<응용논문> pISSN 1226-0606 eISSN 2288-6036
AR 환경에서의 지진 정보 가시화 방안 연구
배성훈
1
· 정기철2
· 김은희3†
1
(주)부품디비 기술연구소,2
(주)부품디비 M&S 그룹,3
세종대학교 국방시스템공학과A Study on the Visualization of the Earthquake Information in AR Environments
Seonghun Bae
1
, Gichul Jung2
, and EunHee Kim3†
1
Research Center, PartDB Co., Ltd.2
M&S Group, PartDB Co., Ltd.3
Defense Systems Engineering Dept., Sejong UniversityReceived 2 June 2014; received in revised form 27 August 2014; accepted 29 August 2014
ABSTRACT
The earthquake is a natural disaster causing loss of life or property damage and happens more often in Korea recently. Moreover, considering the increase of massive buildings, it is required to predict and visualize the information of the vibration in a building. In this paper, we devel- oped a prototype framework to visualize the displacement information in the AR environments.
In order to avoid the irregular halts of the scene and the unnatural distortion of the object, this framework uses the synchronization method at the scene update time and the interpolation of the sensor data for the displacement of vertices. In addition, we studied displacement estima- tion methods with the acceleration data to extend this framework to the system with accelera- tors.
Key Words: AR (Augmented Reality), Displacement estimation, Earthquake visualization
1. 서 론
지진은 전세계적으로 많은 재산과 인명 피해를 가져오는 자연 재해로써, 최근 국내에서도 그 발 생 빈도가 증가하고 있어서 불안감을 더하고 있다 - 서울 강변 테크노마트 진동 사건은 지진으로 오 해 받기도 하였다. 더불어 건축물의 대형화가 확 산됨에 따라 대형건축물의 진동 정보를 예측하고 가시화 해야 할 필요성이 더욱더 대두되고 있다.
이러한 추세에 맞추어 실제 건축물과 계측진동 정 보를 표현하는 가상 건축물을 동시에 가시화 할 수 있다면 그 효과는 극대화 될 것으로 생각된다.
대부분의 증강현실(Augmented Reality, AR)에 관 한 기존 연구들이 실 환경과 메타 정보 또는 3D 모델을 증강시키는 방안을 제시하고 있는데 비해, 본 연구는 엔지니어링 기반 계측정보를 실 환경에 증강시켜 가시화 하는 방안을 제안하고자 한다
[1-5]
. 본 연구는 현재 3차 년도 사업이 수행되고 있는 국토 해양부 첨단도시개발사업의 2차 년도 내용 으로, 1차 년도에 수행된 선행연구를 바탕으로 진 행 되었다. 선행연구에서는 계측정보의 AR 병합†Corresponding Author, [email protected]
©2015 Society of CAD/CAM Engineers
개발도구 조사와 지진 변위 정보 가시화 방안에 대한 기초 연구가 수행되었으며
[6]
, 이를 기반으로 본 연구에서는 실제 수집된 변위 정보를 이용하여 AR 기반으로 가시화하는 프레임워크의 프로토타 입을 개발하였다. 가시화에 필요한 형상 정점 별 위치 제어 알고리즘 및 시간 단위 별 정점제어 알 고리즘이 개발, 구현되었으며, 향후 가속도 센서 를 기반으로 한 시스템으로 확장 할 수 있는 기반 으로써 가속도 정보에 의한 변위 추정 기법이 연 구 되었다.2. 관련 선행 연구
2.1 계측정보의 AR 병합 개발도구 조사 정합 기술(registration)은 증강 현실을 이용할 때 현실에 보여지는 액정(영상) 화면 속에 임의의 가 상정보 창을 생성하여 액정화면과 가상정보 창이 상황과 위치에 맞게 조정되도록 하는 기술이다. 영 상을 정합하는 방법에는 영상 내에 존재하는 점, 모서리, 선 등과 같은 특징적 구조체를 추출하여 정합하는 특징기반 영상 정합(feature-based image matching)이 주로 사용된다. 이 방법은 영상의 특 징을 추출하는 단계와 정합하는 단계로 구성되 며, 정합은 다음과 같이 세 가지로 구분된다.
(ㄱ) 기하학적 좌표들을 맞추어 형성하는 기하 학적 정합
(ㄴ) 광학적 성질을 맞추어 형성하는 광학 정합 (ㄷ) 사용자가 보는 각도 변화 등으로 일어나는
시간대 별 정합
증강현실에서 정합은 오차를 최소화하여 현실
에 가깝게 맵핑하는 것이 목적이며, 이러한 정합 을 구현하기 위한 다양한 도구들이 개발되어 있다.
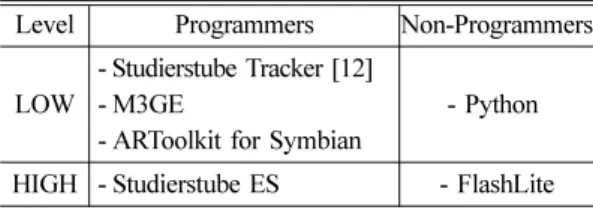
Table 1에는 모바일 환경 기반의 개발도구들을 정리하였으며, Table 2에는 PC 환경 기반의 개발 도구들을 정리하였다.
2.2 지진 변위 정보 가시화 방안 연구
가시화에 사용될 안정정보는 사회 기반시설에 설치된 지진 계측기로부터 추출된 정보를 활용하 였으며, 이 정보에는 다음과 같은 내용이 포함된다.
(ㄱ) 측정 위치(GPS 좌표) (ㄴ) 시간대별 측정정보 (ㄷ) 변위정보(X, Y, Z 좌표)
이 교량 안정정보는 계측되는 위치와 교각 위치 를 연계하여 즉각적으로 가시화 할 수 있다. 가시 화는 AR 영상에 표시되는 교각의 위치를 블록 별 로 그룹화하고 계측된 정보를 교각의 위치에 따른 변위 정보로 표현함으로써 가능하다. 또한 변위에 대한 경보 범위를 설정하여 범위를 벗어난 경우, 교량의 컬러 변경 등을 통해 신속히 경고를 발생 시킬 수 있다. Fig. 1에 계측정보를 AR 병합한 예 를 제시하였다.
3. 정보 가시화 기법
3.1 변위 가시화
본 연구의 개발 대상인 가시화 시스템은 Fig. 2 에서 나타낸 바와 같이 AR 가시화 프레임워크, 지 진계측 DB 및 AR 가시화용 통합 모델로 구성된 다. 이 중 본 연구의 중심인 AR 가시화 프레임워 크에서 계측 정보를 가시화 하기 위해 요구되는 기능은 실 환경과 VR 환경의 병합, 카메라를 통 한 실 환경 촬영, 마커(Marker)를 통한 실 환경의 Table 1 AR Toolkit for mobile platform
Level Programmers Non-Programmers
LOW
- Studierstube Tracker [12]
- M3GE
- ARToolkit for Symbian
- Python
HIGH - Studierstube ES - FlashLite
Table 2 AR Toolkit for PC platform
Level Programmers Non-Programmers LOW - ARToolkit
- arTag
- DART [9]
- ComposAR HIGH - Studierstube
- osgART
- AMIRE - MARS
Fig. 1 An example view of AR implementation with the measurement information
병합, 계측 변위 데이터의 표현 등이다.
AR 가시화 프레임워크는 카메라의 마커 인식을 통해 실 환경과 가상환경의 병합을 수행하고, 가 상환경에 계측된 변위 데이터를 가시화하는 기능 을 수행한다. 이를 위하여 소프트웨어의 아키텍처 는 Fig. 3과 같이 구성하였다. Windows OS 환경 기반에 오픈소스인 Ogre3D SDK와 ARToolkit을 이용하고 Maker Camera 제어를 위한 FlyCap 라 이브러리를 이용하여 AR 환경을 구축하였다. 또 한, 계측정보가 저장되어 있는 원격 데이터베이스 와의 연계를 위한 인터페이스를 구성하였다.
지진계측 데이터베이스는 지진 계측정보를 포 함하기 위함이며, 개발된 가시화 프레임워크는 이 데이터베이스 서버에 원격 인터페이스를 통해 접 근하여 정보를 취득한다. 본 연구는 실제 대상 건 축물에 계측 센서를 부착하여 데이터를 취득하기 전 단계이므로, 업체로부터 제공받은 타 건물에 대 한 연구용 계측 데이터를 이용하여 개발을 진행하 였다. 데이터베이스 서버에는 수집된 GPS 방식의 변위 데이터가 수집되어 있다.
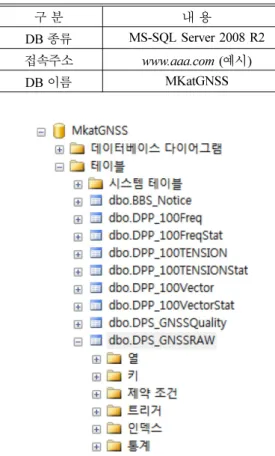
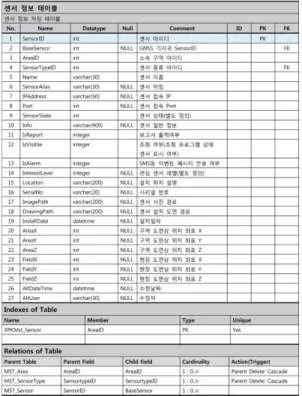
계측 센서의 데이터베이스는 Table 3에서 주어 진 바와 같이 MS-SQL Server 2008 R2의 데이터 베이스와 접속하게 된다. 상세 데이터베이스의 테 이블은 Fig. 4와 같으며, X, Y, Z의 3축에 대한 변
위 데이터는 GNSSRAW 테이블에 포함이 되어 있 다. 상세 데이터 베이스 스키마는 테이블 4에 제 시하였다.
데이터는 0.1초 간격으로 계측되어 저장되었으 며, 동일 평면상의 총 4개 센서의 데이터 세트로 이루어져 있다. 센서에 따라 간헐적 공백, 즉 미측 정 구간이 존재하여, 센서 마다 데이터 양이 상이 한 점이 있다. 총 데이터의 수는 3,687,806개로, 1개 센서로부터의 데이터가 약 14.6시간의 연속 시간에 대한 데이터를 가지고 있다.
VR 가상 환경에서 모델의 형상을 가시화하기 위한 형상 제어용 모듈에는 센서 계측 시간의 비 동기화에 의한 제약을 보상하기 위한 시간 단위 (scene update time)별 정점 제어 기능과 센서 위치 의 공간적 제약을 보상하기 위한 형상 정점(Vertex) 별 위치 제어 기능이 포함되어 있다.
먼저, 시간 단위(Scene update)별 정점 제어 기 능은 서로 다른 센서들 간의 계측 주기의 상이함 과 동일 센서 내 계측 주기의 불규칙성(비 계측 구 Fig. 2 Functional blocks of the visualization system
Fig. 3 S/W architecture of AR visualization system
Table 3 Remote database of the sensors
구 분 내 용
DB 종류 MS-SQL Server 2008 R2
접속주소 www.aaa.com (예시)
DB 이름 MKatGNSS
Fig. 4 Database table of the sensors
간의 존재 등) 등에 의해 나타나는 시간적 비동기 성을 제거하고, 원격 DB 처리와 네트워크 전송 및 렌더링을 위한 시간 지연에 의해 나타나는 가시화 화면의 비정상적인 거동과 끊김 현상을 없애기 위 한 기능이다. 이 기능은 버퍼링과 리샘플링 (resampling)을 통해 구현되었다. 즉, 원격 데이터 베이스로부터 10개(정상적인 계측 시간으로 약 1초)의 데이터를 버퍼링하고, 가상환경의 씬(Scene, 렌더링 장면) 업데이트 시간에 맞추어 리샘플링하 여 가시화를 수행하였다. 리샘플링은 측정 시간 간 격이 충분히 짧다고 가정하여 가까운 데이터로부 터 내삽하여 수행하였으며 다음의 식으로부터 계 산되었다.
(1)
여기서 t
k
와 tk+1
은 각각 센서의 계측 시간, m(tk
)와 m(tk+1
)은 이 때의 계측값들이다. 또한, ts,i
는 씬 업 데이트 시간이며, tk
≤ ts,i
≤ tk+1
이다.가상환경의 시간(VR 시간)에서는 버퍼링 시간 과 렌더링 시간이 더해져서 지연된 만큼의 가상환 경의 가시화가 이루어진다.
형상 정점 별 위치제어 기능은 계측정보 데이터 베이스로부터 수신되는 변위 정보가 제한된 수의 센서 위치들에 한정되어 있어서, 가시화 수행 시 주변 정점들에 부자연스러운 일그러짐을 발생시 키는 문제를 해결하기 위해 적용된다. 가시화를 위 한 것이므로, 실제 건축물의 복잡한 부재 해석보 다는 센서의 위치와 정점의 위치로부터 평면 선형 보간 방법을 적용하였다.
평면 선형 보간은 Fig. 5와 같이 최소3개의 센서 위치로 형성되는 평면 위에 x, y 방향으로 일정한 정점들을 생성하는 경우, 2단계로 수행될 수 있 다. 먼저, 각 두 센서마다 연결 직선에서 정점이 존재하는 그리드에 해당하는 값들(x grid r, y grid c)을 센서신호로부터 1차 보간 하여 아래와 같이 구한다.
(2)
여기서 이다. 이때, 내분점
의 위치는 다음과 같이 나타난다.
(3) 이로부터 각 정점의 값들을 아래와 같이 x 방 향 또는 y 방향으로 2차 보간하여 구할 수 있다.
평면이므로 어느 방향으로 보간하여도 값은 동 일하다.
m t( )
s i ,
m t( ) tk
(k 1 +
–ts i,
) m t+ (k 1 +
) t(s i ,
–tk
) tk 1 +
–tk
---
=
m
BC y2 ,
t() αm=B
t() 1 α+( – )mC
t() mAC x3 ,
t() βm=A
t() 1 β+( – )mC
( )tα y
2
–yC
yB
–yC
---, β x
C
–x3
xC
–xA
---= =
x
BC y2 ,
=αxB
( ) 1 αt +( – )xC
x
AC x2 ,
=βxA
t() 1 β+( – )xC
Table 4 Database scheme of Instrument Sensor
Fig. 5 A Planar interpolation with three measurements
(4)
여기서, 이다.
이러한 방법은 평면을 형성하는 최소 개수가 3임을 고려한 일반적인 방법이며 보간 방법은 센 서위치와 정점 위치 결정에 의해 변경될 수 있다.
본 연구 단계에서는 Fig. 6과 같이 4개의 센서를 동일 평면상에 배치하고, 내부 정점을 선택하여 더 욱 단순화 하였다.
높이가 동일한 평면내의 (x
1
,y2
), (x2
,y2
), (x1
,y1
), (x2
,y1
) 위치의 센서 A, B, C, D에 대하여 시간 동 기화가 수행된 측정값 mA
(ts,i
), mB
(ts,i
), mC
(ts,i
), mD
(ts,i
) 들로부터 (xv
,yv
) 위치 내부정점의 보간값 mv
(ts,i
)을 아래와 같이 계산하였다.(5)
여기서, 이다.
정점제어를 위한 초기화 루틴은 Fig. 7과 같은 순서로 수행되었다.
먼저 형상 모델을 읽어 들이고, 형상 모델의 정 점버퍼를 활성화하여 정점버퍼 내의 정점의 위치 정보를 기록하였다. 실제 계측 센서 위치에 따라 가상 환경의 센서 위치를 설정하고 정점제어를 위 한 변수들을 등록하였다. 다음으로, 설정된 센서 위치에 따라 정점들을 분류하여 제어를 위한 초기 화를 수행하였다. 마지막으로 초기화 완료를 위해
정점 버퍼를 비활성화(Close)하여 그래픽 카드의 오류를 방지하도록 하였다.
정점 제어를 위한 메인 루틴은 Fig. 8과 같은 순 서로 수행되었다. 먼저, 원격지에 있는 DB에 접속 하고 접속 유무와 변위 정보의 존재 유무를 확인 하는 기능을 수행하고, 유효성을 체크하였다. 계 측 정보 데이터베이스로부터 변위 정보가 정상적 으로 취득되면 정점버퍼를 활성화하고 생성한 정 점 제어용 변수에 입력하였다. 데이터가 입력된 정 점 제어 변수로부터 씬(Scene)에 출력된 형상의 제 어를 수행하였다. 마지막으로 제어가 완료된 후에 는 정점버퍼를 비활성화하여 오류를 방지하였다.
m
x
3y
3t() γm=BC y2 ,
( ) 1 γt +( – )mAC y2 ,
t() κmAB x3 ,
t() 1 κ+( – )mAC x3 ,
t()=
γ x
3
–xAC y2 ,
xBC y2 ,
–xAC y2 ,
---, κ y
3
–yAC x3 ,
yAB x3 ,
–yAC x3 ,
---= =
m
v
( )ts i,
=[αmA
( ) 1 αts i ,
+( – )mB
( )ts i ,
]β αmC
( ) 1 αts i ,
+( – )mD
( )ts i,
[ ] 1 β( – )
α x
2
–xv
x2
–x1
---, β y
v
–y1
y2
–y1
---= =
Fig. 6 Location of sensors and vertices
Fig. 7 Flow chart of the vertex initialization
Fig. 8 Flow chart of the vertex control
계측 변위 데이터를 기반으로 한 형상 제어용 모듈을 실험하기 위하여 Fig. 9와 같은 단순한 형 상 모델을 구상하였다.
모델은 상단 면의 각 4개의 꼭지점에 센서를 가 지고, 각 모서리 내에 5개 정점을 가진 가로 20(m), 세로 30(m), 높이 100(m) 크기의 직육면체로서, 각 면을 Quad-angle 폴리곤 16(4 × 4)개의 격자모델 로 총 96개의 폴리곤으로 구성하였다. 계측센서의 좌표에 해당 하는 위치를 인식시키기 위해 격자모 델 메시의 인덱스 버퍼에 접근하여 최상단 4개 지 점의 정점 버퍼에 계측센서의 위치를 할당하고, 변 위 정보를 연결하여 실험하였다. 이러한 모델에 대 하여 형상 제어 모듈을 적용하여 가시화한 결과는 Fig. 10과 같다.
좌측 로그 창에는 접속한 데이터베이스의 변위 정보를 출력하고 있으며, 우측 3D 창에는 변형된
형상 모델을 보여 주고 있다. 상단 이미지는 계측 데이터베이스의 변위 정보를 1:1 스케일로 출력하 고 있으며, 하단 이미지는 가시화의 증대를 위해 5배를 증폭한 변위로 출력하고 있다. 지진 등에 의 한 변위는 실제 건축물에 비해 상대적으로 매우 작기 때문에 변위를 증폭하여 전시하는 기능이 필 요할 것으로 예상된다.
지진계측 데이터베이스에는 0.1초 간격으로 계 측된 데이터 정보가 기록되어 있어서 1초당 10 frame의 데이터 출력이 가능하였다. 개발된 가시 화 프레임워크는 최대 60 fps(frame per second)를 출력할 수 있다. 데이터베이스의 변위 정보를 동 기화한 후 보간 알고리즘을 적용하였을 때 약 55 fps 의 성능을 나타내었다.
AR 병합을 위한 시스템은 Fig. 11과 같이 구성 하였다. 즉, 마커 인식을 위한 카메라, 대상건축물 인식을 위한 병합 대상, 사용자 입력을 위한 입력 도구를 구성하였으며 그 상세 사양은 Table 5에 나 타내었다. 마커는 실제 환경과 가상 환경을 병합 하기 위해 사용되었으며, 이를 인식하기 위한 카 메라로는 Point Grey사의 FL2G-13S2C-C를 사용 하였다. 사용자 입력은 키보드나 마우스 없이도 변위 정보를 쉽게 연결할 수 있도록 리프 모션 (Leap Motion)이라는 모션 인식 디바이스를 사용 하였다.
Fig. 9 Test model for visualizing the displacement
Fig. 10 Visualization of the instrument displacement Fig. 11 Components for AR merge
일반적으로 마커는 실물 위 또는 실물 주변에 부착하여 카메라로 인식하고 격자모델을 증강시 키는 방법으로 사용되나, 본 연구에서는 증강할 대 상 건축물이 아직 선정되기 전이므로 대체 인식체 로 건물의 사진인 액자를 제작하고 특정 위치에 마커를 부착하였다. 마커를 감지하면 이를 기준으 로 정해진 위치에 격자모델을 증강하였으며, 같은 방식으로 향후 대상 건축물이 선정이 되었을 경우 에도 마커를 부착하여 증강하는 것이 가능하다. 만 약 사진을 찍은 위치가 달라지면 마커를 변경하여 야 하며 이는 마커를 가진 실물 대상 건축물을 조 망하는 위치가 달라지는 것과 같은 효과이다. 이 경우, 3차원 패턴을 가진 마커의 변화를 인식하여, 위치와 회전의 측정하고 이로부터 격자모델을 이 동 및 회전 변환하여 증강한다.
AR 가시화 환경 동작을 위한 시나리오는 Fig.
12와 같이 구상하였다.
먼저 카메라가 대상물의 마커를 인식하면, 마커 를 기준으로 격자모델을 병합한다. 사용자가 동작 인식 장치에 명령을 입력하면, 지진계측 DB에 연 결을 수행하고, 가시화 프레임워크에 지진변위 정
보가 포함되어 실제 환경의 영상에 정합되어 가시 화 된다.
시나리오에 따라 Fig. 13과 같이 전체 시스템을 구축하여 테스트를 수행하였다. 가시화 프레임워 크를 탑재한 PC와 연결된 CCD 카메라로 동일한 PC에 연결된 디스플레이에 실제 영상과 가상 건 축물이 병합되어 전시되었다. 사용자가 모션 디바 이스로 명령을 전달하면 병합된 가상 건축물에 취 득된 원격 데이터베이스의 변위 정보가 가시화 되 었다. 그림 중앙에 보이는 디스플레이에서 병합된 결과를 확인할 수 있다.
3.2 가속도 정보에 의한 변위 추정
구조물의 변위를 측정하는 방법은 크게 직접측 정과 간접추정으로 나눌 수 있다. 직접 측정 방법 은 정확도 높은 반면, 반드시 기준점이 필요하므 로 대형의 건축, 토목구조물에는 적용이 어렵다.
가속도계 등을 통하여 수행되는 간접추정 방법은 직접측정 방법보다 일반적으로 정확도가 떨어지 지만 계측이 편리하고 비교적 저비용으로 사용될 수 있다. 이를 위하여 최근 MEMS 등의 센서 기 반의 가속도계에 대한 연구들이 진행 중에 있다
[8-11]
. 앞 절에서는 변위정보가 직접적으로 주어진 경 우에 대하여 기술되어 있으나, 본 절에서는 개발 된 가시화 프레임워크에 가속도 정보가 주어지는 경우를 위한 변위 추정 기법을 정리하였다. 이론 적으로 변위는 가속도를 두 번 적분하여 계산 될 수 있으나, 적분 기법은 초기값과 측정 오차에 매 우 취약하다. 특히 측정 오차는 누적되어 작용하 게 되어 추정된 변위에 심각한 영향을 줄 수 있다.측정 오차를 처리하는 기법은 적용될 시스템의 동적 특성을 고려하여 선택되어야 한다. 즉, 가속 도계의 출력 신호 중에서 적용될 시스템의 동적 Table 5 Description of components for AR merge
구성품 사양 용도
CCD Camera /설치 지그
Point Grey FL2G-13S2C-C
· 실 환경 및 마커 인 식용
· 설치 기구부를 마련하 여 안정된 영상 취득 대상건축물
인식체 Image & Maker · 실 환경 병합 대상
· 특정 위치 마커 부착 Motion 인식
디바이스 Leap Motion · 사용자 명령 입력 도구
Fig. 12 Scenarios for AR merge
Fig. 13 Full test of AR visualization system
특성과 관련없는 주파수 성분을 제거하고 관심있 는 성분을 추출하여야 한다.
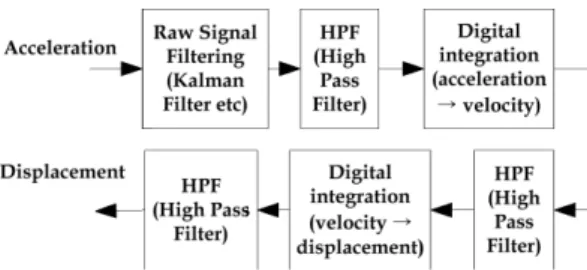
Tan 등의 논문에서는 MEMS 기반 가속도계로 부터의 변위를 추정하여 로봇 팔에 적용하였다
[13]
. 주어진 로봇 시스템의 동적 모델 및 운동 특성을 고려하여, 칼만 필터 또는 저 대역 통과 필터를 통 해 가속도의 고주파 성분을 제거하고 고역 통과 필터(High Pass Filter) 를 설계하여 저주파오차 성 분을 제거하였다. Fig. 14에 신호 처리 과정을 도 시하였다.Lee 등의 논문에서는 변위를 재구성하는 문제를 경계 조건 문제로 표현하고 아래 식 (6)과 같은 최 적화 함수를 제안하였다
[13]
.(6)
여기에서 u, ∆t, 는 각각 추정된 변위, 시간 간 격, 측정 가속도를 의미하며, L
a
와 Lc
는 각각 시간 창 크기에의 해에서 결정되는 사다리꼴 적분 연산 자와 2차 미분연산자, 는 벡터의 2-norm, 그리 고 λ는 최적정규화 계수이다. 그러나 이 또한 결 과적으로는 제안된 함수를 최적화 하는 변위는 계 측된 가속도에 대역 필터를 적용한 형태의 데이터 로 구해진다. 제안된 방식은 이동 시간 창(moving window)을 적용하여 변위를 재구성하고 있으며, 창의 크기로부터 선정된 최적 정규화 계수(λ)를 적 용하고 있는데, 이동 시간 창은 측정하고자 하는 가속도성분의 주파수 대역(또는 주기)에 의해 정 해 진다.이러한 필터 및 적분 기능은 기존 아날로그 방 식의 회로를 디지털 신호처리가 대체하면서 더욱 효과적으로 구현 가능해 지고 있다. 최근 아날로 그-디지털 변환기(AD converter)의 속도가 점차 빨 라지고, 데이터의 비트수도 늘어나고 있으며, 이
를 지원하기 위한 데이터 전송 버스 및 신호 처리 를 위한 프로세서들도 고속화되고 있다. 따라서 칼 만 필터 등의 고급 알고리즘의 구현도 용이해지고 있으며, 특히 기존의 시간 영역에서의 적분기를 FFT(Fast Fourier Transform)를 이용하여 주파수 영역에서의 구현 가능하게 되었다. 그러나, 주파 수 영역에서의 처리방식은 일정 시간 동안의 데이 터를 한꺼번에 처리하는 방식으로 이루어지므로, 실시간의 빠른 응답 속도를 요구하는 서보 시스템 등에서는 적용하기 어려울 것으로 예상된다.
본 연구에서 개발하는 시스템은 구조물의 진동 을 측정하고 가시화하는 것을 목적으로 하고 있 다. 즉, 측정하고자 하는 구조물은 동적 특성상 고 주파의 응답특성을 가지기 어렵고, 위치가 고정되 어 있으므로, 측정 및 가시화하고자 하는 변위는 특정 위치(zero)를 중심으로 진동하는 형태이며 이 때의 진동 폭과 주기가 가시화의 주요 관심사이 다. 또한, 측정된 변위에 의한 빠른 응답을 요구하 는 것이 아니며, 오히려 일정 시간 이상의 관측에 의한 통계적 가시화에 초점이 있다고 할 수 있다.
따라서, 고주파 성분과 저주파 드리프트(Drift)를 제거하도록 가속도 신호의 대역을 선택하고 주파 수 영역에서 디지털로 처리하는 방식을 선택하여 구현할 수 있을 것으로 판단된다.
4. 결 론
본 연구는 AR 환경 하에서 지진에 의한 변위 정 보를 효과적으로 가시화 하기 위한 것으로, AR 기 반 가시화 프레임워크의 프로토타입을 개발하였 다. 변위 정보를 안정적으로 가시화하기 위해 형 상 정점 별 위치 제어와 시간 단위 별 정점 제어 를 적용하였으며, 실제로 수집된 변위 정보를 가 진 원격 데이터베이스 연동한 AR 병합 시스템을 구성하여 실험한 결과를 보였다. 또한 향후 MEMS 센서 기반의 가속도 정보로 확장할 수 있도록 하 기 위하여, 가속도에 의한 변위 추정 기법에 대해 분석하였다. 이를 통하여 가속도 정보에 의한 실 시간 가시화 프레임워크를 개발할 수 있을 것으로 기대한다. 현재 3차년도 사업이 진행 중이며, 실제 복잡한 대형 건축물 형상의 처리와 에지(edge)인 식을 통한 마커리스(Markerless) 병합에 대한 연구 가 수행되고 있다.
min
u
Π 12---L
a
{Lc
u–( )Δt2
a}2 2
λ2
---2 u2 2
+=
a
·
2
Fig. 14 A Processing chain of the displacement estimation
감사의 글
본 연구는 국토해양부의 첨단도시개발사업(12 첨단도시C11, 2차년도)에 의하여 수행되었습니 다. 저자는 연구비 지원에 깊은 감사의 말씀을 전 합니다.
References
1. Choi, H.S., Jeon, S.S. and Hong, J.S., 2013, Development of a Surgical Navigation System Using Augmented Reality, Proceedings of the Society of CAD/CAM Engineers Conference, pp.424-428.
2. Chu, S.Y., 2010, A Study on Application of Augmented Reality Technology to BIM based Architectural Design, Proceedings of the Society of CAD/CAM Engineers Conference, Workshop 1-2.
3. Jang, H.R., Ham, N.H. and Kim, J.J., 2012, A Study on Augmented Reality Technology of Architectural BIM Model Based, Proceedings of the Society of CAD/CAM Engineers Confer- ence, pp.512-517.
4. Park, S.Y. and Choi, J.W., 2005, A Study on the Applications of the Augmented Reality Tech- nology for Effective Information Management in Existing Buildings, Journal of Architectural Institute of Korea, 21(8), pp.37-44.
5. Seo, D.W., Lee, J.Y. and Lee, S.M., 2013, Fin- gertip Touchable Augmented Reality Interface for Natural Interactions with Virtual Objects, Proceedings of the Society of CAD/CAM Engi- neers Conference, pp.223-226.
6. Hwang, J.S. and Jung, G.C., 2013, Visualization of Infrastructure Information Using for AR Infor- mation and Method of Merging for Safety Infor- mation, Proceedings of the Society of CAD/CAM Engineers Conference, pp.667-669.
7. Song, I.H., Yang, J.S., Jo, H.J. and Choi, S.S., 2008, Development of CAE Data Translation Technique for a Virtual Reality Environment, Transactions of the Society of CAD/CAM Engi- neers, 13(5), pp. 334-341.
8. Sim, S.H., Park, J.W., Jung, H.J., and Billie F.
Spencer, Jr., 2012, Use of Smart Sensors for Acceleration-based Displacement Estimation, Proceedings of Computational Structural Engi- neering Institute of Korea, pp.602-605.
9. Lee, B.R., 2014, Efficiency Test for Low Electric Power Type and MEMS Based 3-axis Acceler- ometer, Journal of the Korea Institute for Struc- tural Maintenance and Inspection, 18(1), pp.160- 165.
10. Hong, Y.H. and Lee, H.S., 2008, A Displacement Reconstruction Scheme and Accuracy Analysis using Measured Acceleration, Proceedings of the Korean Society of Civil Engineers, pp.343-346.
11. Kim, E.M., Lim, S.B., Choi, Y.C. and Choi, M.H., 2006, A Mobile AR System for 3D Virtual Building Simulation Based on GPS and Accel- erometer, Proceedings of the Korea Society for simulation Conference, pp.48-52.
12. Tan She Young and Park, S.H., 2013, Displace- ment Estimation using MEMS Accelerometer for Low Frequency Motion, Journal of The Korean Institute of Information and Communi- cation Engineering, 8(6), pp.831-837.
13. Lee, K.H., Lee, J.M., Kim, D.G., Han, Y.S. and Lee, J.J., 2008, Development Technology of Vision Based Augmented Reality for the Main- tenance of Products, Transactions of the Society of CAD/CAM Engineers, 13(4), pp.265-272.
14. Park, K.P., Cho, Y.O., Ha, S. and Lee, K.Y., 2010, Acceleration based Passenger Evacuation Simulation Considering Rotation of Passenger on Horizontal Plane, Transactions of the Society of CAD/CAM Engineers, 15(4), pp.306-313.
15. Lee, J.H. and Lee, J.Y., 2013, Analysis of the Research on Augmented Reality Using Knowl- edge Domain Visualization based on Co-Citation Analysis, Transactions of the Society of CAD/
CAM Engineers, 18(5), pp.309-320.
16. Lee, K.H., Kim, D.G., Park, J.H. and Kim, D.S., 2007, Augmented Reality in Shipbuilding Indus- try, Proceedings of the Society of CAD/CAM Engineers Conference, pp.408-412.
17. Rhee, G.W., Seo, D.W. and Lee, J.Y., 2006, Maintenance Simulation Service Using Aug- mented Reality in Ubiquitous Environments, Pro- ceedings of the Society of CAD/CAM Engineers Conference, pp.302-308.
배 성 훈
2001년 울산대학교 항공우주공학과 학사
2008년 울산대학교 자동차선박기술 대학원 생산기술 석사
2004년~2010년 TEMS 기술연구소 소장
2011년~현재 ㈜부품디비 기술연구 관심분야: IT-based intelligent소 팀장 engineering System, Project Lifecycle Management, Engin- eering Visualization, Virtual Reality
김 은 희
1995년 한국과학기술원 정밀공학과 학사
1997년 한국과학기술원 정밀공학과 석사
2004년 한국과학기술원 기계공학과 박사
2002년~2006년 LG전자 DS연구소 선임연구원
2006년~2007년 Magnum Semi- conductor 선임연구원
2007년~2013년 LIG넥스원, ISR 연구센터 수석연구원
2013년~현재 세종대학교, 국방시스 템공학과 조교수
관심분야: Modeling and Simulation, VV&A, System Engineering
정 기 철
2001년 충남대학교 화학과, 학사 2003년 충남대학교 화학과, 석사 2003년~2007년 ㈜액트 시스템사업부 2007년~2008년 ㈜에네시스 원자력
사업부
2009년~현재 ㈜부품디비 M&S그룹 관심분야: 3D Modeling and Simu-팀장 lation, configuration management system, Engineering visualization