자동충전 시스템을 위한 오차보정이 가능한 유연한 도킹 메커니즘
Flexible Docking Mechanism with Error-Compensation Capability for Auto Recharging System
노 세 곤1, 박 재 훈1, 송 영 국1, 양 광 웅2, 최 무 성2, 김 홍 석2, 이 호 길2, 최 혁 렬1†
Se-gon Roh1, Jae Hoon Park1, Young Kook Song1, Kwang-Woong Yang2, Moosung Choi2, Hong-Seok Kim2, Ho-Gil Lee2, Hyouk Ryeol Choi1†
Abstract
The docking and recharging system for a mobile robot must guarantee the ability of the mobile robot to perform its tasks continuously without human intervention. In this paper, two docking mechanisms are proposed with localization error-compensation capability for the auto recharging system. Friction forces or magnetic forces are used between the docking parts of the docking module and those of the docking station. In addition, an auto recharging system is developed to control the power. Since the system is modularized, it can easily be adapted to other robots.
Keywords
: Auto Recharging System, Docking System, RCC
1. 서 론
생물과 더불어 활동을 필요로 하는 모든 것들은 그 활동 을 지속시키기 위해서 반드시 에너지를 필요로 한다. 최근 부각되고 있는 로봇연구분야에 있어서도, 로봇이 다양한 임무를 연속적으로 수행하기 위해서는 로봇의 에너지를 일정하게 유지시킬 수 있는 기술이 필수적이다. 이와 같이 에너지를 일정하게 유지시키기 위해서 태양에너지를 이용 한다던가[1], 곤충을 잡아 이를 전기적 에너지로 변환하여 이용하는 연구도 수행되었으나[2], 대부분의 로봇은 에너지 를 유지시키기 위해 충전기능을 탑재한 도킹스테이션 (docking station)에 자신이 탑재한 배터리(battery)를 결합하 여 충전할 수 있도록 설계된 도킹 시스템(docking system)을 사용하고 있다. 이러한 도킹 시스템에 대한 연구는 주로
지능형 모바일 로봇에 적용되는 형태로 개발되고 있으며 1953년 Grey Walters가 라이트 비콘(light beacon)을 이용하여 로봇을 외부충전장치에 유도하는 연구[3]를 시작으로 현재 까지 다양한 방법이 제안되었다. 적외선 송/수신기(Infrared LED emitter/receiver)를 이용하여 이동로봇이 도킹스테이션 을 찾아가는 방법은[4][5], 현재 미국 iRobot사의 Roomba, 독 일 Karcher사의 RC3000 등의 청소로봇과 같이 상용화된 저가형 모바일 로봇 등에서 주로 사용되는 범용적인 방법 이다. 그 외에 스웨덴 Electrolux사의 Trilobite는 도킹스테이 션 내의 자석선(magnetic line)을 로봇이 감지하여 도킹스테 이션에 접근하는 방법을 사용하기도 한다. 보다 정밀하고 안정적인 도킹을 위해서는 비전(vision) 및 초음파센서(ultra sonic sensor)를 이용하여 도킹 스테이션을 찾고, 도킹 성공 률을 높이기 위한 도킹부의 메커니즘 개발도 수행되고 있 다[6]. 이와 같은 도킹 기술의 개발이 필요한 근본적인 원인 은 모바일 로봇은 통상적으로 이동 중에 위치추정 (localization) 오차가 발생한다는 점에 있다. 더군다나 도킹 은 물리적인 충격을 동반하는 하드웨어적인 접촉과 전기 적인 연결이 자동적으로 수행되어야 하기 때문에 보다 정 밀한 위치, 자세 보정을 위한 제어가 필요하다. 이러한 제
※ 본 연구는 산업자원부 퍼스널로봇 기반기술 개발 과제 지원으로 수행되었음.
† 교신저자:성균관대학교 기계공학부 교수 (E-mail :[email protected])
1 성균관대학교 기계공학부 (E-mail :[email protected], [email protected], [email protected])
2 한국생산기술연구원 (E-mail :[email protected], [email protected], [email protected], [email protected])
어를 위해서는 도킹만을 위한 고가의 고정밀 센서가 탑재 되어야 하는 비효율적인 시스템 구성이 요구된다. 이와 같 은 문제점을 극복하기 위해서는 도킹 시 로봇의 접근 오차 를 로봇제어의 의존도를 줄이고 물리적으로 손쉽게 보상 할 수 있는 기구적 구성에 대한 연구가 필요하나 아직까지 이에 대한 연구는 미비하고 그러한 연구에 의해 제안된 방 법으로는 오차 보상 가능 범위가 상당히 작아 실질적인 효 율성을 보여주지는 못하고 있다.
본 논문에서는 앞서 언급한 바와 같이 로봇제어의 의 존도를 줄이고 기구적 구성만으로 손쉽게 도킹을 가능하 게 하는 두 종류의 도킹 메커니즘을 소개한다. 첫 번째는 도킹부의 마찰력과 링크 및 슬라이더의 조합을 이용하며 기구적으로 안정적이기 때문에 신뢰성 높은 도킹 성공률 을 보여주는 구조이다. 두 번째는 첫 번째 Prototype의 기구적인 장점을 수용하고 자석의 인력과 척력을 조합하 여 도킹연결부가 능동적으로 회전, 또는 병진 운동하는 것처럼 동작하여, 보다 유연한 도킹을 가능하게 한다. 더 불어 도킹이 가능한 위치, 자세 허용범위를 높여주어 단 순히 기구적인 구성으로서 얻을 수 있는 도킹가능 범위 의 한계를 극복시키는 구조이다.
본 논문의 다음과 같은 구성을 갖는다. 2장에서는 도킹 부가 장착되어 동작하게 될 모바일 로봇 플랫폼과 장착 된 센서, 자동충전을 위한 하드웨어 구성에 대하여 간략 하게 소개하고 3장에서는 제안하는 두 가지의 도킹 메커 니즘 각각의 특징과 장점에 대하여 설명한다. 4장에서는 제안하는 메커니즘에 의한 실험과 그 결과를 보여주어 그 실효성과 타당성을 검증한다.
2. 모바일 로봇 플랫폼 2.1 모바일 로봇 플랫폼의 구성
제안하는 도킹 메커니즘이 장착되는 모바일 로봇 플랫 폼(mobile robot platform)은 모듈기반으로 개발되었다.
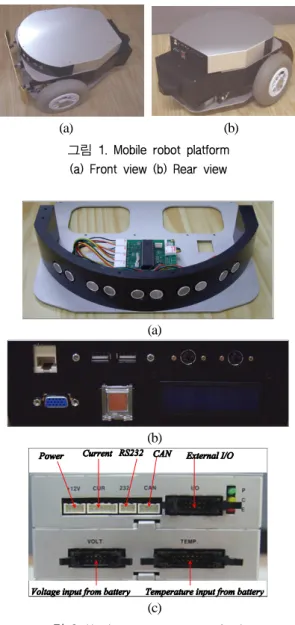
모바일 모듈은 구동을 위해서 기구적으로 그림 1과 같이 전방부에 두 개의 구동바퀴와 후방부에 서스펜션 (suspension)이 장착된 캐스터(caster)가 장착되어 있으며 도 킹메커니즘이 장착될 도킹모듈을 위한 200mm x 100mm x 100mm의 공간이 로봇의 후방부에 배치되어 있다.
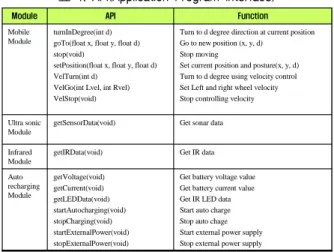
그림 2에서와 같이 장애물 감지를 위한 초음파 센서 모듈, 사용자가 로봇과 정보를 주고 받고 로봇을 테스트 하기 위한 컨트롤 패널(control panel), 배터리의 전압, 전 류 및 온도를 체크하여 로봇의 주제어기인 SBC(Single Board Computer)에 그 값을 전달하는 BMS(Battery Management System) 등은 물리적으로 모듈화되어 쉽게 장착/제거된다. 그 외에 충돌방지를 위한 리밋 스위치
(a) (b) 그림 1. Mobile robot platform
(a) Front view (b) Rear view
(a)
(b)
(c)
그림 2. Hardware components of robot (a) Ultra sonic module (b) Control panel (c) BMS
(limit switch)가 장착된 범퍼(bumper)모듈, 도킹유도를 위 한 적외선 센서 모듈, 리튬이온폴리머 배터리팩(lithium polymer battery pack: 22.2V, 11Ah), 등이 포함되어 있고 CAN 통신 모듈(PCM-3680)이 장착되어 있어 적외선 센 서 모듈, 도킹모듈, BMS와 통신이 가능하다.
2.2 자동충전
본 논문에서 자동충전은 로봇 스스로 배터리 전압이 떨어지면 배터리를 충전하고 배터리가 충전되는 상황에 서도 로봇은 구동 가능한 상태로 유지되고, 충전이 완료 되면 도킹스테이션으로부터 이탈하여 수행 중이던 임무 를 계속 하도록 하는 것을 의미한다. 제안하는 자동충전 시스템은 컨트롤 보드를 사용하여 배터리 상태에 따라
D o c k i n g S t a t i o n S M P S ( 2 4 V , 2 5 A )
C h a r g e r ( 1 7 0 W )
D C / D C
A c t u a t o r S e n s o r s B M S
B a t t e r y ( 6 8 5 . 1 W : 2 2 . 1 V , 3 1 A ) D C / D C
D C / D C R o b o t 2 4 V C h a r g i n g & B a t t e r y
2 4 V E x t e r n a l P o w e r 5 V
S i g n a l L i n e
C o n t r o l B o a r d 1 D o c k i n g M o d u l e
S B C S S R 1
S S R 4
S S R 5 S S R 2 S S R 3
C o n t r o l B o a r d 2
그림 3. Circuit of auto recharging system
각각의 SSR(Solid State Relay)을 제어함으로써 전원 공 급을 제어하고 차단하는 기술을 바탕으로 하고 있다[7].
자동충전에 필요한 모든 회로와 자동충전 및 적외선 송/수신을 담당하는 컨트롤 보드는 로봇에 부착되는 도킹 모듈과 도킹스테이션에 내장되어 있다. 도킹 모듈 내의 컨트롤 보드는 로봇의 SBC와 CAN 통신을 통하여, BMS 으로부터 배터리에 대한 전압, 전류, 온도 정보를 받을 수 있게 설계되었다. 이러한 정보를 이용하여 배터리 잔 류량에 따라 충전 시점을 결정하고 배터리의 이상 유무 를 모니터링 하게 된다. 또한 도킹스테이션과 도킹 모듈 은 GND, 외부 전원, 충전 전원, 5V의 도킹여부 신호전달 단자 등 총 4개의 단자를 가지고 있다.
그림 3은 자동충전 시스템의 전원 및 신호 라인 의 흐름을 나타낸다. 자동충전의 과정을 살펴보면, 로봇이 구동 상태에서는 SSR3을 거쳐 배터리(22.1V, 31A)로부터 전원을 공급받으며 움직인다. 로봇이 도킹스테이션에 도킹을 성공적으로 이루게 되면, 5V 신호 단자를 이용하여 컨트롤 보드2는 컨트롤 보드 1에 도킹 여부를 전달하고 컨트롤 보드1로부터의 신호를 이용하여 도킹 성공 여부를 결정하게 된다.
이와 같은 전기적 방법으로 도킹 모듈의 컨트롤 보 드는 도킹 성공 여부를 확인하고 아래와 같은 순서 로 자동충전을 위한 단계를 수행하게 된다. 첫 번째 로, 외부 전원 구동 단계는 로봇이 외부 전원만으로 구동되는 상태를 말하며 아래와 같은 방법으로 수 행된다. 각 컨트롤 보드에서 도킹 성공을 확인하면 컨트롤 보드2에서는 SSR4을 구동시켜 SMPS (Switching Mode Power Supply)로부터 외부 전원(24V, 25A)을 도킹스테이션 외부 전원 단자에 공급시킨다.
그 후 컨트롤 보드1은 SSR1을 구동시켜 외부 전원 을 로봇에 공급하고, SSR3을 이용하여 로봇으로 공 급되는 배터리 전원을 중단한다. 두 번째 단계인 충 전 단계에서는 컨트롤 보드간의 5V 도킹여부 신호
전달 단자를 이용해 도킹스테이션에 충전 명령을 내리게 되면 컨트롤 보드2는 SSR5를 구동시켜 배 터리 충전 전원을 도킹스테이션 단자에 공급하게 된다. 그 후 컨트롤 보드1은 SSR2를 연결하여 배터 리를 충전하게 된다. 로봇은 충전 중에도 BMS를 통하여 배터리 상태를 계속 체크하게 되며, 이러한 배터리 정보를 바탕으로 충전 완료 시점을 결정하 게 되고 충전완료를 결정하게 되면 마지막 단계인 충전 완료 및 도킹스테이션 이탈 단계를 수행하게 된다. 이 단계는 첫 번째, 두 번째 단계의 역순의 과정으로 이루어지게 된다. 먼저 배터리 충전을 중 단시키기 위하여 SSR2와 SSR5를 중단시키고 SSR3 을 이용하여 배터리 전원을 로봇에 공급하게 된다.
그 후 SSR1, SSR4를 중단시켜 외부 전원을 중단시 키게 된다. 전원이 공급되는 각각의 부분에는 쇼트 키다이오드(schottky barrier rectifier diode)를 배치하여 예기치 못할 역전류 발생에 대비하였다. 또한 SSR 과 다이오드는 방열판을 부착하여 로봇 구동 시 발 생하는 열을 배출 가능하도록 하였다.
2.3. 소프트웨어 구조
로봇의 운영체제로서 리눅스 커널 2.4.20을 기반으로 하는 RT리눅스(RT Linux) 3.1이 포팅(porting)되었고, 1GBytes의 컴팩트 플래시(compact flash)를 주 저장장치 로 사용하고 있다. 로봇에 부착된 각 모듈의 기능을 수행 하는 소프트웨어는 하드웨어와 마찬가지로 모듈화 기반 으로 개발되었다. 표 1에서와 같이 각 모듈의 소프트웨어 는 API (Application Programming Interface)로 개발되어, 자동충전 모듈을 다른 이동 로봇 플랫폼에 적용하더라도 미리 작성된 프로그램을 수정 없이 쉽게 적용 할 수 있 도록 하였다.
표 1. API(Application Program Interface)
Get battery voltage value Get battery current value Get IR LED data Start auto charge Stop auto chage Start external power supply Stop external power supply getVoltage(void)
getCurrent(void) getLEDData(void) startAutocharging(void) stopCharging(void) startExternalPower(void) stopExternalPower(void) Auto
recharging Module
Get IR data getIRData(void)
Infrared Module
Get sonar data getSensorData(void)
Ultra sonic Module
Turn to d degree direction at current position Go to new position (x, y, d)
Stop moving
Set current position and posture(x, y, d) Turn to d degree using velocity control Set Left and right wheel velocity Stop controlling velocity turnInDegree(int d)
goTo(float x, float y, float d) stop(void)
setPosition(float x, float y, float d) VelTurn(int d)
VelGo(int Lvel, int Rvel) VelStop(void) Mobile
Module
Function API
Module
P e g
K G
K x
H o l e C h a m f e r
(a) (b)
그림 4. Theory of RCC
(a) Approach of docking module (b) Docking
3. 도킹 메커니즘
3.1 Prototype I
Prototype I의 도킹모듈은 로봇이 도킹스테이션에 접근 할 때 생기는 거리, 각도 오차를 보상하기 방법으로 RCC(Remote Center Compliance)의 기본적인 원리를 이
용하였다[8, 9].
그림 4는 제안하는 Prototype I의 운동을 간단히 표현하기 위해 2차원적으로 도시한 자유물체도이다. 도킹부로 들어 가는 기둥 모양의 튀어나온 부분을 Peg라 하며, 도킹 시 Peg가 들어가게 되는 부분을 Hole이라 지칭한다. Peg가 도 킹부의 Hole로 들어가도록 가이드 역할을 해주는 경사진 부분을 Chamfer라 부른다. 원기둥 모양의 Peg는 좌/우로
K
x의 스프링 상수를 가지고 직선 움직임이 가능하며, 또 한K
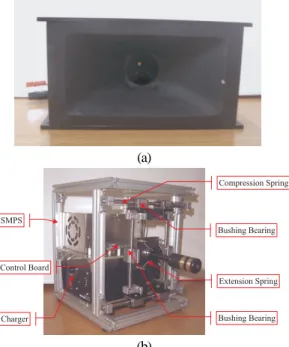
θ 의 회전 방향의 스프링 상수를 가진다. 이때 좌우 및 회전 움직임은 같은 평면상에서 발생한다. 그림 4(a)와 같이 Peg가 Hole에 접근하게 되면 Peg는 Chamfer와 접촉하 면서 스프링의 작용에 의해 병진, 회전운동을 하게 되면서 그림 4(b)와 같이 도킹을 완료하게 된다.실제로 개발된 Prototype I의 로봇에 장착된 도킹 모듈은 그림 5(a)와 같으며 3차원 Chamfer 형상을 갖는다. Peg가 장착된 도킹 스테이션은 그림 5(b)에서 보여주고 있다.
로봇이 도킹스테이션으로 접근함으로써 Peg가 로봇의 도 킹 모듈의 Chamfer를 따라서 Bushing 베어링과 압축 스프 링에 의해 좌우상하로 병진운동을 하고, Peg가 연결된 도 킹스테이션 부분의 볼 조인트와 인장 스프링에 의해 전 방향으로 조향할 수 있다. Peg가 도킹 모듈의 Hole로 진 입하여 도킹을 성공하게 되면 Hole 내부의 접지 단자와 연결된 마이크로 스위치(micro switch)를 누르게 되어 도 킹 여부를 도킹스테이션의 마이크로 컨트롤러(micro controller)가 인식하게 된다. 또한 도킹 성공 후에도 외부 의 간섭 또는 로봇이 진입하던 힘의 반작용에 의하여 도 킹이 실패하는 경우가 생기게 된다. 이러한 문제점을 방
지하기 위하여 그림 6과 같이 도킹 고정부가 개발 되었다.
도킹이 성공하게 되면 마이크로 컨트롤러는 양쪽에 위치 한 솔레노이드(solenoid)를 구동시켜, 2개의 고정부가 Hole이 빠져나가지 않도록 도킹을 고정하게 되고 더불어 충전 및 외부 전원 단자들 간의 접촉을 도와주는 역할도 하게 된다.
(a)
B u s h i n g B e a r i n g B u s h i n g B e a r i n g
C h a r g e r
C o m p r e s s i o n S p r i n g
S M P S
C o n t r o l B o a r d
E x t e n s i o n S p r i n g
(b)
그림 5. Docking mechanism of Prototype I (a) Docking module of robot (b) Docking station
(a)
S o l e n o i d E x t e r n a l P o w e r C o n n e c t o r
R e c h a r g i n g P o w e r C o n n e c t o r
(b)
그림 6. Connection of docking parts (a) Structure of docking parts (b) Fixing mechanism
3.2 Prototype II
Prototype II는 RCC 메커니즘을 응용하고 자석의 인력과 척력을 이용하여 엑츄에이터를 사용하지 않고서도 능동적 으로 기구부를 움직이게 하여 오차를 보상할 수 있는 메커 니즘이다. 자력에 의하여 오차 보상이 이루어지지만, 자력 의 힘이 충분하지 않게 되는 경우를 대비하여 기본적인 로 봇의 도킹 모듈과 도킹스테이션의 도킹부 형상은 Prototype I에서 고려했던 방법으로 Chamfer 형상을 이용하였다. 오 차 보상을 위한 움직임이 가능하도록 도킹스테이션 도킹 부는 그림 7(a)에서 볼 수 있듯이 부싱(busing)베어링 및 스 프링을 이용하여 전/후 방향의 직선 움직임이 가능하도록 설계되었으며 토션스프링(torsion spring) 및 구름베어링을 사용하여 회전도 가능하다. 도킹 모듈의 도킹부는 그림 7(b)와 같이 LM(linear motion) 가이드 및 복귀스프링(return spring)을 이용하여 그림 7(c)와 같이 좌/우 직선 움직임이 가능 하도록 설계되었다. 이러한 도킹부의 설계는 도킹 시 가까운 거리에 접근 했을 때 자력이 작용하여 회전 및 병 진운동을 하여 미리 마중 나와 있는 형태가 되어, 효과적 으로 도킹시 발생하는 충격을 줄여 줄 수 있다.
(a)
(b)
D o c k i n g s t a t i o n
D o c k i n g m o d u l e
L M G u i d e
(c)
그림 7. Docking mechanism (a) Docking parts of docking station (b) Docking parts of docking module (c) Docking motion
(a) (b)
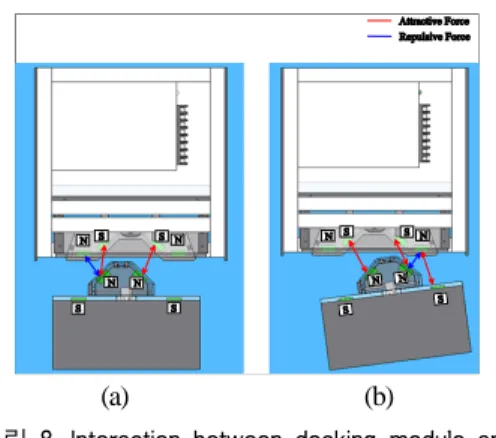
그림 8. Interaction between docking module and docking station (a) Case 1 (b) Case 2
인력과 척력의 관계는 그림 8와 같이 작용하며, 이를 이용하여 도킹 모듈의 도킹부가 도킹스테이션의 도킹부 에 들어가 접촉되게 된다. Case 1은 좌/우 거리 오차를 가 지고 로봇이 접근하는 모습을 나타내고 있다. 이러한 경 우 도킹스테이션 도킹부의 N극과 도킹 모듈의 도킹부 N 극 사이에 척력이 작용하게 되어 도킹 모듈의 도킹부가 도킹스테이션의 형상에 맞도록 마치 엑츄에이터에 의해 동작하듯이 움직이게 된다. 그리고 도킹 모듈의 N극과 도킹스테이션의 S극간의 인력으로 도킹스테이션의 도킹 부는 로봇 쪽으로 이동하면서 서로 결합하게 된다. Case 2 는 좌/우 거리 및 각도 오차를 가지고 로봇이 접근하는 모습을 나타내고 있다.
이러한 경우는 서로간의 거리가 가까운 오른쪽의 N극 과 S극의 인력으로 인해 도킹스테이션의 도킹부가 로봇 방향으로 접근할 뿐만 아니라 도킹스테이션의 S극과 도 킹 모듈의 N극간의 인력으로 도킹스테이션 도킹부의 각 도가 변화하여 서로 도킹을 성공하게 된다. 또한 도킹이 결합된 후에도 도킹부 간의 인력과 도킹스테이션의 전/후 방향 직선 움직임이 가능한 자유도는 도킹의 결속을 유 지시켜 각 단자의 접촉이 떨어지는 것을 방지한다.
실제로 개발된 도킹스테이션과 도킹 모듈은 그림 9와 같다.
(a) (b) 그림 9. Prototype II
(a) Docking station (b) Docking module
그림 10. Homing and docking experiment
그림 11. Docking experiment of prototype
4. 실 험
실험은 로봇이 도킹스테이션에 호밍(homing)하기 위해 자율 주행을 하다가 도킹하는 방법으로 실험이 진행되었 다. 그림 10은 로봇이 도킹하는 실험 과정을 보여주고 있 다. 로봇은 step 1과 같이 자율 주행을 수행하다가, 적외선 신호를 인식하게 되면 호밍 알고리즘을 기반으로 step 2, 3,
그림 12. Docking experiment of prototype II
4의 순서로 도킹 가능 거리에 도달하게 된다. 그 후 step 5와 같이 180도 회전하여, 최종적으로 step 6에서 볼 수 있듯이 도킹을 성공하게 된다.
도킹 메커니즘의 검증을 위한 Prototype I 과 II의 실험 은 각각 그림 11과 그림 12에서 보여주고 있다. Prototype I 의 경우 그림 11의 step 1과 같이 로봇의 도킹부가 진입을 하게 되면 step 2와 3의 과정에서 Chamfer를 따라 Peg가 최종적으로 Hole 내로 결합하게 된다. Prototype II에서는 그림 12의 step1에서 로봇의 도킹부가 도킹스테이션 도킹 부에 Case 2와 같이 비스듬하게 접근하게 되면 step 2에서 확인할 수 있듯이 서로간의 척력에 의하여 도킹스테이션 의 도킹부가 로봇의 도킹부와 결합할 수 있는 방향으로 회전한 후 인력에 의하여 step 3, 4와 같이 로봇의 도킹부 가 좌우로 움직이면서 도킹하게 된다.
각각의 실험은 로봇의 접근 오차 보상을 위해 개발된 도킹 메커니즘의 실효성을 검증하기 위하여, 도킹부 간의 좌우 거리 오차만 존재하는 경우(Case 1)와 좌우 거리와 진입각도 오차가 동시에 존재하는 경우(Case 2)로 나누어 각각 10회 실시하였다. 실험결과 그림 13과 그림 14에서 볼 수 있듯 각각의 경우 설계시 고려하였던 오차 범위 내에서는 도킹 성공률이 100%로 만족스러운 결과를 나 타내었다. 오차 허용범위를 크게 설정하면 모듈의 크기가 커지므로 설계시 오차 허용 범위를 용도에 맞게 설정해 야 한다. 또한, Prototype II의 경우 자력의 세기에 따라 이
그림 13. Docking success rate according to error distance
그림 14. Docking success rate according to error distance
탈 시 필요한 힘이 달라지게 된다. 이에 따라 자력이 다 른 다양한 자석을 사용하여 이탈 실험을 실시 하였으며 이에 따라 로봇이 도킹 되었을 때 외부 충격에 영향을 받지 않고 이탈 시 로봇이 가진 출력만으로 이탈이 가능 한 자석을 사용하였다.
5. 결 론
본 논문에서는 모바일 로봇에 적용할 수 있는 두 가지 도킹 메커니즘을 제안하였다. 로봇이 충전을 위해 호밍하 는 과정에서 적외선 센서에 의해 발생하는 각도 및 위치 오차는 좌우 6센티미터, 20도 이내에 존재한다. 따라서, 제안하는 메커니즘은 모바일 로봇 센서의 부정확한 정보 에 의해 야기되는 통상적인 위치추정 오차를 충분히 보 상할 수 있도록 설계되어 유연하고 강인한 도킹 성공률 을 보여준다.
본 논문에서는 기존의 방식처럼 센서에 크게 의존하지 않으면서 오차 보정이 가능한 기구 구성으로 강인한 도 킹이 가능함을 보였다. 따라서, 본 연구자들은 제안하는 도킹 메커니즘이 자율충전이 필요한 다양한 로봇에 적용 할 수 있을 것으로 기대한다.
[1] J. C. Kolecki, “Electrostatic charging of the Mars
Pathfinder rover and charging phenomena on the planet Mars,” Digital Object Identifier 10, Vol. 1, pp. 749-752, 2000.
[2] I. Kelly, O. Holland, and C. Melhuish, “SlugBot: A Robotic Predator in the Natural World,” Proc. Int. Symp.
Artificial Life and Robotics for Human Welfare and Artificial Life Robotics, pp. 470-475, 2000.
[3] W. G. Walter, “The Living Brain,” W. W. Norton, New
York, 1953.
[4] K. Roufas, Y. Zhang, D. Duff, M. Yim, “Six degree of freedom sensing for docking using IR LED emitters and receivers”, Proc. Int. Symp. Experimental Robotics, pp.
91-100, 2000.
[5] M. C. Silverman, D. Nies, B. Jung, G.S. Sukhatme,
“Staying alive: a docking station for autonomous robot recharging," Proc. IEEE Int. Conf. Robotics and
Automation, Vol. 1, pp. 1050-1055, 2002.
[6] R.C. Luo, C.T. Liao, K.L. Su, K.C. Lin, “Automatic Docking and Recharging System for Autonomous Security Robot,” Proc. IEEE/RSJ Int. Conf. Intelligent
Robotics and Systems, pp. 2953-2958, 2005.
[7] S. G. Roh, S. M. Baek, D. H. Lee, K. H. Park, T. K.
Moon, S. W. Rew, J. Y. Kim, T. Y. Kim, H. S. Kim, H.
G. Lee, H. R. Choi, “Development of Personal Home Robot Platform: Designed Approach for Modularization,”
Proc. Int. Conf. Control, Automation and System, pp.
2313-2318, 2000.
[8] K.L. Du, B.Z. Liao, X. Huang, J. Hu, “Dynamic Analysis of Assembly Process with Passive Compliance for Robot Manipulators,” Proc. IEEE Int. Symp. Computational
Intelligence in Robotics and Automation, Vol.3, pp. 16–
20, 2003.
[9] D. Shetty “Compliant gripper for precision robotic assembly” Proc. IEEE Int. Conf. Systems Engineering, pp.
335– 338, 1990.
노 세 곤
2000 성균관대학교 기계공학부 (공학사)
2002 동대학원 메카트로닉스 공학 (석사)
2006 동대학원 메카트로닉스 공학 (박사)
2006~현재 성균관대학교 기계기술연구소 연구원 관심분야 : 로봇 메커니즘, 로봇 어플리케이션, 배관로봇
최 혁 렬
1984 서울대학교 기계공학과 (공학사)
1986 한국과학기술원 기계공 학과 (석사)
1994 포항공과대학교 기계공 학과 (박사)
1986~1989 LG 전자 정보기술 연구소 주임연구원 1993~1995 일본정부 문부성 초청 동경대학 연구원 1999~2000 일본 AIST 초빙 연구원
1995~현재 성균관대학교 교수
2005~현재 IEEE Transaction on Robotics Associate Editor 관심분야 : field robotics, dextrous hand, haptic display,
artificial muscle actuator
송 영 국
2007 성균관대학교 기계공학 부 재학 중
2002~현재 성균관대학교 기 계공학부 학사과정
관심분야 : 메카트로닉 시스템, 센서
박 재 훈
2007 성균관대학교 기계공학부(공학사)
2007~현재 성균관대학교 기 계공학과 석사과정
관심분야 : 메카트로닉 시스템, 모바일 로봇, 로봇 메커 니즘.
이 호 길
1980 한양대학교 기계공학과 (공학사)
1986 오사카대학교 기계공학 (석사)
1989 오사카대학교 로봇공학 (박사)
1980~1982 현대정공 사원
1989~1991 (일본) ASTEM 연구소 주임연구원 1991~현재 한국생산기술연구원 수석연구원 관심분야 : 로봇제어, 신호처리, 로봇환경기술
김 홍 석
1980 서울대학교 공과대학전기공학과 (공학사) 1983 서울대학교 대학원 제
어계측공학과 (석사) 1990 서울대학교 대학원 제
어계측공학과 (박사) 1983~1987 한국과학기술연구원 응용전자연구실 연
구원
1990~1991 한국과학기술연구원 응용전자연구실 연 수연구원
1991~현재 한국생산기술연구원 로봇기술개발본부 제어 지능연구팀 수석연구원
관심분야 : 제어이론, 제어기 설계 및 평가, 시뮬레이션 (simulation), 전자회로, 마이크로프로세서 /DSP 응용, 로보틱스 및 S/W 개발환경
최 무 성
2001 한양대학교 기계공학부 (공학사)
2003 한양대학교 정밀기계공 학과 (석사)
2003~현재 한국생산기술연구 원 근무
관심분야 : human-like intelligent systems, Robot hardware platform design, biped robot
양 광 웅
1996 인하대학교 자동화공학과 (공학사)
1998 인하대학교 자동화공학 과 (석사)
1998~2002 ㈜두산메카택 근무 2002~현재 한국생산기술연구원 근무
관심분야 : robot software architecture, distributed Computing, software engineering