UAV 영상정합을 통한 구조물 형상변화 측정 정확도 연구
Measurement Accuracy for 3D Structure Shape Change using UAV
Images Matching
*
김민철*ㆍ윤혁진**ㆍ장휘정***ㆍ유종수****
Kim, Min ChulㆍYoon, Hyuk JinㆍChang, Hwi JeongㆍYoo, Jong Soo
要 旨
최근 unmanned aerial vehicle(UAV)를 이용하여 영상을 취득하고 지도제작 및 3차원 형상을 구축하는 연구들이 활 발히 이루어지고 있다. 본 연구에서는 영상정합(image matching) 기술을 이용하여 3차원 형상을 재현하고, 형상 변 화가 있을 경우 이를 탐지하여 면적 및 부피를 계산하는 방법론을 제시하는 실험으로 측정 정확도를 평가하였다.
이를 위해 모의 구조물을 구축하여 형상변화 전·후의 UAV 영상을 취득하고, 영상정합 결과물인 포인트 데이터의 비교를 위해 변화 전 데이터는 격자 형태로 변환하여 높이 값을 비교하였다. 실험 결과, 제안된 방법은 가로·세로 30cm 이상의 형상변화는 매우 높은 정확도로 면적 및 부피를 계산하였으나, 그 이하의 형상변화는 아직 영상정합 기술의 한계에 기인하여 적용이 어려운 것으로 검증되었다. 하지만 제안한 방법론은 불법건축물 판별, 구조물의 일정규모 이상 피해의 정량적 분석 및 관리 등에 충분히 활용 가능할 것으로 생각된다.
핵심용어 : UAV 영상, 영상정합, 변화탐지, 정량적 분석
Abstract
Recently, there are many studies related aerial mapping project and 3 dimensional shape and model reconstruction using UAV(unmanned aerial vehicle) system and images. In this study, we create 3D reconstruction point data using image matching technology of the UAV overlap images, detect shape change of structure and perform accuracy assessment of area(㎡) and volume(㎥) value. First, we build the test structure model data and capturing its images of shape change Before and After. Second, for post-processing the Before dataset is convert the form of raster format image to ensure the compare with all 3D point clouds of the After dataset. The result shows high accuracy in the shape change of more than 30 centimeters, but less is still it becomes difficult to apply because of image matching technology has its own limits. But proposed methodology seems very useful to detect illegal any structures and the quantitative analysis of the structure's a certain amount of damage and management.
Keywords : UAV Image, Image Matching, Change Detection, Quantitative Analysis
1. 서 론
Unmanned aerial vehicle(UAV)는 항공영상을 취 득하고, 후처리하는 분야인 지도제작, 수치표고모델 제 작 등 다양한 응용분야에서 새로운 플랫폼으로 주목받 고 있다. UAV로 제작되는 시스템은 기존 항공촬영 시
스템과 비교하여 매우 저렴한 비용으로 구축 가능하므 로, 경제성이 매우 높은 효율적인 센서이다(Haala and Rothermel, 2012). UAV 영상에 적용하는 항공사진측 량은 최근 다방면으로 연구가 진행되고 있으며, 영상처 리 소프트웨어를 이용한 모델링과 고밀도 수치표면자 료(DSD, digital surface data) 생성 그리고 정확도 평
Received: 2017.01.31, revised: 2017.03.08, accepted: 2017.03.13
* 정회원ㆍ네이버시스템(주) 스마트컨버전스 기술연구소 선임연구원(Member, Research Engineer, Smart Convergence Research Team, NEIGHBOR SYSTEM Co.,Ltd., [email protected])
** 교신저자ㆍ한국철도기술연구원 ICT융합신기술연구팀 선임연구원(Corresponding Author, Research Engineer, ICT-Railroad Convergence Research Team, Korea Railroad Research Institute, [email protected])
*** 네이버시스템(주) 스마트컨버전스 기술연구소 수석연구원(Principal Research Engineer, Smart Convergence Research Team, NEIGHBOR SYSTEM Co.,Ltd., [email protected])
****정회원ㆍ네이버시스템(주) 스마트컨버전스 기술연구소 연구원(Member, Associate Research Engineer, Smart Convergence Research Team, NEIGHBOR SYSTEM Co.,Ltd., [email protected])
47 Vol.25 No.1 March 2017 pp.47-54
연구논문
ISSN: 2287-6693(Online) http://dx.doi.org/10.7319/kogsis.2017.25.1.047
가가 주요 연구 분야로 주목받고 있다(Lee, 2015).
Harwin and Lucieer(2012)은 UAV영상을 이용하여 영상정합(image matching)을 수행하고, 다수의 지상기 준점으로 정확도를 보정한 3차원 포인트 데이터 성과 물이 약 25-40mm까지 정밀한 결과를 산출될 수 있음 을 보여주었다. 또한 Fernandez et al.(2015)은 UAV로 취득한 특정 구조물의 고해상도의 수직(vertical) 영상 과 경사(oblique) 영상을 후처리하여 3차원 점군 데이 터를 취득하였으며, 이를 영상처리와 결합하여 구조물 손상도 분석 연구를 수행하였다. 이러한 UAV영상의 후처리는 컴퓨터비전 분야에서 주로 연구되고 있는 객 체 기반의 영상정합 알고리즘을 적용하여 영상들의 특 이점(keypoints)을 추출하며, David(2004)가 발표한 scale invariant feature transform(SIFT) 알고리즘이 영 상 크기와 회전에 구애받지 않는 안정적이고 정확한 결 과를 보이는 것으로 여겨지고 있다.
UAV 영상정합 기술을 이용한 3차원 형상 재현에 관 한 연구는 아직 초기 단계라고 할 수 있으며, 관련 연구 방향은 크게 정확한 3차원 데이터의 정밀한 구축 그리 고 그 데이터의 활용방안 두 가지로 나누어진다. 본 연 구에서는 UAV로 취득한 영상에 영상정합 기술을 적용 하여 3차원 형상 데이터를 생성하고, 한 단계 더 나아 가 포인트 데이터 기반의 수식연산 알고리즘을 적용하 여 변화영역의 면적과 부피가 얼마나 정확히 분석되는 지 정량적인 측정을 실시하였다.
2. 기본 이론 2.1 UAV 영상을 통한 3D 형상 재현
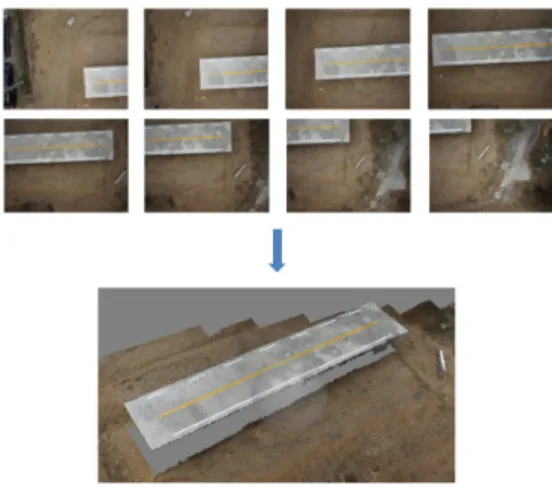
일반적으로 UAV 영상은 2차원 형태로 취득되나, 동 일 영역이나 객체를 중복적으로 촬영한 연속 영상들을 사용하여 3차원 형태의 객체 형상을 재현할 수 있다.
이는 취득된 영상들에 영상정합이라는 기법을 적용하 여 수행되며, 영상정합을 통해 수행되는 프로세스는 아 래 Fig. 1과 같이 다수의 중복영상에서 하나의 3차원 구조물 데이터를 생성한다.
영상으로 3D 형상을 재현하는 절차는 일반적으로 가 장 먼저 인접 영상들 간의 매칭을 위한 특징점을 추출 하는 단계로 시작한다. 많은 연구들과 상용 소프트웨어 에서는 주로 영상 크기와 회전에 불변하는 강력한 알고 리즘인 David(2004)가 제안한 SIFT를 사용하고 있다.
다음 단계에서는 영상들의 카메라위치와 자세정보를 이용하여 영상들 간의 상대적 위치를 결정하는 번들조 정(bundle adjustment)을 통해 대략적인(sparse) 형상을 추출한다. 추출된 대략적인 형상은 조밀한 점군 데이터
Figure 1. Example of Image matching
(point cloud) 구성을 통해 보다 세밀한 3D 형상을 재 현한다(Yasutaka and Jean, 2010). 3D 포인트 데이터 로 추출되는 구조물 형상은 최종적으로 보간 작업과 텍 스처 작업을 통해 실사와 유사한 모델 데이터로 구축된 다.
2.2 구조물 형상 변화탐지
형상 변화를 탐지하고자 하는 구조물들은 앞서 설명 한 영상정합 기술을 통해 3차원 포인트 데이터로 만들 어진다. 일반적으로 변화탐지는 동일한 영역이나 대상 물의 형상 변화 전․후의 데이터를 필요로 하며, 두 데이 터를 중첩하여 비교 대상 데이터가 가진 특정 수치 값 의 차이로 그 변화량을 추출․측정한다. 영상정합과 지상 기준점, 외부표정요소 등을 통해 수행된 지오레퍼런싱 작업으로 추출된 3차원 포인트 데이터는 개별 포인트 에 좌표정보(X, Y, Z)를 가지고 있으며, 이 좌표 값은 그 자체 혹은 특정 연산을 통해 형상변화 탐지 및 추출 을 위한 기준 값으로 활용된다.
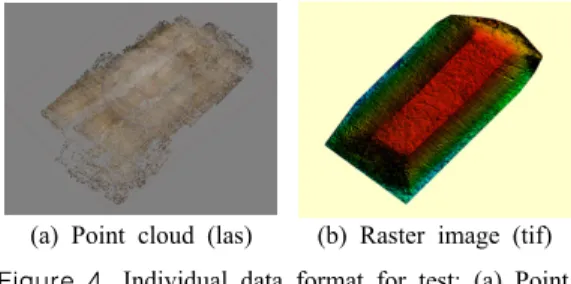
형상 변화탐지는 구조물의 형상 변화 전․후의 데이터 를 대상으로 동일한 수평위치(XY)의 높이 값(Z)이 차 이가 있는지 비교하는 방법을 통해 분석된다. 하지만 포인트 데이터의 경우, 고유의 불규칙한(irregular) 특 성에 기인하여 동일 위치의 단순 수치 비교가 불가능하 다(Fig. 2). 본 연구에서는 이러한 문제를 해결하기 위 하여 형상 변화 전·후 두 데이터 중 하나의 데이터는 일 정크기로 나누어진 격자(grid)에 높이 값을 갖는 래스 터(raster) 형식의 영상 데이터로 변환하여 불규칙 포인 트 데이터들의 모든 값이 비교 가능하도록 대응되는 픽 셀 값을 갖도록 하였다(Fig. 3). 본 연구에서는 사용한 변환된 영상 데이터는 래스터 형식으로 1cm 해상도의
Figure 2. XY position mismatch between point dataset
Figure 3. Configuration of corresponding data
(a) Point cloud (las) (b) Raster image (tif) Figure 4. Individual data format for test: (a) Point
cloud (las), (b) Raster image (tif)
tif 포맷으로 각 픽셀은 보간된 높이 값을 가지고 있으며, 보간법은 최근린보간법(Nearest neighbor interpolation) 을 사용하였다. 결국 형상변화 후의 영상정합 결과물은 3차원 포인트 데이터로, 형상변화 전 영상정합 결과물 은 래스터 영상 데이터로 변화탐지를 수행한다.
결국 Fig. 3의 형상변화 전 래스터 영상과 형상변화 후 포인트 데이터는 Fig. 4와 같은 형태로 제작된다.
2.3 포인트 데이터의 정량적 계산
동일 영역의 높이 값 비교를 통해 변화영역으로 탐지 된 부분은 해당 영역의 데이터를 추출하여 포인트 데이 터 기반으로 면적과 부피를 계산한다. 이는 개별 포인 트 데이터에 내재된 기하학적 특성인 xyz좌표 값과 포 인트 데이터의 후처리를 통해 생성한 불규칙삼각망
(TIN, triangulated irregular network)을 기반으로 면적 계산 알고리즘과 3차원 기반 부피 계산 알고리즘을 적 용한다.
2.3.1 포인트 데이터의 면적 계산
두 데이터의 형상변화 영역이 판단되면 영역내의 형 상변화 이후 포인트 데이터가 면적 계산 데이터로 추출 되며, 추출된 포인트 데이터는 클러스터링(clustering) 과정을 통해 하나의 그룹(group)이자 연산단위로 만들 어진다. 추출된 포인트는 불규칙삼각망을 구성하며, 구 성된 불규칙삼각망은 외곽선의 변들을 연결하여 면적 계산을 위한 하나의 단위를 생성한다(Fig. 5).
불규칙삼각망 외곽선을 연결하는 지점의 포인트 데 이터들은 개별 좌표 값의 수평요소인 xy값을 이용하여, Eq. (1)을 통해 면적을 계산한다.
(1) where, X and Y denotes the coordinate value of each point계산된 면적 수치는 형상변화 전·후 구조물 데이터 변화 영역의 총 면적으로 간주하여 정량적 분석을 수행 한다.
2.3.2 포인트 데이터의 부피 계산
포인트 데이터의 부피계산 원리도 변화 영역으로 판 별된 지점의 포인트 데이터들에 TIN을 구성하는 방법 론을 동일하게 적용한다. 부피 계산은 xy 좌표 값으로 TIN을 구성하여 2D 기반의 외곽선을 추출하는 면적계 산과는 달리 생성된 개별 TIN들의 Z값을 이용하여 삼 각기둥(triangular prism)을 생성한다. 이 단계에서 개 별 TIN으로 만들어진 삼각기둥들은 각각 부피를 계산
Figure 5. Find boundary of all the points using by TIN generation
Figure 6. Principle of TIN based Z value setting
하여 이를 모두 합산한 결과가 영역 내의 부피로 정 의된다. 개별 TIN으로 구성한 삼각기둥 하나의 부피 계산은 Eq. (2)와 같다.
×
(2) where, a, b, c denotes each side value of TIN, s denote area of TIN, Z denote the difference value between each Z vertex and reference Z valueEq. (2)에서 개별 TIN의 면적은 헤론의 공식 (Heron’s formula)을 이용하여 계산하며, 부피 계산을 위한 높이 값은 Fig. 6과 같이 TIN을 구성하는 세 점의 높이 평균값을 기준 값으로 사용한다. 이 평균 높이 값 은 형상변화 이전 데이터의 높이와 차이 값을 계산하게 되며, Ep. (2)에서의 Z값으로 적용된다. 결국 형상변화 영역의 개별 TIN은 삼각기둥 형태로 만들어지며, 개별 삼각기둥의 부피 값을 모두 합산하여 포인트 데이터의 부피 값을 계산하였다.
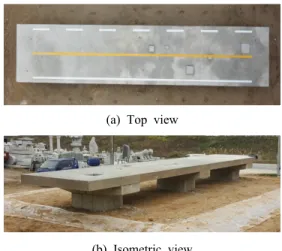
3. 연구방법 및 실험 3.1 모의 구조물 제작 및 UAV 영상 취득 본 연구에서는 국토교통부/국토교통과학기술진흥원 건설기술연구사업의 지원으로 구축한 모의 구조물을 대상으로 실험을 진행하였다. 모의구조물은 수변구조 물 중 하나인 교량의 형태이며, 가로 15m, 세로 3m, 두 께 30cm 크기로 제작하였다. 이 구조물은 실제와 최대
(a) Top view
(b) Isometric view
Figure 7. Test model RC(reinforced concrete) structure: (a) Top view, (b) Isometric view
Figure 8. Two types of shape change design
Figure 9. Structure with shape change applied
한 유사한 형태로 제작하기 위하여 실제 구조물과 같이 철근과 콘크리트를 사용하였다(Fig. 7).
형상변화의 추출 및 분석을 위해 Fig. 7에서 제작한 모의구조물에 두 가지 형태의 형상변화를 적용하였다.
첫째는 규격화된 크기의 형상변화 영역이며, 이는 형상 변화 영역의 면적과 부피를 정확하게 정량적으로 측정 가능한지 테스트하기 위한 것이다. 둘째는 다양한 형상 변화를 모두 탐지 가능한지 테스트하기 위한 불규칙 형 상변화이다. 두 가지 형태의 형상변화는 Fig. 8과 같이 모의구조물에 적용하였다. 여기서 구축된 모의 구조물은 형상변화 이전의 데이터를 취득하기 위한 목적으로 UAV 영상을 취득하였으며, 형상변화 이후 구조물을 위 하여 건설 장비들을 이용하여 구조물을 일부 파괴하였다.
Fig. 9는 형상변화를 적용한 실제 모의 구조물의 형 태이다.
형상변화 전·후의 구조물은 UAV를 이용하여 영상을 취득하였으며, 촬영에 사용된 비행체는 회전익 UAV이 다. 사용한 UAV 시스템과 카메라 제원은 Tables 1 and 2와 같다.
Model Gryphon Dynamics X8 Max. payload about 5000 g
Max. speed 12 m/s
Weight 10.8 kg (except Battery) Table 1. UAVs specification
Model Sony DSLR ILCE-7M2
Focal length 85 mm
Pixel size 6 μm
Weight about 1000 g
Image size 6000 × 4000 pixels Table 2. Digital camera specification
Area Yeoju Testbed
Image num. 16 images
Image size 6000 × 4000 pixels
Flying Height 30 m
Table 3. UAV image dataset
Figure 10. Used images of test
Figure 11. Distribution of ground control point
UAV 영상은 총 16장의 중복영상이며, 좌표계는 TM 중부원점, GRS80 타원체를 사용하였다. 촬영 영역의 전체 면적은 가로 30m, 세로 10m이며, 영상의 지상표 본거리(GSD, ground sample distance)는 0.7cm/pixel, 촬영 중복도는 평균 약 75%로 분석되었다. Table 3은 사용한 UAV영상에 대한 설명이며, Fig. 10은 실제 취 득한 영상이다.
영상매칭 결과물의 실세계 좌표화 작업을 위해 지오 레퍼런싱에 필요한 지상기준점 매설 및 GPS 측량/후처 리 작업을 수행하였으며, Fig. 11은 지상기준점 배치를 나타낸다.
3.2 구조물 데이터 구축
촬영된 영상의 3차원 형상 재현을 위한 후처리는 PhotoScan을 사용하였다. 촬영된 UAV영상과 영상들 의 외부표정요소(external orientation parameters)를 입
력하고, 지상기준점을 입력하여 지오레퍼런싱과 형상 재현의 정확도를 확보하였다. Align photo 기능으로 촬 영한 구조물의 전체적인 대략적인 형상을 재현하였으 며, Build Dense point cloud 기능을 수행하여 조밀하 게 제작된 3차원 형상을 재현하였다. 이는 Photoscan에 서 제공하는 일반적인 작업절차이며, 본 연구에서 촬영 한 UAV 영상을 이용하여 3차원 형상을 재현하는 작업 절차와 후처리 결과들은 아래 Fig. 12 and 13과 같다 (Agisoft, 2015).
Figure 12. 3D point cloud generation workflow
(a) Before shape change
(b) After shape change
Figure 13. Test data post-processing result: (a) Before shape change, (b) After shape change
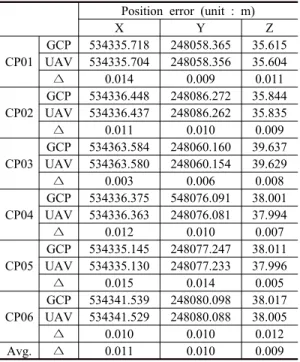
Position error (unit : m)
X Y Z
CP01
GCP 534335.718 248058.365 35.615 UAV 534335.704 248058.356 35.604
∆ 0.014 0.009 0.011
CP02
GCP 534336.448 248086.272 35.844 UAV 534336.437 248086.262 35.835
∆ 0.011 0.010 0.009
CP03
GCP 534363.584 248060.160 39.637 UAV 534363.580 248060.154 39.629
∆ 0.003 0.006 0.008
CP04
GCP 534336.375 548076.091 38.001 UAV 534336.363 248076.081 37.994
∆ 0.012 0.010 0.007
CP05
GCP 534335.145 248077.247 38.011 UAV 534335.130 248077.233 37.996
∆ 0.015 0.014 0.005
CP06
GCP 534341.539 248080.098 38.017 UAV 534341.529 248080.088 38.005
∆ 0.010 0.010 0.012
Avg. ∆ 0.011 0.010 0.009
Table 4. Positioning accuracy assessment
영상매칭을 통해 생성된 구조물의 3차원 형상 데이 터는 GPS측량을 통해 취득한 검사점과의 비교 결과, Table 4와 같이 모두 약 1cm 전후의 정확도를 보여주 었다.
3.3 형상변화 분석 실험 3.3.1 형상변화 탐지율 실험
생성된 고밀도 포인트 데이터는 상호 중첩을 통해 변 화영역을 측정하였으며, 앞서 언급했듯이 누락 없이 모 든 영역에서의 비교를 위하여 형상 변화 전 데이터는 래스터 형태인 tiff 형식(1cm 해상도)으로 변환하였다.
형상변화 전․후의 데이터는 동일 영역에서의 높이 값 비교를 통해 변화지역을 판별하게 되며, 이러한 중첩 비교와 높이 값 차이 탐지 실험을 위해 별도의 프로그 램을 구현하였다. 개발된 프로그램은 높이차가 10cm
Figure 14. Detect result of whole area
이상이 생기는 영역의 데이터를 찾도록 설계하였으 며, 육안 판독의 용이함을 위해 생성된 포인트 데이터 를 메쉬(mesh) 형태로 모델링하여 표출하였다. 전체적 인 형상변화 탐지 결과는 Fig. 14와 같다.
구조물 전체의 형상변화 탐지결과, 총 10개의 형상변 화 영역에서 총 8개의 형상변화 영역을 탐지하였으며, 탐지되지 않은 두 개의 영역은 불규칙적인 형상변화 영 역으로 10cm로 설정한 높이차이 이상으로 형상이 변 화되지 않았거나, 영상매칭 과정에서 오류가 생긴 영역 이었다.
3.3.2 형상변화의 정량적 변화량 분석
탐지된 형상변화 영역을 대상으로, 변화된 영역의 정 량적 값을 측정하기 위한 실험을 진행하였다. 실험 데 이터는 앞서 설명하였듯이 크기를 정확히 알고 있는 규 격화된 사전 정의된 크기의 변화를 대상으로 하였으며, 구조물에 적용한 형상변화 영역 분포는 Fig. 15와 같다.
Fig. 15와 같이 분포된 4개의 형상변화 영역은 Table 5와 같이 사전에 정의된 크기로 실측하여 제작하였다.
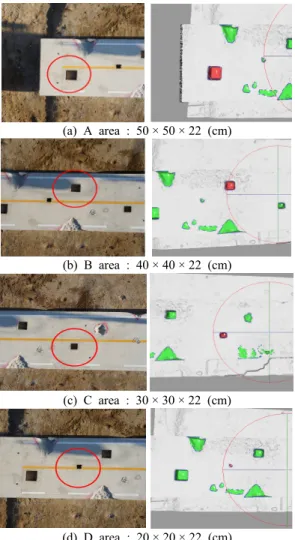
Fig. 16은 구조물 실험데이터의 변화영역의 면적 및 부피를 측정하기 위해 변화영역을 탐지한 실험 결과이 다. 실험은 가장 큰 크기의 변화영역인 가로․세로 50cm 부터 크기 순서로 실험하였다.
Fig. 16에서 변화 영역의 탐지를 수행한 각 영역 별 면적과 부피의 정량적 평가결과는 Table 6 and 7과 같다.
Table 6의 면적 측정에서 가로․세로 50cm 크기의 형 상변화의 경우, 오차율이 1.6% 정도로 매우 정확한 결 과를 보여주었다. 가로․세로 40cm와 30cm도 각각 8.75%, 4.44%로 비교적 정확한 결과를 보여주었으나, 20cm 크기인 D영역에서는 47.5%로 매우 큰 오차가
Figure 15. Distribution of shape change area
# Size (cm)
Width Length Height
A 50 50 22
B 40 40 22
C 30 30 22
D 20 20 22
Table 5. Pre-defined size shape changes
(a) A area : 50 × 50 × 22 (cm)
(b) B area : 40 × 40 × 22 (cm)
(c) C area : 30 × 30 × 22 (cm)
(d) D area : 20 × 20 × 22 (cm)
Figure 16. Detection result of pre-defined size : (a) A area, (b) B area, (c) C area, (d) D area
# manual measure
algorithm calculate
∆ value
error rate (%)
A 0.250 0.246 0.004 1.60
B 0.160 0.174 -0.014 8.75
C 0.090 0.086 0.004 4.44
D 0.040 0.021 0.019 47.5
Table 6. Error rates of area(㎡) value between measurement and algorithm calculated
발생되었다. 변화영역이 클수록 대체로 오차율이 작은 경향성을 가지나, B영역의 경우는 크기가 작은 C영역 보다 오차율이 크게 나와 경향성을 벗어났다. 이는 Fig.
16(b)의 영상에서 보듯이 주변 전봇대에 의해 생긴 그 림자가 영상에 반영되어 영상매칭 결과물에 일부 오류 를 발생시킨 것으로 확인되었다. Table 7은 형상변화의
# manual measure
algorithm calculate
∆ value
error rate (%)
A 0.050 0.053 -0.003 6.00
B 0.032 0.038 -0.006 18.75
C 0.018 0.015 0.003 16.67
D 0.008 0.001 0.007 87.50
Table 7. Error rates of volume(㎥) value between measurement and algorithm calculated
깊이 값을 고려한 부피계산 결과이다.
Table 7의 부피 측정에서도 형상 변화가 가로․세로 50cm, 깊이 22cm인 영역은 오차율 6%로 매우 정확한 결과를 보여주었으나, 20cm 크기에서는 매우 큰 오차 를 보였다. B, C의 결과로 유추해볼 때, 면적보다 부피 에서 다소 큰 오차가 발생하는 경향이 있다. 부피측정 에서도 면적과 마찬가지로 B영역의 경우, 그림자로 인 한 영상매칭 일부오류로 C영역보다 다소 높은 오차율 을 보인다. 결과적으로 영상매칭을 통해 생성된 3D 포 인트 데이터가 20cm 이하에서는 정량적 분석이 어려 우며, 30cm 이상의 변화 영역은 제안된 방법으로 변화 영역을 탐지하거나 정량적 분석이 가능함을 보여준다.
실험에서 발생한 오차의 가장 큰 원인으로는 UAV 영상 매칭에서 생성되는 불규칙 형태의 3D 포인트 데 이터 결과물의 특성이 가장 큰 영향을 미치는 것으로 파악되었다. 매칭을 통한 정량적 측정 및 분석은 작은 크기의 변화를 탐지하기에는 다소 어려워 보인다. 또한 본 연구에서 제안한 포인트 데이터의 면적 및 부피 계 산 알고리즘 자체에서 발생하는 오차가 있을 것으로 생 각되나, 이는 A영역의 측정 결과로 볼 때 매칭 결과의 오류와 비교하면 무시할만한 요소라 판단된다.
4. 결 론
본 연구에서는 구조물의 외형 변화를 탐지․관리하기 위하여 UAV 영상정합 기술을 이용하여 3차원 포인트 데이터를 생성하고, 결과의 정량적 분석을 수행하였다.
이를 위해 형상의 변화가 있는 구조물의 포인트 데이터 에 형상 변화 이전의 구조물 포인트를 영상으로 변환하 여 비교하였으며, 동일 영역의 높이 값 차를 계산하였 다. 제안된 방법의 적용을 위해 모의구조물을 제작하였 으며, 형상 변화 전후 데이터를 UAV영상과 지상기준 점을 이용하여 정밀하게 제작하였다. 3차원 포인트 데 이터는 면적과 부피 계산을 위해 TIN 기반의 알고리즘 을 개발하여 적용하였다.
실험결과, 제안된 방법론은 다양한 형태의 형상변화 를 3차원 기반으로 적절히 탐지하였으며, 더 나아가 정
량적인 측정도 가능함을 보여주었다. 규칙적인 형상변 화 실험을 통해 가로․세로 50cm 크기 영역은 면적오차 1.6%, 부피오차 6.0% 정도로 정확한 결과를 보여주었 으나, 변화 영역의 크기가 20cm 이하일 경우에는 탐지 는 가능하되 정량 계산은 어려운 것으로 판명되었다. 제안한 방법론은 실제 구조물이나 사회기반 시설물의 크기가 수 십 미터에서 수 백 미터의 크기임을 고려하 면, 불법건축물 판독 및 일정 크기 이상의 구조물 형상 변화를 탐지․계산하는데 충분히 활용 가능할 것으로 생 각된다. 특히 기존 항공측량 시스템에 비해 상대적으로 저비용인 UAV를 통한 영상취득은 매우 효율적이고 경 제성 높은 방법이라 할 수 있다. 하지만 정량적 계산에 오차를 유발하는 영상정합 기술의 한계와 UAV영상에 내재된 그림자, 폐색영역 등 오류 유발 인자들의 분석 이 필요하다. 또한 사용된 데이터들의 범위를 확장하여 다양한 촬영조건과 해상도의 영상을 실험하고, 포인트 데이터의 기하학적 특성인 불규칙함을 보완하는 방안 은 추가적으로 연구가 필요한 부분이다.
감사의 글
본 연구는 국토교통부/국토교통과학기술진흥원 건 설기술연구사업의 연구비지원(15건설기술S01)에 의해 수행되었습니다. 이에 감사드립니다.
References
1. Agisoft, 2015, Photoscan professional version, Agisoft, http://www.agisoft.com
2. David, G. L., 2004, Distinctive image features from scale-invariant keypoints, International Journal of Computer Vision, Vol. 60, No. 2, pp. 91-110.
3. Fernandez, G., Kerle, N. and Gerke, M., 2015, UAV-based urban structural damage assessment using object-based image analysis and semantic reasoning, Natural Hazards and Earth System Sciences Discussions, Vol. 15, Issue 6, pp. 1087- 1101.
4. Harwin, S. and Lucieer, A., 2012, Assessing the accuracy of georeferenced point clouds produced via multi-view stereosis from unmanned aerial vehicle(UAV) imagery, Remote Sensing, Vol. 4, Issue 6, pp. 1573-1599.
5. Haala, N. and Rothermel, M., 2012, Dense multiple stereo matching of highly overlapping UAV imagery, Proc. of the XXII ISPRS Congress 2012, International Society for Photogrammetry and Remote Sensing, Melbourne, Australia, pp. 387-392.
6. Lee, Y. C., 2015, Assessing the positioning accuracy of high density point clouds produced from rotary wing quadrocopter unmanned aerial system based imagery, Journal of the Korean Society for Geospatial Information Science, Vol. 23, No. 2, pp.
39-48.
7. Yasutaka, F. and Jean, P., 2010, Accurate, dense, and robust multi-view stereopsis, IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol.
32, Issue 8, pp. 1362-1376.