DOI : 10.5394/KINPR.2011.35.3.197
대각도 받음각을 갖는 무인잠수정에 작용하는 동유체력 특성에 관한 실험적 연구
배준영*․김정중**․†손경호
* 동주대학, ** 한국해양대학교 대학원, †한국해양대학교 조선해양시스템공학부 교수
An Experimental Study on Characteristics of Hydrodynamic Forces Acting on Unmanned Undersea Vehicle at Large Attack Angles
Jun-Young Bae*․Jeong-Jung Kim**․†Kyoung-Ho Sohn
* Dept. of Shipbuilding Information, Dongju College University
** Korea Maritime University Graduate School
†Dept. of Naval Architecture and Ocean Systems Engineering, Korea Maritime University
요 약 : 회류수조에서의 대각도 정적(static) 모형실험을 통해 Manta형 무인잠수체에 작용하는 동유체력을 측정하였으며, 동유체력에 미치 는 Reynolds수의 영향을 고찰하였다. 이를 위해 동유체력을 cross-flow drag과 양력(lift force)으로 성분 분석을 하였으며, 양력 성분에는 Reynolds수의 영향을 무시하고, cross-flow drag 성분에만 Reynolds수의 영향을 고려하였다. 그 후 이들 두 성분을 다시 합성함으로써 실물 무인잠수정에 작용하는 동유체력의 추정 기법을 제시하였다.
핵심용어 : 무인잠수정, 회류수조 모형실험, 항력계수, Reynolds수 영향
Abstract : The authors adopt the Unmanned Undersea Vehicle(UUV), the shape of which is like a manta. They call here it Manta UUV.
Manta UUV has been designed from the similar concept of the UUV called Manta Test Vehicle(MTV), which was originally built by the Naval Undersea Warfare Center of USA(Lisiewicz and French, 2000; Simalis et al., 2001; U.S. Navy, 2004). The present study deals with the effect of Reynolds numbers on hydrodynamic forces acting on Manta UUV at large angles of attack. The large angles of attack cover the whole range of 0 to ± 180 degrees in horizontal plane and in vertical plane respectively. Static test at large attack angles has been carried out with two Manta UUV models in circulating water channel. The authors assume that the experimental results of hydrodynamic forces (lateral force, yaw moment, vertical force and pitch moment) are analyzed into two components, which are lift force component and cross-flow drag component. First of all, Based on two dimensional cross-flow drag coefficient at 90 degrees of attack angle, the cross-flow drag component at whole range of attack angles is calculated. Then the remainder is assumed to be the lift force component. The only cross-flow drag component is assumed to be subject to Reynolds number.entstly the authors suggest the methodology to predict hydrodynamic derivertives acting on the full-scale Manta UUV.
Key words : Unmanned Undersea Vehicle, Model experiment in circulating water channel, cross-flow drag, Effect of Reynolds number
* 종신회원, [email protected] 051)200-1556
** 연회원, [email protected] 051)410-4991
†교신저자 : 종신회원, [email protected] 051)410-4303
1. 서 론
미래의 해군력 증강을 위한 수중유도무기체계 개발의 일환 으로 다양한 설계 개념을 도입한 수중운동체 기술이 제안되고 있다.(Choi, 2008; Shin et al., 2005; Son et al., 2001; Yun et al., 2005). 미해군 소속 NUWC(Naval Undersea Warfare Center)에서는 MTV(Manta Test Vehicle)이라고 하는 Manta 형 무인잠수정을 개발하였다(Lisiewicz and French, 2000;
Sirmalis et al., 2001; U.S. Navy, 2004). MTV의 설계 개념을 기초로 하여 저자들은 Manta 형상의 UUV(이하 Manta UUV 라 함)의 운동 수학모델에 관해서 연구를 수행한 바 있다(Bae and Sohn, 2009; Bae et al., 2010).
한편, 모형실험 결과를 이용하여 수학모델을 구성하고 수치
시뮬레이션 기법을 통해 실물 수중운동체의 운동 특성을 규명
하기 위해서는 모형실험 결과로부터 구한 유체력미계수에 척
도효과 즉, Reynolds수의 영향을 고려할 필요가 있다. 수중운
동체 또는 선박의 경우 일반 조종운동의 범위 내에서의 받음
각(angle of attack)에 대해서는, 유체력미계수에 미치는
Reynolds수의 영향이 일반적으로 무시되어 왔다(Strom-
Tejsen, 1965). 그러나 Manta UUV의 경우 호버링(hovering)
운동 등에서와 같이 수직, 수평 받음각이 0° ∼ ± 180°의 영역
에 걸쳐서 운동이 일어날 수 있으므로, 대각도 또는 극한적인
받음각에서는 유체력미계수에 미치는 Reynolds수의 영향을
고려할 필요성이 대두될 수 있을 것이다. 지금까지 이에 관한 연구는 거의 수행되지 않았다.
이러한 배경 하에 본 연구에서는 수중운동체가 대각도 수 직, 수평 받음각을 받을 때 수중운동체에 작용하는 동유체력 을 측정하고, 측정 결과의 물리적 구성 요소를 분석하였으며, Reynolds수의 차이를 고려한 실물 수중운동체에 작용하는 유 체력미계수의 추정 기법을 논하였다.
2. 대각도 받음각에서의 동유체력 측정
2.1 실험에 사용된 모형 수중운동체의 명세
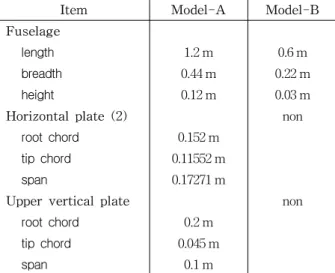
Manta UUV의 실물 크기를 1/10로 축소한 Model-A의 형 상과 주요 제원을 Fig. 1과 Table 1에 나타낸다. Model-A의 동체 측면에는 NACA0008 단면 형상을 한, 2개의 수평판이 설치되어 있고, 동체 상부 뒤쪽에는 수직판이 설치되어 있다.
(a) Horizontal plan
(b) Profile
Fig. 1 Drawings of Manta UUV(Model-A)
Table 1 Principal dimensions of Manta UUV
Item Model-A Model-B
Fuselage
length 1.2 m 0.6 m
breadth 0.44 m 0.22 m
height 0.12 m 0.03 m
Horizontal plate (2) non
root chord 0.152 m
tip chord 0.11552 m
span 0.17271 m
Upper vertical plate non
root chord 0.2 m
tip chord 0.045 m
span 0.1 m
Model-B는 horizontal plan을 Model-A와 동일하게 하였 으나, Model-A의 1/2 크기로 축소한 형상이다. 그리고 모형 의 단순화를 위하여 두께가 0.03 m의 평판 형상으로 제작하 였으며 부가물은 설치하지 않았다. Model-B는 속도의 영향 즉, Reynolds수의 영향을 실험적으로 검토하기 위해 채택하 였다.
2.2 좌표계
수중운동체를 강체라 가정하고 Fig. 2와 같이 수중운동체에 고정된 직각좌표계(물체고정좌표계)를 라 한다. 물 체고정좌표계의 원점은 수중운동체의 동체 중앙횡단면에서 동체 높이의 중간위치에 취하고, Manta UUV의 선수방향을
, 정횡우현방향을 , 선저방향을 축의 양(+)의 방향으로 정의한다. 본 연구에서 사용된 기호들을 Fig. 2에 나타낸다.
그리고 수중운동체에 대한 유체 유입각을 받음각이라 정의하 며, Fig. 2에서 는 수직 받음각, 는 수평 받음각을 나타낸 다. 이하 수직 받음각은 영각(inclined angle)으로, 수평 받음 각은 사항각(drift angle)으로 기술하기로 한다.
Fig. 2 Coordinate system and notation
2.3 실험장치
실험은 길이 12.5 m, 폭 2.2 m, 높이 5.2 m 인 임펠러 방식 의 수직 순환형 회류수조에서 수행되었으며, 회류수조 관측부 는 길이 5 m, 폭 1.8 m, 높이 1.2 m, 수심 0.9 m이다.
Fig. 3은 평균유속 0.8 m/sec에서의 수직방향 유속분포도와 수심 0.45 m 위치에서의 수평방향 유속분포도를 나타내고 있 다. 그 외 유속에서의 유속분포도 또한 이와 유사하다.
대각도 받음각에서의 동유체력 측정을 위한 실험장치와 Model-A의 실험 조건 등은 문헌(Bae et al., 2010)에 상세히 언급되어 있으므로 여기서는 생략한다. 그리고 Model-A에서 와 동일한 실험장치를 이용하여 Model-B의 영각시험을 수행 하였다. 이때 유속을 0.3 m/sec에서 0.8 m/sec (Reynolds수 : 0.18 × 10
6에서 0.45 × 10
6)까지 변화를 주며 실험을 수행하였 다.
한편, 회류수조는 모형의 크기에 비해 수조 폭이 제한적이
므로 실험 결과에 측벽효과(blockage effect)를 고려하여야 한
다. 본 연구에서는 Tamura(1972)가 제안한 식(1)을 이용하여
측벽효과를 고려하였다. 단, 측벽효과는 모형 부근에서 유속의 증가량으로써 표시된다.
(1) 여기서 : 유속의 증가량,
: 수조의 횡단면적,
: 모형 선이 설치된 상태에서의 모형선의 횡단면적, : 모형선이 설치 된 상태에서의 종방향 길이, : 수조의 폭을 나타낸다.
Fig. 3 Velocity distribution at working section of circulating water channel(
: mean velocity)
Model-A의 경우 사항시험에서는 가 약 1.8%, 영각시 험에서는 약 2.6% 정도이다. 그리고 Model-B의 경우 가 약 0.2%로 측벽효과에 의한 영향이 거의 없으므로 Model-B에서의 측벽효과는 무시하기로 한다.
2.4 동유체력 측정 결과
Model-A의 동유체력 측정 결과에 측벽효과를 고려하여 무 차원화된 형태로 힘과 모멘트를 Fig. 4와 Fig. 5에 나타낸다.
아울러 수학모델(Bae et al., 2010)에 의한 커브핏팅 결과를 함 께 나타낸다. Model-A의 부가물 유무에 따른 동유체력 측정 결과의 차이점에 대해서는 문헌(Bae et al., 2010)에서 이미 언 급하였다. 그리고 Model-B의 측정결과는 Fig. 6에 나타낸다.
여기서 힘은
으로, 모멘트는
으로 각각 무차원화 하였다(단, : 유체의 밀도, : 모형길이).
(a) sway force
(b) yaw moment
Fig. 4 Non-dimensional forces and moment obtained from static test on Model-A at large drift angles and fitting lines
(a) heave force
(b) pitch moment
Fig. 5 Non-dimensional forces and moment obtained from
static test on Model-A at large inclined angles and
fitting lines
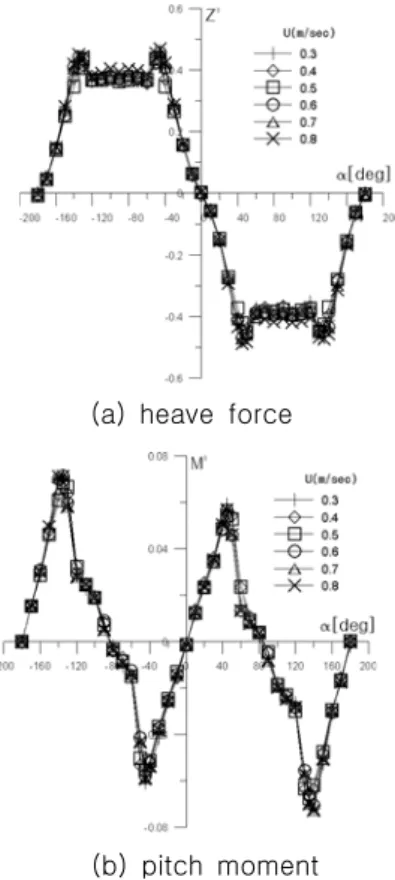
(a) heave force
(b) pitch moment
Fig. 6 Non-dimensional forces and moment obtained from static test on Model-B at large inclined angles and fitting lines
Fig. 6에서 동유체력 측정 결과는 Reynolds수의 영향을 거 의 받지 않는 것으로 나타났는데, 그 원인은 다음과 같이 생각 할 수 있다. 일반적으로 양력 성분의 경우 Reynolds수의 영향 을 받지않은 것으로 알려져 있다(Strom-Tejsen, 1965). Fig. 6 의 실험 결과에서도 소각도 범위의 영각에서는 Reynolds수의 영향이 없음을 알 수 있다. 그리고 Model-B의 경우 평판 형 상이기 때문에 90° 전후의 대각도 영각에서는 Reynolds수가 증가하여도 박리점(separation)이 변하지 않는다. 그 결과 cross-flow drag 계수는 Reynolds수의 영향을 받지 않는 것 으로 생각된다. Model-B의
(항력계수)는 1.25로서 원형평 판(thin circular disk)의
값 1.2와 크게 차이나지 않는다 (Vennard and street, 1982).
3. 동유체력 특성의 검토
3.1 동유체력의 성분 분석
대각도 받음각을 갖는 수중운동체에 작용하는 동유체력의 구성 성분을 분석해 본다. 받음각이 소각도 영역인 경우에는 세장체이론(Newman, 1978)에 의해 동유체력을 모델화 할 수 있으며, 이 때에는 양력 성분(이상유체력 성분과 점성 양력 성 분을 합하여 양력 성분으로 정의함)이 작용한다고 간주할 수 있다. 그리고 양력 성분은 받음각 0° (또는 180°) 부근에서는
직선적으로 변화하다가 받음각이 증가하여 약 30° ∼ 40° 부근 에서 3차원 vortex shedding에 기인하는 stall 현상에 의해 그 값이 변화한다. 그리고 받음각이 90° 부근에서 양력은 소멸되 고, 물체를 가로지르는 2차원 흐름에 의한 동유체력이 작용하 게 된다. 이 힘은 cross-flow drag으로 정의된다. cross-flow drag은 흐름의 상류 측에서 물체에 작용하는 압력항력 (pressure drag)과 흐름의 하류 측에서 물체 주위에 형성되는 후류(wake)에 기인된다. 그리고 후류가 시작되는 위치 즉, 박 리점(separation point)은 물체 형상과 Reynolds수에 따라서 달라진다. 일반적으로 물체 형상이 평판이 아닌 경우에는 Reynolds수가 클수록 박리점은 물체 후방으로 이동되는 경향 이 있다. 반면에 물체 형상이 평판인 경우에는 박리점이 평판 의 상부와 하부 모서리에 각각 위치하기 때문에 Reynolds수 가 증가하더라도 박리점의 위치가 바뀌지 않는다. 따라서 평 판의 경우 cross-flow drag 계수는 Reynolds수의 영향을 받 지 않는다. 이러한 내용은 2.4절에서도 언급된 바 있다. 이러 한 배경 하에 본 연구에서는 동유체력의 구성을 양력 성분과 cross-flow drag 성분으로 모델화 한다. 잠수체는 아니지만 선박의 경우 Umeda(1989)는 대각도 사항각에서의 동유체력 을 양력 성분과 cross-flow drag 성분으로 분석한 바 있다.
먼저 수평 받음각에서의 cross-flow drag은 식(2)와 같이 표시할 수 있다.
≈
(2)
≈
여기서 와
는 각각 수중운동체의 단면에서의 높 이와 수평방향 2차원 항력계수이다.
는 단면 위치에 따 라서 그 값이 약간씩 상이하지만, 본 연구에서는
를 일 정하다고 간주하여
로 표기한다.
는 수평 받음각이 90°
일 때의 항력계수를 의미한다. 수직 받음각을 갖는 경우에도 식 (2)와 유사한 형태로 나타낼 수 있다. 사항실험의 경우 ′ = cos
, ′ = -sin이고, 영각실험의 경우 ′ = cos, ′ = sin으로 나타낼 수 있다. Fig. 4 ∼ Fig. 6의 동유체력 측정치에서 cross-flow drag 성분을 제외한 것을 양력 성분으로 간주한다.
Fig. 4와 Fig. 5의 커브핏팅 결과를 이용하여 Model-A에 작용 하는 동유체력의 성분 분석 결과를 Fig. 7과 Fig. 8에 나타낸다.
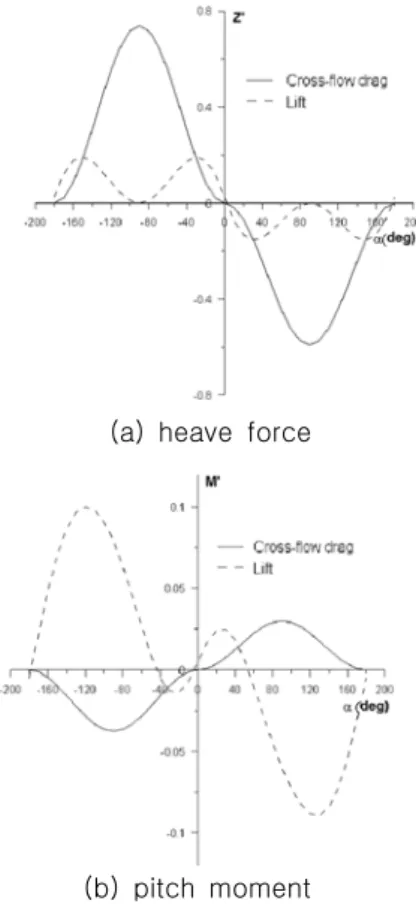
Fig. 7과 Fig. 8에서 Model-A의 경우 다음 사항을 알 수 있
다. ′ 와 ′ 의 경우 최대 양력치보다 cross-flow drag의 최
대값이 매우 크다는 것을 알 수 있다. 그리고 양력 성분은 받
음각 90° 부근에서 소멸됨을 알 수 있다. 즉, 양력은 수평운동
에서는 , 수직운동에서는 의 함수로서 표시됨을 알 수
있다. ′ 과 ′ 의 경우 부가물이 있는 경우에는 모형 형상 의 전후 비대칭성 영향으로 흐름이 앞쪽에서 유입될 때와 뒤 쪽에서 유입될 때의 양력의 크기에 상당한 차이가 있다는 것 을 알 수 있다. 이러한 영향으로, 특히, ′ 의 경우 부가물 유 무에 따른 동유체력 특성이 크게 달라짐을 알 수 있다.
(a) sway force
(b) yaw moment
Fig. 7 Components of hydrodynamic forces on Model-A at large drift angles
(a) heave force
(b) pitch moment
Fig. 8 Components of hydrodynamic forces on Model-A at large inclined angles
(a) heave force
(b) pitch moment
Fig. 9 Components of hydrodynamic forces on Model-B at
large inclined angles
그리고 Fig. 6의 측정 결과 중 유속 0.8 m/sec에서 Model-B 작용하는 동유체력의 성분 분석 결과를 Fig. 9에 나타낸다.
Fig. 9에 의하면 Model-B에 작용하는 동유체력 성분 분석 결 과는Model-A의 분석 결과와 약간 차이가 난다는 것을 알 수 있다. 즉, Model-B의 경우 cross-flow drag에 비해 양력의 최 대값이 비교적 크다는 것을 알 수 있다. 이것은 평판 특유의 현상으로서 설명될 수 있다(Lewis, 1989).
3.2 실물 수중운동체에 작용하는 동유체력의 추정
모형실험 결과로부터 실물 수중운동체의 운동 특성을 파악 하기 위해서는 모형과 실물의 Reynolds수의 차이에 기인하는 동유체력의 척도효과를 고려하여야 한다. 3.1절에서는 대각도 받음각을 갖는 수중운동체에 작용하는 동유체력을 양력 성분 과 cross-flow drag 성분으로 나누어 분석하였다. 일반적으로 양력 성분은 Reynolds수의 영향을 크게 받지 않는 것으로 다 루어지고 있다(Strom-Tejsen, 1965). 따라서 양력 성분은 모 형과 실물에 동일하게 작용하는 것으로 간주하고 cross-flow drag 성분만 척도효과를 고려하여 실물 수중운동체에 작용하 는 동유체력을 추정하기로 한다.
Table 2는 2차원 평판과 구(sphere)에 작용하는 cross-flow drag 계수를 나타내고 있다(Vennard and Street, 1982). Table 2에서 ‘Model’ 란은 Model-A의 실험 시의 Reynolds수에 대응 하는
값을 나타내고, ‘Full-scale body’ 란은 Model-A 형상 의 실물(Manta UUV : 길이 12 m, 폭 4.4 m, 높이 1.2 m, 속도 5 knot)의 Reynolds수에 대응하는
값을 나타내고 있다. 2차 원 평판의 경우에는 모형과 실물에서
값에 차이가 나지 않 는다. 그러나 구의 경우에는 모형과 실물에서
값에 차이가 나타나고 있음을 알 수 있다. 그리고 구의 경우 ➀, ➁로 구분 하여 나타낸 것은 사항시험과 영각시험에서 각각 Reynolds수 의 차이에 기인하여
값이 다르기 때문이다.
모형실험으로부터 구한 Model-A의
값으로부터 실물의
값을 추정하는 것은 매우 어렵다. 본 연구에서는 Table 2 에 나타낸 2차원 평판과 구의
값 변화율의 평균이 Model-A 형상에 적용되는 것으로 가정한다. 즉, Table 2에 기초하여 사항시험에서는 모형에 비해 실물이 약 77.5%, 영각
Table 2 cross-flow drag coefficients for flat plate of infinite length and sphere(Vennard and Street, 1982)
Shape
Flat plate Sphere
➀ ➁
Model 2.0 0.55 0.5
Full-scale body 2.0 0.3 0.4 : Reynolds number corresponding
to model or full-scale body ➀ : Horizontal static test of Model-A ➁ : Vertical static test of Model-A
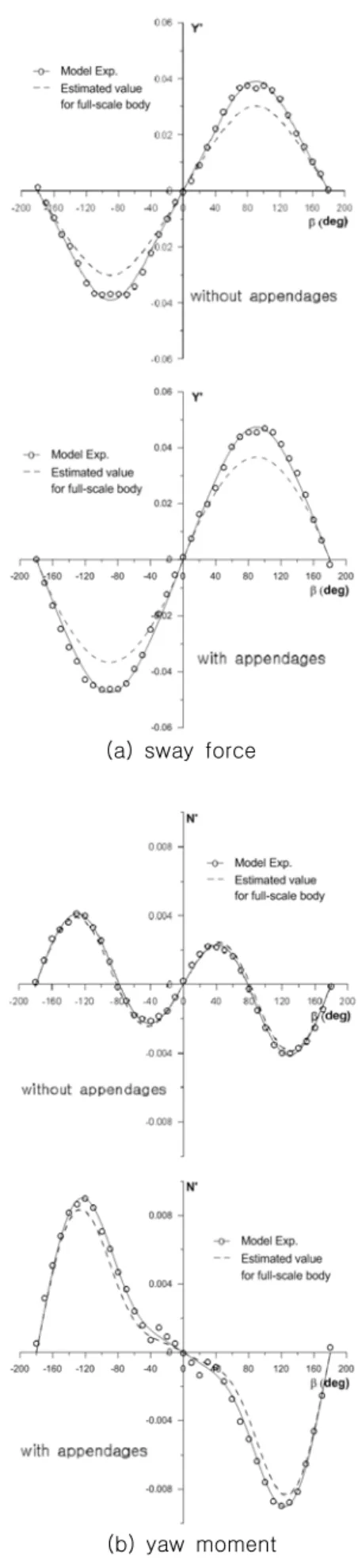
(a) sway force
(b) yaw moment
Fig. 10 Comparison of hydrodynamic forces acting on
Model-A and full-scale body at large drift angles
시험에서는 모형에 비해 실물이 약 90%의
값을 갖는 것으 로 가정한다. 이러한 가정을 적용한 배경은 다음과 같다. 앞에 서도 언급한 바와 같이 cross-flow drag에 미치는 Reynolds 의 영향은 물체 형상과 크게 관련이 있다. Model-A의 형상 즉, Manta 형상은 Reynolds수의 영향을 거의 받지 않는, 극한 적으로 얇은 형상인 평판에 미치는 Reynolds수의 영향과 Reynolds수의 영향을 크게 받는, blunt한 형상인 구에 미치는 Reynolds수의 영향을 함께 받는 것으로 가정할 수 있다고 생 각된다. 위의 가정을 적용하여 Manta UUV 실물 에 작용하는 동유체력을 추정하여 그 결과를 모형실험 결과와 함께 Fig.
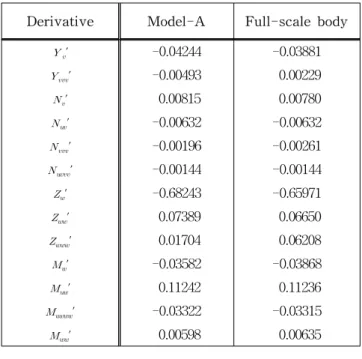
10과 Fig. 11에 나타낸다. 그리고 Manta UUV의 모형실험 결 과로부터 구한 유체력미계수와 Manta UUV 실물에 작용하는 유체력미계수의 추정치를 Table 3에 보인다. 유체력미계수를 구할 때 적용한 수학모델은 저자들의 이전 논문(Bae et al., 2010)에 상세히 기술되어 있다.
Fig. 10과 Fig. 11에서 전반적으로 ′ , ′ 의 분포는 모형 과 실물에서 cross-flow drag 계수의 차이에 기인하여 받음각 90° 부근에서 동유체력의 차이를 보이고 있다. 한편, 모형과 실물에서 cross-flow drag 계수에 차이가 나타나더라도 ′ ,
′ 의 분포는 전후 비대칭 형상의 경우에 한해서 모멘트의 차이가 미미하게 나타나고 있음을 알 수 있다.
(b) heave force
(b) pitch moment
Fig. 11 Comparison of hydrodynamic forces acting on Model-A and full-scale body at large inclined angles
Table 3 Comparison of hydrodynamic derivatives acting on Mode-A and full-scale body
Derivative Model-A Full-scale body
′
-0.04244 -0.03881
′
-0.00493 0.00229
′
0.00815 0.00780
′
-0.00632 -0.00632
′
-0.00196 -0.00261
′
-0.00144 -0.00144
′
-0.68243 -0.65971
′
0.07389 0.06650
′
0.01704 0.06208
′
-0.03582 -0.03868
′
0.11242 0.11236
′
-0.03322 -0.03315
′
0.00598 0.00635
4. 결 론
본 연구를 통하여, 대각도 받음각을 갖는 수중운동체에 작 용하는 동유체력의 특성을 실험적으로 검토하였다. 또한 동유 체력의 구성 성분을 양력과 cross-flow drag으로 구분하여 정 량화 하고 이들을 분석 비교하였다. 그리고 모형에 작용하는 동유체력 측정 결과로부터 실물 수중운동체에 작용하는 동유 체력을 추정하는 방법을 제안하였다. 앞으로, 수중운동체의 모 형실험 결과로부터 수학모델을 구성하고 수치 시뮬레이션 기 법을 이용하여 실물 수중운동체의 대각도 받음각을 갖는 조종 운동 특성을 파악하고자 할 때 유체력미계수에 Reynolds수의 영향을 고려함으로써 보다 정확한 조종운동 특성을 예측할 수 있을 것으로 생각된다.
후 기
본 연구는 방위사업청/국방과학연구소에 의해 한국해양대 학교에 설치된 수중운동체특화연구센터의 연구비 지원으로 수행되었음.
참 고 문 헌
[1] Bae, J. Y. and Sohn, K. H. (2009), "A study on Manoeuvring Motion Characteristics of Manta-type Unmanned Undersea Vehicle", Journal of the Society of Naval Architects of Korea, Vol. 46, No. 2, pp. 113-124.
[2] Bae, J. Y. and Sohn, K. H. (2010), “A Study on
Mathematical Model of Manoeuvring Motion of
Manta-type Unmanned Undersea Vehicle at Large Attack Angles,” Journal of the Society of Naval Architects of Korea, Vol. 47, No. 3, pp.328-341.
[3] Choi, J. R. (2008), “Analysis on Development Trend and Core Technology of Unmanned Underwater Vehicle”, Defense Science & Technology Plus, Vol.
65, Agency for Defense Development.
[4] Lewis, E. V. (1989), "Principles of Naval Architecture,"
Vol. lll, 2nd Revision, the Society of Naval Architects and Marine Engineers, Jersey City.
[5] Lisiewicz, J. S. and French, D. W. (2000), “Manta Test Vehicle At-Sea Test Results and Technology Demonstration Plans”, Proceedings, Undersea Defense Technology Conference, Europe.
[6] Newman, J. N. (1978), "Marine hydrodynamics, Mit press," pp. 217.
[7] Shin, Y. K., Lim, K. S. and Lee, S. K. (2005), “A Research of the Mathematical Modeling for the Estimation of Underwater Vehicle's Tail Plane Efficiency”, Journal of the Society of Naval Architects of Korea, Vol. 42, No. 3, pp. 190-196.
[8] Sirmalis, J. E., Lisiewicz, J. S. and Gagliardi, T. C.
(2001), “Pursuing the MANTA Vision : Recent At-Sea Technology Demonstration Results,” Proceedings, Undersea Defense Technology Conference, Hawaii.
[9] Son, N. S., Rhee, K. P., Lee, S. M. and Yeo, D. J.
(2001), “A Design of Collision Avoidance System of an Underwater Vehicle”, Journal of the Society of Naval Architects of Korea, Vol. 38, No. 4, pp. 23-29.
[10] Strom-Tejsen (1965), "A Digital Computer Techique for Prediction of Standard Maneuvers of Surface Ships,"
[11] Tamura, K.(1972), "Study on the Blockage correction,"
Journal of the Society of Naval Architects of Japan, Vol. 131 pp.17-28
[12] Umeda, N. and Yamakoshi, Y. (1989), "Hydrodynamic Forces Acting on a Longitudinally Non-symmetric Ship under Manoeuvring at Low Speed," Journal of the Kansai Society of Naval Architects, Vol. 127-138(in Japanese).
[13] U.S. Navy (2004), “The Navy Unmanned Undersea Vehicle(UUV) Master Plan”.
[14] Vennard, J. K. and Street, R. L. (1982), "Elementary Fluid Mechanics," Sixth Edition, pp. 628-634
[15] Yun, K. H., Rhee, K. P. and Yeo, D. J. (2005), “A Study on the Guidance Law Suitable for Target Tracking System of an Underwater Vehicle”, Journal of the Society of Naval Architects of Korea, Vol. 42,
No. 4, pp. 299-306.
원고접수일 : 2010년 12월 15일 심사완료일 : 2011년 3월 5일 원고채택일 : 2011년 3월 7일