순서에 따라 변화되는 컨트롤 유닛의 LF 데이터 요청 신호를 측정하며, LF 송신 모듈에서 송신 하는 LF 데이터의 변화를 측정한다. 또한 각각의 키 별로 인증을 반복하여 기존 스마트키 시스템과 향상 된 충돌방지 알고리즘이 적용된 시스템과의 성능을 비교한다.
4.2.1. LF 데이터 신호 측정
그림 8은 LF 송신 모듈에서 전송한 LF 데이터를 FOB
키의 LF 수신 칩을 통해 디지털 데이터로 변환된 신호를
측정한 것이다.
(a) (b)
(c) (d)
그림 8. LF 데이터 측정 신호
(a) 첫 번째 FOB 키 최초 인증 (b) 첫 번째 FOB 키 차후 인증 (c) 네 번째 FOB 키 최초 인증
(d) 네 번째 FOB 키 차후 인증 Fig. 8 Capture signal of LF data (a) The initial authentication of the first FOB key
(b) The later authentication of the first FOB key (c) The initial authentication of the fourth FOB key (d) The later authentication of the fourth FOB key (a)는 전송 순서가 첫 번째인 FOB 키를 소지하였을 때 의 최초 인증 과정 중 전달되는 데이터 신호이다. 이때 첫 번째 FOB 키에 해당하는 Request Response의 펄스폭 은 128us이다. LF 송신 모듈에서 전송 순서가 첫 번째인 FOB 키가 응답할 수 있는 데이터를 보내고 컨트롤 유닛 에서 첫 번째 FOB 키의 UHF 데이터 신호가 수신되면 더 이상의 Request Response 신호를 전송하지 않는다. (b)는 차후 인증 과정 중 전달되는 데이터이며 전송 순서는 변 하지 않아 기존과 동일한 Request Response 신호를 전송 한다. (c)는 전송 순서가 네 번째인 FOB 키를 소지하였을 경우의 인증 과정이며 전송 순서가 첫 번째인 FOB 키부 터 세 번째 FOB 키까지 응답이 없어 두 번째, 세 번째, 네 번째 전송 순서의 Request Response 신호를 모두 전송하 는 것을 나타낸다. 이때 LF 수신 칩 특성 상 Request Response 간의 간격은 최대 20ms 이내로 전송할 때 추가 적인 웨이크업 패턴 과정을 생략할 수 있다. 또한 네 번 째 FOB 키에 해당하는 Request Response의 펄스폭은 최 소 펄스폭의 네 배인 512us이다. (d)는 차후 인증 과정 중
전달되는 데이터이며 전송 순서가 변경됨에 따라 네 번 째 FOB 키의 Request Response 신호를 가장 먼저 전송함 을 나타낸다.
4.2.2. 성능 평가
사용자 인증 시 소요되는 시간의 성능을 평가하기 위 해 FOB 키의 인증 횟수를 증가시키면서 기존 스마트키 시스템 인증 시 소요되는 시간과 제안한 알고리즘을 적 용한 시스템 인증 시 소요되는 시간을 측정하여 비교 평 가한다.
LF 데이터에서 웨이크업 및 데이터 패턴은 고정되 어 있고 Request Response 패턴은 전송 순서에 따라 가 변적으로 변하기 때문에 Request Response 인증 소요시 간을 측정하는 것이 성능 평가의 지표가 된다. 또한 초 기 Request Response 패턴 전송 순서는 첫 번째 FOB 키 에서 네 번째 FOB 키의 순으로 하고 데이터 전송 실패 로 인해 재전송이 이루어지는 경우를 가정하여 Request Reponse 인증 소요 시간 측정 횟수를 증가시키면서 비 교한다.
표 1. 기존 알고리즘의 Request Response 소요시간 Table. 1 Request response time required of existing
algorithm
(단위: ms)
최초인증 3회 7회 10회
첫 번째
FOB 키 0.1 0.3 0.7 1.0
두 번째FOB 키 57.8 173.4 404.6 578.0 세 번째FOB 키 115.5 346.5 808.5 1155.0 네 번째
FOB 키 173.2 519.2 1212.4 1732.0
표 1은 기존 알고리즘이 적용된 시스템에서 각 FOB
키별 인증 횟수를 증가시킴에 따라 발생하는 Request
Response 인증 소요시간을 측정한 것이다. 첫 번째 FOB
키를 사용한 경우 Request Response 인증 소요 시간은 펄
스폭이 짧고, 가장 처음으로 인증되기 때문에 인증 소요
시간이 다른 전송 순서의 FOB 키에 비해 짧다. 반면에
네 번째 FOB 키를 사용한 경우 가장 긴 펄스폭과 마지막
전송 순서로 인해 최초 인증으로부터 횟수에 비례하여
인증 소요 시간이 증가됨을 알 수 있다.
표 2. 제안된 알고리즘의 Request Response 소요시간 Table. 2 Request response time required of proposed
algorithm
(단위: ms)
최초인증 3회 7회 10회
첫 번째
FOB 키 0.128 0.384 0.896 1.280
두 번째
FOB 키 57.984 58.496 59.520 60.288 세 번째FOB 키 115.968 116.736 118.272 119.424 네 번째FOB 키 174.080 175.104 177.152 178.688
표 2는 제안된 알고리즘이 적용된 시스템에서 각 FOB 키별 인증 횟수를 증가시킴에 따라 발생하는 Request Response 인증 소요시간을 측정한 것이다. 첫 번째 FOB 키를 사용한 경우 Request Response 인증 소 요 시간은 펄스폭이 짧고, 우선적으로 인증되기 때문 에 인증 소요 시간이 다른 전송 순서의 FOB 키에 비해 짧다. 이때 각 전송 순서별 Request Response 펄스폭은 LF 수신 칩 특성상 128us의 배수로 하고, UHF 데이터를 수신하는 경우를 가정하여 식 (2)의 Tmax를 적용한 인 증 소요 시간을 측정한다. 네 번째 FOB 키를 사용한 경 우 최초 인증 이후에 전송 순서가 변경되기 때문에 인 증 횟수가 증가하더라도 최초 인증 소요 시간에서 크게 벗어나지 않고 인증 소요 시간이 다소 증가됨을 알 수 있다.
따라서 제안한 알고리즘은 Request Response 인증 소 요 시간을 3회 연속으로 측정한 경우 기존 알고리즘에 비해 약 33% 정도 빠른 인증 소요 시간을 보인다. 이는 LF 데이터에서 데이터 패턴에 포함된 Request Response 인증 소요 시간만을 측정한 결과이다. 결국 LF 데이터 의 웨이크업 패턴까지 모두 고려하더라도 전체 인증 프 로세스의 소요 시간이 감소하기 때문에 기존 알고리즘 과는 달리 Jam 현상으로 인한 문제를 충분히 해결 할 수 있다.
Ⅴ. 결론 및 향후 연구과제
본 논문에서는 차량인증 시스템의 인증 과정 중 발생 하는 다중접속의 문제점을 효율적으로 해결하고 차량 사용자 인증 시 소요되는 지연 시간을 감소시키기 위해 스마트키 시스템의 충돌방지 알고리즘에서 동적으로 사용자 아이디 요청 순서를 최근 사용자 아이디로 변경 할 수 있도록 차량 사용자 인증 시스템을 위한 향상된 충 돌 방지 알고리즘을 설계하였다. 즉 최근 사용자 인증된 FOB 키를 첫 번째 전송 순서로 전환하고 차후 인증 시 우 선적으로 전송할 수 있도록 LF 데이터 패턴의 Request Response 부분을 변경하였다. 설계된 충돌방지 알고리 즘은 Request Response 인증 소요 시간을 3회 연속으로 측정한 경우 기존 알고리즘에 비해 약 33% 정도의 성능 향상을 보였다.
향후 연구과제로는 사용되는 FOB 키의 개수가 증가 하더라도 빠른 인증 소요 시간을 보장 할 수 있는 효율적 인 Request Response 설계 방안 및 스마트키를 많이 사용 하는 일반 출입통제 시스템과 같은 다중 접속 환경에서 의 사용자 인증 시스템에 대한 연구가 함께 이루어져야 할 것이다.
참고문헌
[1] 이태현, “자동차 도난방지 기술 분야에 관한 특허 출 원 동향,” 특허정보보고서, 2001.
[2] K. Finkenzeller, RFID Handbook, 3rd Edition. John Wiley & Sons, 2010.
[3] Z. Tang and Y. He, “Reserach of multi-access and anti-collision protocols in RFID systems,” in IEEE International Workshop on Anti counterfeiting, Security, Identification, (Xiamen, China), pp. 377-380, 2007.
[4] Dheeraj K. Klair, Kwan-Wu Chin, and Raad Raad, “A survey jand tutorial of RFID anti-collision protocols,”
IEEE Communications Surveys & Tutorials, VOL. 12, No. 3, pp. 400-421, Third Quarter 2010.
[5] 이윤섭 외 3명, “교통카드와 같은 범용 RFID를 활용
한 자동차용 스마트키 시스템 설계 및 구현,” 대한전
자공학회논문지 제 46권 CI편 제 4호, pp. 447-448, 2009.
[6] 콘티넨탈 오토모티브 시스템 주식회사, “스마트키 시스템 및 스마트키 시스템의 동작방법,” 대한민국 특허청 공개특허 10-2010-0049885, 2010.
[7] Texas Instruments Incorporated, “TRIS Automotive Devices Analog Front End IC TMS37112,” Reference Guide 11-09-21-046, 2001.
저자소개