Copyright
Ⓒ2013 KSAE / 124-05 pISSN 1225-6382 / eISSN 2234-0149 DOI http://dx.doi.org/10.7467/KSAE.2013.21.4.033 Transactions of KSAE, Vol. 21, No. 4, pp.33-42 (2013)
단일 레이저 스캐너와
Integrated Probabilistic Data Association Filter를 이용한 도심환경에서의 다중 차량추적
김 동 철1)․한 재 현2)․선 우 명 호*3)
한양대학교 자동차공학과1)․만도 전자개발 2팀2)․한양대학교 미래자동차공학과3)
Multiple Vehicle Tracking in Urban Environment using Integrated Probabilistic Data Association Filter
with Single Laser Scanner
Dongchul Kim
1)
․Jaehyun Han2)
․Myoungho Sunwoo*3)
1)
Department of Automotive Engineering, Graduate School, Hanyang University, Seoul 133-791, Korea
2)
Advanced Electronics, Electronics R&D Center, Mando Global R&D Division, 21 Pangyo-ro, 225-gil, Bundang-gu, Seongnam-si, Gyeonggi, Korea
3)
Department of Automotive Engineering, Hanyang University, Seoul 133-791, Korea (Received 2 February 2012 / Revised 11 December 2012 / Accepted 18 December 2012)
Abstract : This paper describes a multiple vehicle tracking algorithm using an integrated probabilistic data association filter (IPDAF) in urban environments. The algorithm consists of two parts; a pre-processing stage and an IPDA tracker.
In the pre-processing stage, measurements are generated by a feature extraction method that manipulates raw data into predefined geometric features of vehicles as lines and boxes. After that, the measurements are divided into two different objects, dynamic and static objects, by using information of ego-vehicle motion. The IPDA tracker estimates not only states of tracks but also existence probability recursively. The existence probability greatly assists reliable initiation and termination of track in cluttered environment. The algorithm was validated by using experimental data which is collected in urban environment by using single laser scanner.
Key words : Vehicle tracking(차량추적), Integrated Probabilistic Data Association Filter(IPDAF, 통합 확률기반 자 료결합 필터), Feature extraction(특징 추출), Laser scanner(레이저 스캐너)
1. 서 론
1)
최근 급속히 늘어나고 있는 자동차 전자제어 시 스템은 운전자에게 편의를 제공하고 차량의 안전성 을 향상시키는 것을 가능하게 하였다. 이에 따라 ACC(Adaptive Cruise Control), FCW(Forward Colli- sion Warning) 등의 시스템이 적용된 자동차가 이미 상용화되었고, 지능형 자동차의 궁극적인 형태로서
*
Corresponding author, E-mail: [email protected]
자율주행자동차에 대한 연구가 활발히 이루어지고 있다.
자율주행시스템은 크게 주변 환경을 인식하는 인 식시스템과 인식된 환경정보를 이용하여 안전한 경 로를 생성하고 이를 추종하는 자율주행시스템으로 나뉠 수 있다. 인식시스템은 자율주행자동차의 현 재 위치, 차선, 차량주변의 정적인 물체와 동적인 물 체 등에 대한 정보를 다양한 센서로부터 추출하고 종합하여 안전한 경로를 선택하거나 위험을 능동적
김동철․한재현․선우명호
으로 회피하는 것을 가능하게 한다. 특히 도심주행 환경에서 자율주행자동차가 안전하게 운행하기 위 해서는 도로상의 움직이는 차량을 인식하는 것이 필수적이다.
1)
움직이는 차량을 추적하기 위해서는 움직이는 물 체와 움직이지 않는 물체를 구분하는 것이 중요하 다. 움직이는 물체를 구분하는 방법에는 크게 occu- pancy grid map을 이용하는 방법
2)
과 특징(feature)을 추출하고 이를 이용하여 판단하는 방법으로 나뉜 다. occupancy grid map을 이용하는 방법은 움직이지 않는 물체를 효과적으로 표현할 수 있지만 많은 계 산량과 메모리가 필요하고, 저속으로 움직이는 물 체를 효과적으로 구분하지 못하는 단점이 있다.2007년 DARPA(Defense Advanced Research Pro- jects Agency) 주최로 열린 urban challenge 대회에서 1위를 차지한 Boss는 특징을 기반으로 움직이는 물 체를 검출하는 방법을 사용하였다.
3)
Boss는 고정밀 도의 GPS를 이용하여 정확한 차량의 위치를 추정하 고 지리정보를 바탕으로 도로 밖에서 검출된 특징 을 움직이는 물체에서 제외하였다. 그러나 이 방법 은 고가의 GPS를 필요로 하며 지리정보가 없을 경 우 성능이 저하되는 단점을 가지고 있다. 따라서 저 가의 센서를 이용한 차량모델 기반의 위치추적 알 고리즘 또한 활발히 연구되고 있다.4,5)
움직이는 물체의 상태를 추정하기 위해서는 주로 확률기반의 동적 필터가 사용되며 그 예로 EKF (Extended Kalman Filter),
6)
UKF (Unscented Kalman Filter),7)
IMMPDAF (Interactive Multiple Model Pro- babilistic Data Association Filter)8)
등이 사용된다. 동 적 필터를 사용하여 움직이는 물체의 상태를 추정 하였다면 추정된 움직이는 물체가 오검출 되었는지 판단해야 한다. 이를 판단하기 위해서 주로 추적 물 체의 lifetime, non-innovation time 등이 사용되며 판 단기준은 휴리스틱하게 결정된다.9)
PF (Particle Filter)
10)
는 칼만필터 기반의 추적알고 리즘에 비해 월등히 높은 성능을 보이며, 비선형 운 동 모델 및 임의의 확률분포를 가지는 환경에 제약 없이 적용할 수 있는 장점이 있다. 하지만 좋은 성능 을 이끌어내기 위해서는 충분한 숫자의 particle이 필요하며 이는 곧 계산량의 증가를 의미한다.이 논문에서는 occupancy grid map에 비해 계산량 과 메모리 사용량이 적은 특징기반의 추적알고리즘 을 사용하며 차량(ego-vehicle)의 주행정보를 바탕 으로 정지된 물체를 제외하였다. 또한 움직이는 물 체의 상태추정과 함께 존재확률 또한 추정 가능한 IPDAF(Integrated Probabilistic Data Association Filter)
11)
를 적용하여 추적 물체의 오검출 판단을 확률기반 으로 수행하고 추적 성능을 향상시켰다. 제안된 추 적 알고리즘은 실 도로상황에서 실험한 데이터를 바탕으로 검증되었다.2. 추적알고리즘 구조
이 논문에서 제시된 추적 알고리즘은 Fig. 1과 같 이 레이저스캐너로부터 받은 정보를 IPDA tracker에 서 사용될 측정값(measurement)으로 변환하는 전처 리(pre-processing) 과정과 이를 이용하여 매 시간단 계(time step, k) 마다 물체의 상태(state,
x
)를 추정하 고 물체의 존재 확률(existence probability,
)에 따라 트랙(track)을 관리하는 IPDA tracker로 나뉠 수 있다.
전처리 단계에서는 우선 레이저스캐너로부터 받 은 각 방위(
)의 거리정보(
)를 가진 원시정보(raw data,
)를 바탕으로 세그먼트(segment,
)로 분할 한다. 각 세그먼트들은 바운딩 박스(bounding box) 를 생성하고 이를 바탕으로 차량 크기의 가설 (hypothesis,
)이 생성된다. 이 때 생성되는 가설은Fig. 1 Tracking algorithm structure
단일 레이저 스캐너와 Integrated Probabilistic Data Association Filter를 이용한 도심환경에서의 다중 차량추적
미리 정의된 차량의 크기를 가진 직사각형이며, 각 바운딩 박스가 나타낼 수 있는 가능한 모든 경우에 대하여 가설을 생성한다. 생성된 가설들은 차량의 주행정보를 이용하여 움직이는 물체와 움직이지 않 는 물체로 분류되며 움직이는 가설들에 한해 가설 의 중심 위치와 방위각 정보를 포함하는 측정값(
) 을 생성한다.IPDA tracker는 움직이는 물체의 상태(
x
)와 불 확실성(
), 물체의 존재확률을 IPDAF를 통해 재 귀적으로 추정하며 물체의 존재확률을 바탕으로 추 적물체가 실제차량 또는 클러터(clutter)인지 구분한 다. IPDA tracker는 재귀적으로 동작하기 때문에 추 정 결과는 측정값 히스토리(measurement history,
)에 k번째 시간단계 이전의 측정값이 모두 포함 ( ⋯
)되어 반영된다. 또한 IPDAF에 의 해 결합(association)되지 않은 측정값( ∼
)은 이전 시간단계에서 사용되지 않은 측정값(
)과 함께 새로운 트랙을 생성하는 데 사용되었다.3. Pre-processing
전처리 단계에서는 상태 추정단계에서 사용될 측 정값이 생성되었다. 측정값은 위치(
)와 방위각 (heading angle,
) 정보를 가지며 분할과 측정값 생 성(measurement generation)과정을 통해 생성되도록 하였다.3.1 Segmentation & Hypothesis Generation
레이저스캐너에서 제공된 원시정보는 극좌표 형 식으로 각 측정각도(angle step)마다 측정된 거리를 제공하며 이는 움직이는 물체를 나타내기에 부적합 하다. 원시정보를 물체단위로 나타내기 위해서는 가까운 거리의 원시정보들을 묶어서 여러 개의 세 그먼트로 분할할 필요가 있다. 세그먼트는 극좌표 상에서 ABD (Adaptive Breakpoint Detector)12)
를 이 용하여 분할되었다. 분할된 세그먼트들은 각각 하 나의 물체를 나타내는 것으로 가정되었고 이 중 차 량을 나타낼 수 있는 세그먼트를 대상으로 가설을 생성하였다. 이를 위해 각 세그먼트의 원시정보들 을 바탕으로 IEPF (Iterative End Point Fit)방법10)
을이용하여 직선을 추출하였고 이 중 가장 긴 직선을 방위각으로 가지는 바운딩 박스가 생성되었다. 이 후 생성된 바운딩 박스 중 차량의 크기보다 작은 바 운딩 박스에 한해 가능한 모든 차량에 대한 가설을 생성하였다.
13)
3.2 Measurement Generation
측정값 생성 단계에서는 생성된 가설에서 미리 정의된 차량의 크기를 이용하여 위치와 방위각 정 보를 가지는 측정값을 추출해 내었다. 추출된 측정 값은 차량의 휠 속도(wheel speed,
), 조향각 (steering angle,
) 및 선회속도(yaw rate,
)를 바탕 으로 보상된 이전 위치의 측정값과 비교되며 일정 속도(
)이하의 측정값은 IPDA tracker에서 사용되 지 않았다.4. IPDA Tracker
IPDA tracker는 추적대상 모델을 이용하여 트랙 의 상태를 예측하고 측정값을 확률적으로 조합함으 로써 정밀한 추정을 수행한다. 동시에 추적 대상의 존재확률을 계산하며 계산된 존재확률에 따라 트랙 을 관리한다.
4.1 추적대상 모델
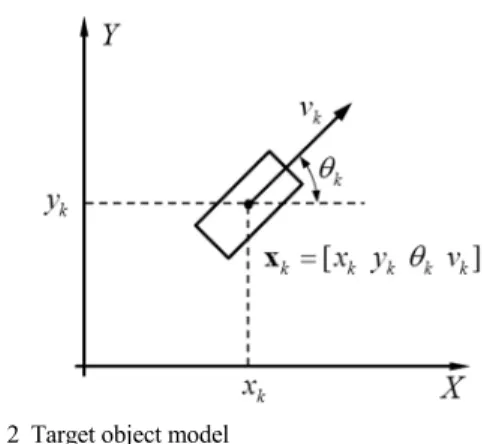
Fig. 2는 추적대상 모델의 상태벡터(state vector) 를 나타내며 이는 현재 시간단계 k에서 추적대상 위 치(
,
), 방위각(
), 방위각 방향으로의 속도(
) 로 이루어진다. 추적대상은 등속 직선운동에 따른 다는 가정을 바탕으로 추적대상 모델 및 측정모델 은 식 (1), (2)와 같이 각각 표현된다.x x
sin cos
(1)
x
(2)
는 샘플링 시간(sampling time)이며 차량의 추 적에 사용되는 모델이 비선형이기 때문에 IPDAF는 EKF 기반으로 설계되었다.Dongchul Kim․Jaehyun Han․Myoungho Sunwoo
Fig. 2 Target object model
4.2 Integrated Probabilistic Data Association Filter
IPDAF11)
는 기본적으로 PDA (Probabilistic Data Association) 방법14)
을 이용하여 상태를 추정함과 동 시에 물체의 존재확률을 계산한다. 물체의 존재확 률 계산 또한 상태 추정과 같이 예측(prediction)과 업데이트(update)의 두 단계로 이루어진다.4.2.1 Prediction
예측 단계에서는 추적대상 모델을 이용하여 사전 (priori) 상태(
x
) 및 공분산(covariance,
)을 각각 식 (3), (4)와 같이 계산하고 Markov chain을 이 용하여 존재확률을 예측한다. 추적대상 모델이 비 선형이므로 공분산의 예측에는 자코비안 행렬 (jacobian matrix, )이 사용되며 는 모델 불확실 성에 대한 공분산이다. x x
(3)
(4)물체의 존재확률은 측정값 히스토리(measure- ment hystory,
)에 대한 조건부 확률로써 계산되 며, Markov chain 1을 따른다고 가정했을 때 다음과 같이 사전 확률을 계산할 수 있다.Table 1 Markov transition matrix Exist at k
(
)Not exist at k (
) Exist at k-1(
)
Not exist at k-1
(
)
(5)
은 이전 시간단계와 현재 시간단계에서 계속 물체가 존재할 확률,
은 이전 시간단계에서 존재 하지 않았지만 현재 시간단계에서 존재할 확률이 다. Markov transition matrix는 Table 1에 표현되었다.4.2.2 Association
계산된 예측 결과를 바탕으로 선택 게이트(selec- tion gate,
)를 설정하고 게이트 안에 존재하는 측정 값을 확률 기반으로 조합하여 물체의 상태를 추정 한다. 선택 게이트의 크기는 잔차공분산(residual covariance,
)을 분산으로 가지는 가우시안 분포에 서 특정 확률값 이하를 나타내는 영역으로 결정되 며 이를 게이트확률(
)이라고 한다. 측정값이 게 이트 내부에 포함되었는지 여부는 잔차공분산과 잔 차(residual,
)를 이용한 마할라노비스 거리(Ma- halanobis distance)에 의해 식 (6)을 만족하는가에 따 라 결정된다. 잔차와 잔차공분산은 측정행렬(measure- ment matrix, )과 측정잡음(measurement noise) 공 분산()에 의해 식 (7), (8)과 같이 계산된다.
(6)
x
(7)
(8)게이트 안에서 선택된 측정값의 확률적 조합은 각 측정값의 우도(likelihood,
)를 이용하여 이루 어지며 이는 존재확률의 업데이트에도 반영된다.우도는
를 공분산으로 가지는 M차원의 가우시안 분포에 의해 결정되며 게이트확률에 의해 정규화 되어 식 (9)와 같이 나타난다. 이 때 M차원은 측정모 델의 차원을 말한다.
(9)
는 선택 게이트의 부피로 식 (10)과 같이 계산 될 수 있으며,
은 M차원 타원체의 부피를 계산하 기위한 계수이다.
는 게이트 내부의 클러터 개수 에 대한 기댓값으로 푸아송 분포(Poisson distribu-Multiple Vehicle Tracking in Urban Environment using Integrated Probabilistic Data Association Filter with Single Laser Scanner
tion)에 따르며 게이트 내부에 존재하는 측정값의 개수, 검출 확률(detection probability,
), 게이트 확 률, 사전 존재확률을 이용하여 식 (11)과 같이 근사 화 할 수 있다. 계산에 사용되는 인자 중 검출 확률 은 센서가 대상 물체를 검출할 수 있는 확률을 의미 한다.
는 게이트의 클러터 밀도로 식 (12)와 같이 표현할 수 있다.
(10)
(11)
(12)
는 우도비(likelihood ratio)로서 식 (13)과 같이 계산되며 이 값이 1보다 클 경우 존재 확률이 증가 한다.
는 가중치로 식 (14)와 같이 우도비에 의해 정규화된 형태로 계산된다. 가중치는 각 측정값에 의한 상태 업데이트의 확률적 조합에 사용된다.
(13)
(14)4.2.3 Update
업데이트 단계에서는 식 (15)를 통해 얻어진 칼만 이득(Kalman gain,
)에 의해 식 (16)과 같이 게이 트 안에서 선택된 각 측정값을 이용하여 예측된 결 과를 업데이트 하고 이를 가중치에 따라 식 (17)과 같이 조합한다.
(15) x x x
(16) x
x
(17)각 물체의 공분산 업데이트 또한 가중치에 따라
다음과 같이 계산된다.
(18)
x x x x
(19)
물체의 존재확률은 우도비와 Markov chain에 의 해 예측된 사전 확률을 이용하여 식 (20)과 같이 업 데이트된다.
(20)
4.3 New Track Generation
새로운 트랙은 two-point differencing 방법
15)
을 바 탕으로 이전 시간단계에서 사용되지 않은 측정값(
)과 현재 시간단계에서 결합되지 않은 측정값(
∼
)을 이용하여 생성되었다. 트랙의 생성 과정에 서 속도 및 선회속도가 차량이 움직일 수 있는 한계 를 초과하면 트랙을 생성하지 않았다. 생성된 트랙 은 모두 일정한 값의 초기 존재확률(
)을 가지고 다음 시간단계부터 추적되었다.4.4 Track Management
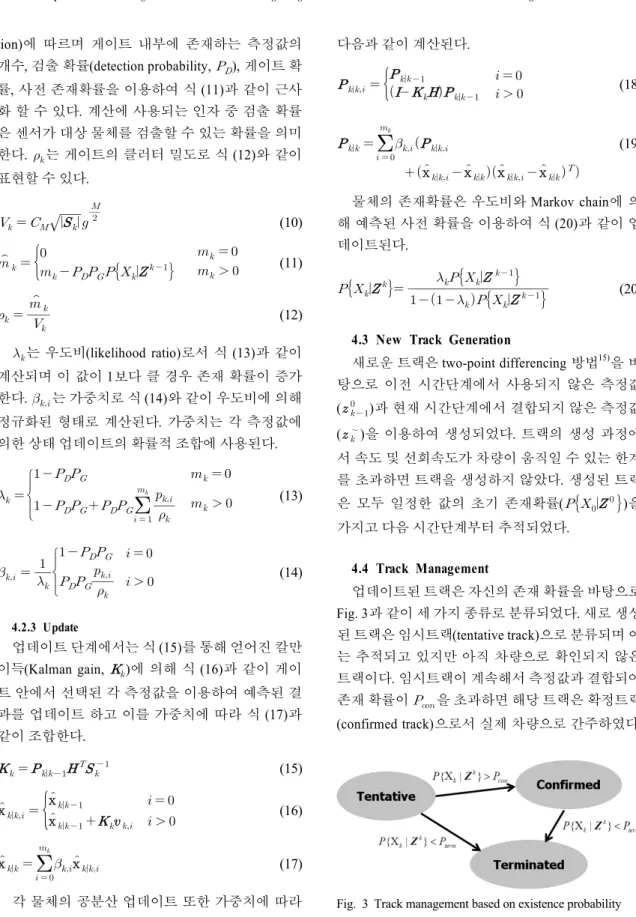
업데이트된 트랙은 자신의 존재 확률을 바탕으로 Fig. 3과 같이 세 가지 종류로 분류되었다. 새로 생성 된 트랙은 임시트랙(tentative track)으로 분류되며 이 는 추적되고 있지만 아직 차량으로 확인되지 않은 트랙이다. 임시트랙이 계속해서 측정값과 결합되어 존재 확률이
을 초과하면 해당 트랙은 확정트랙 (confirmed track)으로서 실제 차량으로 간주하였다.Fig. 3 Track management based on existence probability
김동철․한재현․선우명호
Fig. 4 Test vehicle
임시트랙 및 확정트랙이 측정값과 결합되지 못하고 존재확률이 감소하여
보다 작아지면 종료된 트랙(terminated track)이 되어 더 이상 추적되지 않 았다.5. 실 험
5.1 실험환경 구성
실험 데이터는 Fig. 4의 현대 투싼 IX차량의 정면 에 Fig. 5와 같이 수평으로 설치된 SICK사의 LMS291 레이저스캐너를 통해 수집되었다. LMS291 레이저 스캐너는 0.5°간격으로 180°영역을 80m까지 측정 할 수 있다. 데이터 수집 장소는 한양대학교 주변의 도로이며 Fig. 6에서와 같이 3개의 각기 다른 도로상 황을 바탕으로 수집되었다. Table 2는 알고리즘에 사용된 파라미터 값들을 나타내고 있다.
Fig. 5 Sensor configuration
Fig. 6 Test site
Table 2 Parameter configuration
파라미터 정의 값
샘플링 시간 100ms
이동물체 문턱속도 10km/h
선택 게이트 4 탐지(Detection) 확률 90%
초기 존재확률 20% 트랙 확정 문턱 확률 90%
트랙 종료 문턱 확률 5%
5.2 실험결과
Fig. 7(a)에는 카메라로 촬영된 이미지에 추적 결 과를 사각형으로 표시하였고 Fig. 7(b)에는 레이저 스캐너의 원시정보를 점으로 나타낸 후 사각형으로 차량의 위치들을 표현하고 직선으로 추정된 속도를 나타내었다. 원점에 위치한 사각형은 실험차량의 위치를 나타내고 있다. Fig. 7(a)와 (b)에서 오른쪽 길 가의 차량들은 모두 주차되어 있어 움직이지 않기 때문에 측정값이 생성되지 않는다. 따라서 주차된 차량은 추적되지 않고 오직 전방의 움직이고 있는 차량 한 대만 추적되었다. 추적된 차량의 존재 확률 과 속도는 Fig. 7(c)와 (d)에 도시되어 있다. 존재 확
단일 레이저 스캐너와 Integrated Probabilistic Data Association Filter를 이용한 도심환경에서의 다중 차량추적
(a) Camera image
(b) Bird-eye view
(c) Existence probability
(d) Estimated velocity
Fig. 7 Tracking result in scenario 1률은 추적되는 대부분의 시간동안 100%에 가깝게 유지 되었다. 추적된 차량은 감속하여 정차하였기 때문에 추적이 종료되었으며 Fig. 7(d)에서도 추적 종료 시점에서의 감속을 확인할 수 있다.
실험장소 2에서는 트랙의 존재 확률이 다른 경향 을 보이는 것을 알 수 있다. Fig. 8(a)와 (b)에 나타난 차량은 차도의 중앙을 분리하는 작은 장애물에 근 접하여 주행하였다. 이 경우 레이저 스캐너에 의해 측정된 차량의 원시정보와 장애물의 원시정보가 가 까워 제대로 분할되지 않고 하나의 세그먼트로 인 식되는 현상이 발생하였다. 따라서 측정값이 제대 로 생성되지 않아 트랙의 존재확률이 작아지게 된 다. 하지만 지속적으로 이러한 현상이 발생하는 것 이 아니기 때문에 존재 확률이 일시적으로 작아졌 다 다시 커지는 것을 Fig. 8(c)를 통해 확인할 수 있 다. 또한 측정값이 잘못 생성되어 트랙과 결합이 이 루어지지 않았을 때 알고리즘은 추적대상 모델만을 가지고 트랙의 상태를 추정하게 된다. 추적대상 모 델은 등속 모델을 사용하였으므로 존재 확률이 감 소하는 시점에서 트랙의 속도가 일정함을 Fig. 8(d) 에서 확인 할 수 있다.
Fig. 9(a)와 (b)는 전방 네 대의 차량이 추적됨을 보이고 있다. 가장 오른쪽 차량은 정지해 있는 차량 이기 때문에 추적되지 않았다. Fig. 9(c)는 추적 차량 들의 존재확률 변화를 시간에 따라 나타내고 있다.
실험장소 3은 차량이 많은 도로이기 때문에 트랙이 가려지는 상황이 많이 발생하였으며 Fig. 9(c)의 192 초, 193초에 존재확률이 감소하는 시점이 이를 나타 내고 있다. 전방의 신호등에 적색등이 켜져 있기 때 문에 Fig. 9(d)에 차량들이 전체적으로 감속하는 것 이 표시되었다.
Table 2는 각 실험 장소에서 레이저 스캐너에 의 해 검출된 차량과 추적된 차량의 대수를 보이고 있 다. 실험장소 2에서는 74.3%의 낮은 적중률을 보이 고 있는데 이 환경에서는 특히 반대방향으로 진행 하는 차량이 많았다. 이 차량들은 상대속도가 크기 때문에 레이저 스캐너에 의해 검출되는 시간이 짧 아 추적을 시작하기 전에 검출영역을 벗어난다. 따 라서 반대방향으로 진행하는 차량은 레이저 스캐너 에 검출되었지만 추적되지 못하여 낮은 적중률의
Dongchul Kim․Jaehyun Han․Myoungho Sunwoo
(a) Camera image
(b) Bird-eye view
(c) Existence probability
(d) Estimated velocity
Fig. 8 Tracking result in scenario 2(a) Camera image
(b) Bird-eye view
(c) Existence probability
(d) Estimated velocity
Fig. 9 Tracking result in scenario 3Multiple Vehicle Tracking in Urban Environment using Integrated Probabilistic Data Association Filter with Single Laser Scanner
Table 3 Performance of the algorithm
번호 실험 장소 실제 차량
(Target, 대)
추적된 차량 (True positive, 대)
오검출 차량 (False positive, 대)
적중률 (True positive rate, %)
1 살곶이길(1) 59 51 6 86.4
2 살곶이길(2) 35 26 5 74.3
3 왕십리로 37 34 8 91.9
- 합 계 131 111 19 84.7
원인이 된다. 반면, 실험장소 3에서는 반대방향으로 진행하는 차량이 많이 검출되지 않았기 때문에 91.9%의 높은 적중률을 보이고 있다.
6. 결 론
이 논문에서는 특징기반의 알고리즘을 적용하여 움직이는 물체와 정지된 물체를 지리정보에 의존하 지 않고 차량의 속도, 조향각 및 선회속도를 바탕으 로 구분하였다. 또한 IPDAF를 적용하여 트랙을 확 률기반으로 관리하며 존재 확률의 계산을 움직이는 물체의 상태를 추정함과 동시에 수행하였다. 제안 된 알고리즘은 실도로 환경에서 수집한 데이터를 바탕으로 검증되었다. 알고리즘의 성능은 평균적으 로 84.7%의 적중률을 보였으며 반대방향으로 진행 하는 차량이 적은 환경에서는 최대 91.9%의 적중률 을 보였다. 따라서 이 논문에서 제안된 다중차량 추 적 알고리즘은 자율주행 차량의 인식시스템에 적용 가능하다.
후 기
이 연구는 지식경제부와 한국산업기술재단의 전 략기술인력양성사업, 지식경제부 에너지자원기술 개발사업(2006ETR11P091C), 산업원천기술개발 사 업(No. 10039673), 2011년도 정부(교육과학기술부)의 재원으로 한국연구재단의 지원(No. 2011 - 0017495) 을 받아 수행된 연구임.
References
1) K. Chu, J. Han, M. Lee, D. Kim, K. Jo, D. Oh, E. Yoon, M. Gwak, K. Han, D. Lee, B. Choe, Y. Kim, K. Lee, K. Huh and M. Sunwoo,
“Development of an Autonomous Vehicle: A1,”
Transactions of KSAE, Vol.19, No.4, pp.146-
154, 2011.
2) T. D. Vu, J. Burlet and O. Aycard, “Grid-based Localization and Local Mapping with Moving Object Detection and Tracking,” Information Fusion, Vol.12, Issue 1, pp.58-69, 2011.
3) M. Darms, P. Rybski, C. Urmson, C. Inc and MI. Auburn Hills, “Classification and Tracking of Dynamic Objects with Multiple Sensors for Autonomous Driving in Urban Environments,”
Intelligent Vehicle Symposium, IEEE, pp.1197- 1202, 2008.
4) K. Jo, K. Chu, K. Lee and M. Sunwoo, “Inte- gration of Multiple Vehicle Models with an IMM Filter for Vehicle Localization,” Intel- ligent Vehicles Symposium, IEEE, pp.746-751, 2010.
5) K. Jo, K. Chu and M. Sunwoo, “Interacting Multiple Model Filter-based Sensor Fusion of GPS with In-vehicle Sensors for Real-time Vehicle Positioning,” Intelligent Transportation Systems, IEEE Transactions on, Vol.13, Issue 1, pp.329-343, 2012.
6) Welch and G. Bishop, “An Introduction to the Kalman Filter," University of North Carolina at Chapel Hill, NC, 1995.
7) E. A. Wan and R. Van Der Merwe, “The Un- scented Kalman Filter for Nonlinear Estima- tion,” Adaptive Systems for Signal Processing, Communications, and Control Symposium, AS-SPCC, IEEE, pp.153-158, 2000.
8) Y. Bar-Shalom, Multitarget-Multisensor Tracking:
Advanced Applications, Artech House, USA, Vol.1, 1990.
9) D. Kim, J. Han, M. Lee and M. Sunwoo, “De- tection and Tracking of Moving Objects with a Laser Scanner on Grid Map for an Autonomous Vehicle,” KSAE Annual Conference Proceedings,
김동철․한재현․선우명호
pp.65-68, 2009.
10) A. Petrovskaya and S. Thrun, “Model based Vehicle Detection and Tracking for Auto- nomous Urban Driving,” Autonomous Robots, Vol.26, pp.123-139, 2009.
11) D. Musicki, R. Evans and S. Stankovic,
“Integrated Probabilistic Data Association,”
Automatic Control, IEEE Transaction, Vol.39, pp.1237-1241, 1994.
12) C. Premebida and U. Nunes, “Segmentation and Geometric Primitives Extraction from 2D Laser Range Data for Mobile Robot Appli-
cations,” Robotica, pp.17-25, 2005.
13) D. Streller and K. Dietmayer, “Object Tracking and Classification using a Multiple Hypothesis Approach,” Intelligent Vehicle Symposium, IEEE, pp.808-812, 2004.
14) S. S. Blackman and R. Popoli, Design and Analysis of Modern Tracking Systems, Artech House, USA, Vol.685, 1999.
15) Y. Bar-Shalom and X. R. Li, Estimation and Tracking - Principles, Techniques, and Software, Artech House, USA, 1993.